
Abstract
For a four wheeled mobile robot a trajectory tracking concept is developed based on its kinematics. A trajectory is a time–indexed path in the plane consisting of position and orientation. The mobile robot is modeled as a non holonomic system subject to pure rolling, no slip constraints. To facilitate the controller design the kinematic equation can be converted into chained form using some change of co-ordinates. From the kinematic model of the robot a backstepping based tracking controller is derived. Simulation results demonstrate such trajectory tracking strategy for the kinematics indeed gives rise to an effective methodology to follow the desired trajectory asymptotically.
Introduction
A mobile robot is one of the well known system with nonholonomic constraints and there are many works on its tracking control. Their objective are mostly the kinematics model. For non holonomic systems such as mobile robots their kinematics constraints make time derivative of some configuration variables nonintegrable (Xiaoping, Y. & Yamamoto, Y., 1996). Due to the appearance of the nonholonomic constraints the motion planning and the tracking control of mobile robots are difficult to be managed. In the phase of motion planning (Wilson, D.E., and Luciano, E.C., 2002) a suitable trajectory is designed to connect the initial posture (i.e the position and orientation of the robot) and the final one such that no collisions with obstacles would occur and kinematics constraints are satisfied. Once the feasible path is obtained the navigation and control process enters the tracking phase. In this paper we restrict our attention to the kinematics of the nonholonomic systems such that every path can be followed efficiently. In (Kanayama, Y., kimura, Y., Miyazaki, F. & Noguchi, T., 1990) a linearization based tracking control scheme was introduced for a two degree of freedom mobile robot. A similar idea was independently examined by Walsh et al. in (Walsh, G., Tilbury, D., Sastry, S., Murray, R. & Laumond, J.P., 1994). The idea of input-output linearization was further explored by (Oelen, W. & Amerongen, J., 1994) for a two degree of freedom mobile robot. All these papers solve the local tracking problem for some classes of nonholonomic systems. The class of nonholonomic system in chained form was introduced by (Murray, R. M., & Sastry, S.S., 1993) and has been studied as a bench mark example by several authors. It is well known that many mechanical system with nonholonomic constraints can be locally or globally, converted to chained form under coordinate change and state feedback. Interesting examples of such mechanical systems include tricycle-type mobile robots, cars towing several trailers, the knife edge (Murray, R. M., & Sastry, S.S., 1993), (Kolmanovsky, I. & McClamroch, N. H., 1995). Trajectory planning algorithm for a four-wheel-steering (4WS) vehicle based on vehicle kinematics was introduced by (Danwei, W. & Feng, Q., 2001). Trajectory tracking control of tri-wheeled mobile robots in skew chained form system was introduced by (Tsai, P.S., Wang, L.S., & Chang, F.R., 2006).
In this paper we develop the kinematic model of a four wheel nonholonomic mobile robot subject to pure rolling and no side slipping condition and we propose a systematic control design procedure for chained form obtained from the kinematic model. The stepwise control design procedure used in this paper is based on the backstepping approach. The problem to be solved here is the tracking of a desired reference trajectory for a four wheeled mobile robot moving on a horizontal plane and simulation results were presented to illustrate the approach.
Model of the mobile robot
Introduction
In this section kinematic model of the four wheel nonholonomic mobile robot is presented. In order to simplify the mathematical model of the four wheel nonholonomic wheeled mobile robot we assume that
The wheeled mobile robot is built from rigid mechanism. There is zero or one steering link per wheel. All steering axes are perpendicular to the surface of motion. The surface is a smooth plane. No slip occurs between the wheel and the floor.
Instantaneous centre of rotation (ICR)
It is an imaginary point around which a rigid body appears to be rotating momentarily (for an instant) when the body is rotating and translating. For a four wheel mobile robot the instantaneous centre of rotation is the cross point of all axes of the wheels. Its importance lies in the fact that wheel axes must intersect at a point if there is no slipping.
Kinematic model of the four wheel mobile robot
In this section the kinematic model is developed. A wheeled mobile robot is a wheeled vehicle which is capable of an autonomous motion (without external human driver) because it is equipped, for its motion, with motors that are driven by an embarked computer. The four wheel mobile robot considered in this paper is shown in figure 1, its front wheels are steering wheels, and its rear wheels are driving wheels. The distance between the front wheel axle and platform centre of gravity is c and distance between the rear wheel axle and platform centre of gravity is d and 2b is the wheel span. The trajectory planning will be done for the platform centre of gravity. Let the generalized co-ordinates be q = [x0, y0, φ0, φ]T, where (x, y) are the cartesian coordinates of the centre of gravity of the mobile platform with respect to co-ordinate frame {U}. The four wheels are located at p1, p2, p3 and p4 on the mobile platform respectively. pc is the centre of the mobile platform. Six co-ordinate frames are defined for describing position and orientation of the mobile robot.{1} is the frame fixed on wheel 1. x1 - axis is choosen to be along the horizontal radial direction and y1 axis in the lateral direction. Likewise {2},{3} and {4} are the frame defined for the wheel 2, 3 and 4 respectively.{0} is the frame defined at point pc. The orientation of the vehicle body is characterized by φ0 which is the angle from xU to x0. f1 and f2 are the front two steering angle and φ is the angle at which the whole platform changes the orientation due to steering angles φ1 and φ2 of the front two steering wheels. With these notations we establish homogenious transformations describing one frame relative to another.


Four wheel mobile robot and co-ordinate frame
With the help of homogenious transformation given above the velocities of point p1, p2, p3 and p4 can be easily computed.
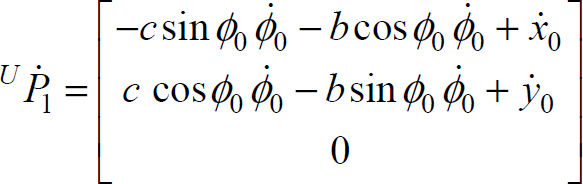
The homogenious position vector of point p1 in frame {0} is

The same point is represented in frame {U} by

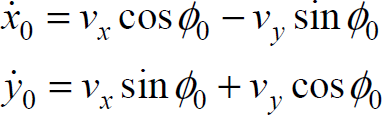
The velocity of point p1 relative to frame {U} expressed in frame {U} is then
In order to derive the nonholonomic constraint equation of wheel 1. The velocity of point p1 relative to frame {U} is expressed in frame {1} is

Similarly the velocity of point 2, 3, 4 relative to frame {U} expressed in frame {2}, {3} and {4} as follows

Constraint equations
To develop the kinematic model of the wheeled mobile robot, the ith wheel is considered as rotating with angular velocity
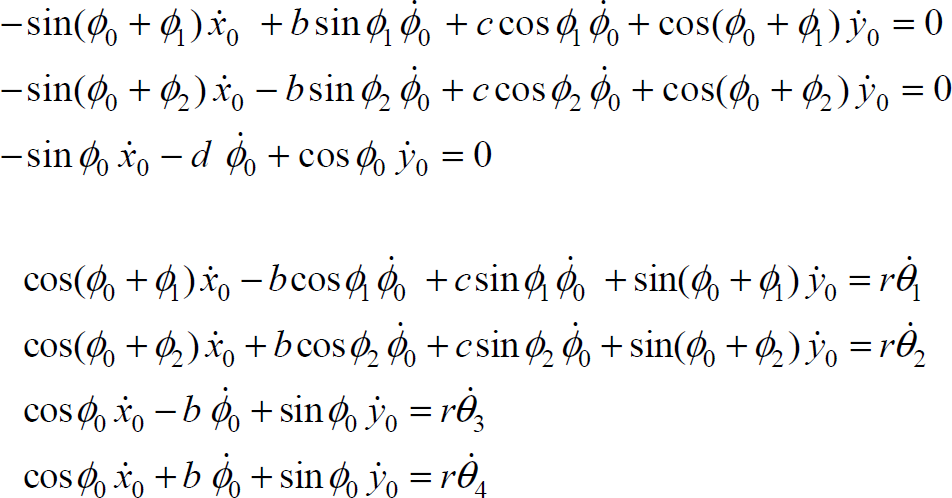

Velocities of wheels
Where r is the radius of each wheel and θ1, θ2, θ3 and θ4 are the angular displacement of the wheels.
Choosing the following as generalised co-ordinate vector

The seven constraint can be written as

where A is a 7 × 8 matrix given by

Now using the fact that wheel axes must intersect at a point when the mobile robot turns. Thus we get

and
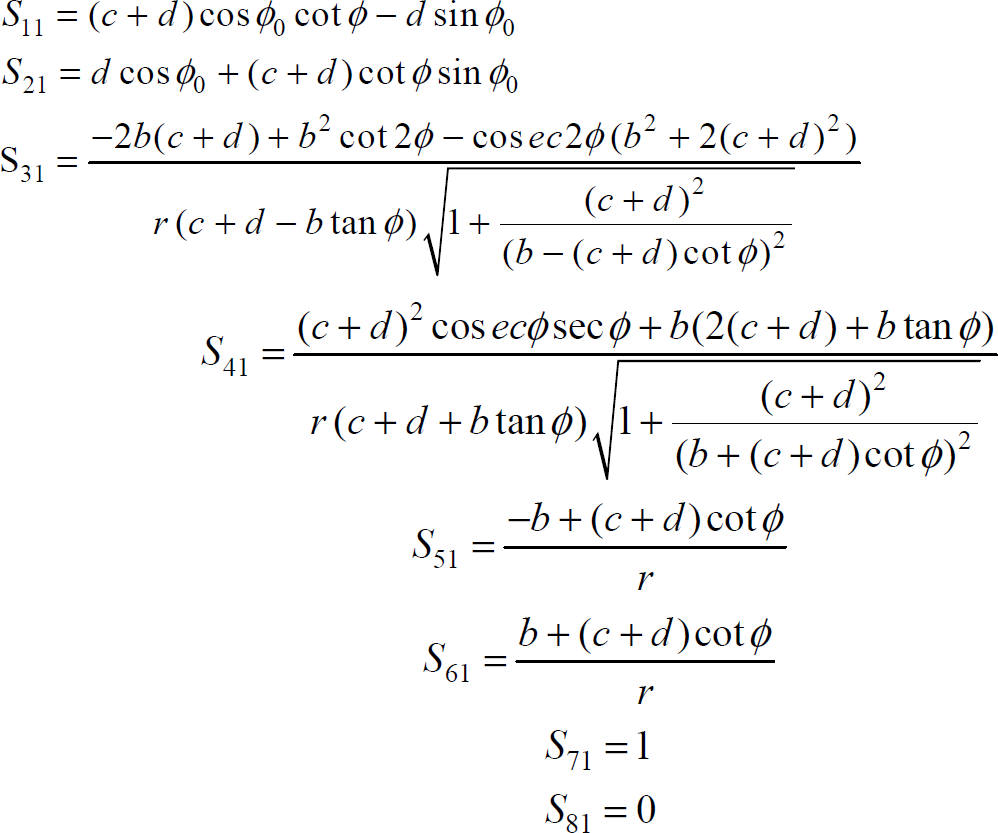
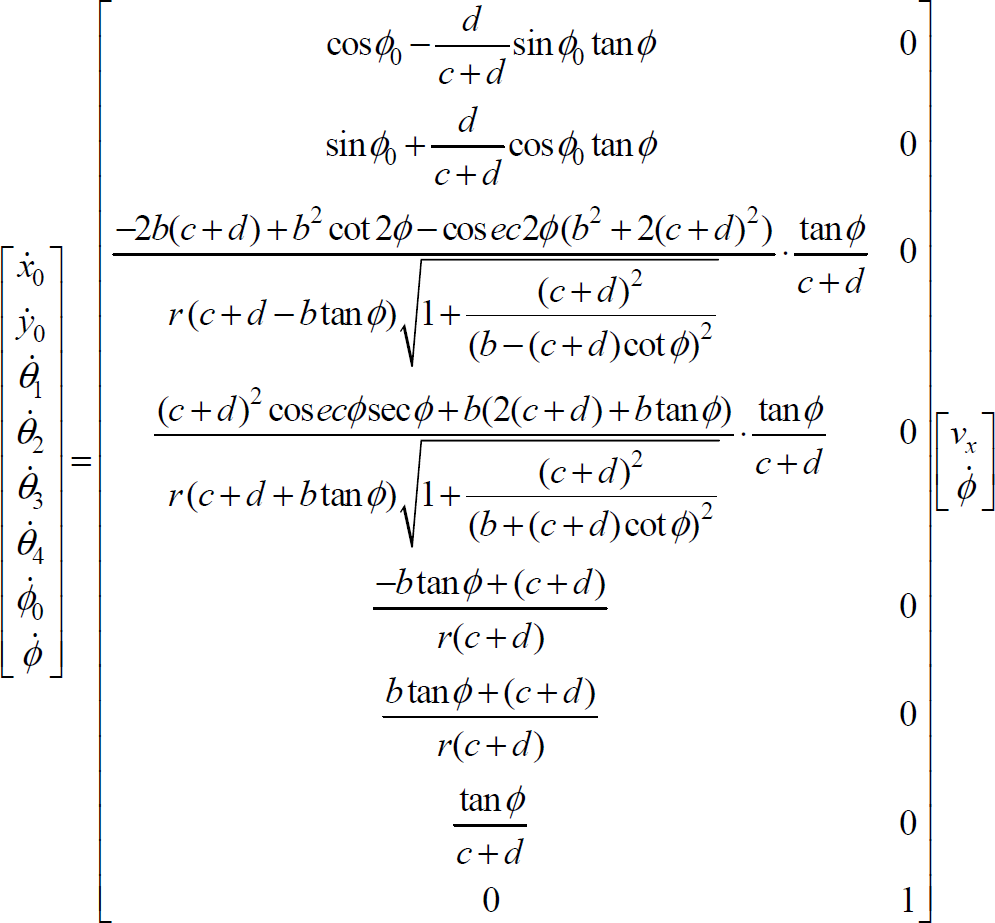
We introduce a vector of quasi velocities instead of generalized velocities because control runs in an abstract space. Quasi-velocities are function of kinematic parameters. Since the generalised velocities is always in the null space of A(q) according to (1) the generalized velocities q can be expressed in terms of quasi-velocities v(t) as follows

where s(q) is a 8 × 2 full rank matrix, whose columns are in the null space of A(q) and is given by (using the MATHEMATICA package)

Where
Define
where
Since the control objective for the robot is to ensure that q(t) tracks a reference position and orientation denoted by q
d
(t) = [x
d
(t), y
d
(t), φd0(t)] so we consider only

Where v1 = v
x
and
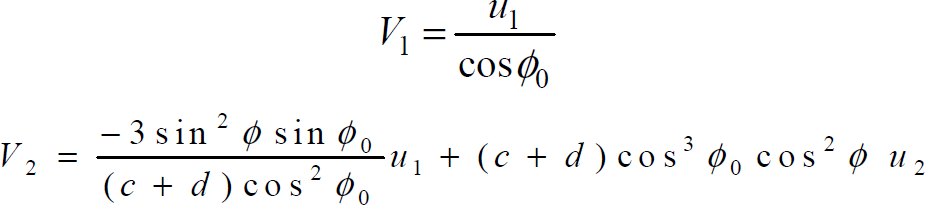
In order to convert the kinematic model of the mobile robot in chained form following change of co-ordinates is used.

Together with two input transformations
Then from above transformation we get the following two input four state chained form

where x = (x1, x2, x3, x4) is the state and u1 and u2 are the two control inputs.
Denote the tracking error as x
e
= x - x
d
. The error differential equation are

The goal is to find a, Lipschitz continuous time-varying state-feedback controller

such that the tracking error x
e
converges to zero asymptotically, i.e
We first introduce a change of coordinates and rearrange system (5) into a triangular –like form so that the integrator backstepping can be applied.
Denote

In the new coordinates ζ = (ζ1, ζ2, ζ3, ζ4) system (5) is transformed into

The basic design idea for backstepping based control law is to take for every lower dimension subsystem, some state variables as virtual control inputs and at the same time, recursively select an appropriate Lyapunov function candidate. Thus each step results in a new virtual control -er. In the end of the overall procedure, the true control law results which achieves the original design objective.
Consider the ζ1 - subsystem of (6)

We consider the variable ζ2 as virtual control input and the variable ud1 and ζ4 as time varying functions.
Denote
Differentiating the function

Since the variable ζ2 is a virtual control input.
Selecting ζ2 = -k1ζ1 k1 ≥ 0
From above equation we observe that function α1(ζ1) = 0 is a stabilizing function i.e the desired value of virtual control ζ2 for which V1 is negative semi definite for subsystem (7). This desired value is called stabilizing function and ζ2 is called virtual control. As in this case

Above implies that

So the origin ζ2 = 0 is asymptotically stable. Hence the function α1(ζ1) = 0 is a stabilizing function.
Define
Differentiating the function

along the solution of (6) yields

As
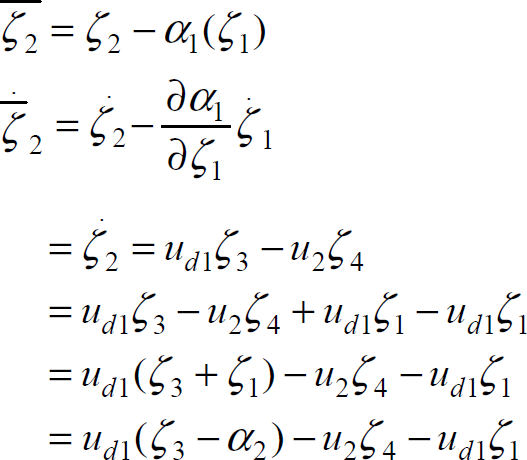
Where

Again define

Consider the positive definite and proper function

Differentiating the function V3 along the solution of (6) yields

In order to make V3 negative definite we choose the following control input

where c3 > 0.
Thus we have

Finally consider the positive definite and proper function which serves as a candidate Lyapunov function for the whole system (6)

Where Λ > 0 is a design parameter.
Differentiating the function V4 along the solution of (6) yields

In order to make V4 negative definite we choose the following control input


To examine the effectiveness of the proposed trajectory tracking control methodology, the simulation for a four wheeled mobile robot were performed in MATHEMATICA. The system parameters of the four wheel mobile robot were selected as c=1.3m, d=1.4 m, 2b=1.5m.
Tracking a straight line
Tracking a straight line is a simple case for all robots. Here for simulation we consider that the straight line. We choose the following as design parameters Λ = 5, c3 = c4 = 2 for tracking a straight line. It is further assumed that initially x e (0) = (2, 0.8, 0.8, 0.8).
The straight line reference trajectory to be tracked is given by x d (t) = t, y d (t) = 0.
The desired trajectory and the norm of the tracking error is shown in Fig. 3 and fig.4 respectively.

Desired straight line trajectory
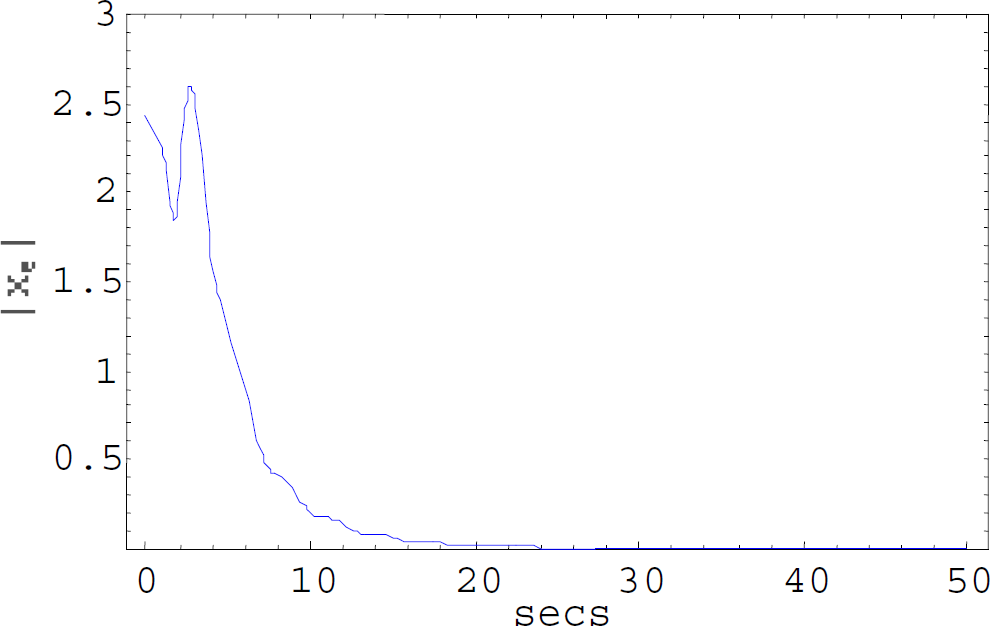
Norm of tracking error x e (t) versus time
we consider the following desired sinusoidal trajectory x d (t) = t, y d (t) = a sin ωt as shown in Fig. 5.

Desired sinusoidal trajectory
Fig.7 demonstrates the evolution of the norm of the tracking error x
e
(t) based on the following choice of design parameters and initial condition:

Desired steering angle versus time

Norm of tracking error x e (t) versus time
In this paper the nonholonomic constraints and the kinematics model of the four wheel (front steering and rear driving) mobile robot under pure rolling and no side slipping condition is derived. Using the change of coordinates the system is transformed into chained form and then a backstepping based tracking controller is derived. Simulation results are presented with two examples to illustrate the approach.
Footnotes
Acknowledgement
The author Umesh Kumar gratefully acknowledges the financial support of University grant commission (UGC), Government of India through senior research fellowship with grant No. 6405-11-61.
The author Nagarajan Sukavanam acknowledges financial support by the Department of Science and Technology (DST), Government of India under the grant No. DST-347-MTD.