
Abstract
With complex dynamic characteristics in many variables changing during actual operation, a Mecanum-wheeled mobile robot (MWMR) causes many difficulties for path planning and control. In addition, in many applications, robots need to operate automatically and find the optimal path. This article proposes intelligent MWMR path planning based on the real-time rapidly exploring random tree* (RT-RRT*) and optimal interval type 2 fuzzy logic controller (IT2FLC). First, the path planning of the MWMRs in dynamic environments is developed by RT-RRT*. Second, the optimal IT2FLC is designed for MWMRs based on the genetic algorithm. The pre-treatment and post-treatment coefficients of IT2FLC are optimized with the goal of achieving the best trajectory quality of the robot. This helps the robot to operate independently and accurately, and complete tasks in environments with many complex disturbances. Various trajectories are given to test the performance of the proposed approach. The results show that the efficiency of the designed method is better than that of a type 1 fuzzy logic controller (traditional fuzzy logic controller) and proportional–integral–derivative under the same conditions.
Introduction
Mobile robots play a crucial role in various applications, including industrial automation, logistics, and autonomous navigation in many important fields such as agriculture, 1 exploration, 2 rescue, 3 and so on. Among different types of mobile robots, the Mecanum-wheeled mobile robot (MWMR) 4 offers superior maneuverability due to its omnidirectional movement capabilities. These robots employ custom-engineered mecanum wheels that enable omnidirectional movement without necessitating a change in orientation, rendering them highly suitable for confined environments where accurate trajectory control is critical. This type of robot is capable of operating autonomously, working in dangerous or hard-to-reach environments. In real applications, unfortunately, mecanum-wheeled mobile robots inevitably face many complex uncertainties caused by non-holonomic constraints and complex dynamics. These challenges make the field highly attractive to researchers, pushing advancements in mobile robot path planning based on intelligent algorithms.
Path planning is a crucial aspect of robotics and autonomous navigation, enabling robots to find optimal or feasible routes in complex environments.5–7 Among various approaches, random path planning techniques offer flexibility and adaptability in dynamic and unpredictable settings. Real-time rapidly exploring random tree* (RT-RRT*) 8 is a novel approach inspired by the erratic yet goal-oriented movements of rabbits in nature. Rabbits often navigate their surroundings using a combination of random exploration and strategic decision-making to avoid obstacles and reach safe destinations. Similarly, RT-RRT* leverages randomized path selection while continuously adapting based on the environmental feedback, making it well-suited for real-time applications. 9 This method is particularly effective in environments where traditional deterministic algorithms struggle due to uncertainties, dynamic obstacles, or incomplete information. By incorporating elements of randomness and real-time decision-making, RT-RRT* aims to enhance efficiency, adaptability, and robustness in robotic path planning. Guo et al. 10 propose the hierarchical rapidly exploring random tree algorithm based on potential function lazy planning and low-cost optimization* (HPO-RRT*) algorithm, designed to enhance unmanned aerial vehicle (UAV) navigation in dynamic settings. This algorithm integrates a hierarchical planning structure with an optimized sampling strategy, enabling UAVs to efficiently generate collision-free paths in environments with moving obstacles. Xu 11 provides a comprehensive overview of the developments in rapidly exploring random tree (RRT) algorithms. The article delves into theoretical enhancements, such as improvements in branching strategies, sampling methods, post-processing techniques, and the integration of model-driven approaches. Lee et al. 12 introduce an enhanced path planning algorithm aimed at improving dynamic obstacle avoidance for aircraft. Building upon the traditional RRT framework, the proposed method incorporates directed sampling strategies to efficiently navigate complex airspaces. Xu et al. 13 introduce the informed anytime fast marching tree* (IAFMT*) algorithm, an advancement in sampling-based motion planning. IAFMT* is designed to efficiently find asymptotically optimal paths by integrating informed sampling strategies with an anytime framework, allowing for rapid initial solutions that improve over time. In the literature review, the algorithms only focus on constructing and optimizing path trajectories for robots based on different algorithms. Combining path planning with control schemes is often neglected.
In particular, for the MWMRs, a type of wheel that is quite complicated to control. Many algorithms have been applied to control mobile mecanum wheel robots from classic to modern, such as proportional–integral–derivative (PID),14–16 neural network,17–19 fuzzy,20–22 and so on. Huang et al. 23 propose an innovative control strategy for omnidirectional mobile robots. The authors integrate a metaheuristic-optimized fuzzy neural network with a self-tuning autonomous control mechanism to enhance the robots’ adaptability and performance in dynamic environments. Zijie et al. 24 propose a fuzzy proportional-integral control algorithm to enhance the course accuracy of omnidirectional mobile robots. The algorithm dynamically adjusts the robot's course in real-time by analyzing its omnidirectional movement characteristics. Sun et al. 25 propose a novel control strategy for trajectory tracking in MWMR used in agricultural settings. The authors develop a kinematic and dynamic model with four control inputs and three states, and design a fuzzy adaptive recursive terminal sliding mode controller to enhance tracking accuracy and control smoothness. There are also other optimized controllers,26–29 such as PID controller optimized using neural networks, 30 fuzzy-PID controller optimized by a genetic algorithm (GA). 31 It can be seen that using different algorithms to optimize parameters for the controller yields many good results and fast processing times in simulation and experimental environments. This is also a method used by many researchers to control a system with many uncertain factors, such as mobile robots.
The goal of applying the combination of the RT-RRT* and the genetic algorithm with type-2 fuzzy logic controller (GA-T2FLC) is to help the robot move from the initial position to the target in the obstructed space with high accuracy. The RT-RRT* makes it possible for the robot to create the optimal trajectory in the map with factors such as the size and location of obstacles known in advance. The MWMR is used to take advantage of the ability to move flexibly and accurately according to complex trajectories. From there, it can meet most diverse trajectories created by RT-RRT*. Compared to the existing works, the proposed approach has several contributions as follows:
The path planning of the MWMR in dynamic environments is developed by RT-RRT*. Instead of employing purely random space exploration, the RT-RRT* algorithm performs an informed exploration of the search space. It makes use of the first path found by RT-RRT* as an intelligent guess and uses intelligent sampling to give an optimum or near-optimum path at a very fast rate of convergence and reduced execution time. The genetic algorithm with interval type 2 fuzzy logic controller (GA-IT2FLC) is responsible for giving control signals to MWMR following a defined trajectory. The pre-treatment coefficients before feeding the feedback signal into IT2FLC are optimized based on a GA. The proposed method has better tracking performance compared to the genetic algorithm with type-1 fuzzy logic controller (GA-T1FLC) and PID controller.
MWMR kinematic analysis and dynamic modeling
Kinematic analysis
The MWMR employed in this study adopts a wheel arrangement as illustrated in Figure 1.
32
In this configuration, the robot's origin and the positive direction are indicated in the diagram. The orientation of the rollers from Wheel 1 to Wheel 4 is arranged sequentially at angles of

Potential configuration of Mecanum wheels.
In Figure 2, the kinematic analysis is displayed, where

Kinematic analysis of the Mecanum-wheeled mobile robot (MWMR).
The linear movement of the MWMR is

For rotational movement,

From equations (1) and (2), we can summarize the equation as follows:

Equation (3) can be written in matrix form as follows:


Matrix D in equation (5) must be changed using the pseudo-inverse method in order to solve this equation, where
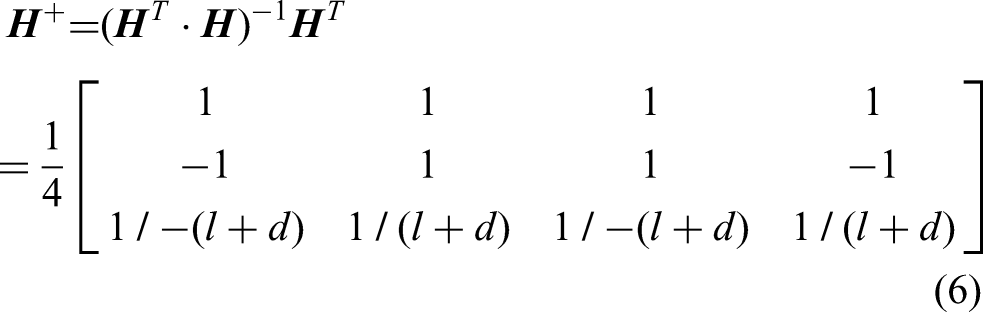
Rearranging equation (6), the forward kinematic equation can be obtained as follows:

Table 1 provides a summary of the movement's direction with regard to the wheel's rotation, with “+” denoting clockwise and counterclockwise rotation, respectively. The number “0” indicates that only the free rollers are turning, and the wheel is still halted.
Combination of wheels rotation in producing Mecanum-wheeled mobile robot (MWMR) motions.

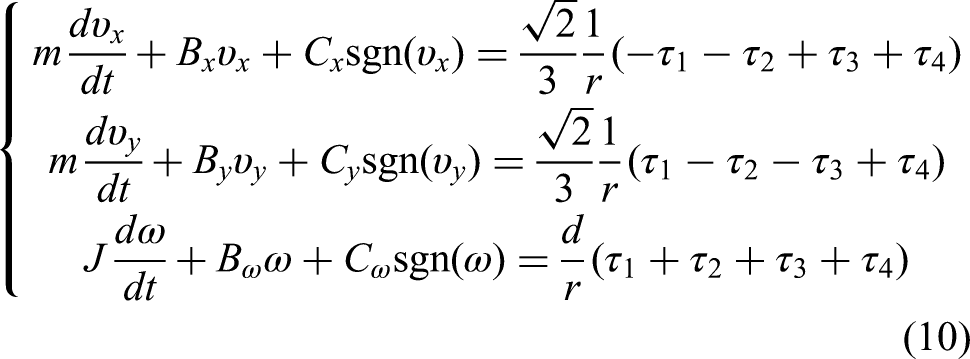
Dynamic modeling
Newton's method states that dynamic equations take into account the effects of both Coulomb and viscous friction as follows:
Using the coordinate axis system that was chosen, as illustrated in Figure 2, we have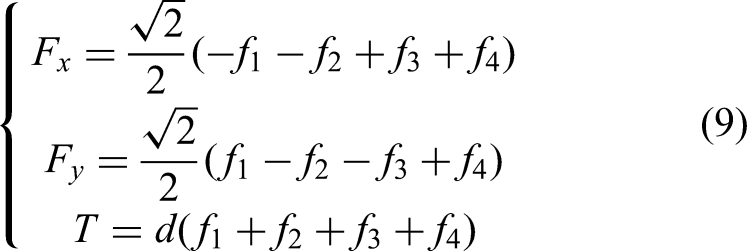


RT-RRT* algorithm for dynamic environments
The RT-RRT* 34 is a real-time path planning algorithm, improved based on RRT and Informed RRT. As such, RT-RRT* combines the advantages of RRT* in optimal pathfinding with the fast computation time of informed RRT*. The proposed algorithm is capable of performing calculations while the root of the tree may change, without discarding previously sampled paths. In other words, the tree structure is preserved without the need to resample from scratch. The interleaved restructuring of the tree significantly reduces computation time. As a result, the algorithm can respond quickly to environmental changes while maintaining the ability to find an optimal path. The implementation method of the RT-RRT* algorithm is illustrated in Figure 3.

Diagram of the operation process of the real-time rapidly exploring random tree* (RT-RRT*) algorithm.
The proposed method is shown in Algorithm 1. The algorithm presents a detection method that intersperses tree expansion and node connection. The root of the tree is defined with

The tree grows so big (but with fewer nodes) when

(a) Consider only the influence of dynamic obstructions within
Adaptive type 2 fuzzy logic controller
Type 2 fuzzy logic controller
An IT2FLC is designed and improved based on the T1FLC. 35 The principle diagram of IT2FLC 36 can be seen in Figure 5. In which some of the components of IT2FLC are similar to T1FLC. The difference is the type-reducer 37 to convert a type 2 fuzzy set (T2FS) to a type 1 fuzzy set (T1FS).

Block diagram describing a type 2 fuzzy logic set (T2FLS).
For T1FLC, T1FS X is the equation that represents the relationship between the real domain 
It can be seen that the members of T1FS's are clear values. Therefore, many studies indicate that although T1FS helps T1FLC to handle uncertainties, it is still limited in some cases [aaa]. The T2FS is made up of blurring the members of the MF.
A T2FS 
Figure 6 shows an example of T2FS,

A sample of an interval type 2 fuzzy set (IT2FS).
The calculation of IT2FLC adopts a system based on the experience of the operator. Suppose IT2FLC's law system includes K law. The general system is given as follows: Step 1: The input of the controller is the vector Step 2: Calculating the fuzzy space of the second law Step 3: Type-reducer, 
where

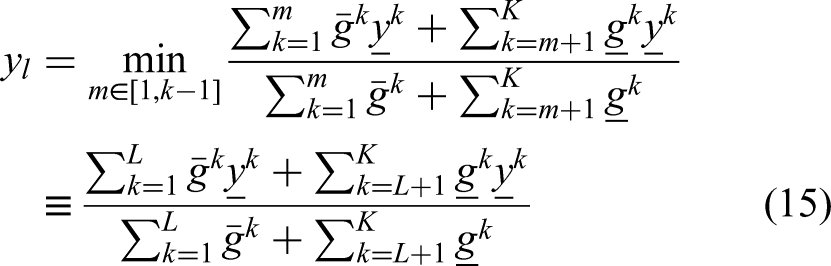
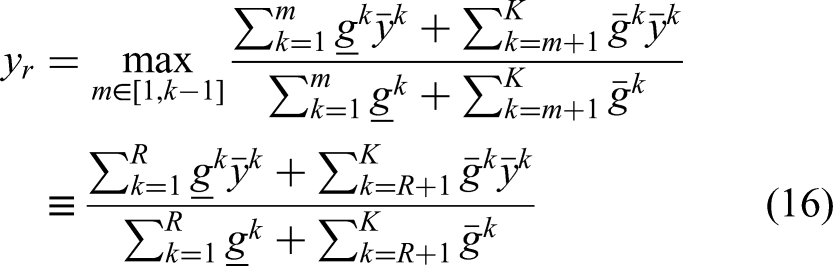
where L and R are defined by the following equation: Step 4: The defuzzification process is done by equation (18), which obtains a crisp output value.

The mobile robot was modeled with a Takagi-Sugeno fuzzy controller. The linear and the angular velocity errors are taken as input variables, and the right and left torques as the outputs. The membership functions used in the input are trapezoidal for the negative (N) and positive (P), and triangular for the zero (Z) linguistic terms. Table 2 shows the set of used fuzzy rules.
Direction of the Mecanum-wheeled mobile robot.

N: negative; P: positive; Z: zero.
The set of membership functions used in the inputs by the T1FLC is shown in Figures 6 and 7, for
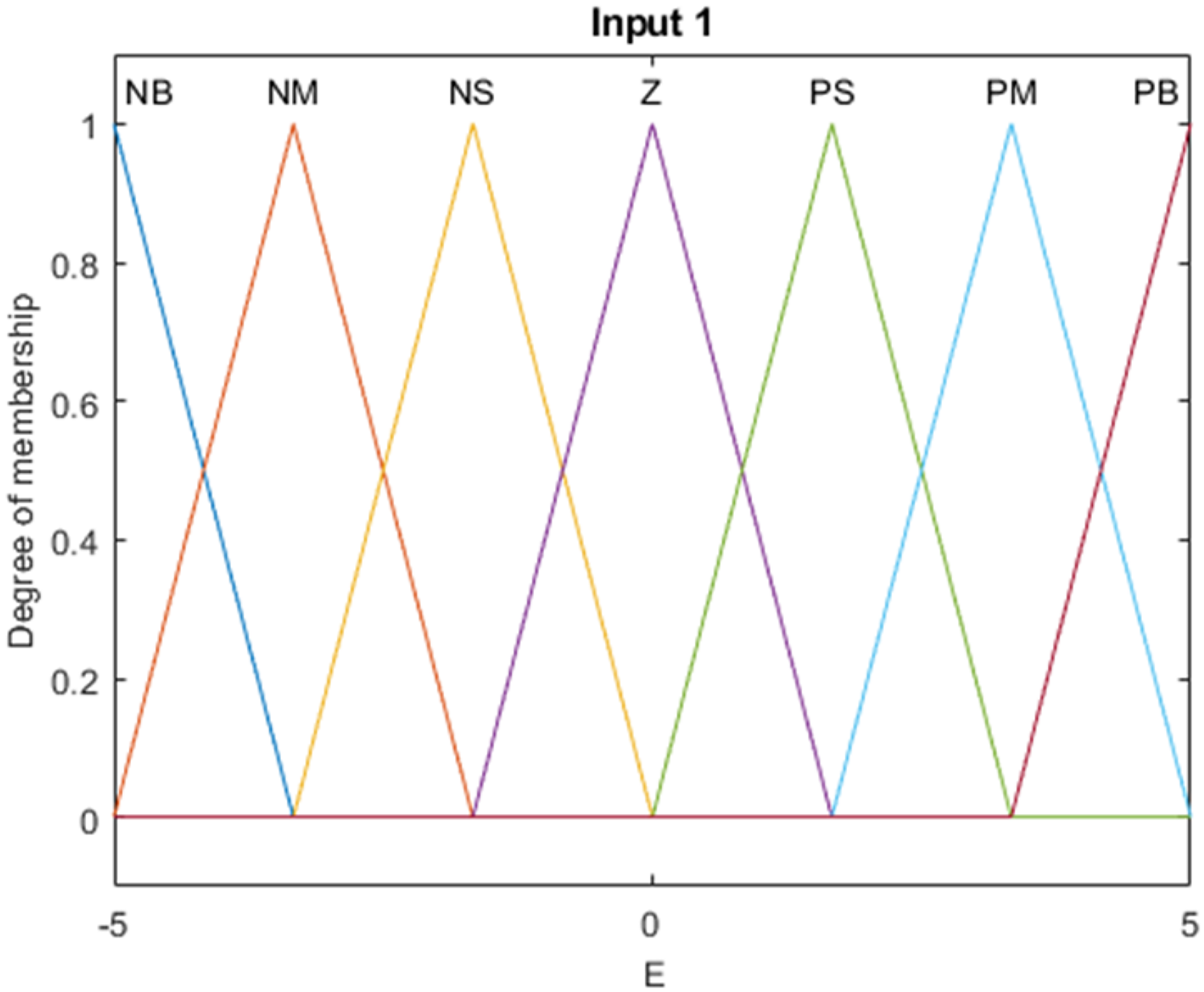
Membership function distribution for the
The set of membership functions used on the inputs by the IIT2FLC is shown in Figures 8 and 9, for

Membership function distribution for

Membership function distribution for
Finally, the set of membership functions used on the inputs of the IT2FLC is shown in Figures 10 and 11 where only one representative set of membership functions is used for both

Membership function distribution for

(a) T1FLS control surface and (b) T2FLS control surface.
GA-type 2 fuzzy logic controller
In this study, the author uses a GA to calibrate the pretreatment coefficient for the IT2FLC controller, the control system block diagram shown in Figure 12.

Block diagram of an interval type 2 fuzzy logic controller (IT2FLC) optimal control system for a mobile robot.
As analyzed in the “Mecanum wheels mobile robot kinematic analysis and dynamic modeling” section, each corresponding wheel will have an IT2FLC. The input of each IT2FLC is the velocity error and the velocity error derivative. Figure 13 more clearly shows the pretreatment coefficients of IT2FLC. Corresponding to each input, there will be a pretreatment factor. We have the pretreatment coefficient vector as follows:

Detailed square block diagram for an interval type 2 fuzzy logic controller (IT2FLC) mobile robot controller.
The management of
The GA algorithm
38
will go to find the best values in the 

Algorithmic flowchart of genetic algorithms.
The focus parameters in the GA algorithm are selected:
Maximum number of generations: 200. With this controller, finding eight parameters Number of chromosomes in an individual: eight. Hybridization: 0.8 using multipoint hybridization. Mutation coefficient: 0.2 mutation in an evenly distributed fashion. Decimal type encoding. May end early when 25 consecutive generations are satisfactory.
Results and discussion
Real-time path planning algorithm
The simulated environment is limited to a size of 600 × 600 pixels (Figure 15), where the tree covering the entire space will contain ∼3000 nodes. To calculate the subset of XSI nodes, the environment is divided into 225 squares that are 40 × 40 pixels in size. The maximum number of neighboring nodes in an area is limited to

Real-time rapidly exploring random tree* (RT-RRT*) algorithm simulation map structure.
In simulation of the paper, the immovable obstacles are assumed to have fixed travel trajectories to test the algorithm. However, our algorithm is much more flexible. Obstacles can move in any trajectory, and the algorithm doesn’t need to care about how they move but only focuses on determining their current location. Based on this information, the algorithm will plan and adjust the path to ensure effective obstacle avoidance, even in complex situations. In the random sampling function, the coefficients
Figure 16(a) illustrates that when the tree is growing, one destination is selected and one path is found immediately. Figure 16(b) and (c) illustrates the flexible variation of the target point, where the path is determined quickly. The agent not only moves, but also drags the base of the search tree, and the tree expands to gradually cover the entire environment. In Figure 16(d) to (f), the path is replaced or changed when blocked by a dynamic obstruction. Figure 16(b) to (f) shows the algorithm's superior adaptability in handling dynamic changes, ensuring efficiency in path planning. In Figure (g), the agent has reached the target, and the restructuring of the nodes based on the current position of the stump has produced paths of minimal length to other nodes of the tree.

Real-time rapidly exploring random tree (RT-RRT) algorithm implementation process.
The tree growth graph over time illustrates the rate of expansion and space coverage of the tree during the search (Figures 17 and 18). As time increases, the density of nodes covering the path gradually becomes denser, reflecting the tree's ability to effectively restructure around critical nodes (Figure 19). This improves the optimal level of the path over time, rather than expanding randomly, contributing to a shorter and more efficient journey for the agent.

Real-time rapidly exploring random tree (RT-RRT) tree growth chart over time.

(a) The tree grows up to 380 nodes after 2 s; (b) the tree grows up to 900 nodes after 10 s; and (c) the tree grows up to 1200 nodes after 40 s.

Node cost allocation chart across the entire real-time rapidly exploring random tree* (RT-RRT*).
Trajectory tracking control
The orbital control model of MWMB is shown in Figure 20. In which the trajectory is generated from the RT-RRT algorithm.

The system model was simulated on MATLAB.
As can be seen in Figure 21, the target function has declined sharply after 100 generations of GA. In the 100th generation, the total error target function over time reaches a minimum value of 0.0296. The K matrix after the optimum is

Graph the change trend of a target function over generations.
In this part, the author uses two orbits, a circle and a straight line, to test the performance of the system.
Trajectory 1

Trajectory 2

In both cases, IT2FLC shows better results in the criteria of overshoot and steady-state error. The robot's response in the case of a circular robot trajectory can be seen in Figures 22 to 25. In the absence of impact interference, the error of the system is stable in the range of 0.02 m for the controllers. In which, GA-IT2FLC has the lowest establishment error (< 0.005 m) for both the x and y axes. PID has the largest dynamic star error with an amplitude of 0.023 m. In case of interference impact is a weight with a value of 10 N. As can be seen in Figures 24 and 25, the response of the controllers has a larger amplitude of oscillation and cumulative error. However, the deviation of the system is still within the design value. The GA-IT2FLC continues to provide the best responsiveness in controllers with the smallest cumulative error (<0.0025 m).

Trajectory response of PID, T1FLC, and IT2FLC with the original signal.

Compare the error of controllers with the original signal: (a) Error of Y-axis and (b) error of X-axis.

Trajectory response of PID, T1FLC, and IT2FLC with disturbance signal.

Compare errors of controllers with original signal: (a) error of Y-axis and (b) error of X-axis.
The response of the system in the case of trajectories is the straight lines shown in Figures 26 to 29. The GA-IT2FLC continues to exhibit the best performance for error and response time in this case. When there is no interference signal acting on the system, the robot can respond relatively stable on straight sections. However, at times when the orbit is at a right angle, the robot is more unstable than usual.

Trajectory response of PID, T1FLC, and IT2FLC with disturbance signal.

Compare errors of controllers with original signal: (a) error of Y-axis and (b) error of X-axis.

Trajectory response of PID, T1FLC, and IT2FLC with disturbance signal.

Compare the error of controllers with the original signal: (a) error of Y-axis; and (b) error of X-axis.
The case where the robot is subjected to interference is a force with an equation
The results when the robot applies the recommended controller are shown in Figures 30 and 31. The node cost allocation chart (Figure 30) clearly shows the cost values or the length of distance that the agent needs to move from the current position to each node. If the destination chosen is a specific node or the node closest to it, this cost reflects the efficiency of the path. Through the graph, we can identify the distribution and prioritize potential paths, helping to optimize the agent's journey in the search space. Figure 31 shows the robot's response to the trajectory found in Figure 30. It can be seen that the robot can move closely following the trajectory based on the optimal algorithm IT2FLC.

Path is found and smoothed out with real-time rapidly exploring random tree* (RT-RRT*).

The robot is moving along the road with the genetic algorithm with type 2 fuzzy logic controller (GA-IT2FLC).
Conclusions
This article has presented a method of using the IT2FLC and RT-RRT* to control the trajectory of a wheeled mobile robot. The two methods presented for comparison are T1FLC and PID. IT2FLC has shown strong trajectory control ability by showing better results than PID and T1FLC. However, it is possible to improve the control ability of the system when applying algorithms to optimize fuzzification coefficients or preprocessing coefficients.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
No data was used for the research described in the article.