
Abstract
A trajectory tracking design for wheeled mobile robots is presented in this article. The design objective is to develop one nonlinear robust control law for the trajectory tracking problem of wheeled mobile robots in the presence of modeling uncertainties. The main contribution of this investigation is as follows. Under the effects of modeling uncertainties, an effective control design which can quickly converge tracking errors between the controlled wheeled mobile robot and the desired trajectory is derived mathematically. Generally, it is difficult to develop a nonlinear robust control design for the trajectory tracking problem of wheeled mobile robots due to the complexity and nonlinearity of the wheeled mobile robots’ dynamics. Fortunately, based on a series analysis for the tracking error dynamics of the controlled wheeled mobile robot, one promising solution is obtained. For verifying the trajectory tracking performance of this proposed method, two scenarios are utilized in the simulations and the practical tests.
Introduction
In the past decades, technological advances and the emergence of the digital era have led to the ubiquitous use of mobile robots in daily life. Most of the mobile robots requiring high-quality motion mechanisms and controllers are applied in various industrial and service fields such as transportation, inspection, and security. Among them, wheeled mobile robots (WMRs) play very important roles in industrial automation and manufacture for transporting, loading, and unloading purposes. Therefore, the precise motion control of WMRs has attracted a great deal of attention from researchers and the robotics industry in recent decades.1–6 From the existing researches, it is easy to find out how to effectively develop a control design for WMRs precisely tracking the desired or predefined trajectories in the presence of modeling uncertainties is still an open challenging question in robotics. A controller with a robustness property is the key for solving this question. Basically, the trajectory tracking design of a WMR must be capable of generating the errors between the actual path of the controlled WMR and the desired path to converge to near zero under the effects of slippage, disturbances, and measurement noises. Generally speaking, this is a very difficult mission for researchers to develop such a control design for WMRs simultaneously possess (1) simple and easy implementation control structure, (2) error convergence, and (3) control performance guarantee design under the effects of internal and external disturbances. By the survey of existing literatures for the trajectory tracking design of WMRs, many investigations without taking the internal and external disturbances into account have been studied, and the developed tracking control methods for this trajectory tracking issue focus on four groups: (1) sliding mode control,7–12 (2) feedback linearization,13,14 (3) backstepping,15–17 and (4) neural networks and fuzzy approaches.18–23 Although these methods worked well without considering the effects of disturbances, there still exist several disadvantages. For example, sliding mode control designs are always with a main drawback of system high-frequency chattering due to switching behavior along a sliding surface, and the feedback linearization-based methods are usually dealing with the trajectory tracking problem of WMRs without taking the internal and external disturbances into consideration. As to control designs realized by backstepping control, neural network control, or fuzzy control, these kinds of methodologies are normally complicated in control structures that are not easily implemented with low-cost microchips due to their high computational consumptions.
Based on these reasons, authors try to propose an advanced nonlinear robust control method which is with an easy implemented structure and can provide a satisfactory trajectory tracking performance for WMRs in the presence of the modeling uncertainties. This proposed nonlinear robust control method achieves almost zero tracking errors under the effects of the modeling uncertainties via integrating a feedback linearization controller and a robust compensator. Feedback linearization of this proposed method is used to rapidly converge the tracking errors between the desired trajectory and the controlled WMR, and then the added robust compensator fine-tunes the controlled WMR to precisely follow the desired trajectory when the controlled WMR catches up the desired trajectory. This article exhibits by the following sequences: the mathematical model and tracking error dynamics of WMRs will be briefly introduced in section “Mathematical model and tracking error dynamics of WMRs,” the problem formulation and the proposed nonlinear robust control design for WMRs’ trajectory tracking problem will be described in section “Problem formulation and nonlinear robust control design,” and robust trajectory tracking performance verifications of the proposed method are demonstrated in section “Simulation results and practical tests.” Finally, conclusions are summarized in the final section.
Mathematical model and tracking error dynamics of WMRs
A brief description of the mathematical model of the controlled WMR will be presented in this section. Based on this governing equation, the error dynamics between the controlled WMR and the desired trajectory will be derived.
Mathematical model of WMRs
The WMR adopted in this investigation has a natural energy saving feature: only two wheels are needed to be driven when the controlled WMR is on duty. Figure 1 shows the typical schematics of the WMR which exhibits two driving wheels with the same radius denoted by r and separated by 2R. The real-time location of the WMR in the global coordinate frame {O, X, Y} is represented by the vector q which contains the coordinates of the point C in the global coordinate frame and the orientation θ of the local frame {C, Xc, Yc}. Distance between points q and C is denoted by d. By the above definitions, the generalized coordinate of the WMR can be described as


Schematics of the controlled WMR.
For an ordinary WMR, the robot just can move as the direction of the axis of the driving wheels with pure rolling and nonslipping condition status. Consequently, the velocity of contact point with respect to the ground and to the plane of the wheel is zero hence we have

and then the kinematic equation for the WMRs under the constraint can be described as

where
The above kinematics for WMRs is usually called as the steering system of WMRs and is used to infer the dynamics of WMRs. In this study, the dynamic equation of WMRs can be derived as

where
However, modeling perturbations due to the variation of the controlled WMR’s mass m randomly changed when the controlled WMR loads or unloads cargos in a production line. Therefore, the parameter matrices of the WMR model can be divided into nominal parts (


Using equations (5) and (6), the dynamic equation (4) can be rewritten as

where

and

Description of tracking error dynamics
The desired tracking trajectory

and the tracking error dynamic equation can be derived as

where
By choosing the nonlinear control law

where
Then, substituting equation (12) into equation (11), equation (11) becomes

where

Re-expressing equation (13) as the following state-space form

where

and
Problem formulation and nonlinear robust control design
Problem formulation
Based on the above arrangements, the design objective of the trajectory tracking design of the controlled WMR becomes to determine the robust compensator

or

for all
Nonlinear robust control design
After some mathematical manipulations, the following theorem can be obtained for trajectory tracking problem of the controlled WMR in the presence of modeling uncertainties.
Theorem 1
For the disturbed WMR in equation (7), the minimax control performance in equation (15) or equation (16) can be guaranteed for a prescribed attenuation level

with

The corresponding worst-case modeling uncertainties W is of the form

Proof of Theorem 1 is given in Appendix 1.
Summary of the design procedures
Step 1. Select the weight matrices Q, the desired attenuation level
Step 2. Specify A with design eigenvalues
Step 3. Solve the Riccati-likeequation (18) for P.
Step 4. Obtain the robust compensator
Simulation results and practical tests
In this section, the trajectory tracking performance of the proposed method for two scenarios will be discussed and verified using the famous MATLAB software. This proposed method is further implemented to a real WMR in our laboratory for the practical verification.
Set up of the simulation environment
For being close to the situations in real applications, several main physical parameters, such as I = 5 kg m2, m = 5 kg, d = 7 cm, R = 8.9 cm, and r = 3.25 cm, measured from the implemented WMR in our laboratory are used. Based on these parameters, there are two scenarios: (1) straight-line trajectory and (2) circular trajectory adopted to verify the trajectory tracking performance of the proposed robust control method. Mathematical expressions of these two scenarios are described as follows:
Scenario 1. One straight line with the following equation is selected for the trajectory tracking verification of the proposed method.
Straight-line trajectory

Scenario 2. One circular trajectory for the simulation and practical test of the proposed method expressed as below is used.
Circular trajectory

where
Using the robust control design procedure in “Summary of the design procedures” step by step, the nonlinear robust controller
Step 1. Select the weighting matrices Q and R to guarantee the solvability of the minimax trajectory tracking problem

Step 2. Specify eigenvalues of the matrix A

Step 3. Solve the Riccati-likeequation (18) by choosing

Step 4. The robust compensator
Simulation results
The controlled WMR is controlled to track a straight-line trajectory (DCT) with a length of 30 m along the X-axis. Figure 2 shows the trajectory tracking history of the controlled WMR, and error histories are exhibited in Figure 3. From these two simulation results, a rapid error convergent property can be obtained initially, and tracking errors are always maintained within 0.5 cm after 3 s under the effect of a 20% random modeling uncertainty of the system mass m. Figure 4 reveals the control torques τr and τl.
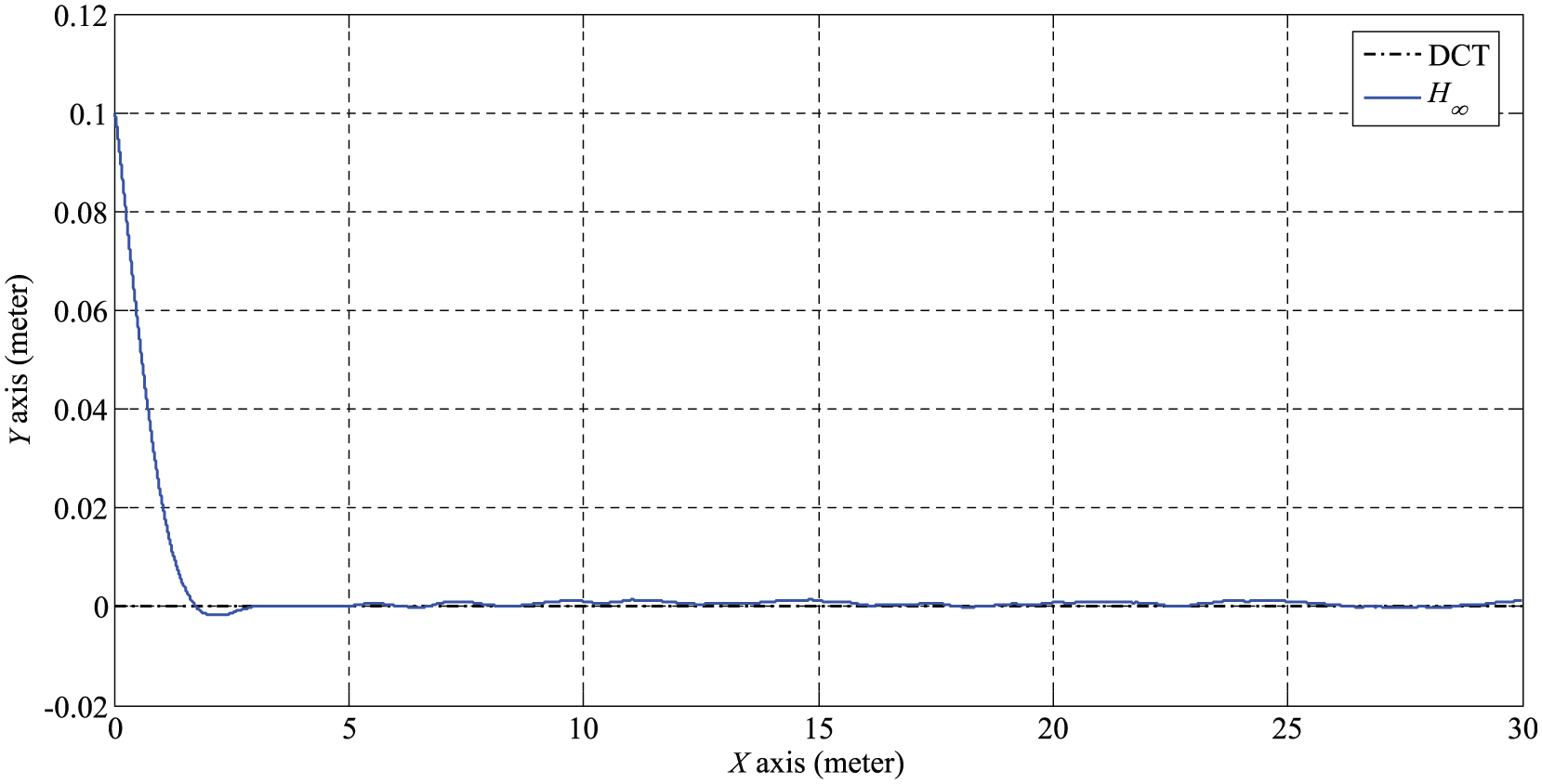
Trajectory tracking history of the proposed robust control method: H∞ (blue line) and the desired circular trajectory: DCT (black dash line) for Scenario 1.

Histories of trajectory tracking errors ex and ey of the controlled WMR in X- and Y-axes, respectively for Scenario 1.
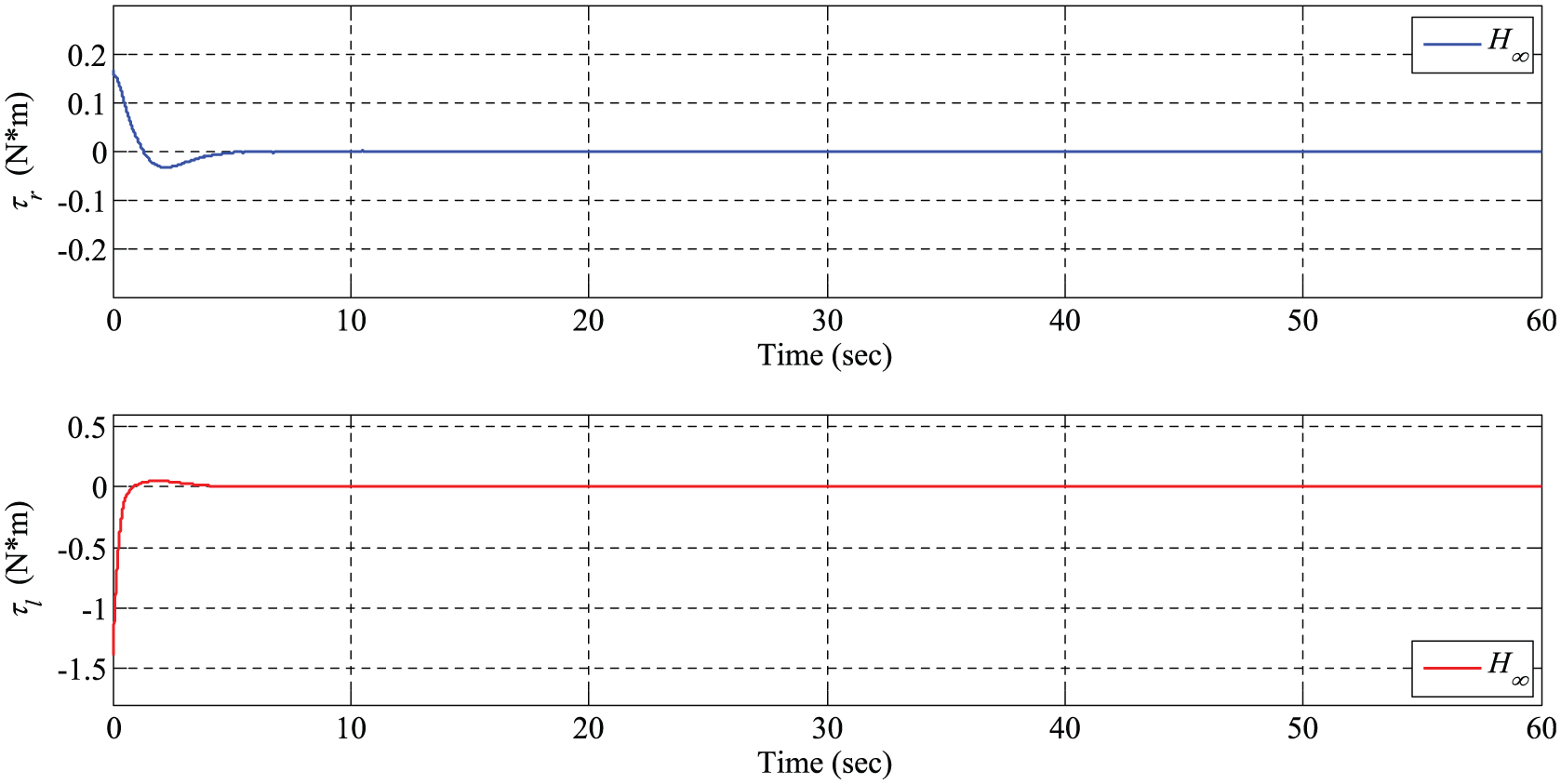
Control torques of applying in the right and left wheels for Scenario 1.
In Scenario 2, the controlled WMR is robustly driven to follow a circular trajectory (DCT) with a radius of 1.5 m under the effect of a 20% random modeling uncertainty of the system mass m. Random and bounded modeling uncertainties to the controlled WMR in X-, Y-, and θ-directions are shown in Figure 5, respectively.
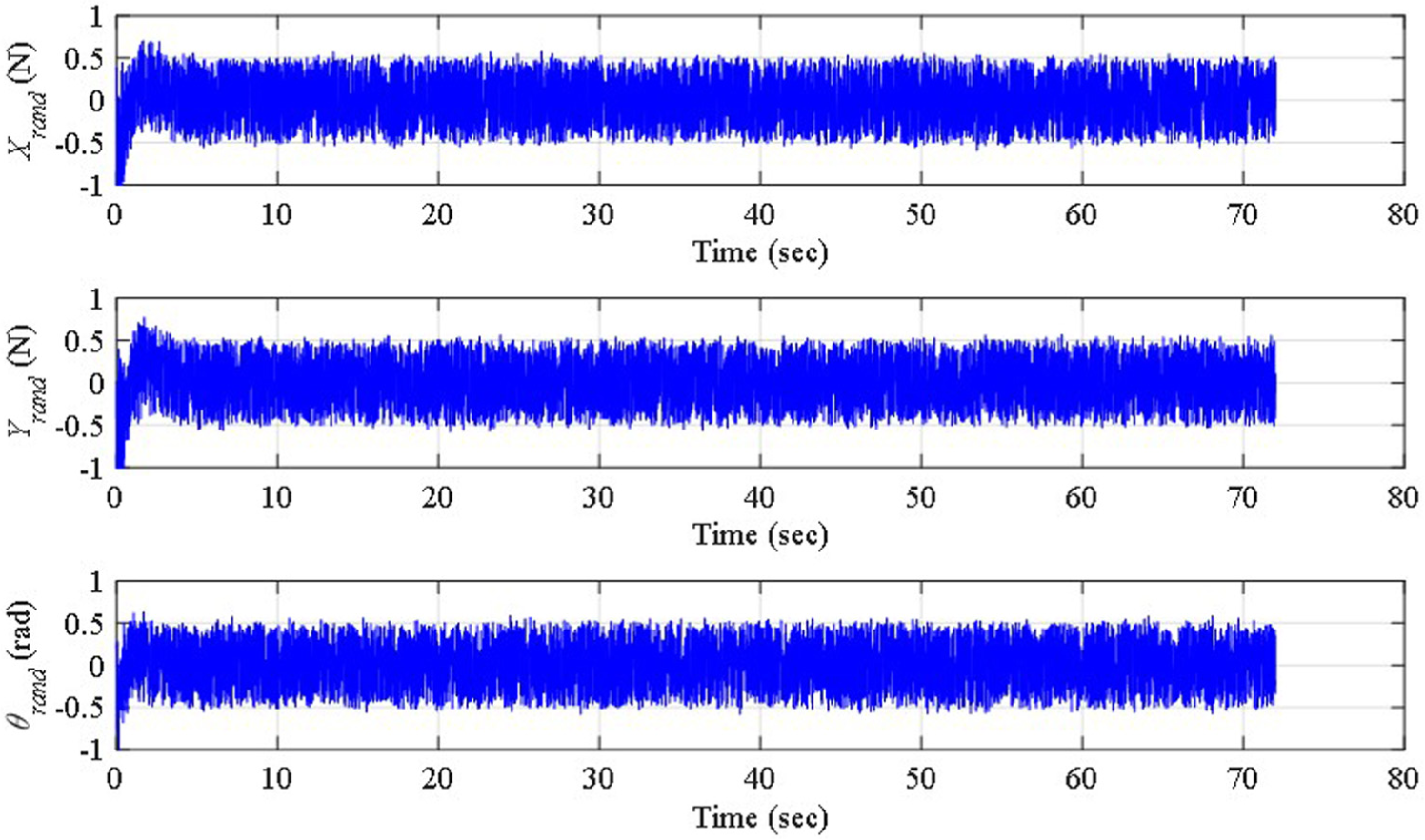
Profiles of bounded modeling uncertainties in X, Y, and θ.
Figures 6–9 marked by “H∞” are the trajectory tracking results of the controlled WMR driven by the proposed robust control method for Scenario 2.

Trajectory tracking history of the proposed robust control method: H∞ (blue line) and the desired circular trajectory: DCT (black dash line) for Scenario 2.
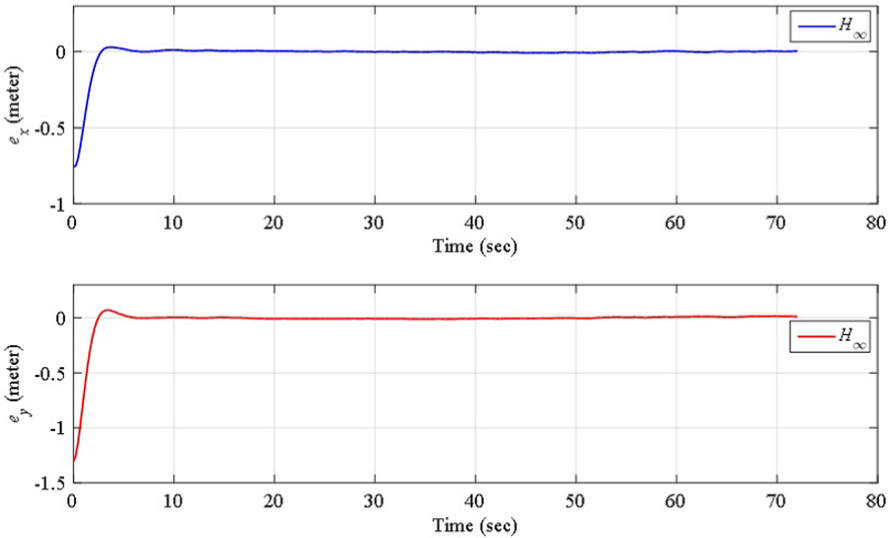
Histories of trajectory tracking errors ex and ey of the controlled WMR in X- and Y-axes, respectively for Scenario 2.

History of the angle error eθ of the controlled WMR.
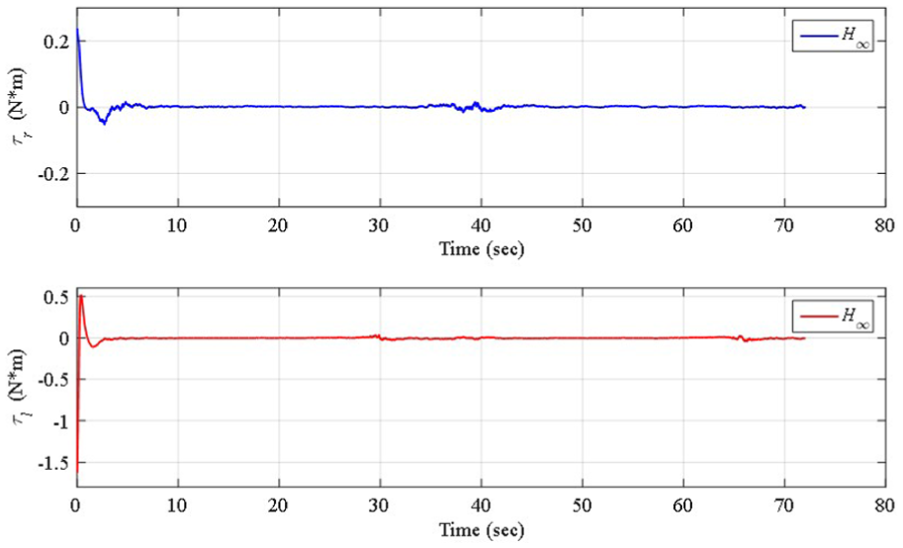
Control torques of applying in the right and left wheels for Scenario 2.
From Figure 6, it reveals that the controlled WMR quickly tracks the DCT from the initial point (x, y) = (0 m, 0 m) and precisely follows the DCT from the point (x, y) = (1.3 m, 0.6 m). From the histories of tracking errors ex, ey, and eθ in Figures 7 and 8, all tracking errors asymptotically converge to near zero values about 5 s.
Control torques applied to roll the right and left wheels of the controlled WMR are shown in Figure 9, respectively.
Obviously, larger control torques are used to accelerate the moving velocity of the controlled WMR for rapidly reducing the tracking errors ex and ey, eθ in the first 5 s, and slight control torques are used to fine-tune the instantaneous trajectory of the controlled WMR for letting it can precisely follow the instantaneously position (xr and yr) and heading angle (θr) of the DCT.
Practical implementation of the proposed method in WMRs
For assessing the possibility of practical implementation of this proposed robust method, a WMR with two driving wheels and one passive self-adjusted support wheel is built up practically as Figure 10.

Real implementation of the controlled WMR.
The small passive self-adjusted support wheel is attached in the back of the controlled WMR to carry the framework. The drivable wheels are rolled by two individual DC motors. In this study, communication between the desktop and the controlled WMR is performed with a Bluetooth radio frequency (RF) module including a pair of transmitter and receiver. A main board with a type of microchip, dsPIC 30F4011, is adopted for the control purpose. The proposed robust control algorithm and a viewable trajectory interface are programmed by a series of software tools as MPLAB IDE, C30 C compiler, and WinPIC tool.
Practical tests
In this section, the real trajectory tracking performance of the proposed robust control method will be verified practically with the above real implemented WMR. In this experiment, a circular trajectory is used as the desired tracking pattern, and the radius of this circular trajectory pattern is preset up as 1 m by the programming software in the desktop. This circular trajectory pattern is wirelessly sent to the controlled WMR by the Bluetooth RF module. A well-designed inertial navigation system (INS) is used to measure the movement messages (position, velocity, and heading angle) of the controlled WMR. The proposed robust controller is programmed in microchip, dsPIC 30F4011.
Initially, the circular trajectory pattern is sent with the Bluetooth RF module from a viewable interface in the desktop. When the proposed robust controller receives this desired trajectory pattern, it will automatically guide the controlled WMR to track this desired trajectory pattern until the trajectory tracking mission completed. Figure 11 shows the trajectory tracking result of a controlled WMR guided by our proposed method. From this testing result, it is obvious that the proposed robust method yields a satisfactory performance for precisely tracking a DCT.
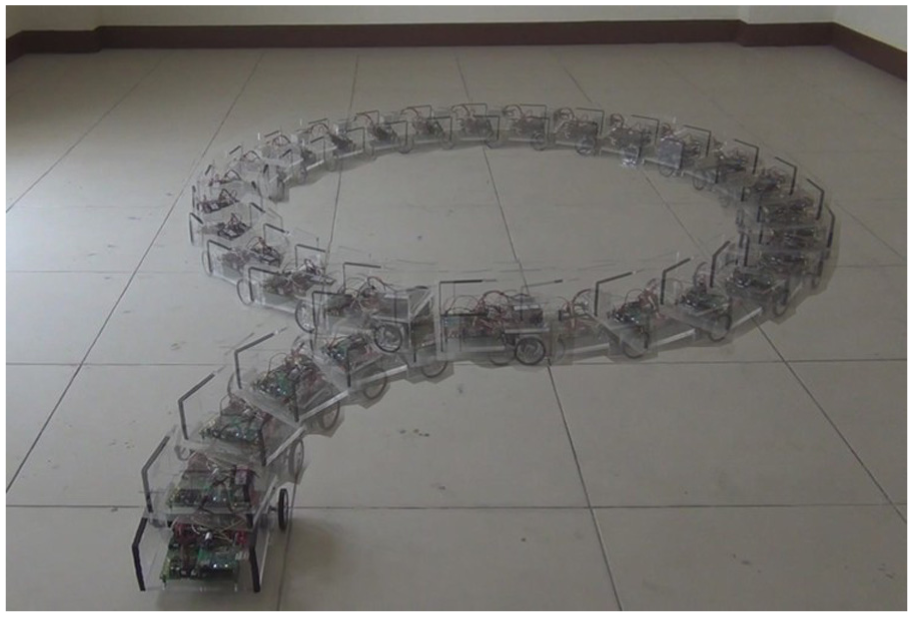
Real-time trajectory tracking performance verification of the controlled WMR by tracking a predefined circular trajectory with a radius of 1 m.
For checking the robustness property of this proposed robust control method with respect to the modeling uncertainties in practical transporting situation of the production line, a 500 g weight as shown in Figure 12 is attached to the controlled WMR as an added mass Δm. Based on this modeling uncertainty setting, a practical test with the same circular trajectory pattern of the previous test runs again to verify the robustness performance of the proposed robust control method. From the testing result, an exciting achievement can be found in Figure 13. The proposed robust control method obviously offers satisfactory trajectory tracking performance in the presence of 10% modeling uncertainty (Δm = 500 g).

The controlled WMR with an added weight (Δm = 500 g).

Real-time robust trajectory tracking performance verification of the controlled WMR for a predefined circular trajectory under the effect of a modeling uncertainty (an added mass Δm: 500 g).
Conclusion
A lot of existing achievements with suboptimal trajectory tracking performances, conservation properties and really complicated control structures based on the sliding mode control, the backstepping control, and fuzzy and neural networks methodologies for the trajectory tracking problem of WMRs are proposed. However, most of these trajectory tracking designs did not take the modeling uncertainties into the consideration. For dealing with these ameliorable control characters, a nonlinear robust control design is successfully developed for the purposes of highly improving the trajectory tracking ability and eliminating the effect of modeling uncertainties. From the simulation results and practical tests, this proposed method achieves really promising trajectory tracking performance for WMRs due to all tracking errors converge to near zero values rapidly even under the effect of modeling uncertainties; hence, we can conclude that this proposed method possesses some significant advantages when the controlled WMRs execute trajectory tracking missions such as inspection, regular patrol, and transportation.
Footnotes
Appendix 1
Handling Editor: James Barufaldi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by National Science Council, Taiwan, R.O.C. (Grant No. NSC101-2221-E-006-45-MY3).