
Abstract
This article is devoted to the design of robust position-tracking controllers for a perturbed wheeled mobile robot. We address the final objective of pose-regulation in a predefined time, which means that the robot position and orientation must reach desired final values simultaneously in a user-defined time. To do so, we propose the robust tracking of adequate trajectories for position coordinates, enforcing that the robot’s heading evolves tangent to the position trajectory and consequently the robot reaches a desired orientation. The robust tracking is achieved by a proportional–integral action or by a super-twisting sliding mode control. The main contribution of this article is a kinematic control approach for pose-regulation of wheeled mobile robots in which the orientation angle is not directly controlled in the closed-loop, which simplifies the structure of the control system with respect to existing approaches. An offline trajectory planning method based on parabolic and cubic curves is proposed and integrated with robust controllers to achieve good accuracy in the final values of position and orientation. The novelty in the trajectory planning is the generation of a set of candidate trajectories and the selection of one of them that favors the correction of the robot’s final orientation. Realistic simulations and experiments using a real robot show the good performance of the proposed scheme even in the presence of strong disturbances.
Introduction
Wheeled mobile robots (WMRs) have allowed the attainment of a wide variety of tasks in unstructured environments. However, the control of WMRs is still an appealing research topic due to their wide application and the theoretical challenge that represents the nonholonomic constraint, which implies that it is not possible to stabilize an isolated equilibrium point with a smooth state-feedback controller. 1 In this article, we present a method for local navigation to move a WMR between two different poses, focusing on the task to reach the final pose with good accuracy. Among the applications of such task, we can mention inspection robots that require to look at some specific views or mobile robot arms that aim for grasping an object.
The control of WMRs has been typically addressed in two fashions, as pure kinematic control 2 –4 or as combination of kinematic and dynamic control in cascade. 5 –7 The kinematic control is more general since it is valid for any WMR with the same kinematic structure without the need of knowing specific parameters. 2,8 The typical problems addressed in the field of WMRs control are regulation (stabilization) and reference tracking. These problems are close in essence and they have been treated in a unified form in several works. 4,5,8,9
Kinematic control is an effective option to establish stability properties to the enunciated problems for WMRs. In this context, to name few, a global result has been designed such that the controller with saturation constraints simultaneously solved both the tracking and regulation problems of a unicycle-modeled mobile robot. 10 The exponential stabilization of WMRs using a smooth closed-loop time-invariant control law has been exploited in a visual servo control scheme. 11 Kinematic model-based predictive control has been used for trajectory tracking of WMRs taken advantage of an explicit solution of the optimization criteria, 3 which reduces its computational cost. A smooth time-varying kinematic controller capable of converting between stabilizer and tracker rather than switching between two controllers has been proposed. 8
In addition, the control problems in WMRs are more challenging under the presence of input disturbances, 12 unknown parameters, 13 or unmodeled dynamics, 7 such that the design of robust controllers to achieve good accuracy in trajectory tracking or regulation tasks is fundamental. In this vein, the trajectory tracking problem has been addressed by combining kinematic and dynamic control. For instance, a cascade control system has been formulated, 13 where an inverse dynamic controller receives the signals of a robust kinematic controller based on sliding mode theory. Robust control schemes have been proposed using a disturbance observer 6 or a state observer 14 for WMRs. The port-Hamiltonian theory has been used to derive smooth time-invariant control laws for stabilization of robots subject to nonholonomic constraints and external disturbances. 15 Robust controllers have been synthesized in the backstepping approach using the Lyapunov redesign technique 16 and in the iterative learning approach. 17 A typical technique to provide robustness to the trajectory tracking task of WMRs with parametric uncertainty and unmodeled dynamics has been the adaptive approach. 7
However, for real applications and under the presence of input disturbances and uncertainties, the most reasonable methodology to design controllers free of dynamic models is assumed to be a perturbed kinematic model. 4,12,18 In this line, a first approach to reject constant matched input disturbances in a kinematic model consists in a controller composed of a nontrivial cascade integrator and an observer based quasi-continuous feedback. 19 A variable structure-like tracking controller guarantees exponential convergence of the position and orientation errors to a neighborhood of zero. 9 Classical sliding mode control has also been used to reject additive input disturbances in a kinematic controller. 12 Another kinematic controller applied for obstacle avoidance considers additive inputs disturbances and the solution is based on the supervisory control framework. 18 An interesting formulation on kinematic modeling of WMRs including perturbations due to the vehicle skidding and slipping has been developed in a perspective of control design. 20 Recently, two kinematic controllers have been proposed for target enclosing and trajectory tracking, respectively, where both problems are solved with full rejection of disturbances in both linear and angular velocities. 4
Path/trajectory planning is a fundamental and necessary element in navigation systems and might be an important complement of a control scheme for WMRs. A forerunner work in this topic presents a planning method for steering systems with nonholonomic constraints between arbitrary configurations using sinusoids. 21 A steering control of mobile robots around preplanned paths with simple linear control laws has been developed to constrain the demand of the steering controller taken into account the curvature of the preplanned paths. 22 An interesting strategy that combines motion planning and control has been proposed for autonomous navigation of WMR to deal with obstacles. 23 Typically, in trajectory planning, the trajectories are generated using cubic polynomials, in particular Bezier curves, but lower grade curves like parabolic trajectories have not been usually considered. 24 Bezier curves are specified in terms of control points 25 that must be subject to optimization under a cost function. 26 We believe that a simpler formulation to generate cubic and parabolic curves can facilitate the trajectory planning for some tasks of WMRs.
We have noticed that many previous works in the literature about regulation and/or tracking of WMRs take into account some kind of input disturbances in the velocity channels. However, most of the analyzed control schemes have a complex structure, since they are designed to achieve convergence to a desired position and also to a desired value for the orientation coordinate in the same control loop. Hence, in this article, we give a solution to the pose-regulation problem of WMRs in a desired time, which means that the robot’s position and orientation must reach desired values simultaneously in a user-defined time. Besides, we assume that the kinematic model is subject to matched bounded disturbances in the velocity channels. This problem is solved by formulating a robust kinematic tracking scheme that can rely on proportional–integral action or on second-order sliding-mode control. No observer or complex methods are needed to estimate and reject the disturbances unlike other works. 6,7,14
The main contribution of the article is a kinematic control approach for pose-regulation of WMRs in which the orientation angle is not directly controlled in the closed-loop, which simplifies the structure of the control system with respect to existing approaches. However, orientation correction is achieved by tracking adequate reference trajectories only for the position coordinates. Thus, no trajectory tracking is carried out for the robot’s orientation unlike other works, 4,8,12,13 but since the robot’s heading evolves tangent to the position trajectory, then the orientation reaches a desired value at the end of the trajectory. A dedicated offline trajectory planning method based on parabolic and cubic curves is proposed and integrated with robust controllers to achieve good accuracy in the final values of position and orientation with respect to desired values. The novelty in the trajectory planning is the generation of a set of candidate trajectories and the selection of one of them that favors the correction of the robot’s final orientation, since the generation of a single trajectory constrained to the initial and final robot poses does not always ensure to have the best trajectory that suits the final orientation correction. The stability analysis of the closed-loop system is theoretically proved. The complete robust approach is evaluated and compared to existing methods through realistic simulations. Also experiments with a real robot are reported, even introducing an external temporal disturbance.
The remaining of the article is organized as follows. “Modeling and problem formulation” section presents the mathematical modeling and problem statement. “Robust trajectory tracking control” section describes the synthesis of both controllers and presents their stability properties. The trajectory planning stage is detailed in section “Desired trajectories definition.”. Simulation and experimental results are shown in section “Evaluation of the method,” and the final section gives the conclusions and future work.
Notation:
Modeling and problem formulation
In this article, we address the problem of robust pose-regulation of a differential-drive robot in a desired time, that is, take the robot position and orientation to desired values with respect to a fixed reference frame in a desired time. The kinematic model of a differential-drive robot is given by

where
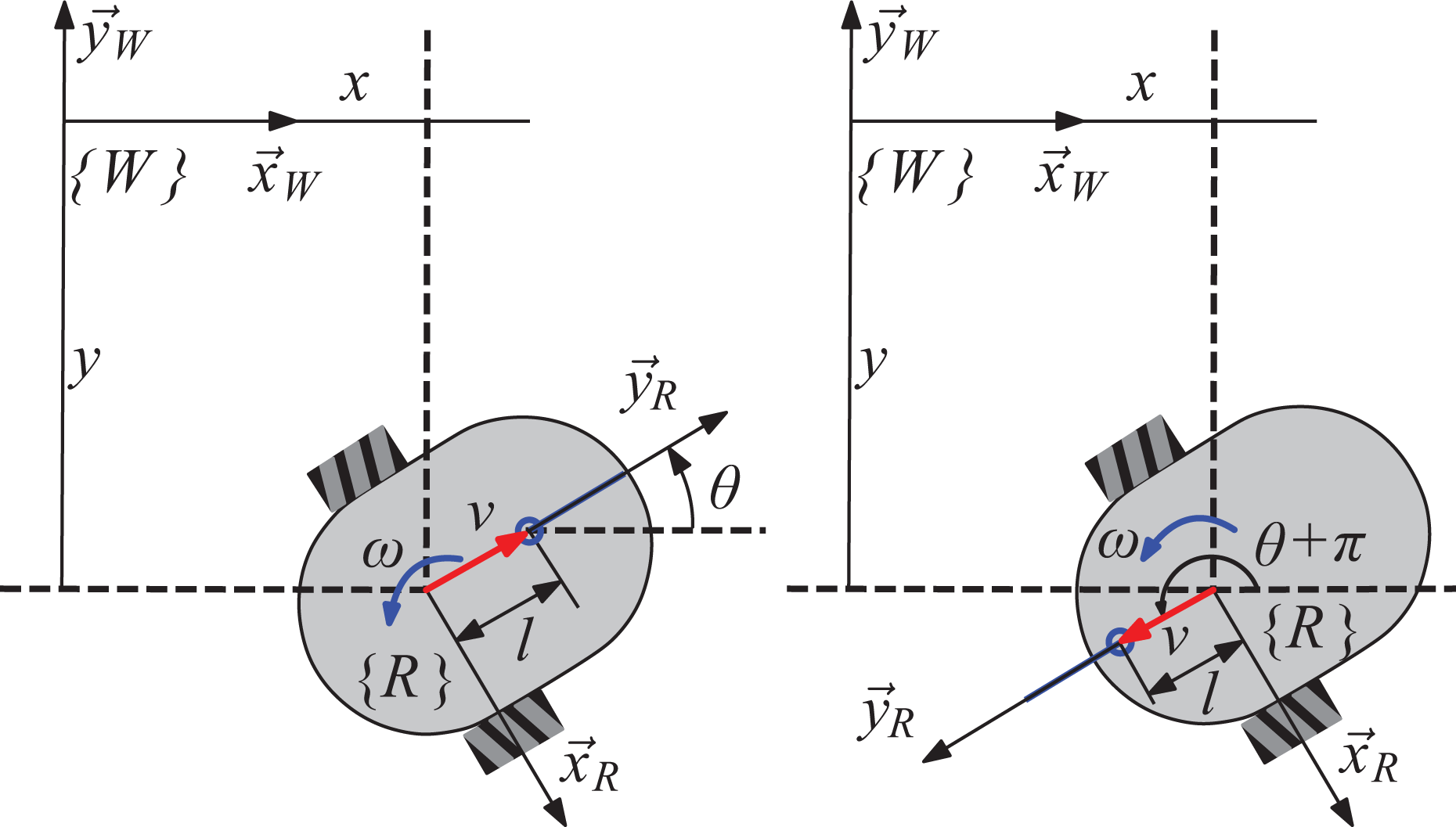
Kinematic configuration of the robot with a virtual control point at a distance l from the robot’s reference frame. Left: Forward motion model. Right: Backward motion model.
A transformed kinematic model
In this section, we modify the system (1) via the addition of a virtual point at a distance l along the longitudinal axis of the robot (see Figure 1). Hence, the well-defined change of coordinates
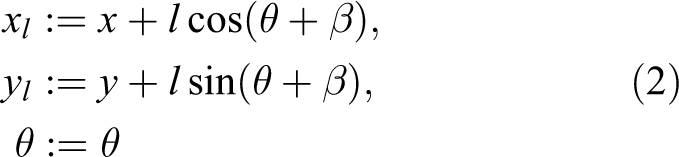
with l > 0 and constant, transforms (1) into

For the controller design and to simplify the notation, we partition and recalled the coordinates as

such that the modified model (3) can be written as

with full rank matrix

Problem formulation
Consider the perturbed kinematic model (1), transformed to system (4) by the change of coordinates (2). The robust pose-regulation problem in a desired time can be enunciated as follows.
Definition 2.1
Problem statement. Regulate
In order to deal with the time-constraint imposed by τ, we propose to address the regulation problem as a trajectory tracking problem for adequate references of the position coordinates xl and yl. We will show that by tracking some particular trajectories, the orientation θ can also reach a desired value since the robot’s heading evolves tangent to the trajectory of position. By assuming that
Robust trajectory tracking control
In this section, we present a main result of the article, specifically two feasible controllers are described to achieve trajectory tracking on coordinates related to the Cartesian position of the robot.
Definition 3.1
Control objective. Let us define a vector of tracking errors as

with
In order to reach the origin of ℝ2 in the time τ as robot’s final position, we assume in the sequel that
A first controller that achieves the previous control objective makes use of the well-known addition of integral action on actuated coordinates
27
in order to reject the disturbance
Proposition 3.2
Consider the time derivative of (6) and (4) in closed-loop with the controller

with positive free gains
1. The closed-loop takes the form

with total energy function

where
2. The closed-loop system has a globally asymptotically stable equilibrium point at the desired point
3. The closed-loop system has a zero dynamics 28 of first order given by

where
Proof
Regarding to point 1, replacing the control law (7) in (4), we obtain the first row of the closed-loop system (8). The second row of (8) corresponds to the definition of the integral part given by (7). On the other hand, taking as Lyapunov function (9) and its time derivative along the system (8) yields

This proves that

This proves that the equilibrium point
Hence, in the case of the system (4) with outputs

Zero dynamics in this control system means that when the variables related to the robot’s position are corrected, the orientation might be different to zero.
Remark 3.3
The addition of integral action on actuated coordinates presented in proposition 3.2 can be equivalent to add an integrator around the passive output for port-Hamiltonian systems, 27 where the task preserves stability in the presence of constant disturbances or modeling errors.
The following proposition presents a second option of robust controller to achieve the control objective of definition 3.1. It is based on continuous second-order sliding-mode control.
Proposition 3.4
Consider the time derivative of (6) and (4) in closed-loop with a super-twisting control

with
1. The closed-loop system takes the form

with
2. The closed-loop system has a globally finite-time stable equilibrium point at the desired point
3. The closed-loop system has a zero dynamics of first order given by

where
Proof
The point I can be directly verified by replacing the control law (12) in (4) to obtain the closed-loop system in (13). Notice that (13) expresses decoupled dynamics for

for i = 1, 2. Thus, related to point 2, it has been proved that, for bounded continuously differentiable disturbances, that is, if

Finally, regarding to point 3, the derivation of the zero dynamics can be addressed similarly as in proposition 3.2. Since v1 = 0, v2 = 0, and
Remark 3.5
Both controllers given by (7) and (12) can be implemented for forward and backward motion to track desired trajectories. Consider u1 as the first component of the control vector Forward motion control: set β = 0 in (5) and Backward motion control: set β = π in (5) and
Desired trajectories definition
The problem stated in definition 2.1 requires the robot to reach a desired position and orientation. Up to now, the presented controllers drive to zero the position coordinates
Let us first formulate the generation of a parabolic trajectory that accomplishes the constraint that the slope of the curve at the final desired position

where p ∈ ℝ represents the constant distance between the vertex and the focus and h, k ∈ ℝ are the vertex coordinates of the parabola (see Figure 2).

Parabolic desired trajectory symmetric to an axis parallel to
Without loss of generality, consider the final desired position

Moreover, evaluating (16) at the desired position (origin of the plane), we get

Thus, from (17) and (18), the parameters h and k are give by

Since we know the initial position
Then, using the previous results, the proposed trajectory is generalized for an initial pose
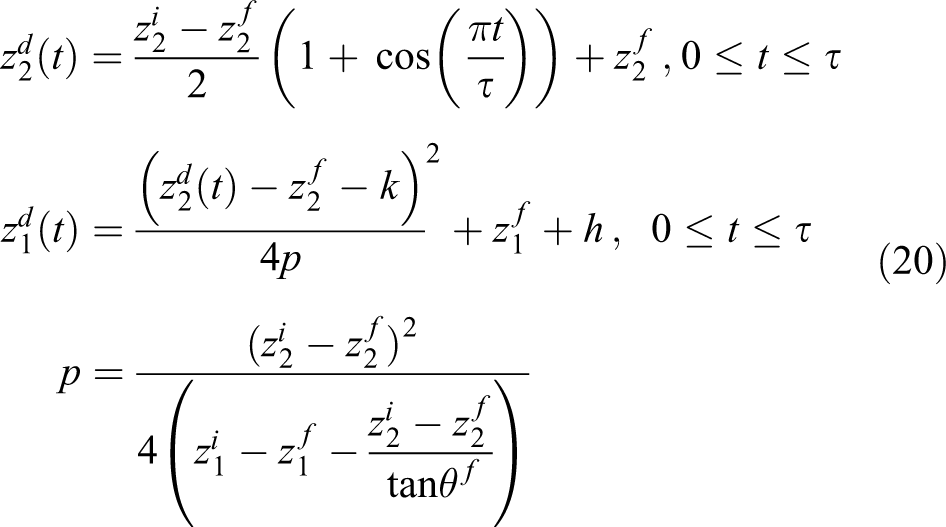
Notice that the computation of the parameters p, h, and k for the trajectory (20) has singularities for some values of θf (0° and 180°). Hence, we propose another complementary option of trajectory that can be used conveniently to avoid the singularities. Following a similar procedure to the previous one, we can define a parabolic trajectory on the


Parabolic desired trajectory symmetric to an axis parallel to
By parameterization of equation (21) in time, we define the following complementary option of desired trajectory
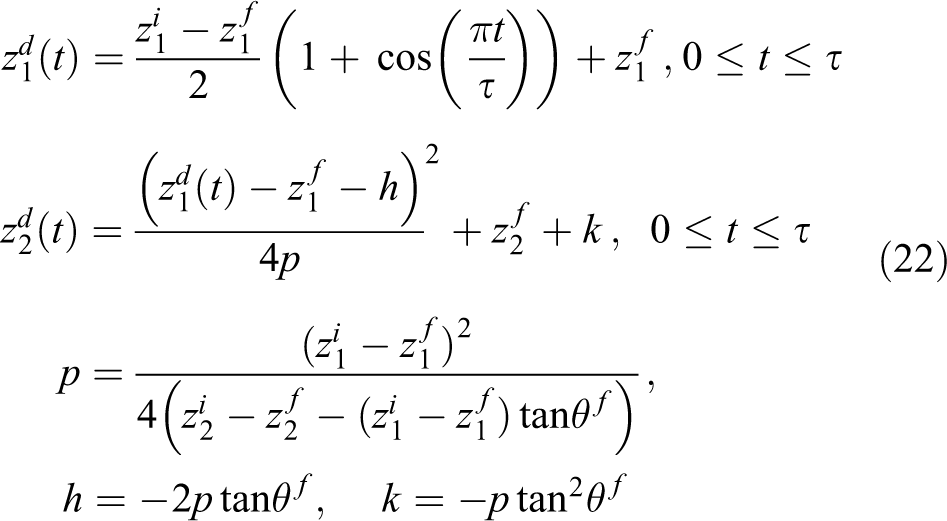
Notice that this second option of trajectory also presents singularities for

where

Thus, we define the following time-parameterized cubic trajectory

Now consider the following complementary cubic polynomial

The corresponding coefficients are computed by imposing the following constraints:

Thus, we define the complementary option of time-parameterized cubic trajectory as

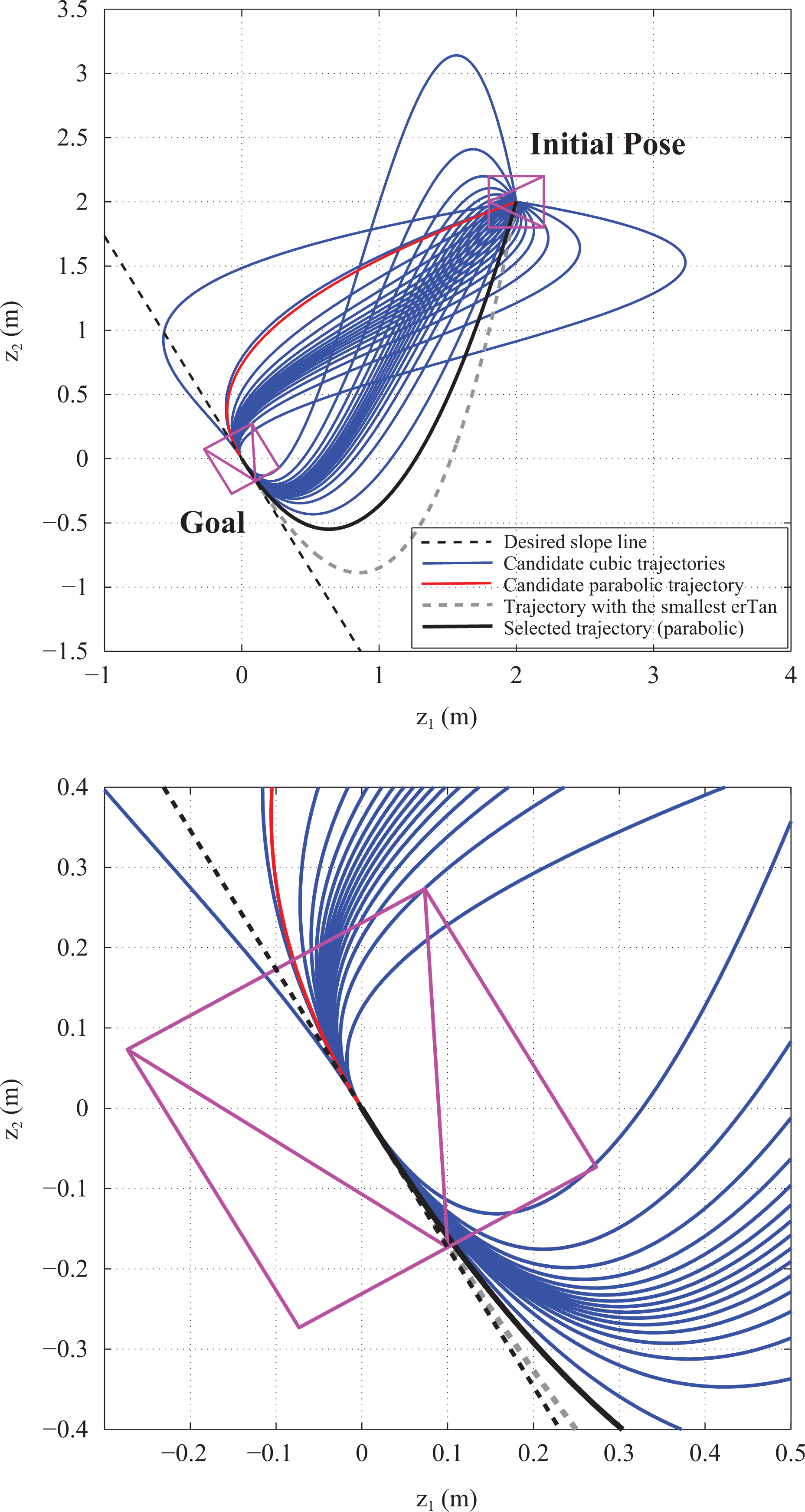
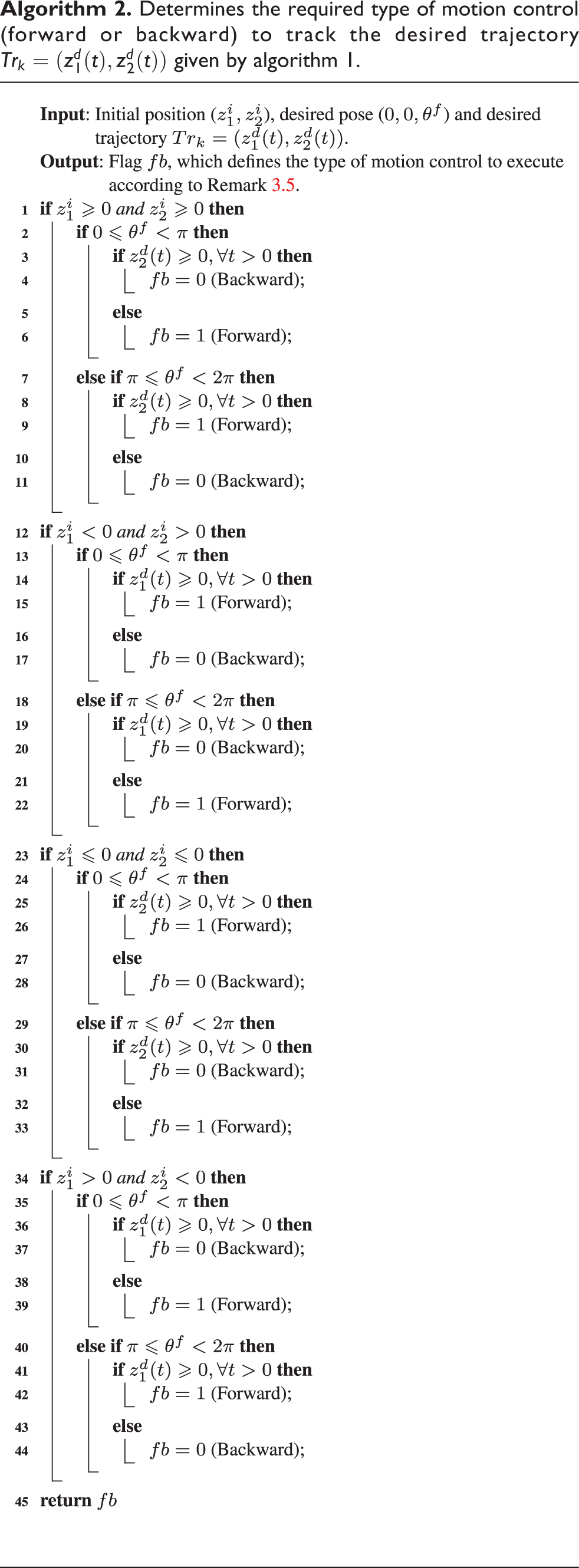
Notice that the computation of coefficients (24) and (27) also generates singularities for some values of θf and ϕi; however, we can have many options of trajectories to chose a non-singular one. Actually, we can generate a set of candidate trajectories and we have two ways of motion control to track the selected trajectory (forward and backward). The candidates are the result of the two parabolic trajectories of (20) and (22) and the two cubic trajectories (25) and (28) for different values of the degree of freedom ϕi involved in the coefficients of the polynomials. Thus, we propose a strategy to select the trajectory which favors the accuracy to reach the desired orientation. Algorithm 1 presents our proposal to generate a set of candidate trajectories, all of them reaching the desired position and accomplishing the constraint of the curve’s slope at the final position. From a set of candidate parabolic and cubic trajectories, the notion is to select the trajectory whose error between its slope and the desired slope (
Generates a set of candidate trajectories and finds the best one to be tracked.

Figure 4 shows an example of the execution of algorithm 1 for some initial and desired poses. The desired final slope is depicted as the dashed black line. The red curve corresponds to one of the parabolic candidate trajectories. The set of blue curves are generated by the cubic polynomials using ϕi from 0° to 180° with increments of δ = 10°. Thus, we have a total of n = 40 candidate trajectories. From those trajectories, the one whose slope is closest to the desired one some time before to reach the final position is the dashed gray line. Such trajectory favors the accuracy to reach the desired orientation due to the robot aligns to the desired orientation previous to reach the desired position, preventing to perform large rotations at the end that might introduce orientation error. Usually, trajectories that best favor the orientation correction are long trajectories and the selection must be constrained to a reasonable length. In the case of the figure, the finally selected trajectory is shown as a continuous black line and corresponds to a parabolic curve. It provides a good compromise between orientation correction and length of the trajectory. Of course, it is not always the case that a parabolic trajectory is selected.
Different candidate trajectories to reach the pose (
As aforementioned, singularities in the computation of candidate trajectories appear for some values of θf and ϕi. However, for general initial and desired poses, many candidate trajectories can be generated from the non-singular values and one trajectory can be selected. Some particular poses are an issue for the proposed strategy, where no feasible candidate trajectories of limited length can be generated, for example, when
To finish the description of the planning stage that defines the desired trajectory, notice in Figure 4 that the selected trajectory must be tracked in backward motion to reach the desired orientation
Determines the required type of motion control (forward or backward) to track the desired trajectory
The tracking of the proposed trajectories allow us to define a fixed temporal horizon τ to reach the desired robot pose at difference of classical stabilization/regulation schemes for WMR. 5,2 Notice that the robot always begins over the desired trajectory, so that the controller has to maintain the tracking of it. Due to the nonholonomic motion of the robot, the tracking controller drives the robot to perform an initial autonomous rotation to get aligned with the trajectory, independently of the initial robot orientation. Next, it is proved that the desired orientation is also achieved by tracking the proposed trajectories, in such a way that pose-regulation is accomplished.
Proposition 4.1
The tracking of the reference trajectory specified by algorithm 1 using any of the robust controllers (7) or (12) and the type of motion determined by algorithm 2 drives the virtual control point of the perturbed differential-drive robot (4) to reach the desired pose (
Proof
It is clear the global robust stability of the error system (8), respectively (13), with the controller (7), respectively (12), which drives the robot position to the desired values

From these relationships we get

Let us consider the relationships between Cartesian coordinates of the parabolic trajectory (22) and the cubic trajectory (25) as instances of our procedure. A similar analysis follows for the complementary trajectories (20) and (28). The derivative

for the parabolic and cubic trajectories, respectively. Thus, according to (29), the robot’s orientation can be computed as follows when the z1 and z2-coordinates track the corresponding desired trajectory for the parabolic and cubic trajectories, respectively

As aforementioned, when the robot has tracked the corresponding trajectory and t = τ, the position reaches the goal (z1 = 0, z2 = 0). Since the trajectories are defined such that their slope comply with the constraint

for the parabolic trajectory according to the equation of h in (22). It directly follows from (31) that
Evaluation of the method
In this section, we present an evaluation of the proposed method through simulations and experiments using indistinctly each controller, (7) the proportional–integral control (PIC) or (12) the super-twisting control (STC). Simulations were implemented using Webots
30
with the differential-drive robot Pioneer 3-DX [Figure 5 (left)]. A GPS and a compass provide the required feedback information. Experiments were carried out using a TurtleBot 2 robot (Figure 5 (right)). A motion capture system provides the position and orientation of the robot for feedback. The time-derivatives required by the control laws are implemented using the forward Euler approximation. It is worth noting that the method can be applied using any differential-drive robot, the robots used in the evaluation of the method, the Pioneer 3-DX and the TurtleBot 2, are just two examples. Experimental setup using Webots simulator17 with a Pioneer 3-DX robot (left) and using a real robot TurtleBot 2 (right).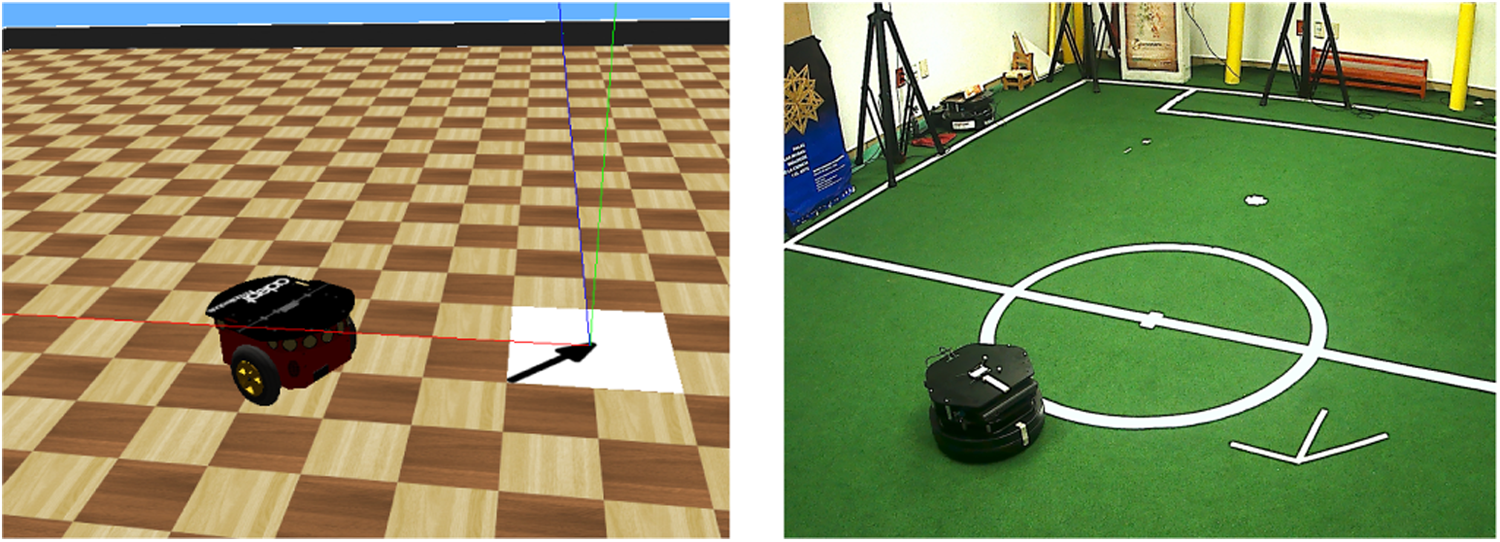
Simulation results
First, we present simulation results obtained in Webots. In all the simulations, we have introduced as disturbances d1 = 0.1 m/s for the translational velocity v and d2 = −0.1 rad/s for the rotational velocity ω. We assumed that the virtual control point is at l = 0.1 m. The control gains were fixed to kp = 1.5, ki = 1.5 for the PIC and k1 = 0.6, k2 = 0.03 for the STC. As shown in “Robust trajectory tracking control” section, the stability of the closed-loop dynamics is verified for positive control gains; however, it is expected that the reference tracking performance degenerates for small control gains. Thus, the gains were manually tuned to obtain small tracking errors. Notice that the tracking errors start in zero because the virtual control point starts on the reference trajectory, the controller must keep the errors around zero and therefore no high gains are needed.
We have defined that the robot has to reach the desired pose in τ = 30 s in most of the simulations. An important consideration for the parameter τ is that it must not be too small such that the maximum translational robot speed vmax could be exceeded for the desired traverse distance. For the Pioneer 3-DX robot,
Comparison with other approaches
In this first part of the results, we compare the proposed approach with two existing methods in the literature for simultaneous convergence of position and orientation of differential-drive robots. The first method, proposed by Martins et al., 12 is similar to ours in the sense that it is a robust trajectory tracking scheme for wheeled robots able to reject kinematic disturbances. In that work, the kinematic controller is formulated using the classical idea of a virtual reference robot 5,6,14 with a discontinuous sliding-mode control. It is the kind of scheme that controls the three state variables of the robot to track desired values. The second method to compare, proposed by López-Nicolás and Sagüés, 11 is a different approach that provides exponential stabilization of the robot state, such that the executed trajectories are arbitrary. For the Martins’ scheme, we use the same trajectories than ours with the same magnitude of disturbance of 0.1, while for the López-Nicolás’ scheme, we introduce a very small disturbance a thousand times smaller, since it is not a robust approach. We report the results using the PIC; however, similar results are obtained with the STC.
Figure 6 shows the results for each one of the compared schemes initializing the robot from 10 different poses. In all the cases, the desired position is the origin of the plane and the desired orientation is zero. From the 10 initial poses, we have included in the plots the best and worst final pose of the robot in terms of position and orientation errors. The best case is shown in black and the worst case in red. Although the three schemes are able to drive the robot to a neighborhood of the desired pose, the proposed approach behaves better than the other two, being very accurate in the best case and with a reasonable orientation error in the worst case. The quantitative information of the final error is given in Table 1. For all the three schemes, the best case corresponds to the initial poses where the robot moves in straight line to reach the goal and the worst case corresponds to the initial poses where the robot has to perform a large rotation close to the goal.

Comparison of control schemes for simultaneous convergence of position and orientation from different initial positions. Top-left: the proposed approach using the PIC. Top-right: Martins et al. scheme.16 Bottom: López-Nicolás and Sagüés’ scheme. 11 PIC: proportional–integral control; STC: super-twisting control.
Comparison of control schemes for simultaneous convergence of position and orientation for the best and worst experimental runs presented in Figure 6.

PIC: proportional–integral control.
Different final orientations from the same initial pose
The second part of the results evaluates the proposed approach for a single initial robot pose (x = 3 m, y = 2 m, θ = 180°) to reach the origin of the z1 − z2 plane for four experimental runs and for a different final desired orientation in each case. The desired orientation for each case is

Different candidate trajectories according to algorithm 1 for initial robot pose
Figure 8 shows the executed trajectories and the corresponding references for the four experimental runs. Two of the cases were executed using the PIC and the other two using the STC. In the four cases, the desired trajectories were selected as cubic curves by algorithm 1. The trajectory to reach θf = 0° is the only one tracked in backward motion and the others are tracked in forward motion according to algorithm 2. This is why the trajectory in black in Figure 8, corresponding to θf = 0, starts in a different position than the others, since the virtual control point in this case is behind the robot reference frame as defined in Figure 1 (right). For each of the evaluated cases in Figure 8, the final position error, given by the Euclidean distance between the final position and the origin of the plane, is less than 1 cm for each case. The mean squared tracking error is less than 10 cm2 for each case. The final orientation errors for the goals θf = 0 deg, θf = 150°, θf = 220°, and θf = 315° are 0.8 deg, 4.9 deg, 0.4 deg, and 2.3 deg, respectively.

Executed and desired trajectories starting from the same initial robot pose
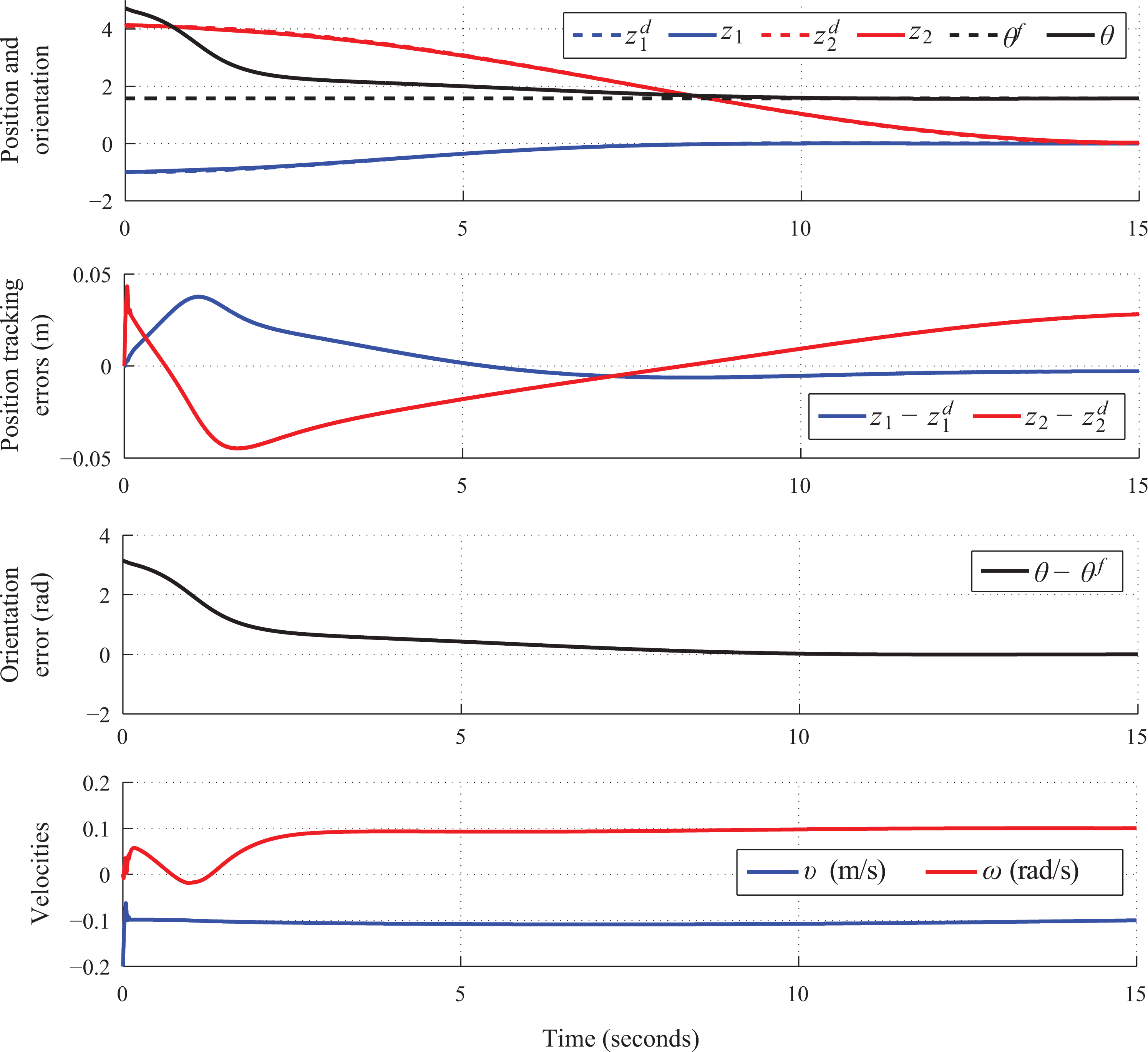
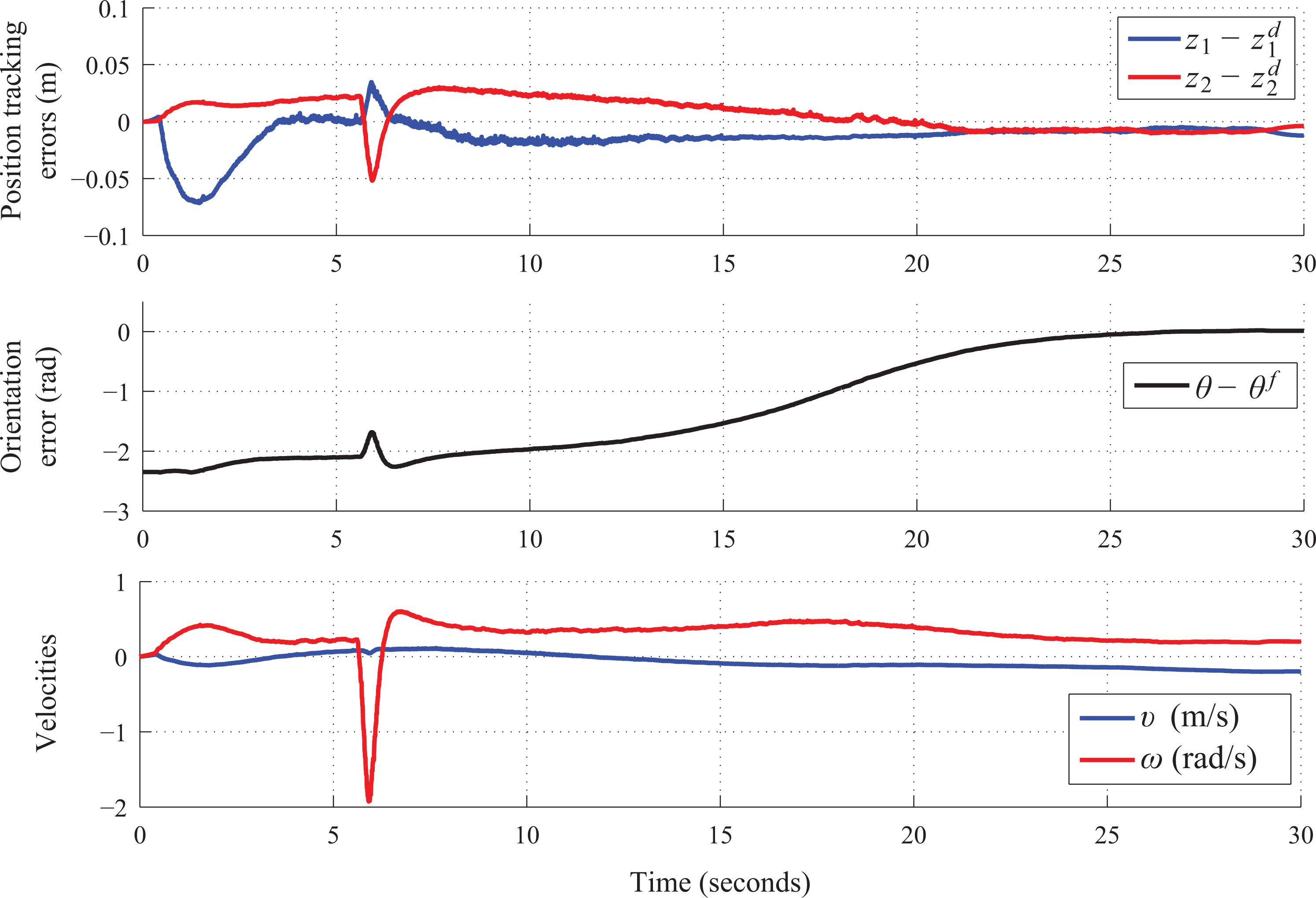
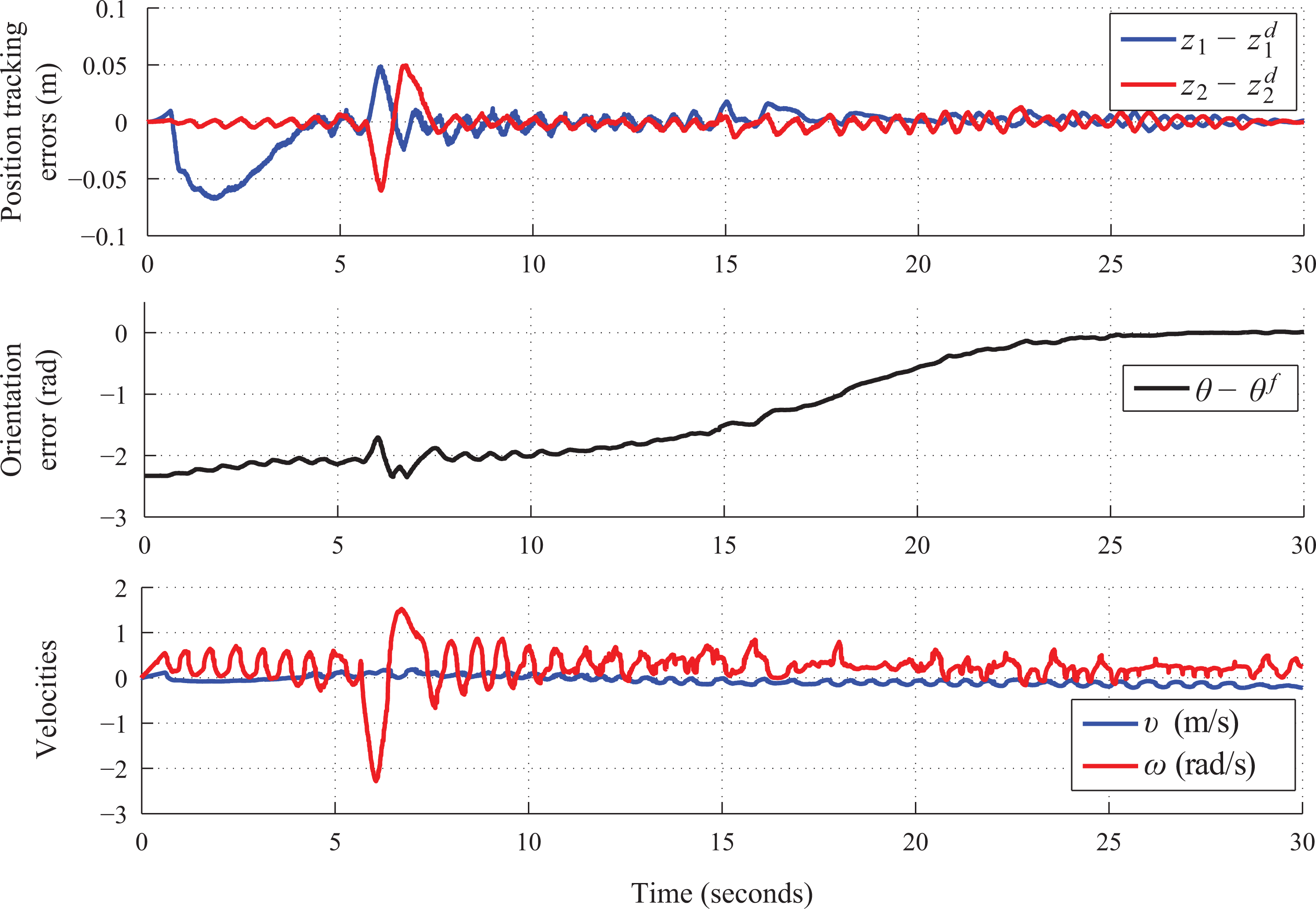
Two examples, for θf = 0° with STC and θf = 220° with PIC, of the evolution of the robot pose, errors, and velocities with respect to time are shown in Figures 9 and 10, respectively. We can see the good tracking of the desired trajectories for position coordinates z1 and z2, such that the real evolution of these variables are almost over imposed to the references. Also, the orientation error is taken really close to zero in the desired time τ = 30 s using either controller. The bottom plots of the same Figures 9 and 10 present the evolution of the robot velocities with respect to time. A transient response can be appreciated in the plots of the rotational velocity in the first 5 s. This is due to the initial rotation that the controller enforces on the robot to align it to the trajectory. The transient could be faster for higher control gains, but the magnitude of the required velocities would increase up the maximum allowable range, which is not desirable. Currently, we left as future work to consider velocity constraints in the design of trajectories and gains tuning. According to the figures, the velocities settle at the contrary sign values of the introduced constant disturbances, such that they are effectively rejected. Notice that although the STC is continuous in contrast to classical sliding mode control, 29 it generates a small high-frequency component on the velocities that can be reduced if the control loop is even faster.

Evolution of the robot pose, errors, and velocities with respect to time for the case of desired orientation θf = 0° using the STC. STC: super-twisting control.

Evolution of the robot pose, errors, and velocities with respect to time for the case of desired orientation θf = 220 deg using the PIC. PIC: proportional–integral control.
We present a set of snapshots of the simulated experiment for the case of desired orientation θf = 315° in Figure 11. The top-left image corresponds to the initial pose and the bottom-right corresponds to the final pose. It can be seen that the robot moves forward in this case. The goal pose is reached in the desired time considering the capture time of the snapshots (see Figure 11).

Snapshots of an experiment at t = 0, 2, 6, 10, 14, 18, 22, 26, and 30 s for the case of desired orientation θf = 315° using the STC. The arrow on the floor indicates the desired final position (arrowhead) and orientation. STC: super-twisting control
A single final pose from different initial poses
The third part of the results corresponds to four different initial robot poses to reach the origin of the z1 − z2 plane with desired orientation θf = 90° deg for all the cases. Additionally, we tested the behavior of the method for a higher robot speed, that is, the desired time to reach the target was reduced in the middle (now 15 s). As expected, if the robot is required to reach the target faster (of course complying with the velocity bounds), a faster correction of the tracking errors is needed to maintain a good performance, and consequently the control gains must be higher. Thus, the control gains were changed two times larger than in the previous simulations and the speed of the control cycle was reduced to 1 ms. Figure 12 presents the executed trajectories and the corresponding references for each experimental run. Two of the cases were executed using the PIC and the other two using the STC. In this second part, algorithm 1 determines that for the case of initial pose

Executed and desired trajectories starting from four different initial robot poses
Figures 13 and 14 show the evolution of the robot pose, errors, and velocities with respect to time for the cases starting in
Evolution of the robot pose, errors and velocities with respect to time for the case of initial pose

Evolution of the robot pose, errors and velocities with respect to time for the case of initial pose

Snapshots of the simulation at t = 0, 1, 3, 5, 7, 9, 11, 13, and 15 s for the case of
Experiments with a real robot
We also evaluated the method using a real differential-drive robot, a TurtleBot 2, also considering more severe disturbances in the robot velocities and an external disturbance produced by pushing the robot. The push makes that the robot deviates from the desired trajectory for a while, but it recovers the trajectory to eventually reach the desired position and orientation in the desired time (see Figure 16). Notice that we could use any external disturbance that deviates the robot from the desired trajectory, the push by a person is just an example. Another example is a crash with an obstacle that deviates the robot. In this case, the disturbances of the velocities were increased to d1 = 0.2 m/s for the translational velocity v and d2 = −0.2 rad/s for the rotational velocity ω. It is important to notice that we have re-tuned the gains only for these experiments that include an external disturbance, since the deviation of the robot from the desired trajectory may generate large transient velocities. As we are not estimating the magnitude of the disturbance neither its effect in the tracking error, we cannot ensure that the velocities are below their bounds during the transient. In the cases without external disturbance, exceeding the velocity bounds is not a major concern since the tracking error starts in zero and the controller just must keep it low. For the experiments, the control gains were set to kp = 1.5 and ki = 1.5 for the PIC and k1 = 0.57 and k2 = 0.05 for the STC. These gains were defined experimentally to achieve a compromise between good disturbance rejection and final accuracy in the position and orientation correction without exceeding the velocity bounds. This multicriterion context makes the adjustment of the controller gains not an easy task, further knowing that in any control system the gains must be re-tuned for different operation conditions. This procedure is simple for linear systems; however, there is not a general method to set the gains for nonlinear controllers. The hint is to set large enough gains, but it is a future work to take into account a bound of the external disturbance in the tuning of the controller gains.

Snapshots of an experiment at different times including an external disturbance using the PIC. The top-left image corresponds to the initial pose and the bottom-right image shows the robot reaching the desired pose in 30 s. PIC: proportional–integral control.
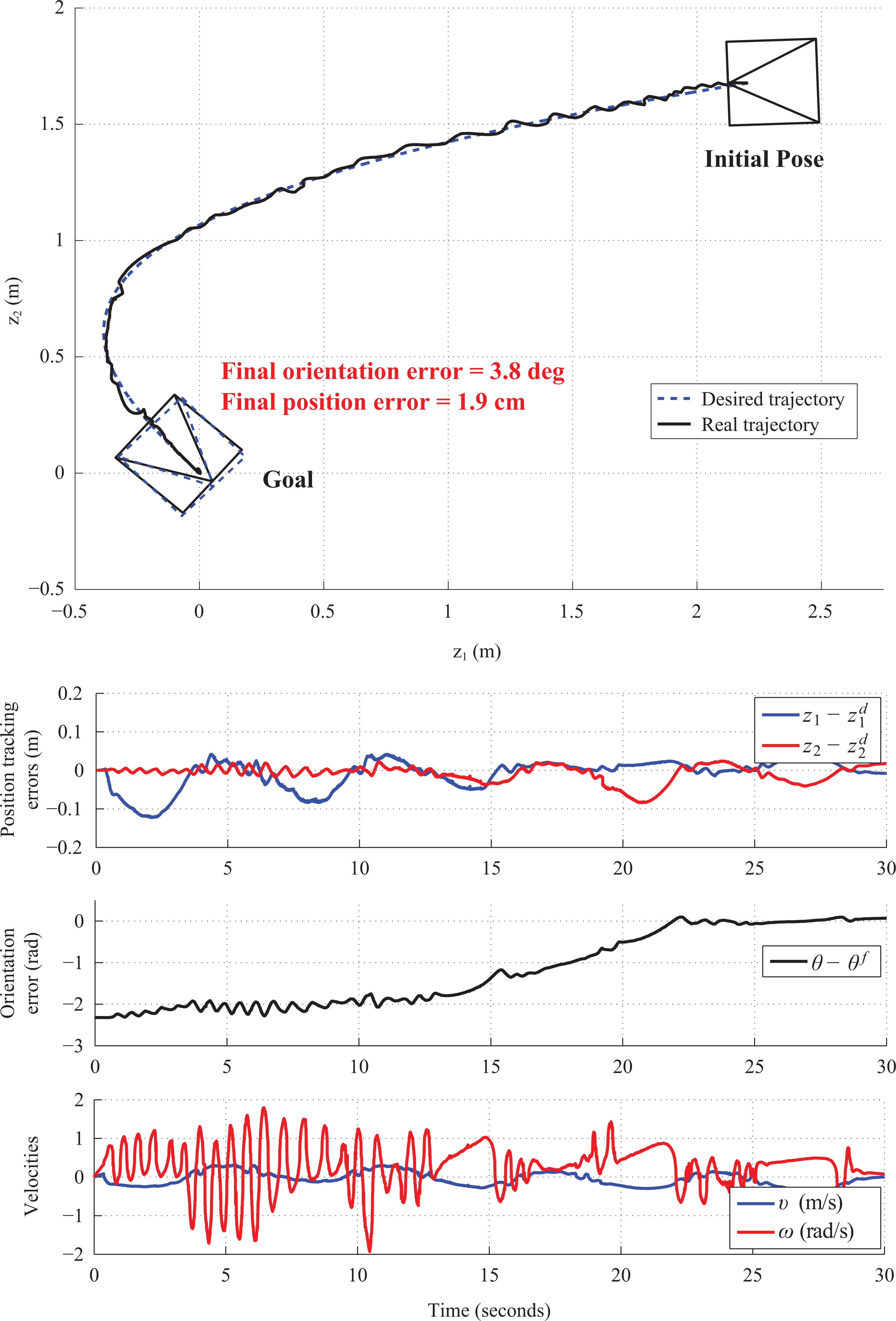
Figure 17 shows the executed and desired trajectories in the experimental runs with external disturbance using the PIC (top) and the STC (bottom). The planned trajectory given by algorithm 1 is a cubic curve. Figures 18 and 19 present the evolution in time of the errors and velocities for the PIC and the STC, respectively. We can see that both controllers maintained the position tracking errors inside the same range of values using similar magnitude of control effort. Moreover, the robot velocities are below of their allowable values (

Executed and desired trajectories for the experiments with a real robot, reaching the origin of the plane in 30 s with desired orientation 315°. Top: Using PIC. Bottom: Using STC. PIC: proportional–integral control; STC: super-twisting control.
Evolution of the tracking errors and velocities with respect to time using the PIC in the experiments with a real robot. PIC: proportional–integral control.
Evolution of the tracking errors and velocities with respect to time using the STC in the experiments with a real robot. STC: super-twisting control.
We have carried out a final test in order to present the behavior of the STC for time-varying disturbances (matched bounded disturbances). It can be verified
29
that the proof of proposition 3.4 works for general matched bounded disturbances. Thus, the STC is able to deal with bounded time-varying disturbances as shown in Figure 20. In this case, we use
Evaluation of the approach using a real robot for time-varying disturbances with the STC as the controller. STC: super-twisting control.
Discussion of the results and comparison
According to the evaluation of the method, we can say that the proposed approach is a good option for an accurate regulation of the pose of WMRs. It has been compared with existing approaches 11,12 in which the orientation is also included in the control loop and our approach has outperformed them. The main advantage of the method with respect to others is the simplification of the control structure introduced by the fact that the orientation is not directly controlled in the closed-loop. Thus, no explicit planning for the orientation angle is required unlike the classical approach of tracking a virtual reference robot. 5,6,13,14 A benefit of the proposed approach is that it generates continuous and smooth robot velocities using a single controller. This would not be the case if optimal length trajectories (straight lines) will be use. If a desired final pose is required using straight line trajectories, the robot must be controlled in three steps, two different controllers are needed and the switching between them would generate discontinuous robot velocities. Indeed, even the super-twisting sliding mode controller yields continuous control inputs, which mitigates the chattering issue in comparison to classical sliding mode controllers. 9,12 The method allows us to fix a temporal horizon to reach the desired robot pose at difference of classical stabilization/regulation schemes for WMR. 2,5
On the other hand, the trajectory must be correctly selected and accurately tracked in order to achieve good accuracy in the final pose. The generation of the candidate trajectories is really fast and it is done only one time before to start the local navigation. The approach works for any initial and final poses except for those configurations where there is only lateral error between the poses. This is a drawback of the trajectory planning strategy that has some singularities in the computations. However, the singular cases are detectable and the robot can be moved out of that situation before starting the closed-loop control. Finally, the method assumes that the feedback measurements are accurate, which is accomplished in the real experiments and consequently the results are very similar to the simulations. However, the performance might degenerate for instance if estimation of the robot state is carried out from on-board sensors.
Conclusions and future work
In this article, we have addressed the pose-regulation problem of a perturbed underactuated mobile robot, that is, drive the robot to reach simultaneously a desired position and orientation regardless of matched bounded disturbances in the control inputs. The proposed method is a solution for local navigation to move a differential-drive robot between two different poses, focusing on the task to reach the final pose with good accuracy. The pose-regulation problem is faced by tracking adequate trajectories for the position coordinates, such that the robot’s orientation reaches a final desired value due to the nonholonomic motion constraint, since the robot’s heading evolves tangent to the trajectory of position. Two alternatives of robust kinematic controllers are presented to ensure an accurate trajectory tracking, a proportional–integral control and a super-twisting sliding mode control. Moreover, an offline trajectory planning strategy details how to define the adequate trajectories on the basis of quadratic and cubic polynomials and specifies the correct motion direction to track them (forward or backward). We have found that although cubic polynomials provide one more degree of freedom to define the trajectories, they are not always the best option. Quadratic polynomials must be also considered as candidates in order to improve the accuracy in the orientation correction. Compared to classical stabilization/regulation schemes for WMRs, our proposal allow us to define the time of convergence. Moreover, the resulting time-dependent control inputs are smooth. Realistic simulations, comparisons with existing approaches, and experiments in a real setup have shown the good performance of the proposed control scheme.
As future work, we plan to consider the maximum allowable velocities as a constraint in the design of the desired trajectories and to include a collision avoidance strategy while performing robust trajectory tracking. We consider that the algorithm could be extended to deal with obstacles using a waypoints approach given a sequence of desired poses.
Supplementary Material
Supplementary Material
Supplemental material for Simultaneous convergence of position and orientation of wheeled mobile robots using trajectory planning and robust controllers by Héctor M Becerra, J Armando Colunga, and Jose Guadalupe Romero in International Journal of Advanced Robotic Systems
Footnotes
Acknowledgements
The first two authors of the article were partially supported by CONACYT. The authors would also like to acknowledge the financial support of Intel Corporation for the development of this project.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The first two authors of the article were partially supported by CONACYT under grant 220796. The authors would also like to acknowledge the financial support of Intel Corporation for the development of this project.
Supplemental material
Supplementary material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.