
Abstract
This paper proposes a robust tracking controller based on the Fuzzy Disturbance Observer (FDO) for a Wheeled Mobile Robot (WMR) with unknown skidding and slipping. The proposed method provides disturbance-free techniques for stability analysis. In our previous work [1], we proposed an extended state-observer approach to robust tracking control for wheeled mobile robots with skidding and slipping. Even though satisfying performances were shown and the proposed method was verified in [1], the derivatives of disturbance should go to zero as time passes in order to guarantee performance. This is a very critical assumption. The method proposed in this paper overcomes this problem using universal approximation with a fuzzy model. Thus, the condition that disturbance should disappear with time is not required anymore. Furthermore, the proposed method can be used more widely than that shown in the previous work. This is guaranteed by a Lyapunov-theory-based stability analysis, and performance is verified by simulation results.
1. Introduction
Stabilization of nonholonomic WMRs has attracted much attention due to the inherent nonlinearity in the dynamics of these robots. In particular, studies of WMR with skidding and slipping have been carried out for tracking control, since skidding and slipping can happen in various real environments, such as on wet roads and icy roads and in rapid cornering, and the nonholonomic constraints can be perturbed [1–7]. In order to achieve the tracking control, not only kinematics but also dynamics of WMRs should be defined. Hence, the kinematics and dynamics of WMRs with skidding and slipping have been redefined; skidding and slipping are defined by input-additive and unmatched perturbations of the kinematics and dynamics of a WMR [3].
Based on this redefinition, the objective of previous studies [2, 5, 6] was to improve the robustness against disturbance in tracking control using robust techniques. In order to prove the stability of system, previous studies have needed to choose proper norm bounds. Since the dynamics of a nonholonomic WMR show highly nonlinear behaviour, it is difficult to estimate the proper norm bound.
The use of a disturbance observer can resolve these difficulties. Disturbance estimation techniques such as Extended State Observer (ESO) [13–15] or Nonlinear Disturbance Observer (NDO) [16, 17] are particularly crucial for disturbance attenuation. Disturbance-observer-based control has the advantage of compensating many uncertainties in control systems, which are unmeasurable. The present author has earlier proposed an extended state-observer approach to robust tracking control for wheeled mobile robots with skidding and slipping [1].
However, from a control theoretical viewpoint, the previous work still presents a problem: it relies on the assumption that the derivative of disturbances should converge to zero with time in order to guarantee the stability of the control system [1, 13–17]. This means that disturbances disappear with time. In practice, nevertheless, real skidding and slipping do not disappear with time, which to say that the derivatives of disturbances never go to zero with time. Without the assumption, the controller proposed in the previous work not only cannot achieve the desired goal and but will even make WMRs unstable. This is a fatal weakness for implementation.
In order to overcome the problem, the robust tracking controller based on the FDO method for a WMR with skidding and slipping, which occur throughout the operation of WMRs, is proposed as an expansion of our previous work in this paper. With universal approximation of fuzzy modelling, FDO is adopted to design a disturbance observer. Although disturbances represent highly nonlinear behaviour, the proposed method approximates the disturbances. In addition, it can analyse the stability and design a controller free from the assumption of disturbances. The performance of the proposed method is verified by a comparison with the previous work.
This paper is organized as follows. Section 2 shows the modified model of a nonholonomic WMR with skidding and slipping and the FDO for a general nonlinear system. A design and stability analysis of the proposed FDO-based tracking control details is described in section 3. Simulation results of the proposed controller with a WMR are given in section 4, followed by the conclusion in section 5.
2. Fuzzy disturbance observer design for the WMR with skidding and slipping
2.1 Description of the modified WMR with skidding and slipping
We consider the perturbed nonholonomic constraints with skidding and slipping as follows:
The kinematics of mobile robots considering skidding and slipping is obtained as in [1]:

The dynamics of mobile robots considering skidding and slipping is obtained as in [1]:

We can rewrite (3) as follows:

Since A(q, q̇), B(q) is changed by q, which is affected by unknown skidding and slipping, we should consider parameter uncertainties and parameter variation of the dynamics of the WMR. Therefore, (4) is rewritten as follows:



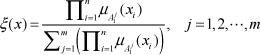
2.2 Fuzzy disturbance observer
We now describe a fuzzy system to approximate the disturbance. The basic configuration of a fuzzy logic system consists of a fuzzifier, some fuzzy IF-THEN rules, a fuzzy inference engine and a defuzzifier. The fuzzy inference engine uses the fuzzy IF-THEN rules to perform a mapping from an input linguistic vector x = (x1, x2, …, x
n
)
T
∈ R
n
to an output variable y ∈ R. The i th fuzzy rule is written as



The task of this section is to develop an FDO and a tuning method so that the developed disturbance observer is guaranteed to monitor and accurately represent the disturbance that occurs [8]. To proceed with the development, the following assumption is required.


For system (7), the fuzzy disturbance observer is designed as follows:






3. Robust tracking controller based on the proposed FDO
In this section, we discuss the proposed fuzzy-disturbances observer-based robust tracking control for the WMR with skidding and slipping. First of all, we describe the tracking error dynamics of the WMR. Then, if the skidding and slipping are unmeasurable, the estimate of the disturbances can be used for control design using the proposed FDO. The stability of the system is proved in the form of a proposition. The main idea of this section is to develop the proposed FDO and a tuning method so that the developed disturbance observer is guaranteed to monitor and represent the disturbances well. The proposed controller attenuates the disturbance to improve the tracking performance. The configuration of the proposed FDO-based control for the WMR is shown in Figure 1.

The configuration of the proposed FDO-based control for the WMR
A reference trajectory q
r
(t) = [x
r
(t) y
r
(t) φ
r
(t)
T
is represented by

The tracking error is expressed relative to the local coordinate frame fixed on the mobile robot as E
p
= T(q
r
- q) or



To design the control input and generate the desired velocities z
c
, the auxiliary velocity tracking error is defined as


Using the fuzzy disturbance observer (14), we can estimate the disturbance (16) and attenuate the disturbance for tracking control. To make the tracking error dynamics stable, the torque term as the input in (28) is chosen as

We consider a nonholonomic WMR (7) with an unknown disturbance D(z, τ) caused by skidding and slipping. To construct an FDO D̂(z, τ | θ̂) that is guaranteed to monitor an unknown D(·), the adaptation law must be provided for the adjustable parameters Φ̂.
The main objective of this paper is to design the robust tracking controller based on the FDO. In order to achieve this, the Lyapunov function (22) should be modified as the Lyapunov function (31). Then, the adaptation law can be obtained as (30). This is explained in detail in the following theorem.

Proof
Consider the Tyapunov function candidate for tracking control systems of WMR with skidding and slipping




Differentiating (31), we obtain






Note that the previous scheme to solve WMR with skidding and slipping is limited by the assumption that disturbances are bounded and that derivatives of disturbance should converge to zero with time in order to guarantee the stability of the control system [1–6], whereas there is no assumption of disturbance for the stability analysis in the proposed method as shown in Theorem 1.
4. Simulation results
In order to demonstrate the validity of the suggested control scheme, a comparative simulation with the scheme proposed in [1] is performed. An elliptical reference trajectory is used, given by xr =10cos(t), y
r
= 6 sin(t), φ
r
= tan-1(ẏ
r
/ ẋ
r
). The reference linear and angular velocities (42) are given by


4.1 Case 1: The derivatives of disturbances converge to zero with time
The disturbances used in [1] are given; these disturbances satisfy assumption 1 and their derivatives converge to zero with time, as shown in Figure 2.

Disturbances of forward and angular velocity caused by skidding and slipping in case 1; In case that the derivatives of disturbances converge to zero as time goes
As Figures 3 and 4 show, both the Generalized Extended State Disturbance Observer (GESDO)-based control method and the proposed control method solve the skidding and slipping problem given in case 1. The performance of GESDO in case 1 has been already proven in [1]. Figure 4 shows the estimation error of disturbances. The proposed controller depends on selecting the membership functions to estimate the disturbances. There seem to be larger forward velocity errors than with the GESDO-based controller from 0.5 to 3 sec. However, the proposed method shows smaller chattering phenomenon than the GESDO method. The GESDO method also depends on the disturbance compensation gain. The tracking control performances are quite similar and it is hard to decide which method is better on this basis. However, it is verified that the proposed control method also achieves the desired goal under the same conditions through this case study. What is noteworthy is that real skidding and slipping do not disappear with time. This means that the derivatives of disturbances never go to zero with time, although they may have small values. Therefore, the disturbances used in case 2 must be considered instead of those used in case 1.
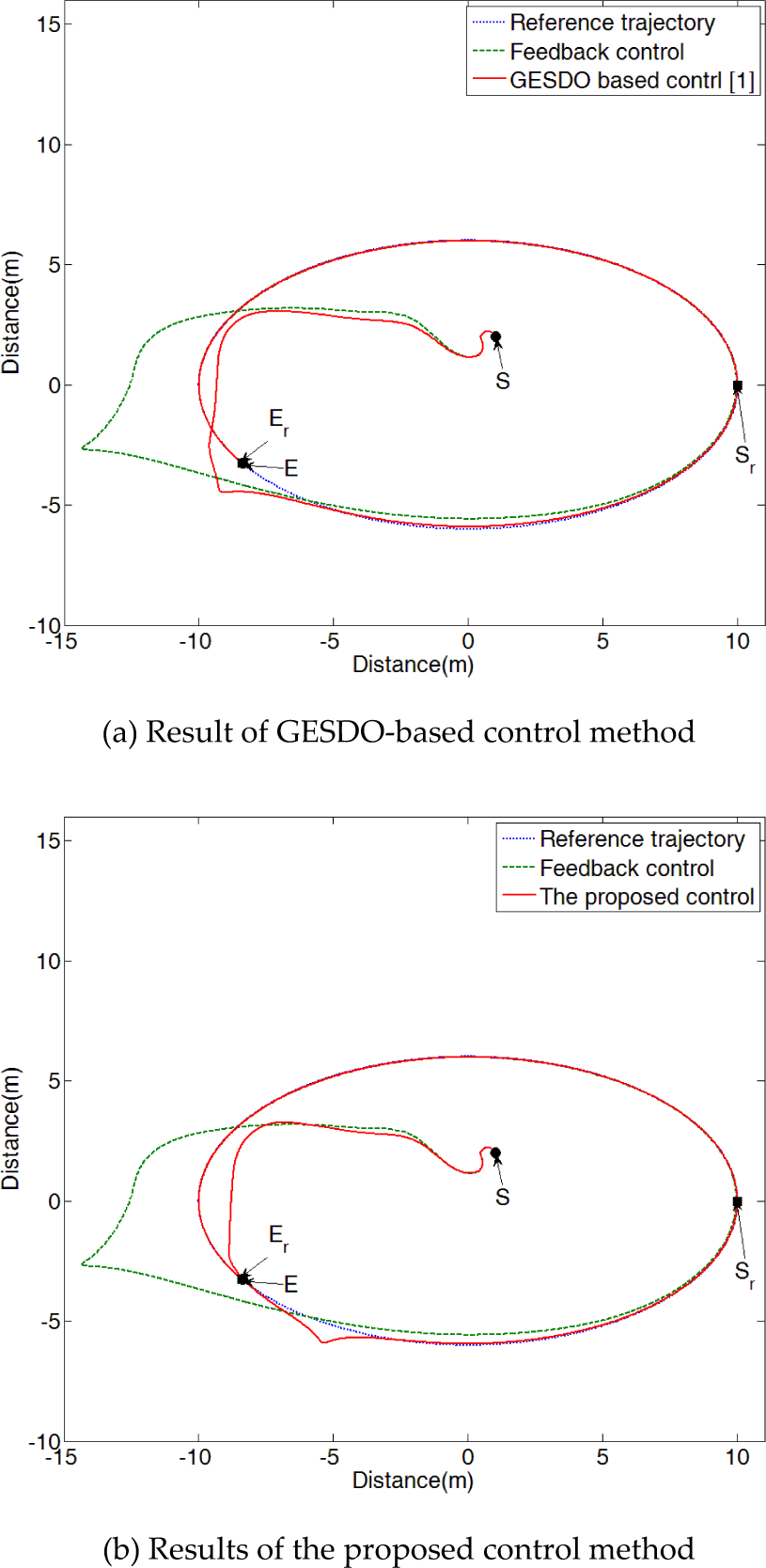
Trajectory-tracking control performance of the WMR in case 1 (S: Start-point of a WMR, E: End-point of a WMR, Sr: Start-point of reference, Er: End-point of reference)
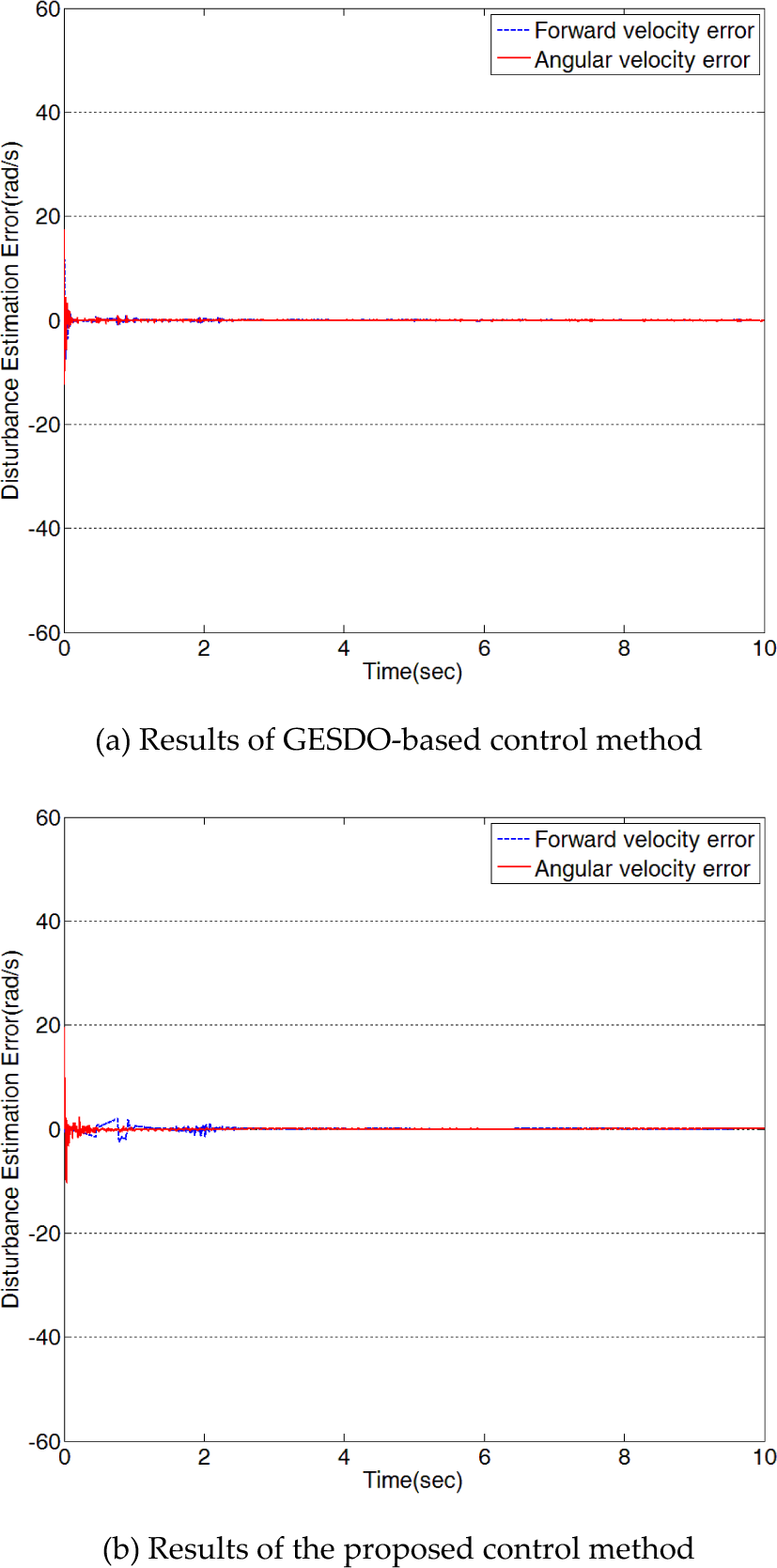
Disturbance estimation errors in case 1
4.2 Case 2: The derivatives of disturbances DO NOT converge to zero with time
Here, two cases of skidding and slipping are described:
Case 2–1: Skidding and slipping can occur when a WMR turns curves on slippery roads quickly. To implement a simulation of slippery roads, we use the disturbance functions [μ ξ r , ξ l ] = [6 cos(t) 6 cos(t) 3].
Case 2–2: Periodic skidding and slipping can occur on icy roads. We select the disturbance functions [μ ξ r ξ l ] = [4 cos(5t) 4 sin(5t) 6 cos(5t)].
The above two cases satisfy assumption 1, and these derivatives of disturbances do not converge to zero with time, as shown in Figures 5 and 9.
Disturbances of forward and angular velocity caused by skidding and slipping in case 2–1

Trajectory-tracking control performance of the WMR in case 2–1 (S: Start-point of a WMR E: End-point of a WMR, Sr: Start-point of reference, Er: End-point of reference)

Disturbances estimation errors in case 2–1

Trajectory-tracking error of the WMR in case 2–1

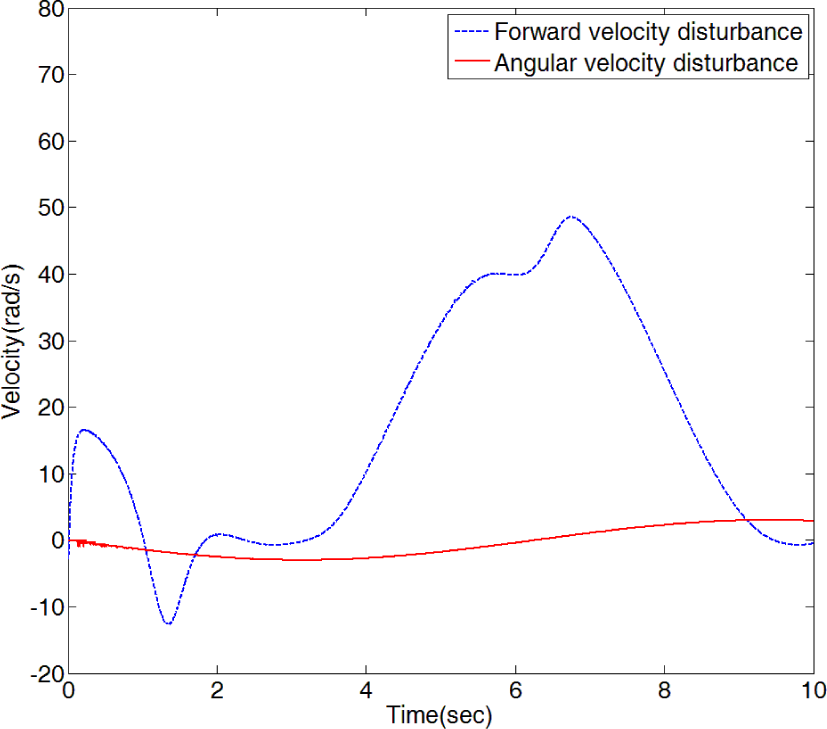
Disturbances of forward and angular velocity caused by skidding and slipping in case 2–2
The objective of this study is to verify that the proposed method overcomes more varied disturbances and is more useful in practice than our previous work. The forward and angular velocity disturbances caused by skidding and slipping given in case 2 are shown in Figures 5 and 9. As already mentioned, their derivatives do not go to zero, which means disturbances exist while WMRs follow the desired trajectory.
In cases where the derivatives of disturbances DO NOT converge to zero with time, Figures 6 and 10 present the trajectory-tracking performance of both methods according to each disturbance. Since the GESDO-based control method assumes that the derivatives of disturbance should converge to zero with time, and the guarantee of its stability relies on this, the tracking result diverges. On the other hand, the proposed controller overcomes the same problem because it adopts a fuzzy model, which is a universal approximation model for designing a disturbance observer. This means no assumption about disturbances is necessary. Figures 7 and 11 show disturbance estimation performance and describe the estimation error. That of the proposed controller goes to zero or is bounded in a small region, whereas the estimation error of the GESDO-based controller does not; the GESDO-based controller thus fails to achieve the control goal. Figures 8 and 12 show the trajectory-tracking errors of the WMR. The proposed control method is less dependent on disturbance type than the method presented in [1].

Trajectory-tracking control performance of the WMR in case 2–2 (S: Start-point of a WMR, E: End-point of a WMR, Sr: Start-point of reference, Er: End point of reference)
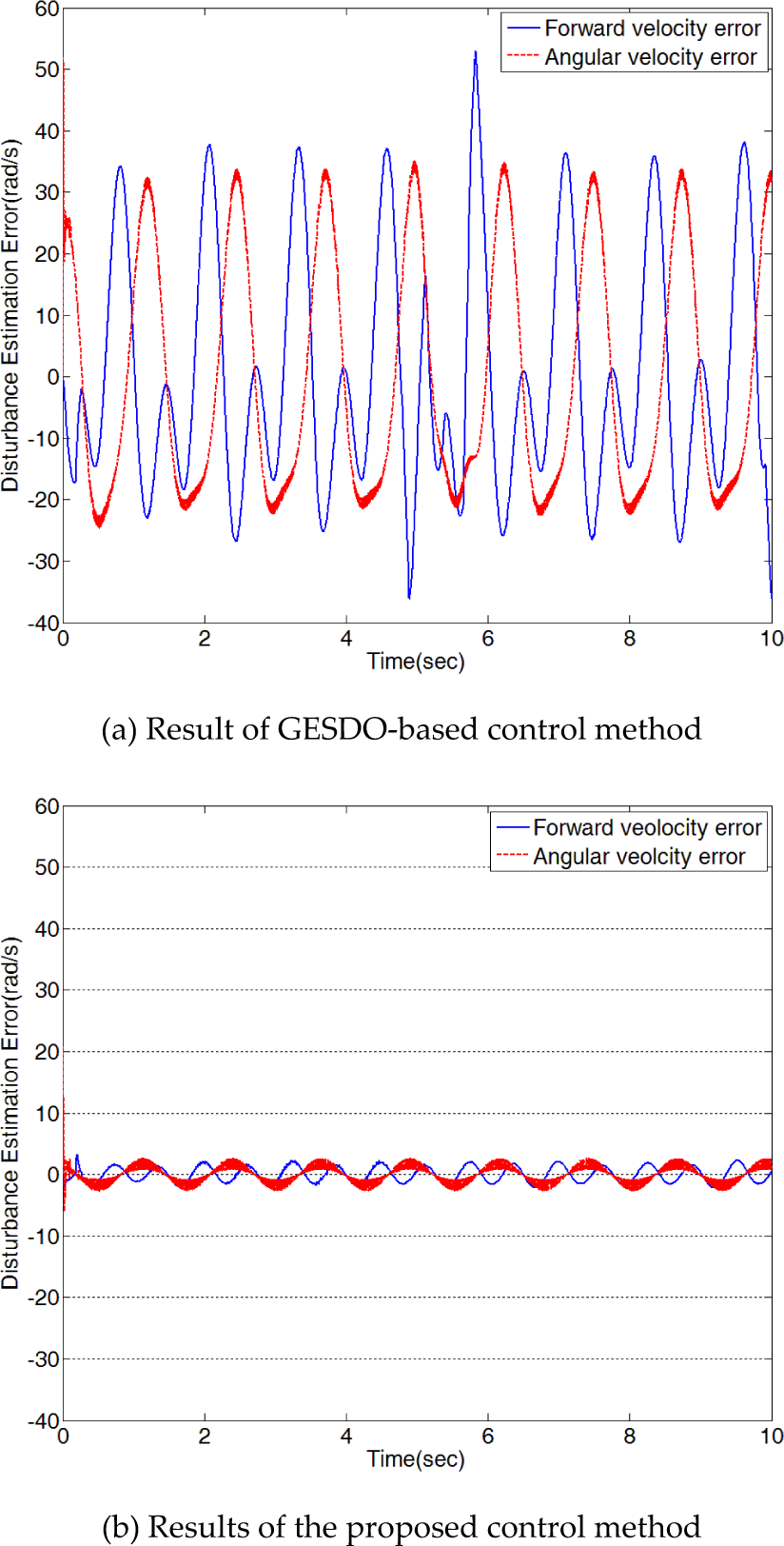
Disturbances estimation errors in case 2–2

Trajectory-tracking error of the WMR in case 2–2
5. Conclusion
In this paper, a robust tracking controller based on the FDO for a WMR with unknown skidding and slipping is proposed as an expansion of our previous work. A universal approximation, fuzzy modelling is adopted to design a disturbance observer. It frees the proposed method from any disturbance assumption to analyse the stability and design a controller with wide applicability. Through two case studies, it was shown that real skidding and slipping do not disappear with time, which means that the derivatives of disturbances never go to zero with time. In addition, it was verified that the proposed control method achieves the desired goal under such conditions. Consequently, the results verified that the proposed controller provides robustness against unknown skidding and slipping without assuming them, and shows significant tracking performance.
Footnotes
6. Acknowledgements
This research was supported by the Basic Science Research Programme through the National Research Foundation of Korea (NRF), funded by the Ministry of Education (NRF-2011-0009541).