
Abstract
In this article, the problem of robust tracking control for wheeled mobile robot (WMR) with skidding, slipping, and parameter uncertainties is addressed. Through designing double sliding mode variables, a fixed time disturbance observer is developed to estimate the multiple disturbances within a fixed time, and the convergence time is regardless of the initial estimation error of the system. Based on the fixed-time disturbance observer (FTDOB) and the novel power reaching law sliding mode technique, a robust tracking controller is synthesized. The proposed control method eliminates the chattering problem existing in the traditional sliding mode control, and can guarantee the high-precision tracking control performance even in the presence of skidding, slipping and parameter uncertainties. The closed-loop system stability analysis is verified by the Lyapunov stability theory. Meanwhile, simulation comparative results are carried out to illustrate the effectiveness of the proposed control method.
Keywords
Introduction
Recently, the WMR system has widely used in many areas, such as military area, space exploration area and civilian application field. In order to effectively carry out the practical applications in many different areas, it is important that the control method developed for the WMR should have a very high performance. Therefore, the WMR control problem has attracted much attention and there have appeared many advanced control methods for the control of WMR, such as back-stepping control, 1 artificial intelligent method, 2 adaptive and robust control method3,4 and sliding mode control,5,6 etc.
In Jiangdagger and Nijmeijer, 1 based on the back-stepping technique a time-varying state feedback tracking control method was proposed for a two-degrees-of-freedom mobile robot. In Boukens et al., 2 a robust intelligent controller based on artificial intelligent method was presented for a class of nonholonomic electrically driven mobile robots with high-degree parameter uncertainties and external disturbances. In Xin et al., 3 based on disturbance observer and adaptive compensator a robust trajectory tracking controller was developed for dealing with the system uncertainties of WMR. In Cui et al., 5 developed a modified sliding mode control scheme for the tracking control of WMR with unknown parameter variations and external disturbances.
Almost the control methods mentioned in the above literature do not consider the influence of the WMR’ skidding and slipping, but in practical applications the work environment of the WMR is complicated. The WMR is often required to work on the wet roads, icy roads, and sometimes it is need to complete rapid cornering. To the best of my knowledge, there are very few papers to deal with the tracking control problem of the WMR considering skidding and slipping. In Li et al., 7 presented a reinforcement learning-based adaptive neural tracking algorithm for the nonlinear discrete-time dynamic system of the WMR with skidding and slipping. Although the neural network based algorithm can handle the skidding and slipping, but the controller structure is complex and the computational load is heavy, which will affect the practical application of the proposed method. In Chen, 8 designed a robust tracking controller for the control problem of the WMR with skidding, slipping and input disturbance.
Besides the influence of skidding and slipping, the parameter uncertainties also has a great influence on the WMR tracking performance. Due to the existence of multiple disturbances, it is not easy to design a high performance controller for the WMR. In this article, to deal with the adverse effect of multiple disturbances, we will employ the sliding mode control (SMC) method. The SMC method is regarded as one of the robust control methods for tackling system uncertainties and bounded disturbances, and it has been widely applied to the control of uncertain nonlinear systems.9–13 Nevertheless, the conventional sliding mode control has a big defect: in order to suppress the influence of the unknown uncertainties and external disturbances, the control gains of the controller should be set bigger than the upper bound of system uncertainties, which will usually cause control saturation and the serious chattering issue. An effective way to handle the issue of high controller gain is the use of disturbance observer. In recent years, disturbance observer has achieved widely application to handle system uncertainties and the unknown dynamics in many areas.14–23 In Sun and Guo, 24 for tackling multiple mismatched disturbances, a novel controller which combined the advantages of disturbance observer and back-stepping method was investigated for a class of nonlinear system. In Zhang et al., 25 proposed a disturbance observer based control scheme, and the stability analyses were given in this study. To approximate the unknown disturbance, the dead zone and the bounded disturbance, a disturbance observer was designed in Wang et al. 26
This article focus on fixed-time disturbance observer based robust tracking control of wheeled mobile robot with multiple disturbances. The main contributions of this article are shown as follows. (1) With the proposed estimation law of total disturbance, the disturbance estimation error is fixed-time convergence, which improves the performance of disturbance estimation. (2) Based on fixed time disturbance observer and a novel power reaching law, a robust tracking controller is synthesized to achieve the the high-precision tracking control for the WMR with multiple disturbances and eliminate chattering phenomenon of the controller, which makes the controller more practical.
The remainder of this article is organized as follows. The model of the WMR with multiple disturbances is presented in section 2. Section 3 designs a robust tracking controller based on FTDOB and reaching law sliding mode. In section 4, the simulation comparative studies of the proposed controller are performed. Finally, the conclusions are given in section 5.
Problem description
The WMR is presented in Figure 1, it mainly consists of two actuated wheels and a castor wheel mounted at the front of the WMR platform. The distance from the actuated wheels to the symmetric axis of WMR is b, r denotes the actuated wheel’s radius, and d represents the disturbance between the centroid and the geometric center of the WMR. P is the reference point, its position is denoted by
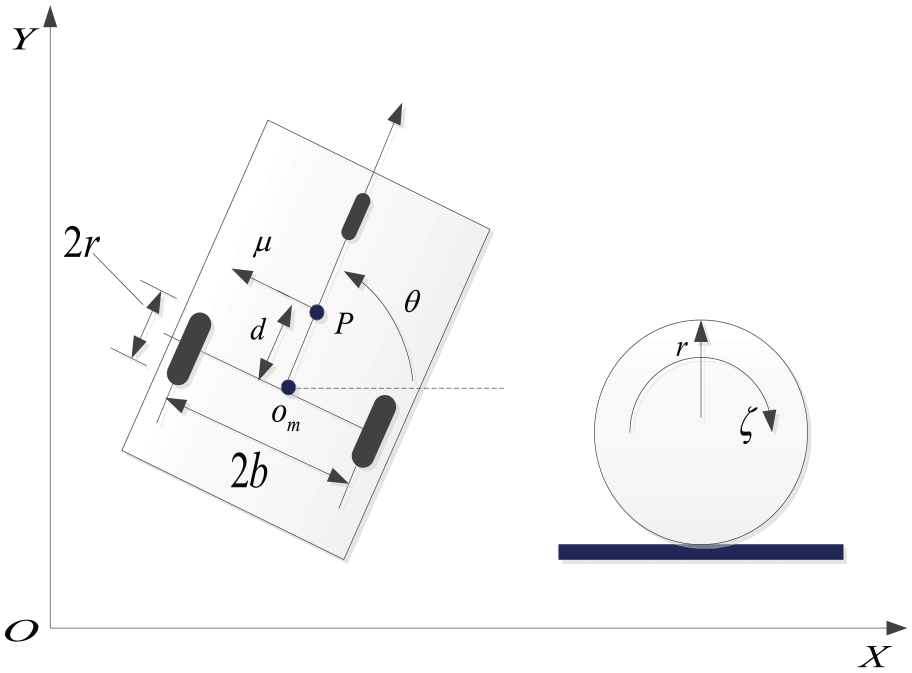
Wheeled mobile robot with skidding and slipping.
From Figure 1, we can easily obtain the perturbed nonholonomic constraints of wheeled mobile robot with skidding and slipping as follows. 27
where
Then, the perturbed nonholonomic constraints (1) can be expressed as the following compact form

where
Let

Therefore, from (1) and (3) we have the mobile robot kinematic model with skidding and slipping.

where
The dynamics model of the nonholonomic mobile robot without wheels’ skidding and slipping is described as Chen. 8

where
In this paper, we suppose that the WMR is move in the horizontal plane, thus

where
Define

In practice, some parameters of a system model may not be achieved accurately. Therefore, we need to divide the matrices
Thus, the model (7) can be rewritten as

where
In this paper, we aim to design a FTDOB based robust tracking controller for the WMR with parameters variation, skidding, and slipping so as to the state of the closed-loop system (8) can follow the desired signal
Design of robust tracking controller
In this subsection, a robust controller for the tracking control of the WMR is presented. Firstly, a FTDOB is designed for estimating the unknown total disturbance of the system (8). Then, combining with the estimation values the robust tracking controller will be constructed. The controller structure of the proposed fixed-time disturbance observer based robust tracking control is depicted in Figure 2.
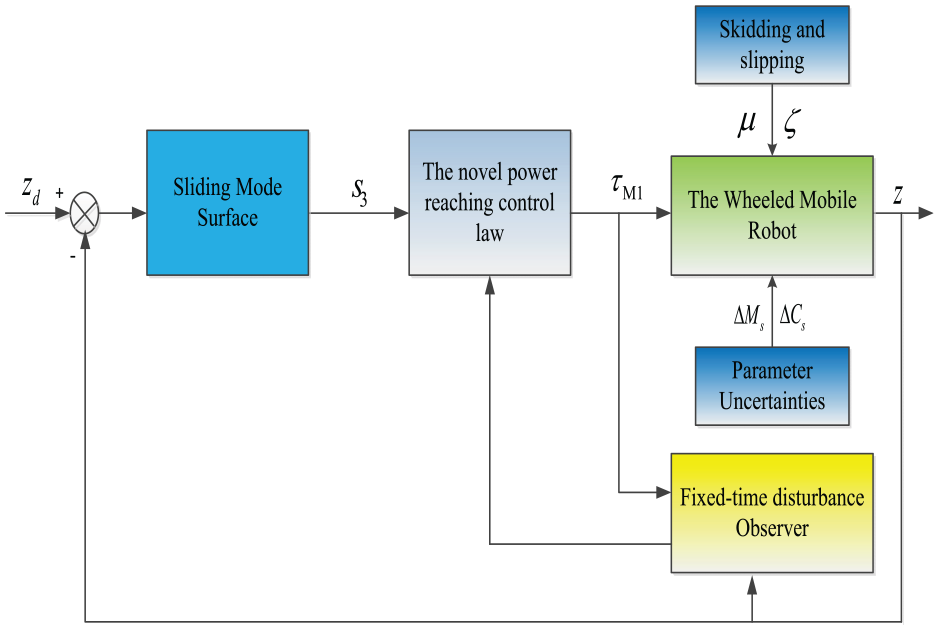
The fixed-time disturbance observer based robust tracking controller structure.
Fixed time disturbance observer design
For further improving system robust performance and avoiding the high gain control problem, a fixed-time convergence disturbance observer is designed in this section.
According to the model of (8), an auxiliary dynamics system is designed as

where
Consider the first sliding mode variable as

where
Then, the following integral sliding mode variable is employed:
where
The time derivative of (11) can be obtained as

From (12), the estimation law of
where
To facilitate the stability analysis of the fixed-time disturbance observer, the following Assumption and Lemmas are given.

where


From (12), the time derivative of
By Lemma 1 and when

Therefore, according to Lemma 2,
Choose the second Lyapunov function candidate

The time derivative of

After

Then, we have
By Lemma 1, inequality (23) can be rewritten as

Therefore, according to Lemma 2,
Hence, it can be concluded easily that the first sliding mode variable
Robust tracking controller design and stability analysis
The tracking error is defined as

where
Based on (25), the integral sliding mode variable is designed as follows:

where

The novel power reaching law is designed as

where

where
From (8), (27), and (28), we can obtain the control law

The convergence analysis of a fixed-time disturbance observer based robust tracking controller for the wheeled mobile robot with parameter variation, skidding and slipping is given by the following Theorem 2.

The time derivatives of (31) is

Substituting (8) and the control law (30) into (32), we can obtain
Therefore, combining with the above two cases the sliding mode variable
Numerical simulation studies
In this section, we perform the numerical simulation studies. Considering the WMR dynamics model represented in (5), the matrices
Comparisons of multiple disturbances’ influence on tracking control
In order to verity the multiple disturbances’ influence on tracking control, the following two situations are compared in simulations.
(1) The proposed control law
(2) The comparative control law

In the following simulations, the parameters of the WMR are set as
The lateral skidding velocity is set as
The controller parameters are fixed for the two different situations. The Fixed-time disturbance observer design parameters are given by
The simulation results are shown in Figures 3 to 6. The estimation errors of the proposed observer is shown in Figure 3. The tracking performance and tracking errors for the reference signals are illustrated in Figures 4 and 5, respectively. The control signals of the two different situations are depicted in Figure 6. From Figure 3, we can observe that the estimation errors of the proposed observer can converge to the zeros within a fixed-time. From Figures 4 and 5, we can find that M1 achieves smaller tracking errors than M2. Figure 6 shows that the control signals of the two different situations are all continuous.
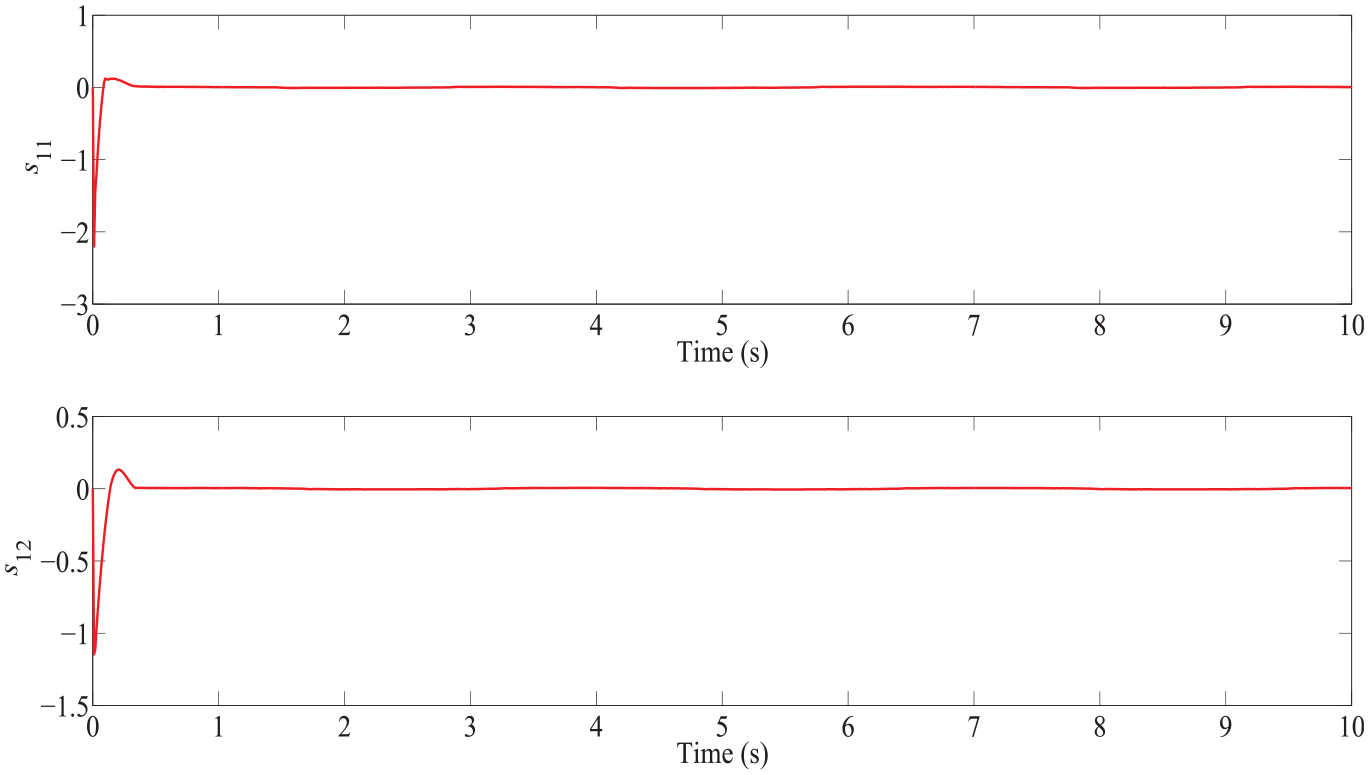
The estimation errors of the proposed observer.
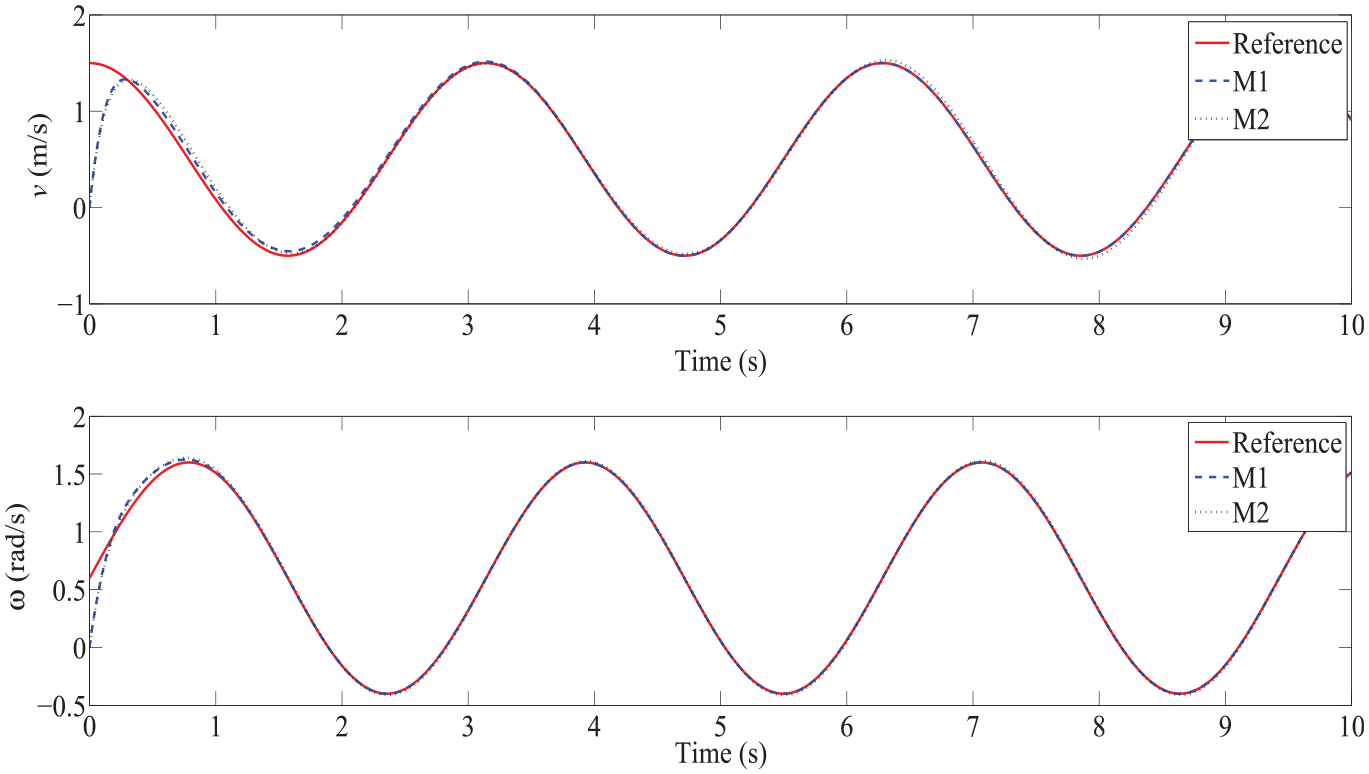
The tracking performance for the reference signals.
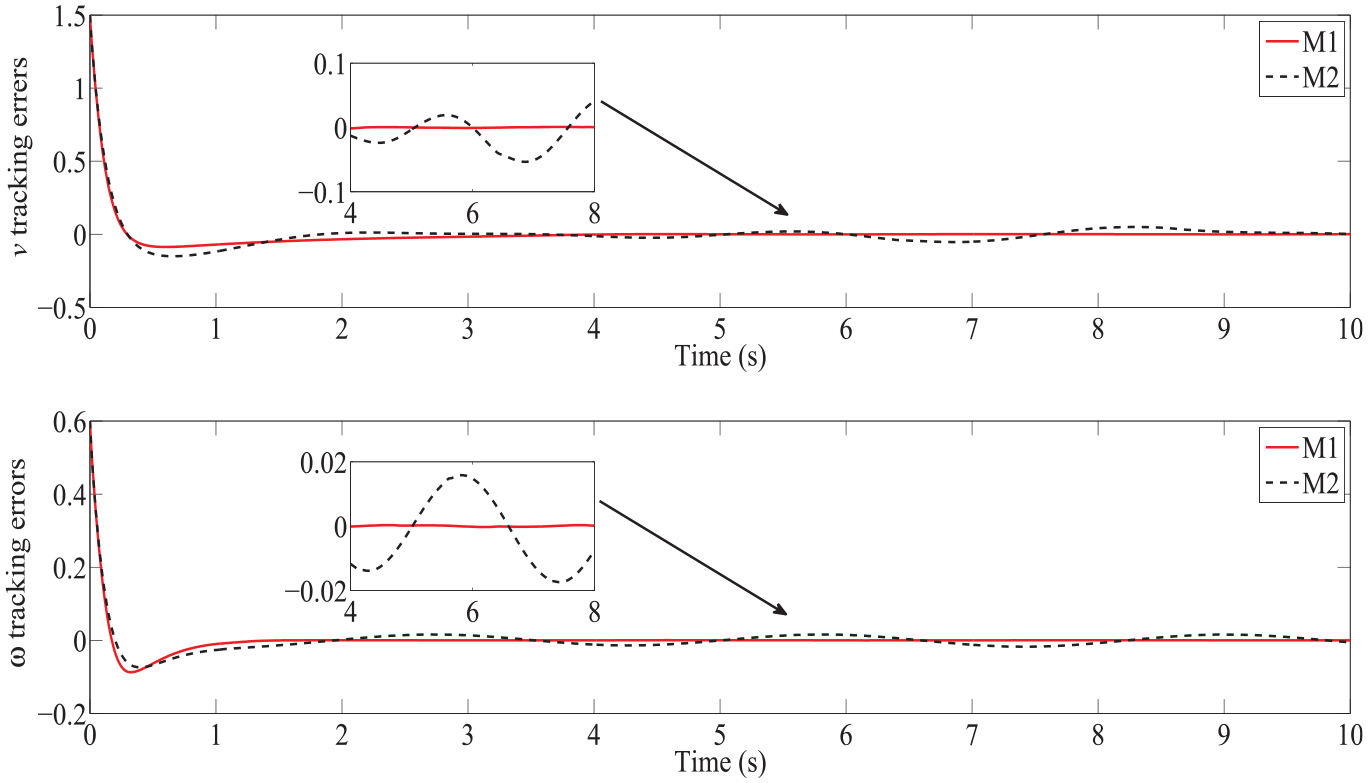
The tracking errors for the reference signals.
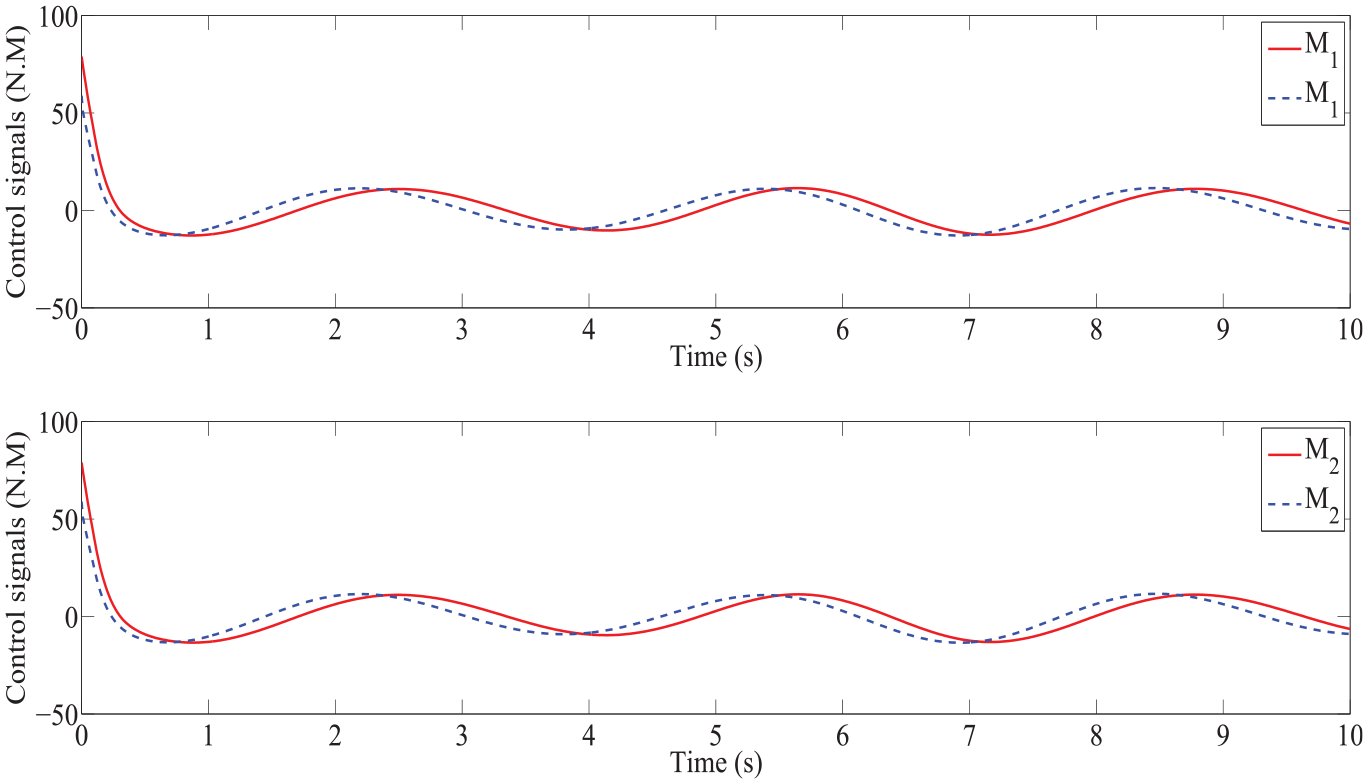
The control signals of the two different situations.
The tracking control performance comparisons
To illustrate the effectiveness of the proposed method M1 for the tracking control of the WMR with skidding, slipping, and parameter uncertainties, we have also constructed the other two different control methods for comparison. According to the exponential reaching law and the double power reaching law,32,33 the exponential reaching law control with fixed-time disturbance observer (M3), and the double power reaching law control with fixed-time disturbance observer (M4) are given for comparison. The control methods M3 and M4 are expressed as follows:

where

where
For convenience, the parameter values of WMR, the uncertainty parts, the reference signals, the lateral skidding velocity, and the slipping velocity are taken the same as previous Section.
The simulation parameters are set as
The comparative results of tracking control performance are presented in Figures 7 to 10. As we can see from Figure 7, the observation errors of method M3 has slightly chattering, however, this phenomenon does not exist in methods M1 and M4. Thus, the estimation performance of method M3 is inferior to that of methods M1 and M4. From Figures 8 and 9, it is easy to find that the proposed control method M1 has better response performance than the other two control methods in regard to faster tracking speed and smaller steady state errors. Figure 10 shows the control signals of M1 and M4 are continuous, while the control signals of M3 exists chattering, which will cause the wear of the actuators and be infeasible in practical applications.
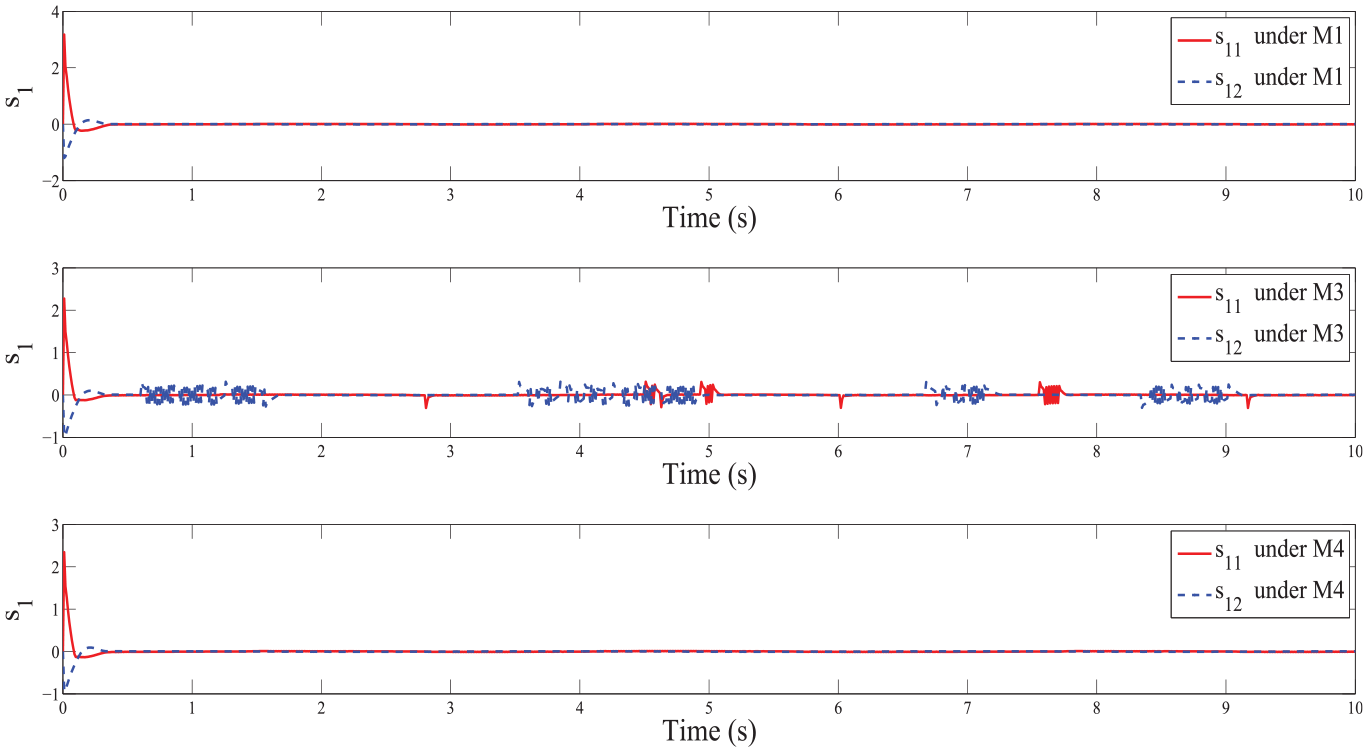
The estimation performance under different control methods.
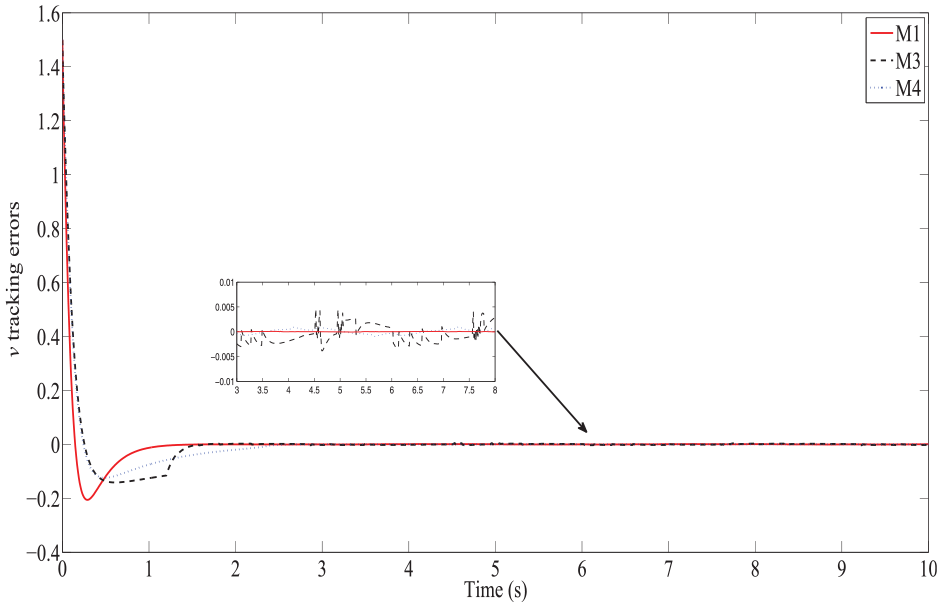
The tracking errors for
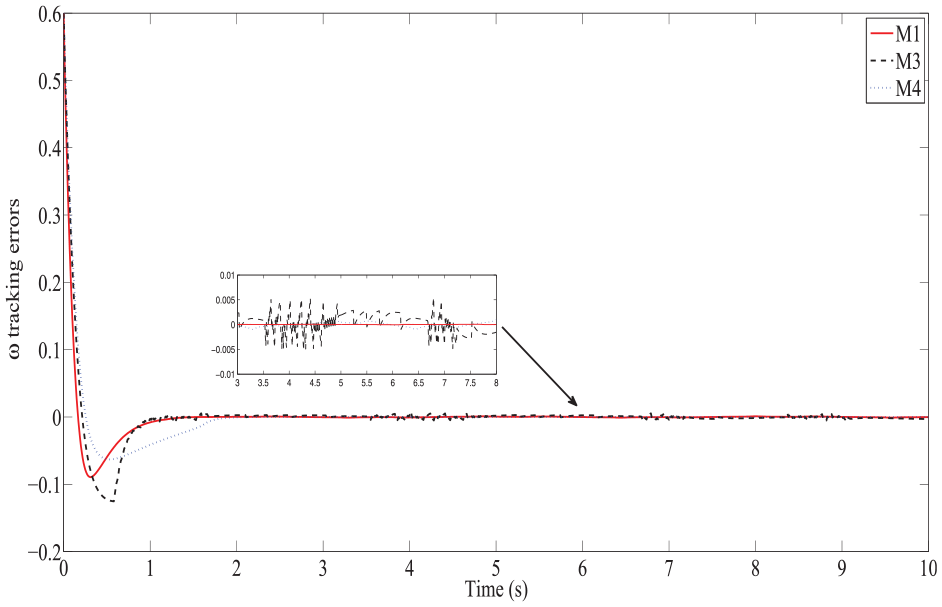
The tracking errors for
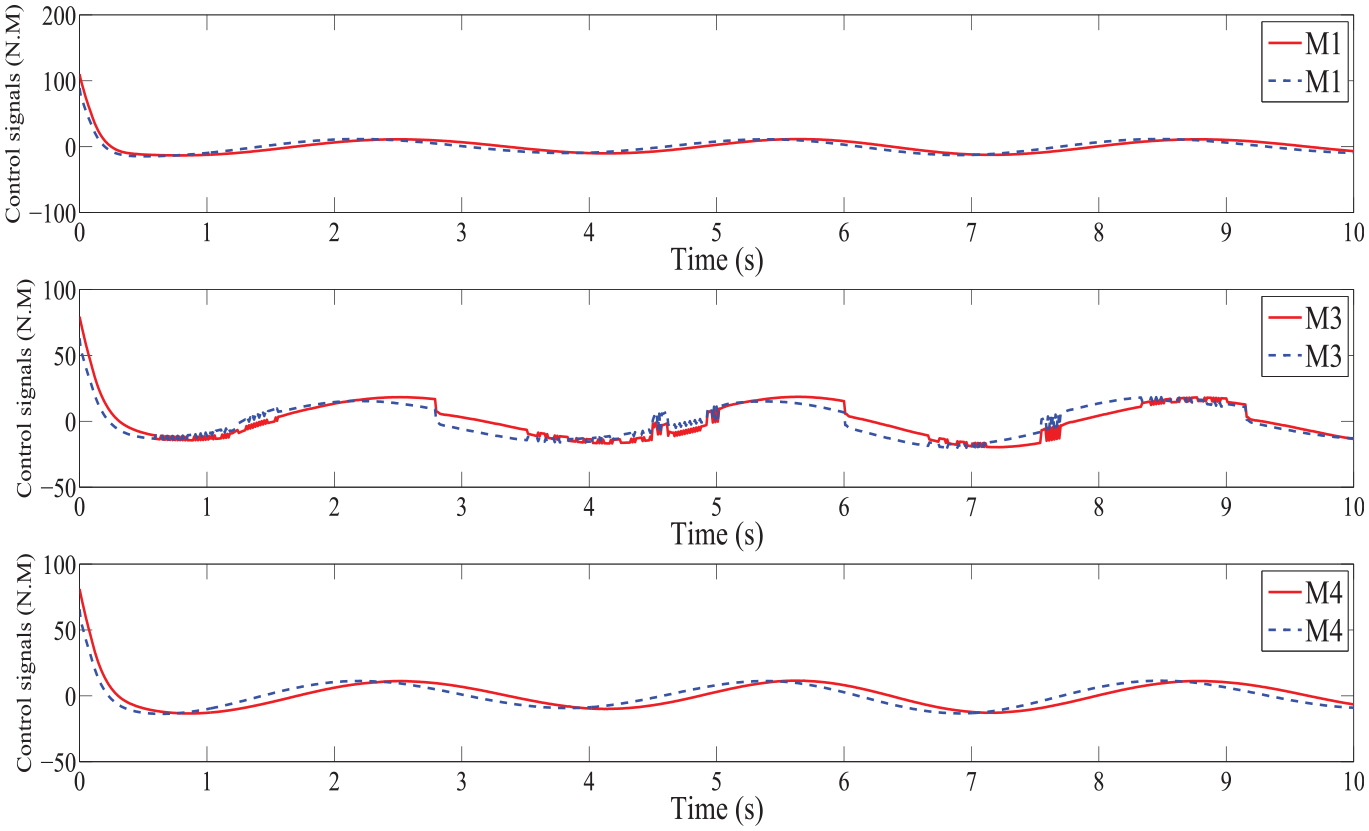
The control signals under different control methods.
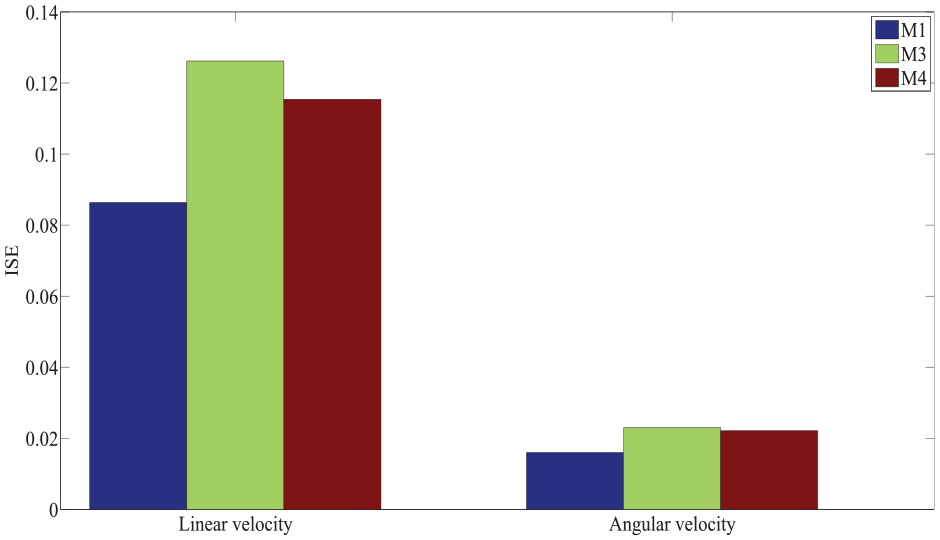
Finally, to quantitatively analyze the tracking performance, one performance indice is employed to evaluate the tracking control performance, that is, the integral of the square of the tracking error (ISE), which is denoted as

where
As shown in Figure 11, it is seen that by using the proposed novel power reaching law to design the control law, M1 can achieve the best tracking control performance among all control methods, which further proves the effectiveness of the proposed control method.
The ISE for tracking control performance under different methods.
Conclusion
In this paper, to achieve the superior control performance, a FTDOB based novel power reaching law controller is proposed for the tracking control of the WMR with skidding, slipping, and parameter uncertainties. The FTDOB is designed to estimate system total disturbance, and then a robust tracking controller is presented based on the estimation, which can effectively guarantee the robust tracking performance, eliminate chattering phenomenon of the controller, and obtain high precision control. Comparative simulation results show that the proposed method is effective and the control signals are continuous. Future research includes designing a robust tracking control method for the WMR with actuator fault problem.
Footnotes
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Natural Science Research Project of Anhui Education Department under Grant 2022AH051951, and in part by the Talents Project of Huangshan University under Grant 2020xkjq007.