
Abstract
This paper represents a robust backstepping tracking control based on a Lyapunov redesign for Skid-Steered Wheeled Mobile Robots (WMRs). We present kinematic and dynamic models that explicitly relate the perturbations to the skidding in order to improve the tracking performance during real running. A robust controller is synthesized in the backstepping approach and the Lyapunov redesign technique, which forces the error dynamics to stabilize to the reference trajectories. We design an additional feedback control - a Lyapunov redesign - such that the overall control stabilizes the actual system in the presence of uncertainty and perturbation with the knowledge of the Lyapunov function. Simulation results are provided to validate and analyse the performance and stability of the proposed controller.
1. Introduction
The control of nonholonomic systems has been an active area of research and development in recent years because nonholonomic constraints arise in many advanced robotic structures, such as mobile robots, space manipulators and multi-fingered robot hands. A mobile robot is one of the well-known systems with nonholonomic constraints and there have been many studies on tracking control [1, 2], such as sliding mode control [3], adaptive control [4–6] and backstepping control [7, 8], as well as intelligent control based on fuzzy systems [9–12]. Most of these previous works assume that nonholonomic constraints are subject to a kind of pure rolling without skidding and slipping. Unfortunately, since wheel skidding is inevitable due to wheel tire deformation, or due to wet or icy roads and rapid cornering, the nonholonomic constraints can be perturbed. Consequently, the stability and performance of these controllers are not guaranteed. Therefore, studies of WMRs with uncertainties and disturbances have provided an attractive issue for tracking control. Most previous studies have only considered kinematic models, but uncertainties and disturbances could not be introduced without the dynamics of the WMRs. Recently, some methods for dynamic models have been proposed [9–13]. In [14], Dixon et al. addressed skidding in order to design robust tracking and regulation controllers using the kinematic model. Robust control offers uniform boundedness solutions. However, if a high-precision control performance is desired, these control laws would require high control input and fast switching actions. A linear time varying controller was proposed in [15] to achieve uniformly locally exponential stability for the Type (2, 0) unicycle based on the dynamic model. In [16], the model is applied to design a slow manifold controller to solve an output-tracking problem. It should be noted that these dynamic models rely on the accurate measurement of parameters, which is not explicitly expressed in terms of skidding state. Moreover, the parameters are difficult to obtain in practice. Since nonholonomic mobile robot dynamics display highly nonlinear behaviour, it is difficult to estimate the proper norm bound. Based on a consideration of the aforementioned robustness perspective, we have designed a stabilizing control input based on a Lyapunov redesign in order to cancel out the uncertainties and disturbances without the estimation of the unknown skidding and nonlinear term of WMRs. In this paper, the robot dynamics and kinematics have been induced from the perturbed nonholonomic constraints. Consequently, the stability and performance of these controllers are not guaranteed. Since nonholonomic mobile robot dynamics exhibit highly nonlinear behaviour, it is difficult to estimate the proper norm bound. Based on a consideration of the aforementioned robustness perspective, we have designed a stabilizing control input based on backstepping control with a Lyapunov redesign in order to cancel out the uncertainties and disturbances without the estimation of the unknown skidding and nonlinear term of WMRs.
In this paper, we propose a robust backstepping controller based on a Lyapunov redesign for skid-steered WMRs. The proposed backstepping controller applies the kinematics and dynamics to analyse and compensate for skidding effects. The backstepping method is used to analyse the system and to design the controller which is making the error dynamics stable. In the first step, we design a virtual control to stabilize the kinematics. Next, we can choose the input term to make the error dynamics stable. In addition, we do not need to estimate the proper norm bound to design the robust controller because a stabilizing control input is designed on the basis of a Lyapunov redesign in order to cancel out the uncertainties and disturbances [17]. The proposed controller compensates for nonlinear terms such as unknown parameters, skidding, and so on, with a Lyapunov redesign. The simulation results show the greater effectiveness of the proposed controller compared to the feedback controller in maintaining the robot on track in an elliptical reference trajectory.
This paper is organized as follows. Section 2 presents the model of the nonholonomic skid-steered WMRs. The controller design for tracking problems and stability analysis are described in Section 3. Simulation results for the proposed controller with WMRs are given in Section 4, followed by the conclusion in Section 5.
2. Model of Skid-Steered Wheeled Mobile Robots
The dynamics of the nonholonomic mobile robot with two actuated wheels in the absence of wheel skidding is described by the Lagrange equation of motion:

where
The WMRs have three perturbed nonholonomic constraints in the presence of skidding, represented as follows:

where μ indicates the lateral skidding velocity in mobile robots, which can easily be caused by the centrifugal force generated when mobile robots travel at high speeds on wet or icy roads or around corners. This value is dependent on the wheel and road conditions and may vary with location. Constraints (2) can be represented by:

where:

S(q) is in the null space of A(q). A matrix S(q) is defined to satisfy A(q)S(q) = 0.
Then, using the perturbed nonholonomic constraints (2) and the matrix S(q), the kinematics of skid-steered mobile robots are obtained as:

Where
Assumption 1 [15]: The
To derive the skid-steered dynamics model, we substitute (4) into (1). Then, the dynamic model is obtained as:

where:

τ=[τ1 τ2] T is the control input. We can rewrite (5) as follows:

where A(q,q̇)= -H−1(q)F1(q, q̇), B(q)= H−1(q). We assume that WMRs are operated on level ground without slope, F4(q)=0. In addition, since A(q,q̇), B(q) is changed by the value of q, we consider the parameter uncertainties or variation of the dynamics of WMRs. AA(q,q) and AB(q) are parameter uncertainties and variation due to the skidding of the WMRs, respectively. The control system satisfies the following properties.
Parameter uncertainties, parameter variation, disturbance of input and the skidding of the mobile robot are regarded as disturbances, as follows:

We can simplify (6) according to (7):

3. Controller design and stability analysis
Given a reference trajectory qr(t) = [xr(t) yr(t) φ r (t)] T generated by a reference robot whose equations of motion are:

where zr = [ν r ω r ] T , ν r is the reference for the forward linear velocity and ω r is the reference for the angular velocity of the mobile robot. A smooth velocity control law zc=fc(Ep,zr,K) is determined by:

where Ep, zr and K are the tracking position error, the reference velocity and the control gain, respectively. Smooth velocity control inputs are designed for the kinematic steering system to make the position error asymptotically stable. Then, we can find the torque input τ(t) that can be computed without measuring velocities, such that z(t) converges asymptotically to z(t) as t → ∞[20].
The tracking error is expressed relative to the local coordinate frame fixed on the mobile robot as Ep=T(qr-q) or:

The error rate becomes:

An auxiliary velocity control input that achieves tracking for the kinematic model (4) with skidding (i.e., with Ep=0, which is uniformly asymptotically stable under the assumption about the reference linear velocity vr > 0) is given by:

where k1,k2,k3 > 0 are the design parameters.
The backstepping control is used to design the controller which is making the error dynamics stable. The control input τ in (8) converts the dynamic control problem into the kinematic control problem.
Step 1. Starting with equation (4), we define a virtual control lawzdes and let ec be an error variable representing the difference between the actual and virtual controls:

In this step, our objective is to design a virtual control law zdes which makes q→0. We can now select an appropriate virtual control zdes which would make the system stabilizable:

where S is not a square matrix so that a dummy term is added to obtain S-1.
Thus, in terms of the new state variable, we can rewrite (4) as:

Consider a control Lyapunov function of (16):

Differentiating (17) and substituting the values from (12) and (13), we get:

This is because the reference linear velocity νvr ≥ 0, V1, is negative definite.
Step 2. We rewrite system in (4) and (8) in the (q,ec) coordinates in which it takes on a more convenient form. Differentiating (14), the equation can be rewritten as:

Function D(x) contains all of the WMRs' unknown parameters, disturbances of input and skidding, etc., and it is regarded as follows:

These quantities are unknown and difficult to determine. Therefore, we apply the Lyapunov redesign technique in which the error dynamics of the overall system are stabilized without the complicated calculations of the unknown terms.
To make the error dynamics stable, the input term in (19) is chosen as

where K is a positive constant.
We can design an additional feedback control ν such that the overall control τ stabilizes the actual system in the presence of the uncertainty. The design of ν is called ‘Lyapunov redesign’.
Substituting (21) into (19), the closed-loop error dynamics can be expressed as:

To implement the control law given by (21), only the values of zc and z c are required without measuring the values of φ and φ. Thus, wheel skidding information is not required to implement this control law. Consider a control Lyapunov function of (22):

Differentiating (23) and substituting the error dynamics from (22), we get:

If V̇2 < 0, the derivative of the Lyapunov function of the system is negative definite. We prove it in theorem 1.
In the new coordinates (q,ec), the system is expressed as:

The system matrix of the resulting system has a negative diagonal.

where:


If V is positive definite and V̇ is negative definite, then the closed-loop error dynamics given by (22) are asymptotically stable with the Lyapunov redesign.

Substituting the values from (12) and (13), we get:

Again, this is because the reference linear velocity vr≥0, V1, is negative definite.
Differentiating (22) and substituting the error dynamics from (18), we get:

Owing to the property 2, the matrix (M̄−2V̄ m )is skew symmetric. We get:


Suppose that we know a Lyapunov function for the nominal model without disturbance; then we have the inequality:

where w = eTcM̄
Let us suppose that inequality (34) is satisfied with ‖·‖2; that is:

where ρ :[0,∞)xD→R, is a nonnegative continuous function and 0 ≤ k0 < 1. The estimation in (35) is the only information we need to have as to the uncertain term D. We have:

Taking
Choosing η ≥ ρ/(1-k0):

Hence, with the control
then V̇ <0. This proves the asymptotic stability of the tracking trajectory of the wheeled mobile robot. It is obvious that V(e)→ ∞ as ‖e‖→ ∞. Q.E.D.
4. Simulation Results
Simulations for the tracking control of wheeled mobile robots are performed to demonstrate the validity of the proposed control law (15) using MATLAB. In most previous studies, simulation works used a straight line or circle path as a reference trajectory. However, a reference path that is an ellipse is more suitable than a strait line or circle path because the reference velocities are usually not constant in practical situations. Therefore, an elliptical reference trajectory is used in our simulations, as given by xr =10cost, yr =6sin t and φ r = tan−1 (ẏr/ẋr). The reference linear and angular velocity is given by:

The trajectory starts from qr(0) = [1 0 π/2 T and the robot's initial Position is taken as q(0) = [1 2 1]T. The parameters of the controller are chosen as k 1 = 1, k 2 = 100, k3=10 and K = diag{10 10}. The parameter values of the WMRs are taken as mc = 30kg, mw=1kg, r = 0.15m, b = 0.15m, d = 0.3m, Ic = 15.625kg·m2, Iw = 0.005kg·m2 and Im= 0.0025kg·m2.
The skidding of the WMRs is unknown, but it is bounded by assumption 1. In this paper, we assume that the wheel skidding is a kind of white noise. When a path following control problem is solved by a GPS-based control scheme for WMRs with wheel skidding in [21], the perturbations computed from GPS measurements have a zero mean, like white noise.
We compare the performance of the proposed controller with that of the feedback controller.
In Fig. 2, the dotted line is a reference trajectory and the red line is the trajectory of the proposed control. The blue line is the trajectory of the feedback linearization control. Fig. 3 shows the position error x and y of the WMRs. The tracking errors are bounded and converge to zero.

Model of the wheeled mobile robot

Trajectory tracking of the wheeled mobile robot
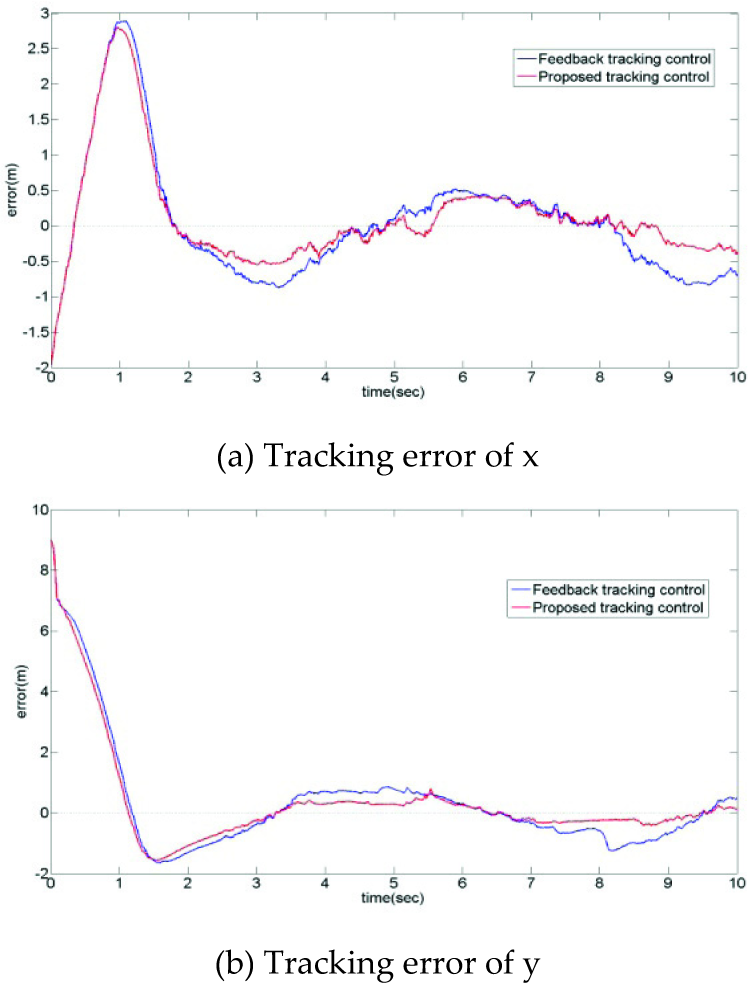
Tracking position error comparison with the proposed controller and the feedback controller
The figures show that the proposed controller has better tracking performance than the feedback linearization controller in elliptical path tracking control. However, because the skidding effects are not impressive in this case, the difference in performance between the proposed controller and the feedback linearization controller is not remarkable. The following simulation results show the robustness of the proposed controller in the situation in relation to effective skidding. The proposed controller shows better tracking performance than the feedback linearization controller.

Trajectory tracking of the wheeled mobile robot

Tracking position error comparison with the proposed controller and the feedback controller
The proposed control method effectively overcomes the skidding and shows robustness in the presence of unknown parameters and disturbances for tracking problems.
5. Conclusions
In this paper, we present a robust controller based on a Lyapunov redesign for a skid-steered wheeled mobile robot. The backstepping method is used to analyse the system and to design the controller thereby making the error dynamics stable. The proposed controller compensates for nonlinear terms such as unknown parameters and skidding, etc. We set up the control input with a Lyapunov redesign to make the system uniformly bounded when vr ≥0. The proposed robust controller using the Lyapunov redesign technique forces the error dynamics to stabilize to the elliptical reference trajectory. We do not need to estimate the proper norm bound to design the robust controller because a stabilizing control input is designed on the basis of a Lyapunov redesign to cancel out the uncertainties and disturbances. It is shown that the designed controller is robust to uncertainty from skidding. Finally, the simulation results show the effectiveness of the proposed controller against unknown disturbances.
Footnotes
6. Acknowledgments
This work was supported by the research grant of the Kongju National University in 2012.