
Abstract
This paper proposes a robust tracking controller based on a Generalized Extended State Observer (GESO) method for a wheeled mobile robot (WMR) with unknown skidding and slipping. Skidding and slipping of a WMR are inevitable in practice. We regard skidding and slipping as disturbances and modify the dynamics model to consider them simply. Then, we adopt the GESO to design a robust tracking controller at kinematic and dynamic level. Using Lyapunov theory, we derive the control law and guarantee the stability of the control system. The proposed control achieves attenuation of the disturbance and convergence of the tracking errors. The performance of the proposed method is verified by some simulation results.
Keywords
1. Introduction
Stabilization of non-holonomic WMRs has attracted much attention due to the inherent nonlinearity in the dynamics of the robot and its usefulness in many applications. Many researchers have developed controllers for tracking and stabilization of non-holonomic mobile robots using nonlinear control techniques such as sliding mode control [1-3], adaptive control [4-7] and backstepping control [8-10], as well as intelligent control based on neural networks [11-13] and fuzzy control [14-17]. Almost all previous papers assume non-holonomic constraints for controlling mobile robots, which are generated by the assumption that the mobile robots are subject to pure rolling without slipping However, since skidding and slipping can happen in various real environments, such as wet or icy roads and under rapid cornering, the non-holonomic constraints can be perturbed.
For this reason, studies of WMRs with skidding and slipping have been carried out for tracking control. The kinematics and dynamics of WMRs with skidding and slipping have been redefined; skidding and slipping are defined by input-additive and unmatched perturbations of the kinematics and dynamics of a WMR [18]. This scheme is verified by GPS-based path-following control, but only uses the kinematics [19]. From a control viewpoint, the peculiar nature of non-holonomic kinematics makes tracking problematic, as feedback stabilization at a given posture cannot be achieved via smooth time-invariant control. So, we need to consider the dynamics to control the movement of the WMR. The dynamics of a robust tracking control approach for trajectory tracking has been studied for unknown skidding and slipping [20]. One previous study [21] showed that the tracking errors converge to an adjustable neighbourhood of the origin regardless of not only large initial tracking errors and input saturation but also unknown skidding and slipping. However, this relied on the assumption of a proper norm bound about disturbances.
Since the dynamics of a non-holonomic WMR show highly nonlinear behaviour, it is difficult to estimate the proper norm bound. The use of a disturbance observer can resolve these difficulties. The disturbance estimation technique is particularly crucial for disturbance attenuation. Disturbance observer based control has the advantage of compensating many uncertainties in control systems, which are unmeasurable.
Proposals have been made previously for methods to estimate disturbance, including the unknown input observer (UIO) [21], the disturbance observer (DOB) [22-24], the perturbation observer [25], the equivalent input disturbance (EID) based estimation [26], and the extended sate observer (ESO) [27-28]. Among these approaches, ESO requires the least amount of plant information [31].
Although extended state observer based control (ESOBC) has made successful achievements in many practical control systems, ESOBC is only available for integral chain single-input-single-output (SISO) systems and matched disturbance. Because WMRs have multi-input-multi-output (MIMO) and mismatched/matched disturbance, we cannot use the ESOBC method [32]. The GESOBC method is proposed in this paper to solve the disturbance attenuation problem of a class of nonintegralchain system with mismatched uncertainties. It is shown that, by properly choosing a disturbance compensation gain, the mismatched uncertainties can be attenuated from the system output. In addition, feasible conditions for extending the proposed GESOBC to multi-input–multi-output (MIMO) systems without any coordinate transformations are also investigated.
In this paper, a GESO-based controller for a wheeled mobile robot in the presence of unknown skidding and slipping is proposed. The proposed method considers not only kinematics but also dynamics. An alternative model is developed for the GESO to design a robust tracking control of WMRs. The proposed method can estimate disturbance and state. Even if skidding and slipping of WMRs are not obtained and states are unmeasured, we can attenuate disturbances such as unknown parameters, input disturbances, parameter variations, and parameter uncertainties caused by the skidding and slipping. Using Lyapunov theory, we derive the control law and prove the stability for the tracking control of a WMR. Finally, the simulation results show the proposed controller offers greater effectiveness than a feedback controller in terms of tracking an elliptical reference trajectory.
This paper is organized as follows: Section 2 presents the modified model and Section 3 describes a tracking problem of a non-holonomic WMR related to skidding and slipping. We describe GESOBC design for WMRs in Section 4. Section 5 presents a stability analysis of the proposed GESOBC. Simulation results of the proposed controller with a WMR are given in Section 6, followed by the conclusion in Section 7.
2. Modified model of a non-holonomic wheeled mobile robot with skidding and slipping
The dynamics of non-holonomic mobile robots with two actuated wheels in the absence of wheel skidding and slipping is generally described by

where q ∈ ℜn are the generalized coordinates, τd ∈ ℜl is the disturbance of an input vector, τ ∈ ℜl is an input vector, λ ∈ ℜm is a vector of constraints forces, M(q) ∈ ℜn×n is a symmetrical and positive definite inertia matrix, V(q,q̇)∈ ℜn×n is the centripetal and Coriolis matrix, G(q) ∈ ℜn is the gravitational vector, E(q) ∈ ℜn×l is an input transformation matrix, A(q) ∈ ℜm×n is a matrix associated with non-holonomic constraints, and l = n – m. We use the definition q = [x y φ θ1 θl]T. The three variables x, y, φ describe the position and orientation of the platform, and the two variables θr, θl specify the angular positions for the driving wheels. We present the mobile robot in Fig. 1 and define the matrices for the wheeled mobile robot as follows
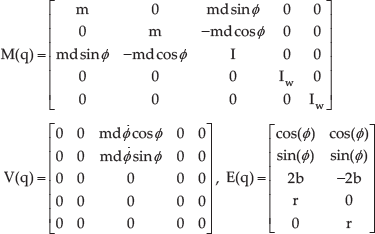
where m = mc +2mw, I = Ic +2mw (d2+b2)+2Im, mc is the mass of the platform without the driving wheels and the rotors of the dc motors, mw is the mass of each driving wheel plus the rotor of its motor, Ic is the moment of inertia of the platform without the driving wheels and the rotors of the motors about a vertical axis through P0, Iw is the moment of inertia of each wheel and the motor rotor about the wheel axis, Im is the moment of inertia of each wheel and the motor rotor about the wheel diameter, P0 is the intersection of the axis of symmetry with the driving wheel axis, Pc is the centre of mass of the platform, dis the distance from P0 to Pc, b is the distance between the driving wheels and the axis of symmetry, and r is the radius of each driving wheel.
In general, a Type (2, 0) WMR is assumed in the literature, i.e., two actuated wheels roll and do not slip. Three constraints are represented as follows:

The first equation in (2) means that the velocity of the centre point of the mobile robot must be in the direction of the axis of symmetry; the second and third equations mean that the driving wheels do not slip. Constraints (2) can be represented in matrix form as follows

where

A matrix S(q) is defined to satisfy A(q)S(q) = 0 as

where S(q) is in the null space of A(q).
However, these constraints are not always satisfied in real operation environments because skidding and slipping can easily occur in various environments, such as wet or icy roads, upon rapid cornering, and so on.
To address this problem, we consider the perturbed non-holonomic constraints with skidding and slipping as follows:

where μ indicates the lateral skidding velocity in mobile robots, which can easily be caused by the centrifugal force generated when mobile robots travel at high speed on a wet or icy road with corners. ζ = [ζr ζl] denotes perturbed angular velocities due to slipping of the two actuated wheels, respectively. These velocities are dependent on wheel and road conditions and may vary with locations. We show the perturbed WMR in Fig. 2.

Model of wheeled mobile robot

Wheeled mobile robot with (a) skidding and (b) slipping
To simplify constraints (5), we can rewrite them in matrix form as follows:

where

where
Remark 1: The kinematic model (7) induced from perturbed non-holonomic constraints is the same as that of Type (2, 0) mobile robots in the presence of skidding and slipping induced from geometric relationships proposed in [18].
Assumption 1 [20]: The perturbations ζv, ζω and φ(q, μ) are bounded as
To derive the dynamics model considering skidding and slipping, we substitute (7) into (1). The dynamics model is then obtained as [20]

where H(q) = (ST(q)E(q))−1ST(q)M(q)S(q), F1(q,q̇) = (ST(q)E(q))1ST(q)(M(q)Ṡ(q) + V(q)S(q)), F2(q) = (ST(q)E(q))-1ST(q)M(q), F3(q) = (ST(q)E(q))−1ST(q)V(q), F4(q) = (ST(q)E(q))−1ST(q)G(q), τ = [τr τl]T are the situated torque as the control input.
We can rewrite (8) as follows:

where A(q,q̇) = -H−1(q)F1(q,q̇), B(q) = H−1(q). We assume that the WMR is operated on ground without any slope, F4(q) = 0. Since A(q,q̇), B(q) is changed by q, which is affected by unknown skidding and slipping, we should consider parameter uncertainties and parameter variation of the dynamics of the WMR. Therefore, (9) is rewritten as follows:

where ΔA(q,q̇), ΔB(q) are parameter uncertainties and parameter variation by skidding and slipping of the WMR.
Property 1: H(q) is a symmetric and positive-definite matrix; H(q) = B̄−1(q)M̄(q),
where M̄(q) = ST(q)M(q)S(q), B̄(q) = ST(q)E(q).
Property 2: Skew Symmetry: The matrix (M̄(q)-2V̄m (q)) is skew-symmetrical, where

Property 3: The disturbances are bounded such that ||τd||≤dB.
Definition 1: Parameter uncertainties, parameter variation, input disturbance, and skidding and slipping of the mobile robot are regarded as disturbances as follows:

Using Definition 1, we can rewrite (8) simply as

where D(zdist) is bounded according to Assumption 1. This form, like (12), has the advantage of easy application of robust control and observer-based control.
To present the main theorem of this paper, we need the following definition and property, reported in [19].
Definition 2: A mobile robot is said to be point controllable if there exists a piecewise continuous input to steer the mobile robot's reference point from an initial point (x(t0),y(t0))to a final point (x(tf),y(tf)) in a finite time interval.
3. Tracking problem for a non-holonomic wheeled mobile robot
First, we determine smooth velocity control inputs to track the reference trajectory and design a torque input to follow smooth velocity control inputs.
A reference trajectory qr(t) = [xr(t) yr(t) φr(t)T is represented by

where zr = [νr ω]T; vr is the reference of the forward linear velocity and ωr is the reference of the angular velocity of mobile robots. A smooth velocity control law zc=fc(Ep,zr,Kc) is determined by

where Ep, zr, and Kc =[k1 k2 k3] are the tracking position error, the reference velocity and the control gain, respectively. We can then find the torque input, which can be computed without measuring velocities such that
Many approaches have been reported in the literature to find the velocity control z(t) for steering systems (9). This is denoted as zc (t). Then, either “perfect velocity tracking” is assumed so that z(t) = zc (t), or a suitable τ(t) for (1) is derived from a specific zc (t) that controls the steering system. The approach assuming “perfect velocity tracking” is unrealistic [24]. To implement the tracking trajectory, we should find the torque input r(t) such that z(t) converges asymptotically to zc(t).
Remark 2 [26]: Smooth velocity control inputs are designed for the kinematic steering system to make the position error asymptotically stable. A suitable τ(t) is derived such that the mobile robot's velocities converge asymptotically to the given velocity inputs.
The tracking error is expressed relative to the local coordinate frame fixed on the mobile robot as Ep =T(qr – q) or

The error rate becomes

An auxiliary velocity control input that achieves tracking for the kinematic model (7) with skidding and slipping, i.e., with which Ep =0 is uniformly asymptotically stable under the assumption vr > 0, is given by

where k1,k2,k3 > 0 are design parameters. If only the kinematic model of the mobile robot (7) with velocity input (17) is considered, and assuming “perfect velocity tracking”, then the kinematic model is asymptotically stable with respect to the reference trajectory (i.e., Ep → 0 as t→∞) [25].
To design the control input and generate the desired velocities zc, the auxiliary velocity tracking error is defined as

Differentiating (18) and using the result in (12), tracking error dynamics of a WMR can be rewritten as

where D(zdist) is an important nonlinear WMR function for skidding and slipping. To track the reference trajectory, we design a control input τ for ec → 0, which means that z(t)→zc(t)as t→∞.
Remark 3: D(zdist) contains the disturbance for skidding, slipping, input disturbance, parameter variation, and all parameter uncertainties such as mass, moment of inertia, and so on. We can expect improved tracking performance by not only attenuating the disturbance but also estimating the linear and angular velocities. This paper applies a GESOBC scheme to estimate the disturbance and linear and angular velocities.
4. Design of generalized extended state observer based control
The configuration of the GESOBC for WMR is shown in Fig. 3. If the state variables are unmeasurable, the estimate of both the disturbance and states can be used for control design.
We rewrite dynamics (12) as follows:

where z ∈ ℜn, τ ∈ ℜm, ym ∈ ℜr and f ∈ ℜq. Bd is the disturbance matrix with dimension n × q. Cm is the output matrix with dimension r × n.
In the framework of GESOBC, an extended variable zn+1 is determined to linearize the system (20) as follow

We can obtain the extended system equation as follows

with variables

Applied using a GESO algorithm, (A,B) has to be controllable and (Ā,C̄m) has to be observable.
For system (22), the extended state observer is designed as follows:

where

where Kx is feedback control gain and Kd is the disturbance compensation gain. If we choose Kx and Kd properly, we can not only estimate a disturbance, but we can also eliminate it for tracking control of a WMR. The proposed controller improves the tracking performance.
5. Stability analysis
In this section, the stability of the system is proved in the form of a proposition. The task of this section is to develop a GESO for WMRs. The proposed control chooses state feedback gain, disturbance compensation gain and observation gain, which are guaranteed to estimate with reasonable accuracy the states and disturbances, and attenuate the disturbances.
We consider a non-holonomic WMR (12) with an unknown bounded disturbance D(zdist) caused by skidding and slipping. To construct a GESO guaranteed to observe an unknown D(zdist) and states, we choose the observation gain L. This is explained in detail in the following theorem.
Theorem 1: Combining (22) and (23), the estimation error equation is given by

where Ao = Ā – LĀm and the observation error is defined as

where P is the unique solution of the Lyapunov equation AoTP+PAo = -Q and Q is a positive definite matrix. Then, (26) is deviated as follows:
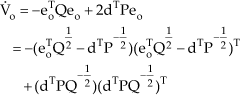
This implies that V̇o < 0 if
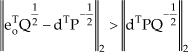
or, equivalently,

The configuration of the GESOBC for a WMR
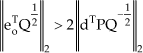
When Q is Identity, V̇ < 0 if

which implies that ||eTo||2 decreases for any eo that satisfies (30) and d is bounded under Assumption 1. Thus, eo is bounded.Q.E.D.
Up to now, we have focused on proving the stability of estimation error eo. If (Ā,C̄m) is observable, we can estimate states and the disturbances using Theorem 1. For the tracking control of a WMR, we attenuate the disturbances caused by skidding and slipping. Compared with the previous disturbance observer (DOB), the GESO has the advantage of minimizing the influence of the disturbance and uncertainty on the output, provided that the disturbance has been estimated. The major concern is whether or not the unknown disturbances are precisely estimated or whether they are observable from the output [32]. Therefore, we can attenuate the disturbance even if skidding and slipping of WMRs are not obtained and states are unmeasured.
However, we cannot stabilize the tracking trajectory to design the GESO using Theorem 1. We need to modify the control law to stabilize the feedback controller for tracking control using the GESO. This is explained in detail in the following theorem.
Theorem 2: Using the non-holonomic system (12) and the feedback control input given by (24), the tracking error dynamics given by (19) are asymptotically stable and the error is bounded with the disturbance compensation gain given by

Kx is chosen to ensure that A – BKx is Hurwitz.

where



where M̄ and P is positive definite matrix and V1 is the Lyanpunov function of position error, V2 is the Lyanpunov function of observation error and V3 is the Lyanpunov function of tracking error.
It is obvious that V > 0.
Differentiating (34), we obtain

Substituting the values from (16) and (17) into deviation of (33), we obtain

Since the reference linear velocity vr ≥ 0, V̇1 < 0.
Using Theorem 1, V̇2 ≤ 0.
Differentiating (35) and substituting the error dynamics from (19), we obtain

where K = [Kx KdT. Owing to the property

Substituting (33) and (41) into (40),

where A – BKx is Hurwitz and eo is bounded, this implies that V̇3 ≤ 0. Thus, if we choose the disturbance compensation gain (31), observation gain L and state feedback gain Kx, V̇ ≤ 0. This proves the stability of the tracking control for a wheeled mobile robot. Q.E.D.
6. Simulation results
The proposed control laws (24) and (31) are verified with a computer simulation using MATLAB. In most studies, the simulation study is carried out using a straight line or circle path as the reference trajectory where the reference velocities are always constant. This is a very rough simplification in comparison to the environment that the WMR will travel through in real applications. Furthermore, the performance of the controller cannot be fully investigated by using such a reference trajectory because the controller does not output any signal after a certain point. An elliptical reference path is more suitable for this purpose where the reference velocities are no longer constant. Therefore, for simulation purposes, an elliptical reference trajectory is taken, given by xr =10cos(t), yr =6sin(t), and φr =tan−1(ẏr/ẋr). The reference linear and angular velocities are given by

The trajectory starts from qr(0) = [10 0 π/2 0 0]T and the robot initial posture is taken as q(0) = [x(0) y(0) φ(0) θr(0) θl(0)]T = [1 2 0 0 0]T. The parameters of the controller are chosen as k1 = 1, k2 = 100, and k3 = 10 to convergence Ep → 0 in [25]. For simulation purposes the parameter values are taken as mc=30kg, mw = 1kg, Ic = 15.625kg · m2, Iw = 0.005kg · m2, Im = 0.0025kg · m2, r = 0.15m, b = 0.15m, d = 0.3m, and −250 < τr, τl < 250. Fig. 4 shows the reference forward linear and angular velocities. We should define vr > 0 for stability of tracking control in (37). The initial observer state is
According to Assumption 1, the skidding and slipping are bounded but the boundary is unknown. During the first operation of the WMR in slippery road conditions, skidding and slipping occur frequently. In this paper, in order to satisfy Assumption 1 and describe a slippery surface, we determine the skidding and slipping as shown in Fig. 5. As Fig. 5 presents, the skidding and slipping are set as oscillating widely from the start to 3 sec.
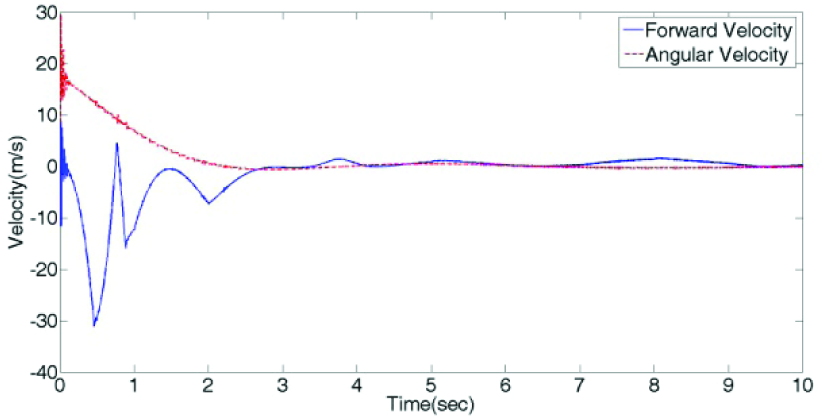
When we determine the skidding and slipping as in Fig. 5, disturbances of forward and angular velocity are shown in Fig. 6. We obtain disturbance estimations using observation gain shown in Fig. 7. As shown in Fig. 8, disturbance estimation errors converge to a sufficient neighbourhood of the origin regardless of not only large initial tracking errors and input saturation but also unknown skidding and slipping.

The reference forward linear and angular velocities

Skidding and slipping velocity of the WMR

Disturbances of forward and angular velocity for skidding and slipping
Disturbance estimations for skidding and slipping
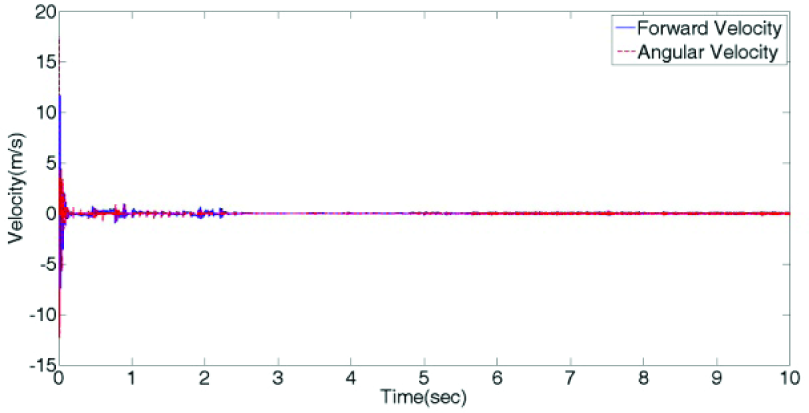
Disturbance estimation errors for forward and angular velocity
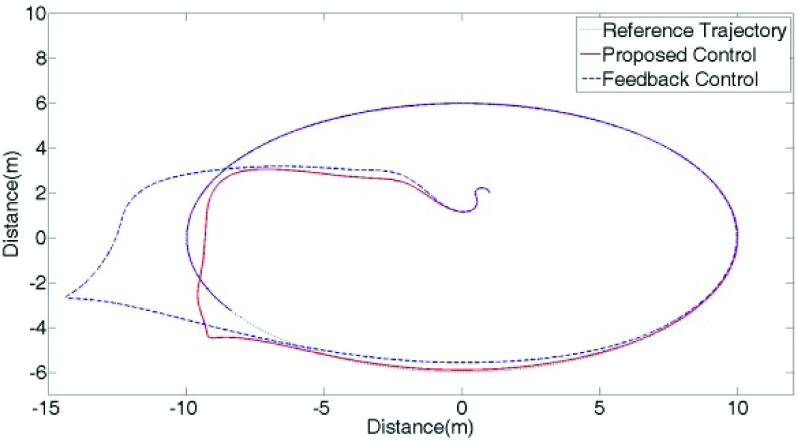
Trajectory tracking of the WMR

Position error comparison of the proposed control and feedback tracking control
An ellipse is used as a reference trajectory to verify the proposed robust controller. We compare the proposed controller with the feedback linearization controller. Figs. 9 and 10 present the tracking control result. From these results, we can conclude that the proposed controller has robustness against unknown skidding and slipping and it is clear that the tracking performance of the proposed controller is better than that of the feedback linearization controller. In other words, the proposed control system can tolerate skidding and slipping effects.
7. Conclusion
In this paper, a GESO-based controller for a wheeled mobile robot in the presence of unknown skidding and slipping has been proposed. The proposed method considers not only kinematics but also dynamics. An alternative model is developed for the GESO to design a robust tracking control of a WMR. The proposed method can estimate disturbance and state. Even if skidding and slipping of a WMR are not obtained and states are unmeasured, we can attenuate disturbances such as unknown parameters, input disturbances, parameter variations, and parameter uncertainties caused by the skidding and slipping. Using Lyapunov theory, we derive the control law and prove that the system is bounded when vr ≥ 0. Finally, from simulation results compared with those of a feedback tracking controller, it has been shown that the proposed controller provides significant tracking performance and robustness against unknown skidding and slipping.
Footnotes
8. Acknowledgments
This work was supported by the GRRC programme of Gyeonggi province. [(GRRC HANKYONG 2011-B01), Development of Transport Equipment for Smart Distribution Centre].