
Abstract
The Delft Institute of Prosthetics and Orthotics has started a research program to develop an improved voluntary closing, body-powered hand prosthesis. Five commercially available voluntary closing terminal devices were mechanically tested: three hands [Hosmer APRL VC hand, Hosmer Soft VC Male hand, Otto Bock 8K24] and two hooks [Hosmer APRL VC hook, TRS Grip 2S]. The test results serve as a design guideline for future prostheses. A test bench was used to measure activation cable forces and displacements, and the produced pinch forces. The measurements show that the hands require higher activation forces than the hooks and 1.5–8 times more mechanical work. The TRS hook requires the smallest activation force (33 N for a 15 N pinch force) and has the lowest energy dissipation (52 Nmm). The Hosmer Soft hand requires the largest activation force (131 N for a 15 N pinch force) and has the highest energy dissipation (1409 Nmm). The main recommendations for future prostheses are the following: (1) Required activation forces should be below the critical muscle force (∼ 18% of maximum), to enable continuous activation without muscle fatigue; and (2) hysteresis of mechanism and glove should be lowered, to increase efficiency and controllability.
Keywords
Introduction
Many patients abandon their upper-limb prosthesis after some time. Studies show rejectionrates varying from 23–45%. 1 Patients are often not satisfied with their prosthesis because it does not fulfil their basic demands. These basic demands can be summarized by the words: Cosmetics, comfort and control. 2 Prosthesis users have a large range of needs and priorities. They often want their prosthesis to be aesthetically pleasing, comfortable to wear all day, easy to don and doff, and intuitive to control without a high mental or physical load. Current prostheses do not fulfil these demands simultaneously.
This study focuses on the control issue. Currently two types of active prostheses are available: The electric prosthesis and the body-powered (BP) prosthesis. 3 The electric prosthesis most commonly uses surface electromyography (EMG) to control the terminal device, but it can also be controlled by using switches or other sensors (myoacoustic, FSR).
The electric prosthesis provides visual feedback and incidental feedback (motor sound, vibration). 4 It does not provide proprioceptive feedback to the user regarding the opening width of the terminal device, the applied pinch force or the external pinch force disturbances. The absence of proprioceptive feedback decreases the speed and accuracy of both fine 5 and gross 6 motor skills. It also reduces the ease of use of the prosthesis. 7,8 The BP prosthesis is most commonly controlled by a Bowden cable anchored to a shoulder harness. Pulling the cable results in closing of the prosthesis in voluntary closing (VC) devices, or in opening in voluntary opening (VO) devices. Cable displacement and cable force provide proprioceptive feedback to the user regarding the opening width and the applied pinch force. 9 A major complaint about this type of control is the physical load imposed on the user. Often large activation forces are required. This results in muscle fatigue, discomfort and irritation, particularly in the axilla when using a shoulder harness. 10,11 To solve one aspect of this problem most VC devices are provided with a locking mechanism. This prevents the user from fatiguing when holding an object for long durations. It also keeps the prosthesis closed while not being used.
The Delft Institute of Prosthetics and Orthotics (DIPO) has started a research program on the development of an improved VC BP hand prosthesis. This prosthesis should require significantly lower physical control effort than commercially available VC BP prostheses. In a first step to this development currently available VC devices for adults were analyzed on mechanical performance properties, as limited data is available on body powered prostheses. LeBlanc et al. performed mechanical tests on child size VO and VC devices. 12 Corin et al. tested adult size VO devices. 13 In both tests a materials testing machine was used. Various parameters were measured, for example maximum opening width, cable excursion, activation force and pinch force. The activation work was estimated by using the averaged slopes of the force-displacement diagrams, but no dissipated work was estimated. No tests were performed on adult size VC devices. Carlson and Long 14 tested one VO and one VC hook. In this test the prostheses were measured as a complete system, wom by a user. The activation force and displacement were measured at the harness; therefore, the measured efficiency of the systems was also dependent of the efficiency of the Bowden cable transmission.
Goal
The goal of this study was to quantify and objectively compare the performance of several commercially available VC upper-limb prostheses. Hand prostheses, as well as hook prostheses were tested. Results of the tests give an impression of the state of the art in the performance of VC prostheses. The obtained values will serve as a guideline for the design of improved VC hand prostheses.
Methods
ISO 2253.2006 section D6.8 describes a test protocol for VC devices. 15 However, the focus of ISO 2253 is primarily on prosthesis safety. Only the recording of the values of the activation force and displacement at which the pinch force reaches 20 N are prescribed. To quantify and compare the performance of the tested prostheses much more parameters were measured in this study:
Mass of the prosthetic device;
Maximum opening width;
Excursion range of the activation cable;
Work needed for closing the device;
Hysteresis of one cycle (closing and reopening);
Work needed for closing the device and pinch 15 N;
Activation cable force needed to generate a pinch force of 15 N;
Generated pinch force at an activation cable force increasing from 0–100 N;
Pinch force drop induced by the locking mechanism.
A pinch force of 15 N was chosen to compare the required activation forces. This force is a bit larger than the 10 N pinch force which is considered to be sufficient for children to perform most tasks of daily living. 16 The amount of work needed to close the prosthesis can be calculated by integrating the required activation force over the path length (cable excursion) over which the force is acting (Equation 1). The amount of work can be graphically displayed as the area below the force-displacement-curve (Figure 1a).

in which: W=Work [Nm]; l=Maximum cable excursion [m]; F(x)=Force as function of cable excursion [N]; and x=Cable excursion [m].
The amount of hysteresis, or dissipated energy, of one cycle is a measure of the (in)efficiency of the prosthesis. The difference between the amount of work required to close the prosthesis (Figure 1a) and the work returned by the prosthesis during reopening (Figure 1b), is defined as the hysteresis (Figure 1c, Equation 2). An efficient mechanism has a low hysteresis.

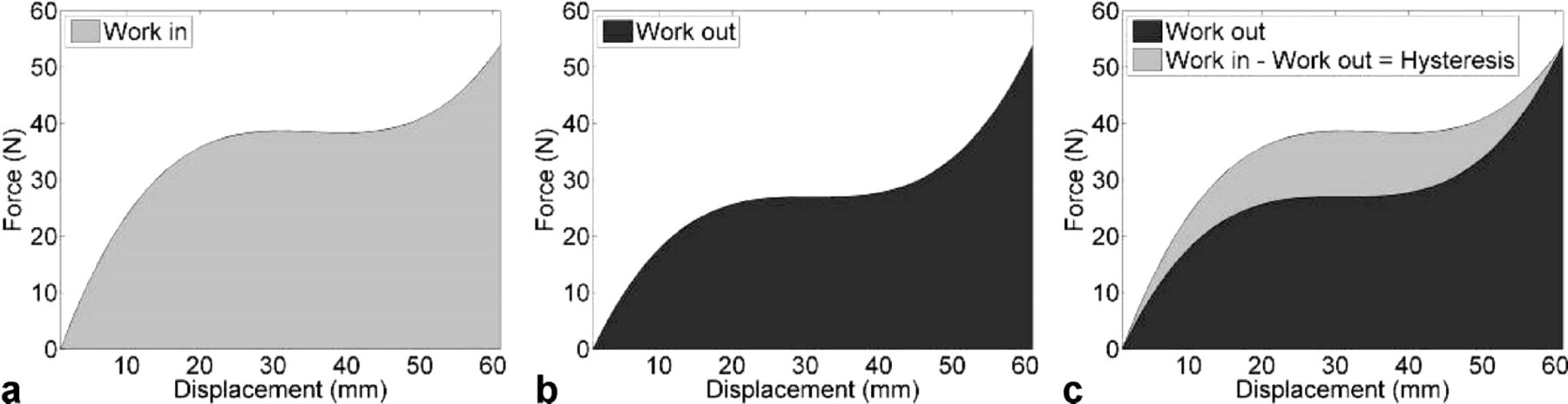
Work can be represented by the area below the force-path-curve. The hysteresis or dissipated energy (c) is the difference between the work done on the system (a) and the work returned by the system (b).
Tested prostheses. All tested prostheses are commercially available VC prostheses (Figure 2). The oldest designs are the ARPL devices, which were developed in 1945. 17 The newest design is the Hosmer Soft hand, which was introduced in 2002. 18 The Lite Touch Adult hand of TRS was not tested. It resembles a hand shaped hook and is not provided with any glove. Therefore its efficiency is expected to be similar to the TRS hook.
This study focuses on the efficiency of the mechanism, rather than on the characteristics of the cosmetic glove. Therefore, the hands were tested without a cosmetic glove. The Otto Bock hand and the Hosmer Soft VC hand were tested with their inner glove applied. The APRL hand has no inner glove. The tests with the Otto Bock hand were repeated with the cosmetic glove and the inner glove applied, to study the effect of the cosmetic glove. The tests were also repeated with the bare frame in order to study the effect of the inner glove. All tested devices were new and previously unused. No adjustments were made to the devices. With the exception for the TRS hook, all tested prostheses have an automatic locking mechanism.
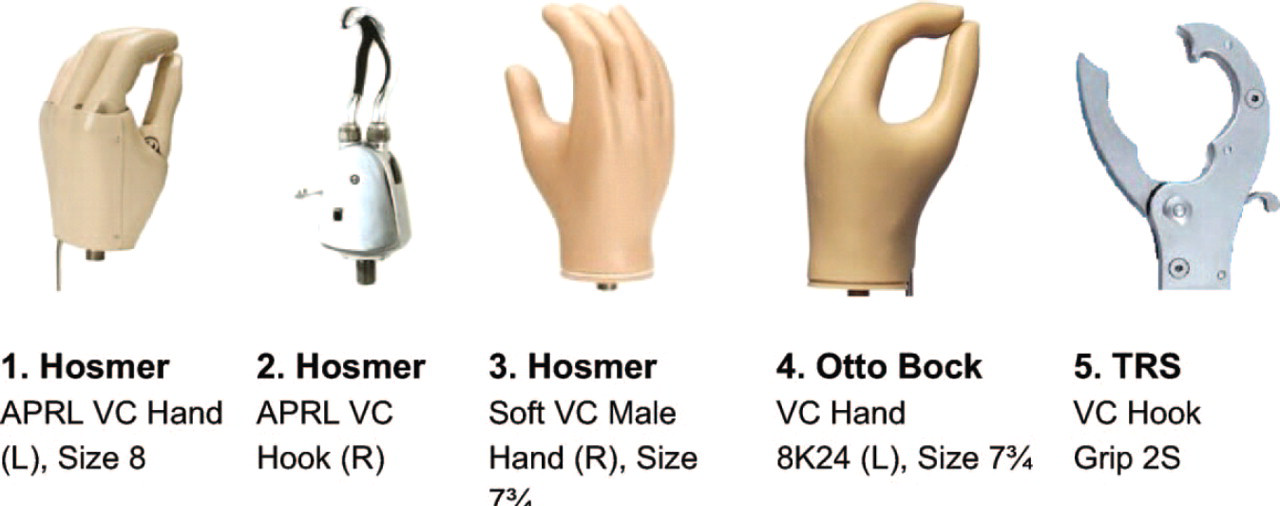
Overview of the tested voluntary closing prostheses: Three hands and two hooks.
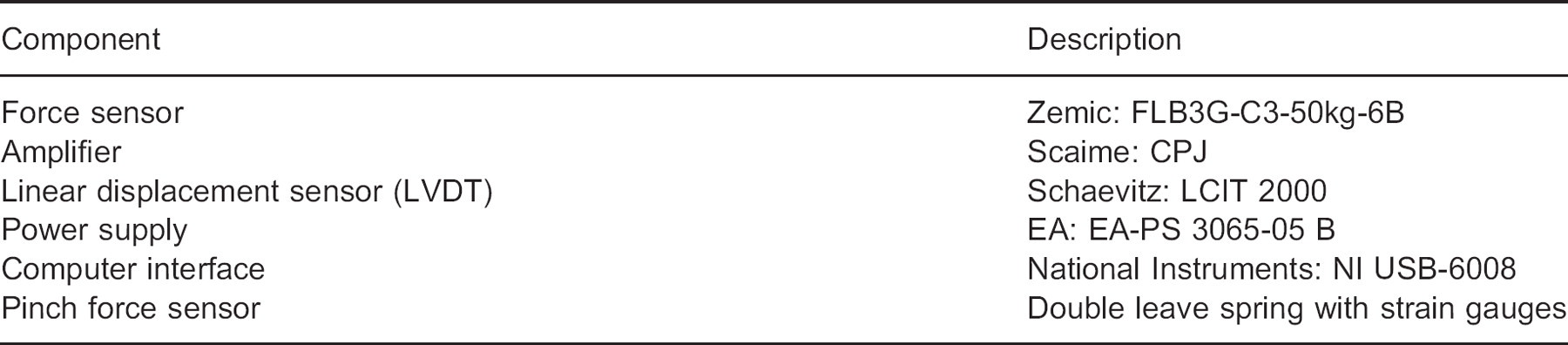
Apparatus and procedure. A custom-build test bench was used to measure the tensile force and the displacement of the activation cable of the prosthesis (Figures 3 and 4). The bench was manually operated. The prostheses were controlled at a low opening and closing speed (fingertip speed about 3 mm/s), to reduce the viscous behavior of the inner gloves and the cosmetic glove. The pinch force applied by the prosthesis was measured using a custom-build pinch force sensor. The sensors were connected to a laptop by a data acquisition interface. All components used are listed in Table 1.
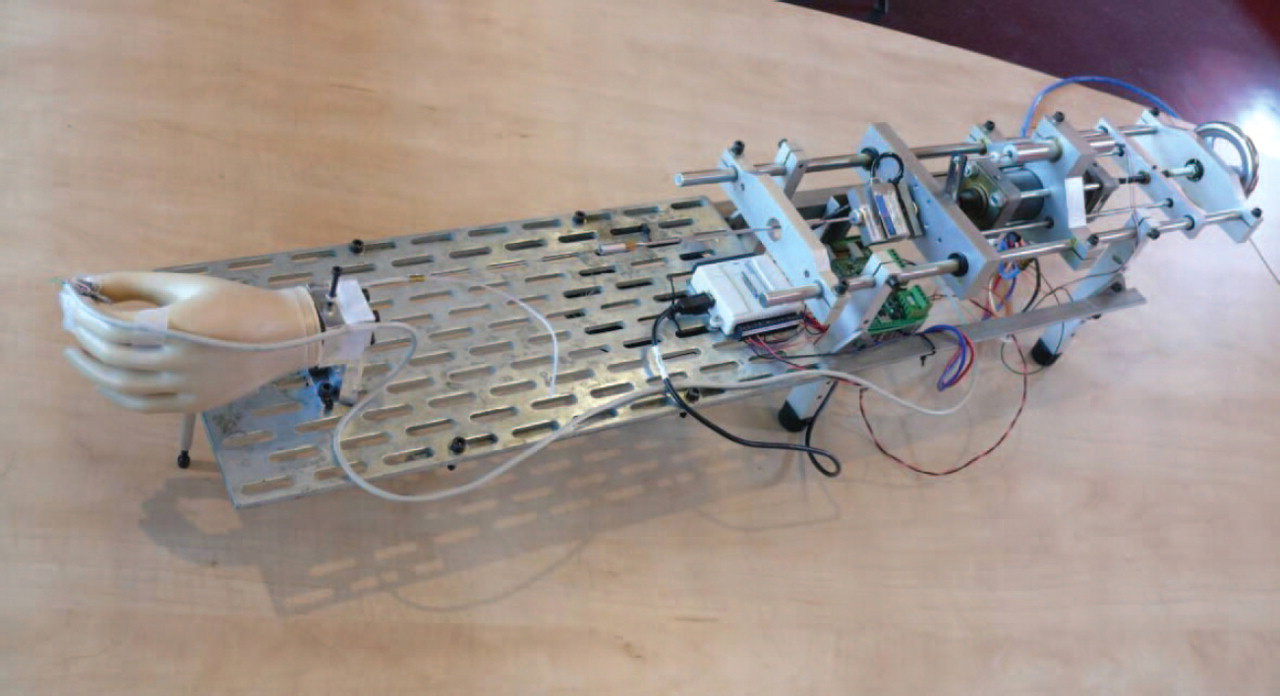
The Otto Bock hand mounted in the test bench. The bench was used to measure the cable force and the cable excursion together with the pinch force produced by the terminal device.
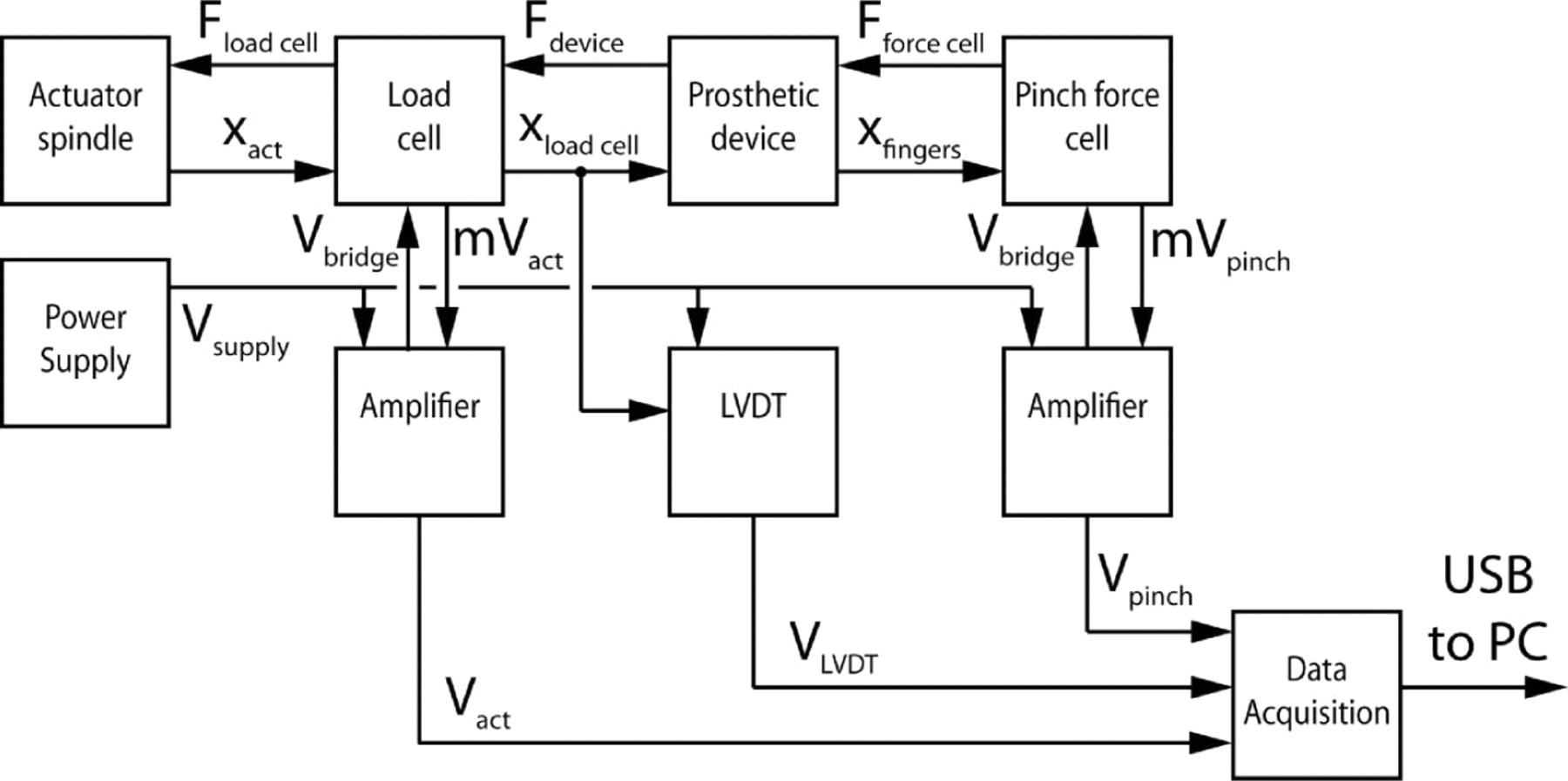
Schematic overview of the test bench. In which F=force, x=displacement, V=volt, mV=millivolt and LVDT=Linear Variable Differential Transducer.
Components used in the test bench.
All devices were subjected to three different tests:
Closing test. A small steel plate (thickness = 1 mm) was placed in between the fully opened fingers (Figure 5.1). The cable was pulled until the prosthesis was closed. Thereafter the cable was released for the first time, thus activating the locking mechanism. The prosthesis was reopened by pulling and releasing the cable for the second time.
Pinch test. The pinch force sensor (thickness = 10 mm) was placed in between the fully opened fingers (Figure 5.2a). The cable was pulled until a pinch force of 15 N was reached. Thereafter the cable was released for the first time, thus activating the locking mechanism. The prosthesis was reopened by pulling and releasing the cable for the second time.
Pull test. The pinch force sensor (thickness = 10 mm) was placed in between the fully opened fingers (Figure 5.3). The cable was pulled until an activation force of 100 N was reached.
The closing and pinch tests were repeated four times for each device, to obtain an average value. The acquired data was processed in MATLAB. 19 Plots were made showing the ‘cable displacement vs. cable activation force’ and the ‘cable activation force vs. pinch force’. The work and hysteresis values were calculated for the last 35 mm of the cable excursion, which is within the range of all devices. This enabled comparison of the different prostheses. The pull test was performed once for each device. One combined plot was made showing the ‘cable activation force vs. pinch force’ of all pull tests.
Testing the locking mechanism. After activation of the locking mechanism, the pinch force drops somewhat. The magnitude of this drop was, where present, obtained from the data of the pinch test. It was used as a measure of effectiveness of the locking mechanism. A larger drop will result in a reduced grip, which means that the locking mechanism is less effective. One supplementary test was performed with the Otto Bock hand, because the results of its locking mechanism showed an unexpected behavior. For this prosthesis, the pinch test was repeated with the inner glove and cosmetic glove applied, while a spring (length = 20 mm, stiffness k = 4 N/mm) was placed between one finger and the pinch force sensor (Figure 5.2b). This test was repeated twice.
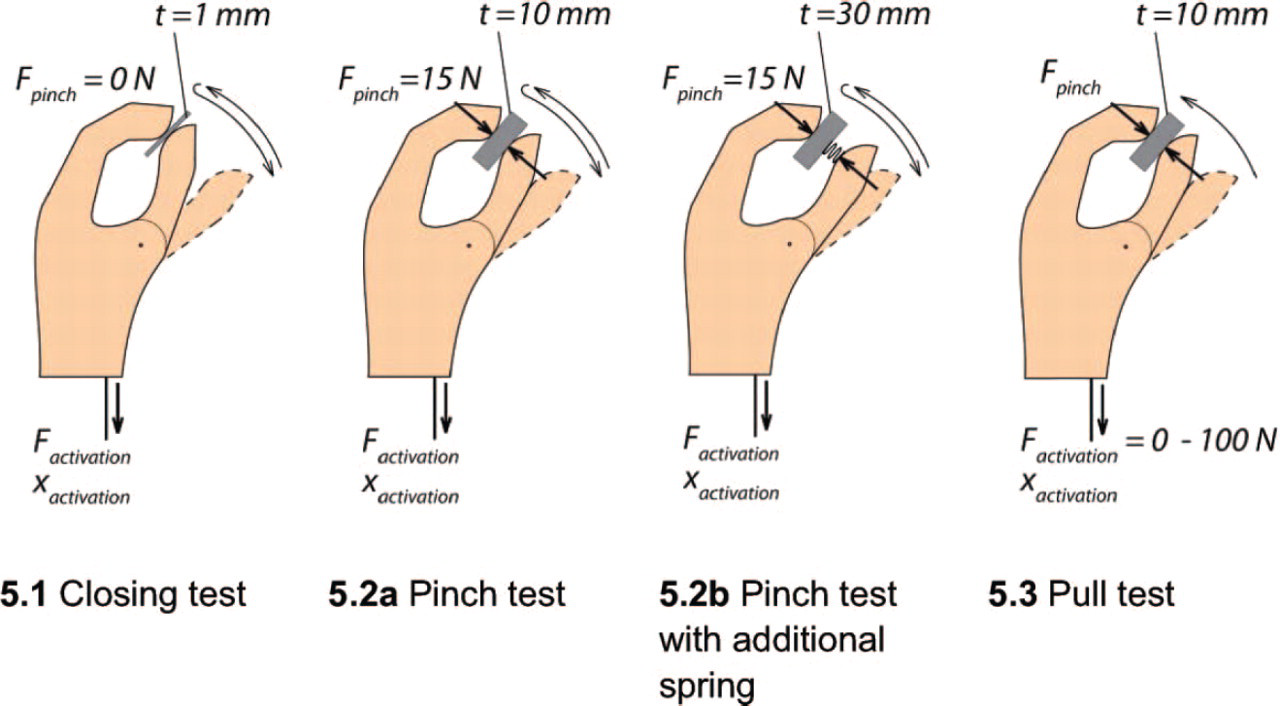
Lay-out of the different tests.
Results
An overview of the geometrical properties and the test results for the prostheses is given in Table II. Notice that the Hosmer APRL hand and hook have two opening spans. The hand has an adjustable thumb, which can be locked in two positions. The hook has a setting in which the maximum opening of the hook is limited.
Closing test. The measured activation cable forces and displacements are plotted in Figure 6. The calculated amount of work needed for closing the hand or hook, and the calculated hysteresis of one cycle of closing and reopening are shown in Figure 7.
Pinch test. The activation cable force required to generate a pinch force of 15 N, varies from 33 ± 0.2 to 131 ± 0.7 N among the different devices (Figure 8). Closing the prostheses entirely, i.e., with no object present, requires a different amount of work than clamping the pinch force sensor (thickness = 10 mm) to a force of 15 N (Figure 9).
Pull test. Figure 10 shows the pinch forces as a function of the activation force for each device. All devices show a linear relation. The minimum required activation force to initiate pinching is different for each device and varies from 10–85 N.
Overview of the geometrical properties and the test results of the tested prostheses.
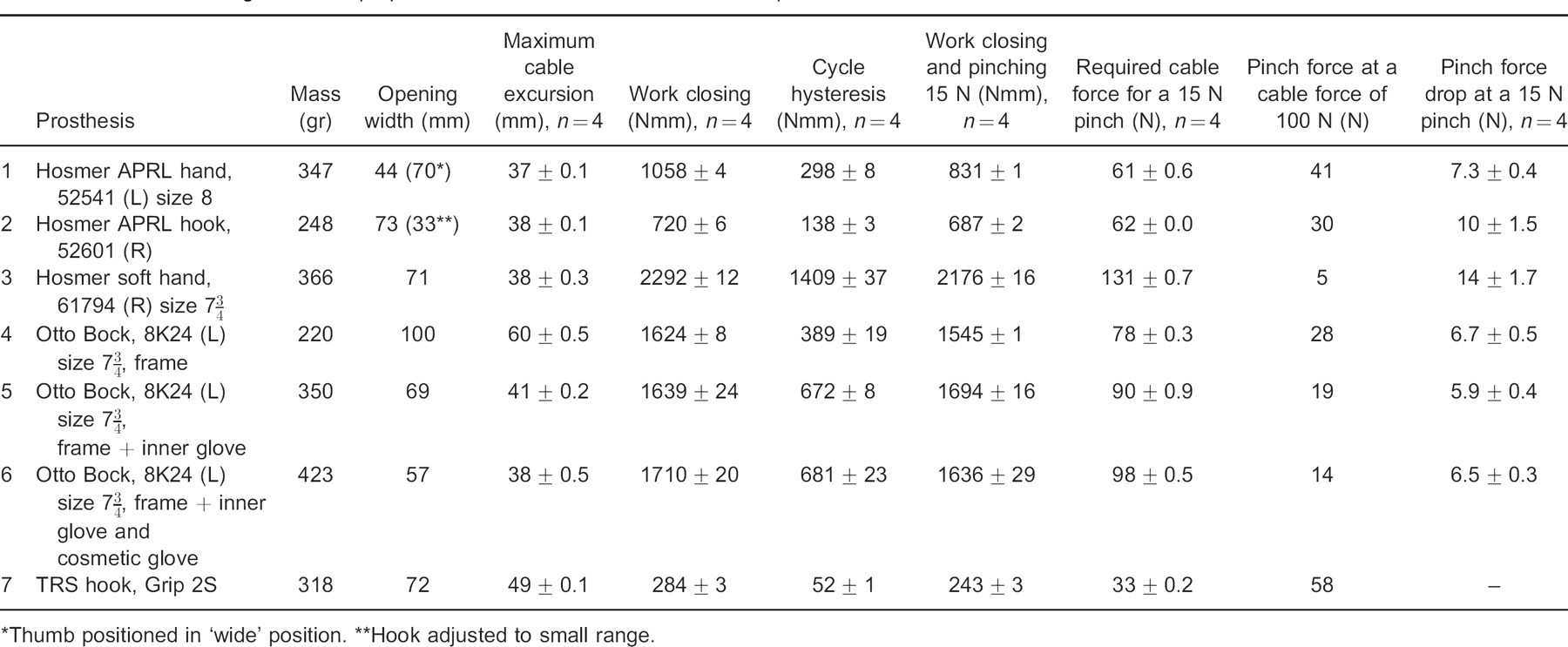
Thumb positioned in ‘wide’ position.
Hook adjusted to small range.
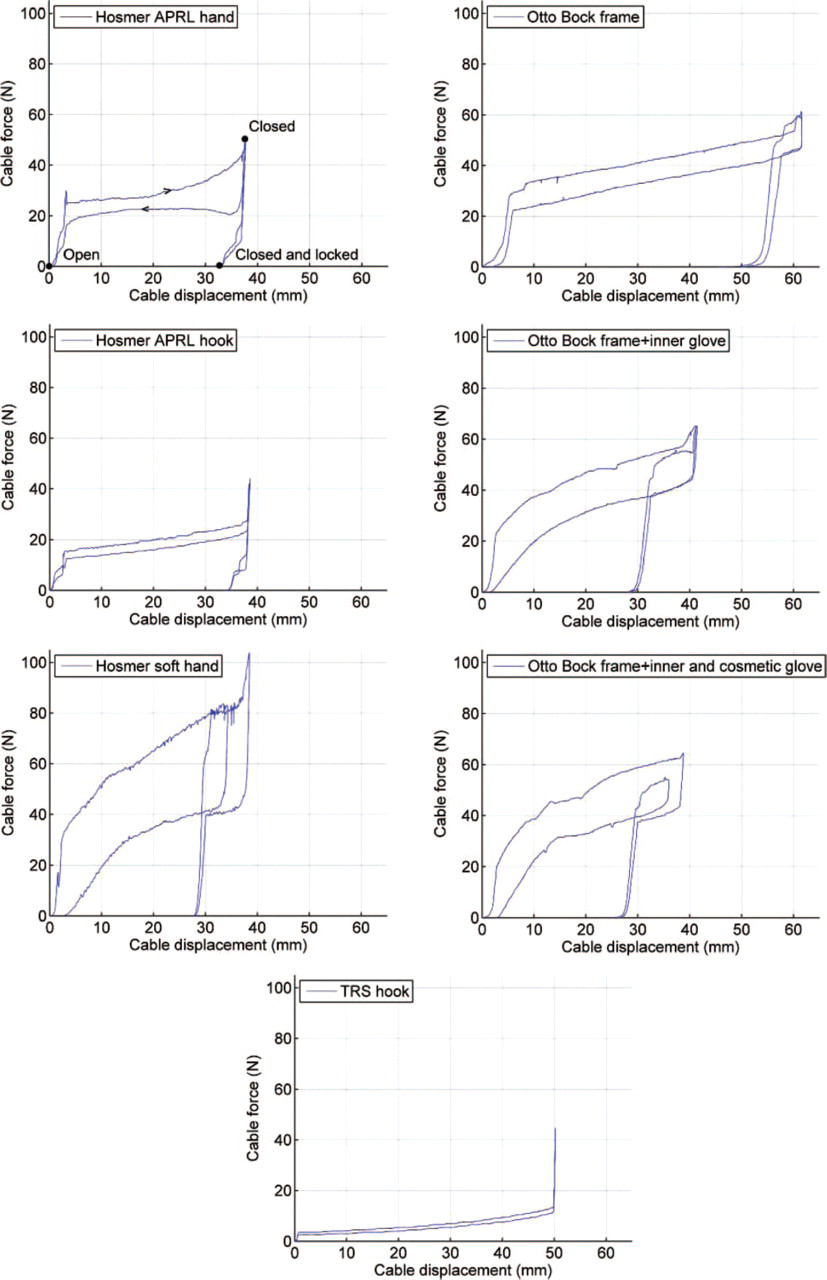
The measured forces at the activation cable as function of the cable displacement, during the closing test. The clockwise cycle starts and ends at 0 mm and 0 N, when the hand is fully open. At the maximum cable displacement and force, the hand is closed.
Locking mechanism. In the devices provided with a locking mechanism, the pinch force drops after the mechanism is activated (Figure 11, 3rd arrow). This drop varies in magnitude from 50–90% of the initial pinch force (∼ 15 N) for the different devices (Figure 12). During deactivation of the Otto Bock locking mechanism, before the cable is released for the second time, the hand opens slightly and the pinch force drops close to zero (Figure 11, 4th arrow). In the supplementary test, in which the Otto Bock hand pinches a spring, the pinch force drops 20% during activation of the locking mechanism. Again, during deactivation the pinch force drops further, close to zero, before the cable is released. No results were obtained from the TRS hook, as it is not provided with an internal automatic locking mechanism.
Discussion
Closing test. The results show that VC mechanical hands require higher activation forces than VC hooks (Figure 8), and require 1.5–8 times more mechanical work (Figure 7). This is in line with previous studies performed on VO devices. 12,13 The energy dissipation in hands is 2–27 times higher than in hooks. The Otto Bock device has a larger hysteresis when the inner glove is applied. Still, without the inner glove applied, the Otto Bock hand mechanism has a larger hysteresis and requires more work than the APRL hand, which has no inner glove. The inner glove also accounts for 30% of the total mass of the Otto Bock hand. In future designs it is recommended to decrease the mass and hysteresis of the inner glove, or abandon its use.
Applying the cosmetic glove on top of the inner glove at the Otto Bock hand gives a small increase of the required work. Remarkably, the amount of hysteresis does not increase significantly. Herder et al. 20 measured cosmetic glove hysteresis values between 30 and 90 Nmm, for a different glove size, by using a different set-up. Possibly the hysteresis of the cosmetic glove is compensated by the behavior of the locking mechanism. The mechanism has a smaller hysteresis loop when the cosmetic glove is applied (Figure 6). The cause of this behavior is unknown.
Pinch test. The difference in activation forces is the largest between the Hosmer Soft hand and the TRS hook (Figure 8). Even without a cosmetic glove, the Hosmer Soft hand requires almost four times more force than the TRS hook, to create a pinch force of 15 N. In most devices, closing the prosthesis entirely requires more work than clamping the pinch force sensor with a force of 15 N (Figure 7). Because of the sensor thickness the fingers do not fully close. Consequently, the considered closing trajectory shifts forward. As a result the opening spring is less loaded, so less work is required. The required extra work to build up the pinch force is relatively low, due to the stiff pinch force sensor. In this case [object size 10 mm; pinch force 15 N] the amount of work ‘gained’ because of the trajectory shift, is larger than the required extra work to apply the pinch force.
Pull test. The minimal force necessary to close the fingers and to start building up a pinch force differs widely among the various devices (Figure 10). The Hosmer Soft hand requires the largest activation force to start pinching (83 N): 7.5 times more than the TRS hook, which requires the lowest force (11 N). The results are in accordance with the outcome of the closing tests and the pinch test (Figures 5 and 8). Carlson and Long 14 measured a 40% lower pinch force at an activation force of ∼ 83 N for the TRS hook (29 N instead of 48 N in the current test). This can
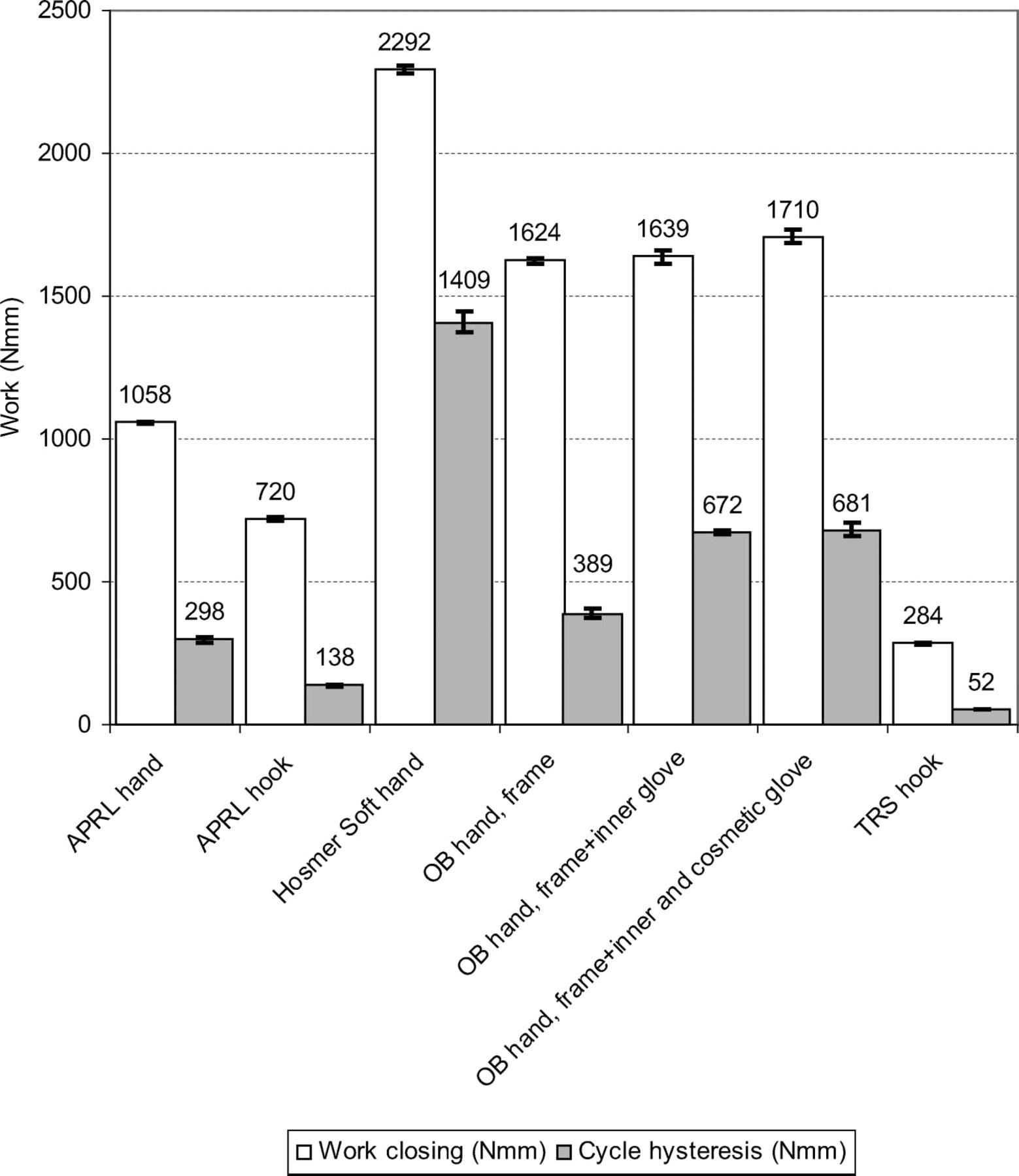
Results of the closing test: The work to close the device is displayed together with the amount of energy dissipated during one cycle of opening and closing.
largely be explained by the inefficiency of the Bowden cable, which was included in their test.
Required activation force. The maximum force that can be generated using a shoulder harness is 280 ± 24 N. 9 Although the measured maximum forces in the pinch test are within this range, some remarks have to be made:
The maximum force, as mentioned in the literature, was obtained by measurements on non-amputees. A study showed that children with a congenital arm defect have much less strength in their arms than typical-bodied children. 21 It is expected that the same is true for adults.
Exerting the maximum force for a longer time is impeded by discomfort, caused by the harness and fatigue of the muscles. A muscle can only be contracted continuously without fatigue when the muscle force is lower than the critical force, which is about 18% of the maximum muscle force. 22 Intermittent contractions, at a work-to-rest ratio of 0.5, can be performed without fatigue at about 38% of the maximum muscle force. Psychophysical aspects of body control, such as maximum comfortable activation force and range, and control accuracy, will be part of future studies of DIPO.
The pinch force of 15 N produced in the test is relatively low. For some activities of daily living a larger pinch force is required (e.g. prehension of a folded sock: 34 N). 23
The Hosmer Soft VC hand and the APRL hand were tested without a cosmetic glove. The required activation force with the cosmetic glove applied is expected to be somewhat larger.
The harness activation force has to be 20–40% larger than the cable force measured in the test, due to the inefficiency of the Bowden cable transmission. 14,24,25
Taking these remarks into account, only the TRS hook can be used without fatigue. With this device it is also possible to produce the largest pinch forces for a given activation force. For the other devices there is a trade-off between the produced pinch force and the duration the force can be maintained. The less efficient the device is, the larger the required activation force must be, and the faster the user gets fatigue. In this respect, the usability of the Hosmer Soft hand will be very limited.
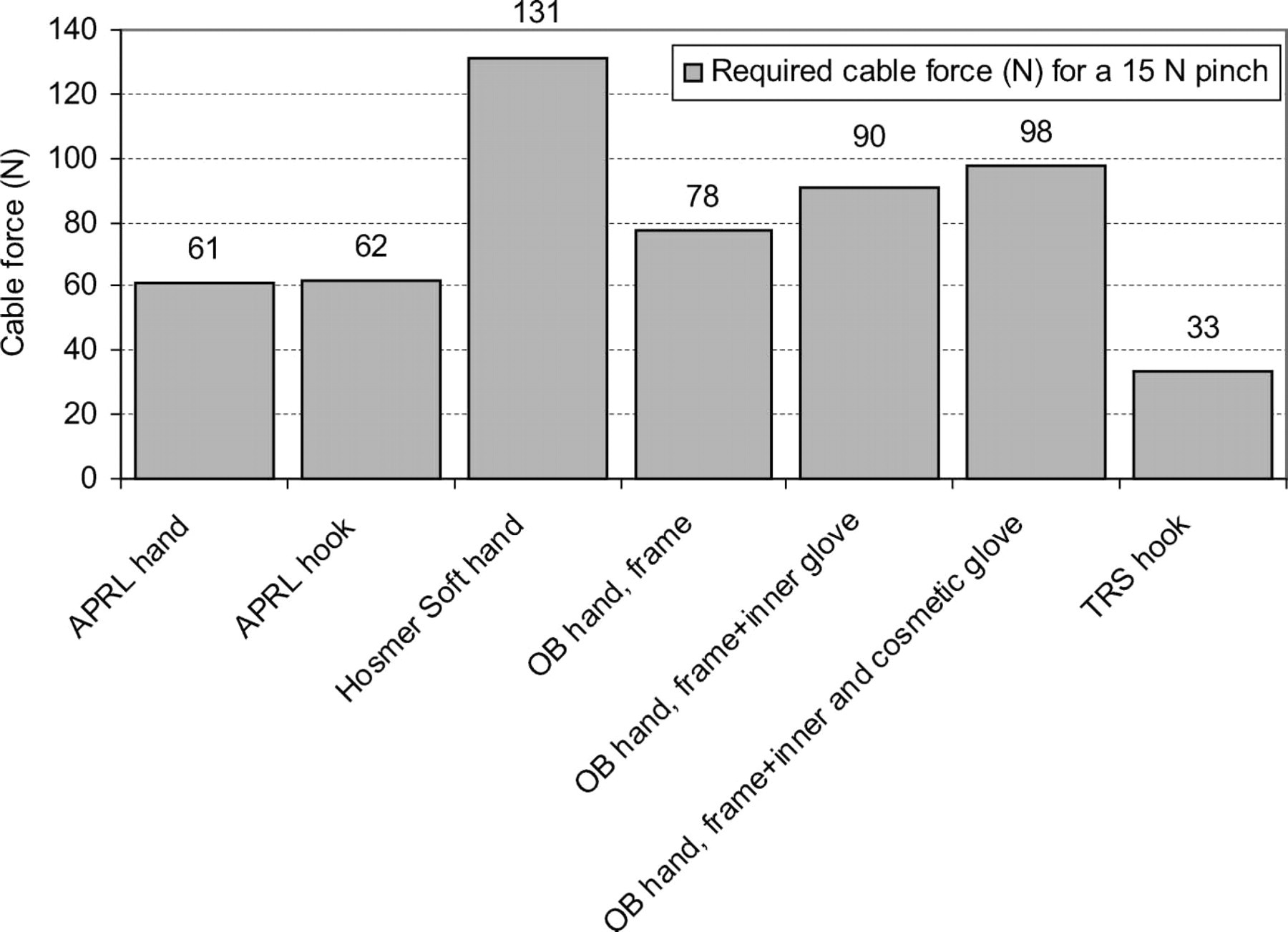
Required cable force (N) to produce a pinch force of 15 N.
Cable excursion
The maximum cable excursion by shoulder control is 53 ± 10 mm. 9 All measured cable excursions are within the average range (Table II). Having a maximum cable excursion of
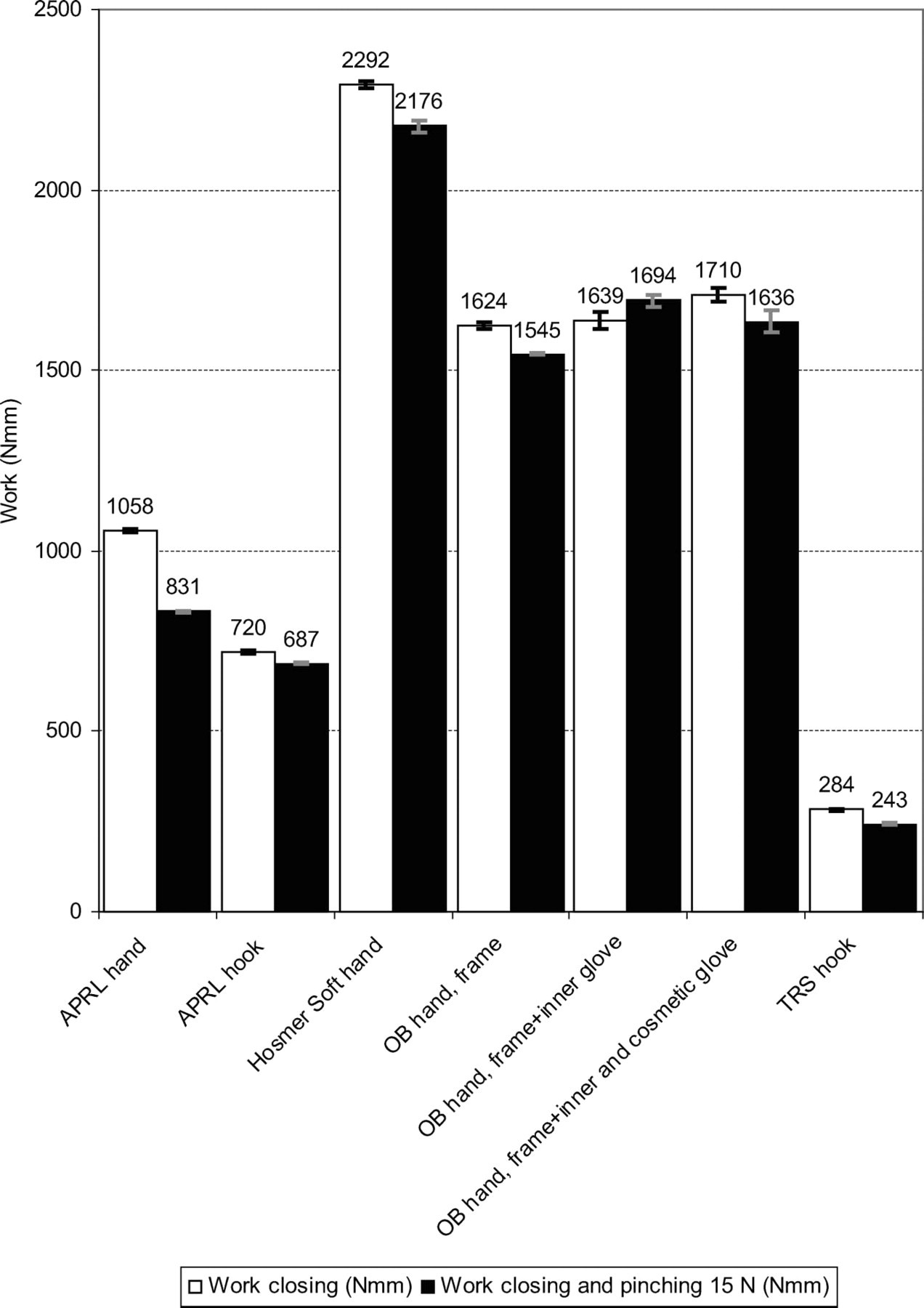
Calculated work required for the closing test and for the pinch test. Closing the prostheses entirely requires a different amount of work than clamping the pinch force sensor (thickness = 10 mm) to a pinch force of 15 N.
49 ± 0.1 mm, the TRS hook is not within the average range minus the standard deviation. A part of the users will not be able to use the full opening range of the hook. The maximum cable excursion of the Otto Bock bare frame is also not within the maximum range. However this is not relevant, as it is never used without both gloves.
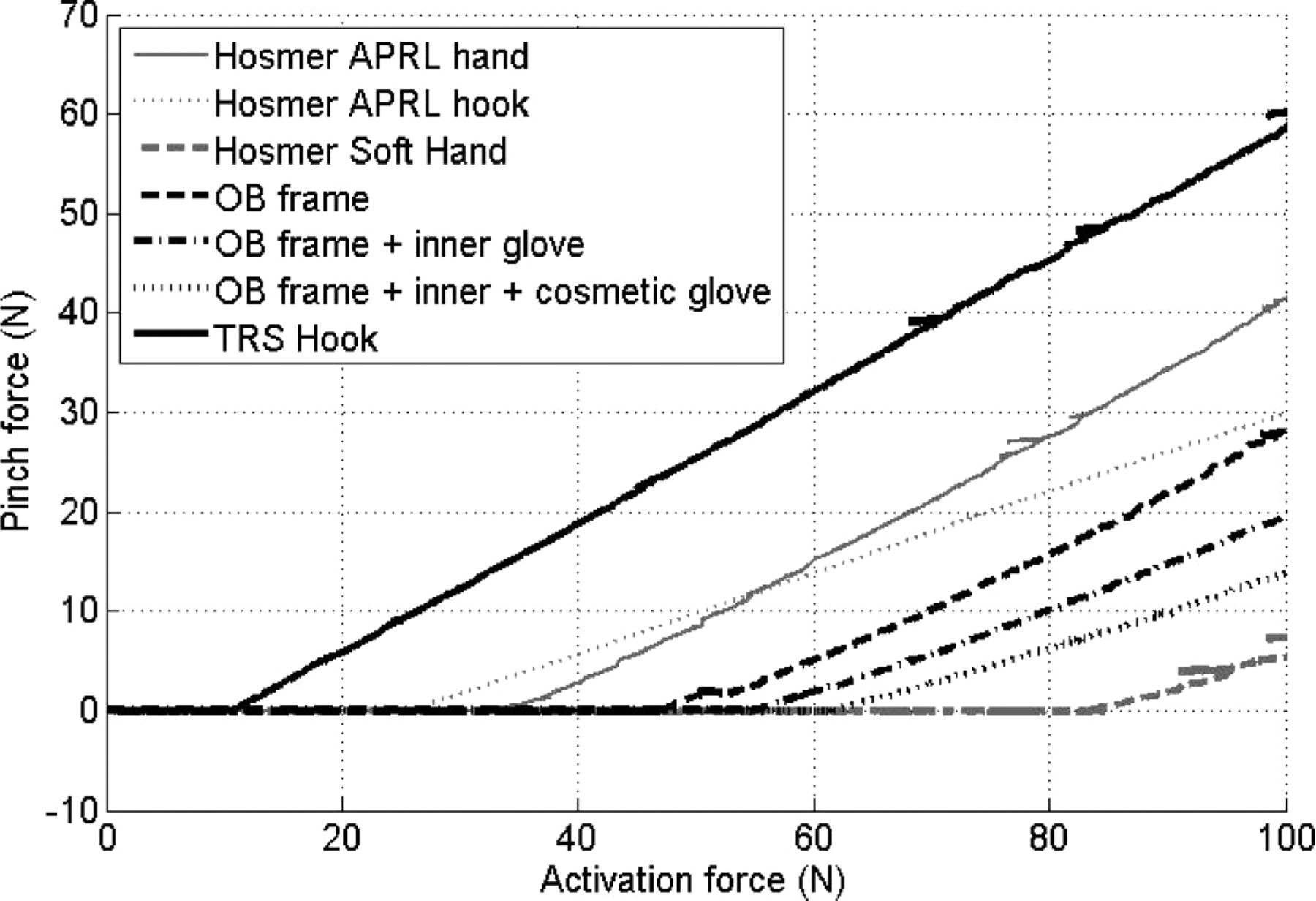
The 0–100 N pull test. The curve is initially horizontal as the activation force increases, while the pinch force remains at zero. When the moving finger touches the force sensor, the pinch force begins to increase along with the activation force.
Locking mechanism. The measured pinch force drops (5.9 ± 0.3 to 14 ± 1.7 N) are relatively high, compared to the initial pinch force of approximately 15 N (Figure 12). To maintain a secure grip after the lock is activated, a larger initial pinch force is required. The maximum producible pinch force is limited by the object strength and by the capacity of the user. Therefore it will often not be possible to hold an object secure using one of the tested locking mechanisms. In future designs the locking mechanisms in all prostheses should be improved to maintain a better grip, or be abandoned to improve the efficiency of the device.
The pinch force sensor used in this study was stiff. Pinching a compliant spring reduces the pinch force drop in the Otto Bock hand from 43 to 19%, which is still quite large. The behavior of the Otto Bock locking mechanism during unlocking is remarkable. When the cable is pulled for the second time, the fingers suddenly open a little and the pinch force instantaneously drops close to zero. During step 4 in Figure 11 it is not possible to control the decrease of pinch force in the Otto Bock mechanism. The pinched object is suddenly released. This behavior was the same for the stiff and the compliant object.
Study limitations. One test was performed with a cosmetic glove applied, to compare the magnitude of the added work and hysteresis to that of the mechanism without one. Mechanic characteristics vary widely among gloves, even for gloves of the same brand and size. 20 To study the effect of a cosmetic glove on a mechanism, multiple tests with different gloves have to be performed. Therefore the effect of the cosmetic glove was left out of the scope of this study. It would be interesting to perform such a study in the future.
All devices were tested using factory settings. The pre-tension of the opening spring in the Hosmer Soft hand is adjustable by disassembling the hand. The spring in the Otto Bock hand can be adjusted by the Otto Bock Service centre. The pre-tension ensures full opening of the device. It has to overcome the hysteresis of the glove plus the friction in the Bowden cable. The pre-tension values in the hands are between 20 and 30 N. The values in the hooks are around 12 N for the APRL hook and around 3 N for the TRS hook. Reducing the pre-tension value of the APRL hook to that of the TRS hook, would reduce its amount of
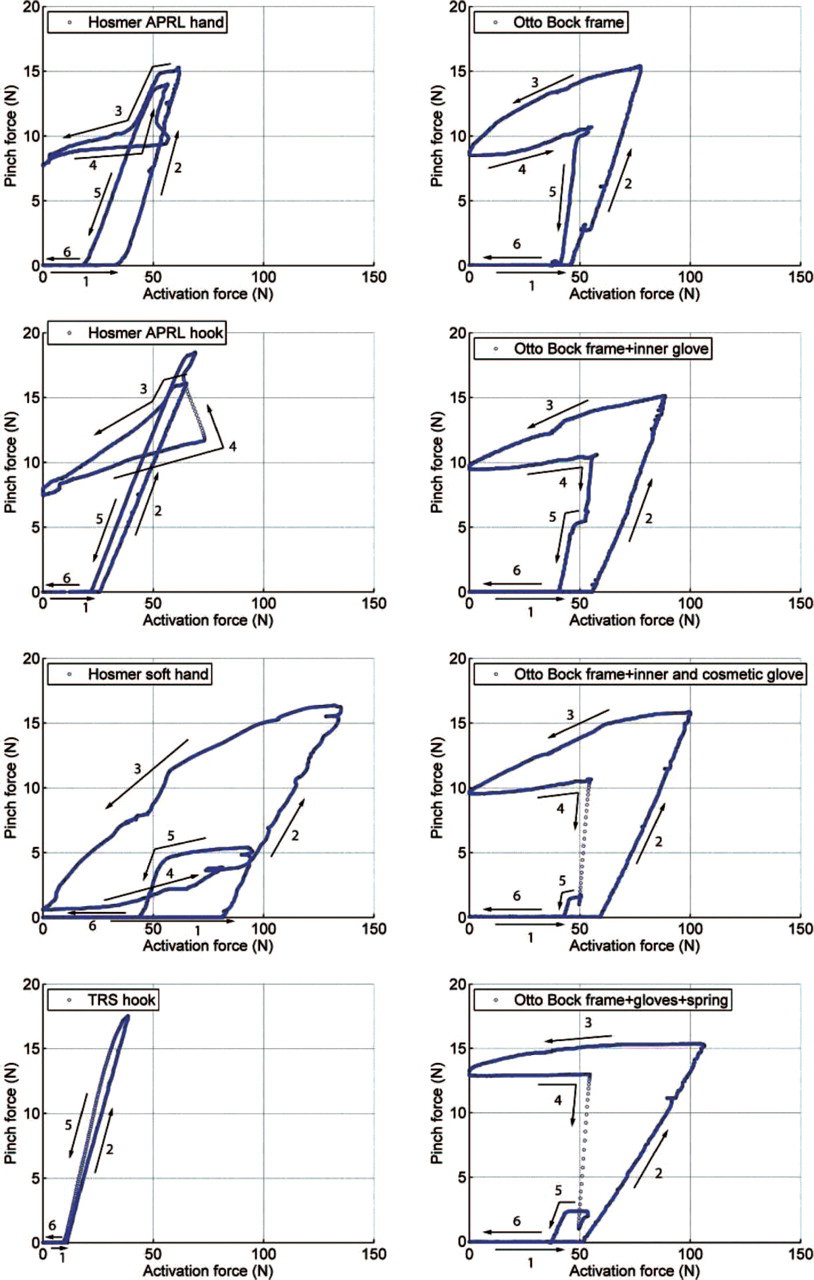
Activation force vs. pinch force-diagrams. Explanation on basis of the Otto Bock hand: 1 First cable pull, the fingers close. 2 Fingers touch the pinch load cell, the pinch load builds up. 3 First cable release, the lock is activated and the pinch force drops. 4 Second cable pull, lock unlocks. 5 Final cable release, pinch load decreases. 6 The fingers open.
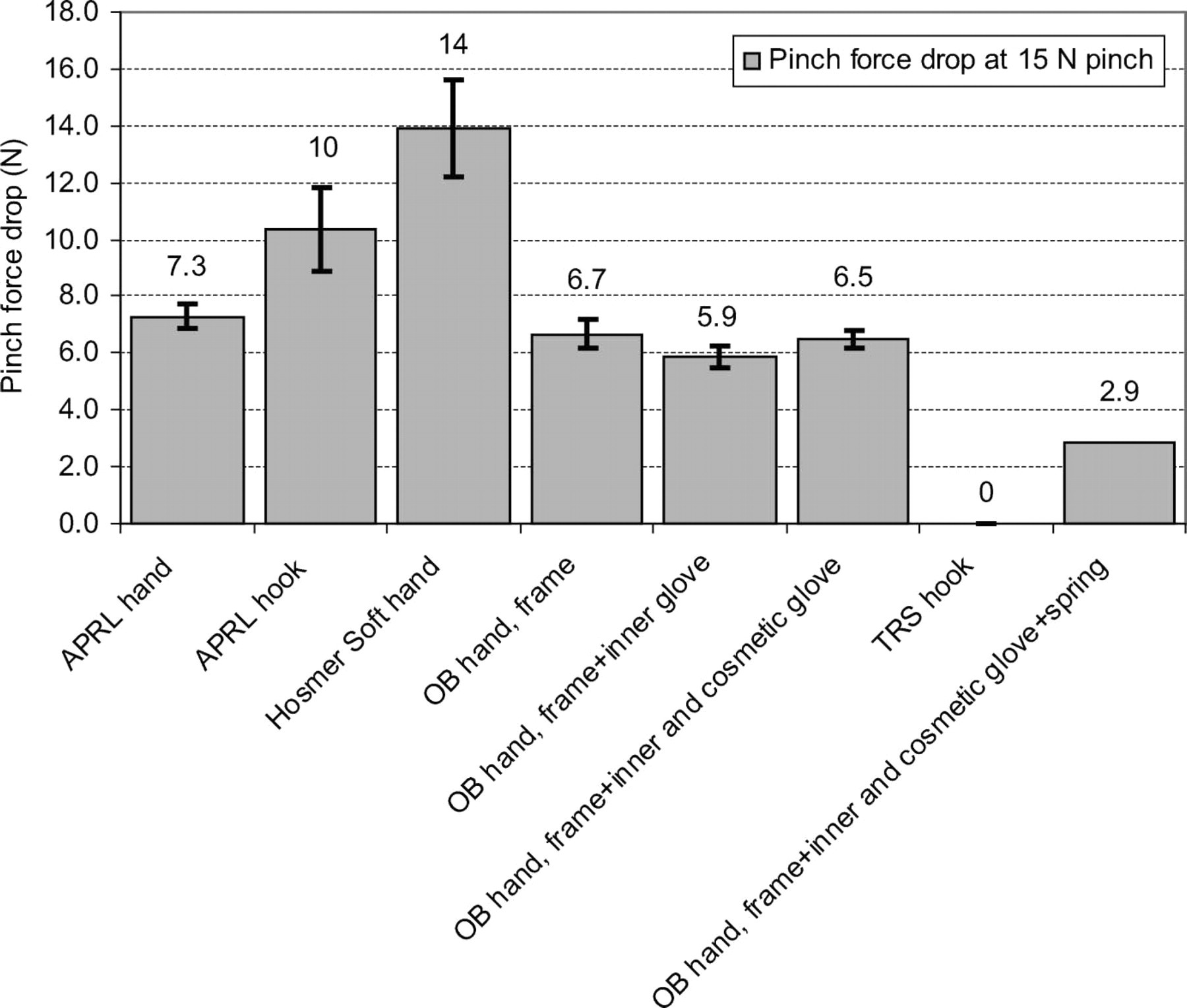
Drop in pinch force, after activation of the locking mechanism at an initial pinch force of approximately 15 N. The TRS hook is not tested, as it is not provided with an automatic locking mechanism.
work by one third. The amount of hysteresis might slightly reduce due to the reduction of internal friction. Reducing the pre-tension in the hands might also be possible. However, this will also result in an undesirable reduction of the maximum opening width, because of the glove hysteresis. It would be interesting to study the effects of the spring pre-tension and stiffness. The spring stiffness can be changed by replacing the spring.
Conclusions
Five VC devices were tested: Three hands and two hooks.
Large differences were observed among the devices. Mechanical hands require 1.5–8 times more mechanical work than hooks. The hysteresis or energy dissipation in hands is 2–27 times higher than in hooks. The TRS hook requires the smallest activation force (33 ± 0.2 N), the Hosmer Soft hand the largest (131 ± 0.7 N). The results are in line with previous studies performed on VO devices.
All measured activation forces are within the maximum range as determined by Taylor. 9 The activation force of the TRS hook is also within the critical force range and can therefore be maintained continually without fatigue. For the other devices the duration over which the pinch force can be maintained is limited by the magnitude of the required activation force, and is dependent on the desired pinch force and the efficiency of the prosthesis.
All measured cable excursions are within the average of the maximum range determined by Taylor. 9 The range of the TRS hook is not within the average range minus the deviation. Therefore a part of the users will not be able to use the full opening range of the hook.
The measured drops in pinch force, after activation of the locking mechanism, are relatively high compared to the initial pinch force (∼ 40–90%). A larger initial pinch force is required to maintain a secure grip after the lock is activated. It will often not be possible to hold a stiff object secure, using one of the tested locking mechanisms. When pinching a compliant spring, the pinch force drop in the Otto Bock hand was reduced, but it remained quite large (19%). Remarkably the Otto Bock hand has a second pinch force drop, directly after unlocking. It is not possible to decrease the pinch force gradually.
The following recommendations can be given for future designs: Activation forces should be lowered within the critical force range, to enable continuous activation without muscle fatigue.
The cable activation range should be within the range of all users, or should be adjustable to each individual user.
Hysteresis of the mechanism and the glove should be lowered, to increase the efficiency and controllability.
The mass and hysteresis of the inner glove should be decreased, or its use should be abandoned.
Locking mechanisms should either be improved or abandoned.
Acknowledgements
We would like to acknowledge Loth Fabenim B.V. for lending us the prosthetic hands and hooks. Also, we would like to acknowledge Otto Bock Benelux and Otto Bock Healthcare GmbH for lending us the Otto Bock hand.
Declaration of interest: The authors report no conflicts of interest. The authors alone are responsible for the content and writing of the paper.