
Abstract
Aggregation is a common behavior by which groups of organisms arrange into cohesive groups. Whether suspended in the air (like honey bee clusters), built on the ground (such as army ant bridges), or immersed in water (such as sludge worm blobs), these collectives serve a multitude of biological functions, from protection against predation to the ability to maintain a relatively desirable local environment despite a variable ambient environment. In this review, we survey dense aggregations of a variety of insects, other arthropods, and worms from a soft matter standpoint. An aggregation can be orders of magnitude larger than its individual organisms, consisting of tens to hundreds of thousands of individuals, and yet functions as a coherent entity. Understanding how aggregating organisms coordinate with one another to form a superorganism requires an interdisciplinary approach. We discuss how considering the physics of an aggregation can yield additional insights to those gained from ecological and physiological considerations, given that the aggregating individuals exchange information, energy, and matter continually with the environment and one another. While the connection between animal aggregations and the physics of non-living materials has been proposed since the early 1900s, the recent advent of physics of behavior studies provides new insights into social interactions governed by physical principles. Current efforts focus on eusocial insects; however, we show that these may just be the tip of an iceberg of superorganisms that take advantage of physical interactions and simple behavioral rules to adapt to changing environments. By bringing attention to a wide range of invertebrate aggregations, we wish to inspire a new generation of scientists to explore collective dynamics and bring a deeper understanding of the physics of dense living aggregations.
Introduction
Collective phenomena exist on a multitude of scales of biology, from cells that assemble into organs (Aman and Piotrowski, 2010; Trepat et al., 2009) to insects that assemble into bivouacs (Kronauer, 2020; Vernerey et al., 2019) to humans who assemble into dense concert audiences (Silverberg et al., 2013). These aggregations perform a variety of functions to benefit their constituent organisms, including maintaining a desirable internal environment despite variable ambient conditions, enhancing locomotion, and avoiding predation (Camazine et al., 2001; Moussaid et al., 2009; Parrish and Edelstein-Keshet, 1999; Sumpter, 2006). The oldest documented animal aggregation, a chain of arthropods, appeared five hundred million years ago during the Cambrian period (Błażejowski et al., 2016; Hou et al., 2008; Vannier et al., 2019). As numerous vertebrate and invertebrate animals evolved over the millennia, aggregations with a variety of shapes, sizes, and behaviors developed (Chandra et al., 2021). Understanding how these aggregations coalesce and behave is an active field of study.
As it would take much more than a single review to discuss all of the collectives of arthropods, worms, fish, birds, and mammals, we limit our focus to “dense” aggregations of invertebrates—where the bodies of the individuals make physical contact with one another. In these aggregations, the members can be tightly packed (e.g., western honey bees forming leg–leg bonds in a swarm (Peleg et al., 2018)) or just barely touching (e.g., whirligig beetles gathering on the water surface (Voise et al., 2011)). In contrast, individuals in sparse aggregations do not physically touch each other and are separated by air or water, such as midges in swarms and birds in flocks (Gray and Denton, 1991; Van der Vaart et al., 2020).
Invertebrate aggregations span a wide range of length scales and consist of dozens to hundreds of thousands of individuals. Hence, an individual inside an aggregation may exchange information with its local environment and neighboring individuals, but it cannot directly interact with individuals far from it in the aggregation. The local response of individuals may propagate within the aggregation, activating dynamical processes (G8) inside the group and leading to the collective response of the entire aggregation. Consequently, this emergent global response leads to changes in the information perceived locally by individuals (Moussaid et al., 2009; Parrish and Edelstein-Keshet, 1999). This feedback loop is a central feature of dense aggregations, as illustrated in Figure 1 using fire ants as a paradigm. Flowchart indicating coupling between the individual organisms, the superorganism, and the environment, using fire ants (Solenopsis invicta) as a paradigm. Individuals (a) sense the local and external environment. They react to it by, for example, pulling on one another through the connection in their legs (b). This results in a collective response in which fire ants resist the aggregation being pulled apart by forming chains of ants pulling downwards (c). The individuals in the aggregation continue sensing mechanical forces and reacting to them until the aggregation breaks or reaches mechanical stability (Foster et al., 2014; Phonekeo et al., 2016). Photograph in (a) by Tim Nowack and David L. Hu. All scale bars are 0.5 cm long.
An aggregation of densely packed invertebrates can have properties of both solid and liquid materials (G29). The analogy between aggregations and viscoelastic (G33) materials is well demonstrated with ant aggregations: linked Argentine ants flow out of a faucet under the force of gravity (G34) (Bonabeau et al., 1998), and a ball of fire ants expands after compression like an elastic material (G9) (Tennenbaum et al., 2016). This connection between animal aggregations and non-living soft materials has been proposed throughout the 1900s. In 1931, W. C. Allee wrote about the many different types of animal aggregations and compared swarms of flying insects to a group of particles undergoing Brownian motion (G5) (Allee, 1931). In 1978, Oster and Wilson hypothesized a connection between liquid flows and social insect behavior (Oster and Wilson, 1978). Since then, investigating the analogy between living aggregations and non-living materials using techniques from soft matter, fluid mechanics, and medical physics has increased in popularity (Camazine et al., 2001; Sumpter, 2006).
In the next sections, we describe the work that has been done on understanding invertebrates from a physics perspective. We describe the functions of aggregations in Section The functions and benefits of aggregations. We then categorize a variety of species that are known to aggregate by the physical properties of individuals in Section Physical properties of individuals and categorize the resulting aggregations by their material properties in Section Physical properties of aggregations. We then present the current literature on the analogies between aggregations as materials and techniques to study their motility in Section Aggregations as active materials and discuss potential areas for further research in Section Discussion. Throughout the text, the reader can refer to the glossary in Section Glossary for definitions of physics terminology.
The functions and benefits of aggregations
In this review, we describe a variety of candidate invertebrate aggregations for physics-based investigation. Countless examples of invertebrate aggregations can be found in entomological journal articles and books such as (Hölldobler and Wilson, 2009) and (Costa, 2006). Out of these, we select sample aggregations with a variety of physical structures for discussion. Out of the countless aggregations that can be found in entomological journal articles and books such as (Hölldobler and Wilson, 2009) and (Costa, 2006), we select sample aggregations that are representative of a variety of resulting physical structures. Unlike liquid crystals (G15) or entangled polymers (G11, G25), aggregations of invertebrates usually form to benefit the constituent individuals. Before delving into the physical properties of these aggregations, we must first understand the functions performed by the aggregations.
Some aggregations are long-term structures that house an entire invertebrate colony. Individuals may leave or join, yet the aggregation remains in place. For instance, giant honey bees build their permanent wax nests suspended outside and covered in layers of bees (Kastberger et al., 2008; Woyke et al., 2016). Similarly, army ants form a bivouac by clinging together with their legs when they are not marching (Kronauer, 2020; Rettenmeyer et al., 2011). The individuals in these aggregations can also deter or kill intruders by forming temporary defensive aggregations, such as eastern honey bees and western honey bees killing wasps and foreign queens, respectively, by covering the intruders in a three-dimensional ball. Balls of honey bees kill an intruding wasp by contracting their flight muscles to generate heat, raising the temperature around the wasp; the mechanism by which western honey bees kill foreign queens is unknown (Gilley, 2001; Ono et al., 1995).
Other aggregations temporarily form to help the individuals survive in and navigate their environments, such as clusters of ladybird beetles, feeding piles of maggots, and entangled worms. An important function of these aggregations is maintaining a comfortable internal environment for the individuals, including temperature and humidity levels (Aydin et al., 2020; Copp, 1983; Heaton et al., 2014; Rivers et al., 2011). Temporary aggregations can help a colony survive and reach a more favorable environment when it is displaced from its home: fire ants aggregate into thin waterproof rafts on water surfaces or towers on vegetation to survive floods (Foster et al., 2014; Phonekeo et al., 2017), and, similarly, western honey bees aggregate into three-dimensional hanging swarms while searching for a permanent nest site (Peleg et al., 2018; Seeley, 2010). Some of these aggregations take advantage of other organisms to travel. For instance, Mojave Desert blister beetle larvae clump on blades of grass to mimic a female bee and parasitize male bees, which carry them to the food stores of real female bees (Hafernik and Saul-Gershenz, 2000; Saul-Gershenz and Millar, 2006; Saul-Gershenz et al., 2018). Aggregations can also travel to more favorable environments by walking or crawling, such as the processions of larvae (Brues, 1951; Lashley et al., 2018; White and Deacon, 2020). Finally, an aggregation made up of a small fraction of a colony can help the entire colony travel over rough terrain, such as marching army ants that link their bodies into bridges across gaps to shorten the path of the other ants (Graham et al., 2017; Reid et al., 2015).
Some invertebrate aggregations, such as fire ant rafts and entangled worm blobs, have recently been investigated from a soft matter standpoint, but many unanswered questions about their behavior remain (Aydin et al., 2020; Deblais et al., 2020; Mlot et al., 2011). Other invertebrate aggregations, such as piles of maggots (Heaton et al., 2014; Rivers et al., 2011) or crawling “mega-larvae” made up of fungus gnat larvae (Brues, 1951; Jones, 1893; Williston, 1894), have been investigated from an entomology viewpoint, but the local behavioral rules and their underlying physics are not well understood. To provide inspiration for studying these aggregations, we will now turn our attention to the existing physics-based investigations, currently available for a limited group of invertebrate aggregations.
Physical properties of individuals
To understand the underlying behavioral physics of an aggregation of invertebrates, we must first understand its constituting individuals, as their physical properties and interactions with their local environment and each other determine the behavior of the aggregation.
The geometry of an individual
The shape and size of aggregating invertebrates affect how they link together to structure their aggregation. We highlight the range of geometries of the 19 invertebrate species under consideration in Figure 2, organized by their aspect ratio (G3) on the x-axis and the length of the individual’s legs relative to body length on the y-axis. Invertebrates known to aggregate, organized by the aspect ratio of the individuals on the x-axis (from individuals that are rounded, like atoms or molecules, to individuals that are long and flexible, like polymers (G25)) and their leg length on the y-axis (from individuals with no legs to individuals with very long legs). The scale bar in each image is 1 mm long. (a). Daddy longlegs (Opiliones: Leiobunum) (Wijnhoven, 2011). (b). Juvenile wolf spider (Pardosa saltans) (Laino et al., 2020). (c). Fire ant (Solenopsis invicta). Photograph by Tim Nowack and David L. Hu. (d). Army ant (Eciton burchellii). Photograph by Daniel Kronauer. (e). Western honey bee (Apis mellifera). (f). Giant honey bee (Apis dorsata) (Kitnya et al., 2020). (g). Japanese honey bee (Apis cerana japonica) (Yokoi, 2015). (h). Ladybird beetle (Harmonia axyridis) (Goetz, 2008). (i). Whirligig beetle (Gyrinidae: Dineutus sublineatus) (Lin and Strausfeld, 2012). (j). Blister beetle larva (Coleoptera: Meloe) (Topitzhofer et al., 2018). (k). Spitfire sawfly larva (Symphyta: Hemichroa crocea) (Boevé, 2015). (l). Pine processionary caterpillar (Thaumetopoea pityocampa) (Battisti et al., 2015). (m). Darkwinged fungus gnat larva (Sciaridae: Bradysia odoriphaga) (Shi et al., 2017). (n). Fruit fly larva (Drosophila melanogaster) (Agianian et al., 2007). (o). Blow fly larva (Calliphoridae albiceps) (Szpila, 2009). (p). Black soldier fly larva (Hermetia illucens) (Shishkov et al., 2019). (q). Caenorhabditis elegans worm (Corsi et al., 2015). (r). Sludge worm (Tubifex tubifex) (Deblais et al., 2020). (s). Blackworm (Lumbriculus variegatus). Photograph by Yasemin Ozkan Aydin and Saad Bhamla.
Investigations of granular mechanics (G12) and liquid crystals (G15) reveal that densely packed elongated particles tend to align with one another. How they align depends on particle geometry, activity, and packing density. Particles with low aspect ratios or a low packing density result in an isotropic, or disordered, packing structure (G14). When the packing density of the particles reaches a threshold, particles with higher aspect ratios align with one another in nematic or smectic phases (G18, G28) and can even form a helical structure in a cholesteric phase (G6) (Bolhuis and Frenkel, 1997; Marchetti et al., 2013; Ramaswamy, 2010).
Some arrangements of invertebrates in aggregations are analogous to liquid crystal phases, with individual aspect ratio as a key parameter. The ladybird beetle (Harmonia axyridis) and whirligig beetle (Gyrinidae) shown in Figure 2(h) and (i) are round with an aspect ratio of less than 2, and their aggregations are likely to be isotropic. On the other hand, blister beetle larvae (Meloe sp.), sawfly larvae (Symphyta), and processionary caterpillars (Thaumetopoea pityocampa and other Lepidoptera caterpillars), as in Figure 2(j)–(l), and fly larvae (Diptera), as in Figure 2(m)–(p), are longer, with an aspect ratio close to 5, and thus are more likely to align with one another into a nematic phase.
If particles are long and flexible, they can wrap around one another and entangle (G11), as is often seen with polymers (G25) (Watanabe, 1999). For a living example of entangled polymers, we can consider the worms in Figure 2(q)–(s) (Caenorhabditis elegans, Tubifex tubifex, Lumbriculus variegatus). These worms are long, with an aspect ratio greater than 10, and also flexible, as shown by the U-shape of the sludge worm and blackworm in Figure 2(r) and (s). These worms can wrap their bodies around each other to entangle instead of aligning in an aggregation.
In addition to the body aspect ratio, the leg length of individuals (and whether they have legs at all) can impact the resulting aggregation. Invertebrates that do not have legs, such as fly larvae and worms in Figure 2(m)–(s), or that have short legs, such as the beetles in Figure 2(h)–(j), sawfly larvae in Figure 2(k), and caterpillars in Figure 2(l) align or entangle with one another to aggregate. In contrast, the connections between invertebrates that can grip each other with claws or adhesive pads on their legs (Foster et al., 2014), such as the fire ants (Solenopsis invicta) and Eciton army ants (Eciton burchellii) in Figure 2(c) and (d), and western honey bees, Giant honey bees, and Japanese honey bees (Apis mellifera, Apis dorsata, Apis cerana japonica) in Figure 2(e)–(g), are not limited to the geometry and flexibility of their bodies. Strong leg–leg connections, such as bonds between fire ants that can bear 400 ant weights, can give more structure to an aggregation than merely the friction of animals on one another in a pile (Mlot et al., 2011). Meanwhile, arthropods such as daddy longlegs (Opiliones) and juvenile wolf spiders (Lycosidae) as in Figure 2(a) and (b) resemble a star polymer (G30) (Ren et al., 2016) with their relatively long legs; how these legs affect the structure of their aggregation is not well understood.
The behavior of an individual
The phases of alignment between particles in an inactive granular material (G13, G12) depend on the temperature of the particles as well as the packing density and aspect ratio. In general, increasing the temperature (and, by proxy, the random motion of the particles), tends to decrease the order in the system (G20) and change the phase of the system from nematic and smectic phases to isotropic (Bolhuis and Frenkel, 1997; Cladis, 1975). Adding directed activity by giving the particles an internal source of energy that propels them in some direction (G1) adds new options for ordered phases. The options for activity-induced order include particles that only move in one direction aligning along their direction of motion in a polar state (G21, G22), and particles that can move forward and backward aligning in a nematic state (G2) (Marchetti et al., 2013). The activity of invertebrates can cause them to arrange into these states; however, their motion can also deviate from self-propulsion in one direction, leading to even more possible states.
The interactions of invertebrates with one another and with their environment determine how they use their physical properties to aggregate. In species with complex social dynamics, the caste of the individuals affects whether an aggregation forms. For example, honey bee swarms are made up of a queen and several thousand workers (Peleg et al., 2018). In non-eusocial insects such as fly larvae or sawfly larvae, age or larval stage might similarly affect whether individuals aggregate (Fletcher, 2007; Shishkov et al., 2019).
How individuals respond to their environment can induce or suppress aggregation. Sometimes, the same stimulus can result in the formation of one type of invertebrate aggregation, and the dissolution of another.
Many invertebrates prefer dimly lit environments, but the reactions of different invertebrate species to light are vastly different. Bright light disrupts the foraging and feeding aggregations of fruit fly, sawfly, and black soldier fly larvae, leading them to individually seek shelter. Red or infrared light, which fly larvae, sawfly larvae, and many other insects are less sensitive to, is necessary to observe these aggregations (Fletcher, 2007; Keene and Sprecher, 2012; Shishkov et al., 2019). In contrast, blackworms entangle into clumps when their environment is brightly lit to hide individuals inside the mass of worms (Aydin et al., 2020).
The aggregations of aquatic invertebrates are influenced by water chemistry. For instance, decreased oxygen concentration slows down C. elegans individuals, causing them to aggregate (Demir et al., 2020; Sugi et al., 2019). On the other hand, sludge worm aggregations help limit the exposure of the worms inside to toxic dissolved oxygen in the water (Deblais et al., 2020). Other chemicals added to the water are absorbed through the skin of the invertebrates in it and can change their behavior. For example, adding alcohol to water containing sludge worms results in decreased worm activity (Deblais et al., 2020). Finally, aggregating can help aquatic individuals survive in dry environments, such as blackworms that entangle to prevent desiccation (Aydin et al., 2020).
Food is another powerful motivator for aggregation. The presence of food can cause fly larvae and other invertebrates to aggregate while feeding, while the lack of food in the environment sometimes results in foraging aggregations, such as caterpillar processions, traveling piles of maggots, sawfly larvae, or fungus gnat larvae, and army ant bridges (Brues, 1951; Fitzgerald, 2003; Jones, 1893; Reid et al., 2015; Shishkov et al., 2019; Sutou et al., 2011; Uemura et al., 2020; White and Deacon, 2020; Williston, 1894).
Finally, invertebrates are primarily ectothermic, and aggregating can help them maintain a comfortable temperature. There are many documented examples of aggregations of bees, ants, ladybird beetles, daddy longlegs, and wolf spiders thermoregulating for the comfort of the individuals inside (Baudier et al., 2019; Coddington et al., 1990; Copp, 1983; Cully and Seeley, 2004; Franks, 1989; Machado et al., 2002; Peters et al., 2021).
These environmental factors cause invertebrates with similar aspect ratio and leg type to create vastly different aggregations, which we discuss in Section Physical properties of aggregations and Aggregations as active materials.
Physical properties of aggregations
The physical and behavioral differences in the invertebrates described in Section The functions and benefits of aggregations result in a diverse variety of aggregations. In this section, we first review aggregations by how the individuals are connected in Figure 3, from entanglement to surface contact. We then review aggregation geometry by the aspect ratio and dimensionality in Figure 4, similarly to the organization of individuals by aspect ratio and leg length. These categorizations help understand the behavior of the dense invertebrate aggregations presented in Figure 2 as materials. (a) Close up of entangled sludge worm blob (Deblais et al., 2020) (b). A chain of bees linked to each other with their legs (c). Side view of a pile of black soldier fly larvae against the side of a container (Shishkov and Hu, 2020). The scale bar in each panel is 1 cm long. Characteristics of aggregations of invertebrates. We organize aggregations by aspect ratio on the x-axis and dimensionality (from a one-dimensional linear procession to three-dimensional balls and clusters) on the y-axis. Black scale bars are 5 cm long, red scale bars are 0.5 cm long. (a). Blackworm (Lumbriculus variegatus) blob (Aydin et al., 2020). For video, see Supplemental Video S1. (b). Sludge worm (Tubifex tubifex) blob (Deblais et al., 2020). (c). Western honey bee swarm. (Apis mellifera) (Peleg et al., 2018). (d). Japanese honey bee (Apis cerana japonica) heat ball (Ono et al., 1995). (e). Blister beetle larvae (Meloe franciscanus) clumped on a stem (Saul-Gershenz and Millar, 2006). (f). Fire ant (Solenopsis invicta) tower (Phonekeo et al., 2017). (g). Army ant (Eciton burchellii) bivouac. Photograph by Daniel Kronauer. (h). Army ant (Eciton burchellii) bridge (Reid et al., 2015). For video, see Supplemental Video S2. (i). Black soldier fly larva (Hermetia illucens) pile (Shishkov et al., 2019). (j). Sawfly larva (Symphyta) aggregation. Frame from video by David Yeates. For video, see Supplemental Video S3. (k). Giant honey bee (Apis dorsata) swarm (Kastberger et al., 2014). For video, see Supplemental Video S4. (l). Fire ant (Solenopsis invicta) raft (Mlot et al., 2011) For video, see Supplemental Video S5. (m). Juvenile wolf spiders (Lycosidae: Pardosa saltans) on their mother’s back (Trabalon et al., 2018). (n). Ladybird beetle (Harmonia axyridis) swarm (Nalepa and Weir, 2007). (o). Daddy longlegs (Opiliones: Leiobunum) aggregation (Shear, 2009). (p). Blow fly larvae (Calliphoridae)) migration (Lashley et al., 2018). For video, see Supplemental Video S6. (q). Darkwinged fungus gnat larva (Sciaridae) aggregation (Sutou et al., 2011). For video, see Supplemental Video S7. (r). Sawfly larvae in a migrating pile. Frame from video by Ben R. Fitzpatrick. For video, see Supplemental Video S8. (s). Wild type C. elegans aggregation on agar (Sugi et al., 2019). (t). Whirligig beetle (Gyrinidae: Dineutus sublineatus) aggregation (Lin and Strausfeld, 2012). (u). Oak processionary caterpillar (Thaumetopoea processionea) aggregation (Maronna et al., 2008). (v). Procession of pine processionary caterpillars (Thaumetopoea pityocampa) (Uemura et al., 2020). For video, see Supplemental Videos S9 and S10.

How bond types affect aggregations
The internal structure of an aggregation depends on how the individuals inside are connected. We categorize the active bonds in an aggregation into three main types, shown in Figure 3: entanglement, strong leg–leg bonds, and friction, although some aggregations may have properties that fall into more than one category.
In entangled (G11) aggregations, long flexible individuals wrap their bodies around one another, such as the worms in Figure 3(a). These aquatic worms entangle into a roughly spherical “blob”, shown in Figure 4(a) and (b) and Supplemental Video S1 (Aydin et al., 2020; Deblais et al., 2020). The bodies of smooth individuals would slide on one another, causing the individuals to disentangle and drift apart. Sludge worms have small bristles on their bodies that prevent sliding and reinforce the entangled aggregation (Deblais et al., 2020).
In aggregations connected by strong, reversible leg–leg bonds, individuals use claws and adhesive pads on their legs to grip one another, such as the bees in Figure 3(b). These bonds give individuals finer control of their position and allow them to modify the aggregation by breaking and reforming bonds in response to local stimuli. These bonds are critical to the formation of these aggregations: deactivating fire ant tarsal pads by coating ants in baby powder reveals that ants require tarsal pad connections to link together (Foster et al., 2014; Phonekeo et al., 2017). Examples of invertebrates aggregating using leg–leg bonds include army ants in bridges and bivouacs, fire ants in rafts or towers, western honey bees in swarms, giant honey bees covering the surface of their nests, and blister beetle larvae on stalks of grass, as shown in Figure 4(c)–(f) and (k) (Hafernik and Saul-Gershenz, 2000; Kastberger et al., 2008; Mlot et al., 2011; Peleg et al., 2018; Reid et al., 2015).
In aggregations with frictional bonds, individuals touch one another but do not form strong bonds with one another, such as the black soldier fly larvae in Figure 3(c). These individuals may either not be able to grab one another with their legs or have no legs at all, and are not long and flexible enough to entangle their bodies with one another. This can be thought of as having a short-range attraction potential (G4). The result is either individuals piled up on one another or clustered on a surface and touching each other with their skin. These piles can be three-dimensional, such as feeding fly larvae, daddy longlegs and beetles clumping for warmth, spiderlings on their mother’s back, and sawfly or fungus gnat larvae piling over one another in processions, in Figure 4(i), (m)–(o), (p)–(r) (Brach, 1976; Brues, 1951; Coddington et al., 1990; Copp, 1983; Jones, 1893; Lashley et al., 2018; Machado et al., 2002; Rivers et al., 2011; Shishkov et al., 2019; Williston, 1894). In the two-dimensional limit of a pile, individuals cluster next to each other on a surface. This type of aggregation is found in sawfly larvae covering leaves, whirligig beetles on water surfaces, and processionary caterpillars, as in Figure 4(j) and (t)–(v) (Boevé, 2015; Fitzgerald, 2003; Fletcher, 2007; Lin and Strausfeld, 2012; Uemura et al., 2020; Voise et al., 2011; White and Deacon, 2020).
In addition to these active bonds, individuals use the physical forces between themselves and their surroundings to aggregate, such as the surface tension on the water-air interface (G32). Networks of wild type C. elegans worms, as in Figure 4(s) form primarily through the interaction of physical forces: the aggregation forms when individual motion is reoriented along the same axis by collisions, and the resulting networks are held together by surface tension (Demir et al., 2020; Sugi et al., 2019). Other aggregations form with the assistance of mechanical forces, but use their activity to fine-tune the aggregation structure: for instance, whirligig beetles are initially drawn together by capillary forces and move within the aggregation to find preferred positions for foraging or conserving energy (Lin and Strausfeld, 2012; Romey and Galbraith, 2008; Voise et al., 2011). Finally, individuals can intentionally aggregate to change the force distribution on their bodies. Rafting fire ants trap a bubble of air within the raft, increasing the hydrophobicity and buoyancy of the raft. This allows the raft to float despite individual ants being too large to be supported by surface tension (Mlot et al., 2011). To understand how an invertebrate aggregation is structured, it is necessary to understand the combination of these passive bonds and the entangled, leg–leg, and frictional active bonds between individuals.
Now that we categorized the type of bonds that exist within an aggregation, we can move on to categorizing the aggregation’s shape in Section The geometry of an aggregation.
The geometry of an aggregation
Here, we highlight 22 sample dense invertebrate aggregations and organize them by their geometry in Figure 4, with the aspect ratio of the aggregation (G3) on the x-axis, and dimensionality on the y-axis (aggregations where the individuals span an axisymmetric volume are “three-dimensional”). The aspect ratio arises from the aggregation’s function and the surroundings, and varies from the rounded blobs in Figure 4(a) and (b) to the long chains of processionary caterpillars in Figure 4(v). Rounded aggregations, such as the bee swarms and army ant bivouacs shown in Figure 4(c), (d), (f), (g) and (l), reduce surface area. Other aggregations, such as ant bridges and moving piles of larvae in Figure 4(h) and (p)–(v) are elongated as the organisms collectively travel from place to place (Brues, 1951; Reid et al., 2015; White and Deacon, 2020).
The dimensionality of an aggregation describes the space that an aggregation occupies, from aggregations occupying volumes in Figure 4(a)–(h), to aggregations several individuals thick on flat surfaces or shells in Figure 4(i)–(u), to the one-dimensional chain of caterpillars in Figure 4(v). Three-dimensional aggregations enclose a large number of individuals in their internal environment and can hide individuals from predation, such as the worker bees surrounding the queen in a honey bee swarm or army ants protecting the queen and brood in a bivouac (Cully and Seeley, 2004; Franks, 1989; Heinrich, 1981; Kronauer, 2020). Aggregations spread out on exposed surfaces have more active ways of protecting the individuals inside, such as the tail flicking of sawfly larvae and giant honey bee shimmering in Figure 4(j) and (k) (Fletcher, 2007; Kastberger et al., 2008).
Aggregations can change their shape and dimensionality to adapt to their environment: for instance, fire ants flatten their rafts to take advantage of surface tension to trap an air bubble with the hydrophobic ant cuticle and stay afloat (Mlot et al., 2011). Next, we discuss the properties of aggregations resulting from their bonds and shape and how they change these properties in Section Aggregations as active materials.
Aggregations as active materials
In this section, we describe how physics-based approaches are used to understand the behavior of dense invertebrate aggregations. Some of these approaches take a top-down view of the aggregation to learn its bulk properties—for example, studying the viscoelasticity of an aggregation with rheology (G19, G33) or the flow of individuals within it with particle image velocimetry (G23). Other studies take a bottom-up view, tracking the behavior of individuals to understand how the aggregation functions as a whole. We first discuss the analogy between properties and states of soft materials to invertebrate aggregations in Section Material properties of aggregations and then how individuals move in an aggregation in Section Motion of an aggregation.
Material properties of aggregations
Many invertebrate aggregations can be thought of as self-assembled living materials (Aydin et al., 2020; Tennenbaum and Fernandez-Nieves, 2017; Tennenbaum et al., 2016; Vernerey et al., 2018), and the tools for understanding materials can be useful for understanding these aggregations. Are these invertebrate aggregations liquid or solid? In many cases, they are both. Treating very dense aggregations, in which invertebrates are tightly packed with one another, as viscoelastic materials (G33) can elucidate their solid (elastic, G9) or liquid (viscous, G34) properties.
Rheology (G19) shows that fire ant and sludge worm aggregations have a viscoelastic response to shear. Very dense fire ant aggregations are primarily elastic; less crowded fire ant aggregations are both elastic and viscous and exhibit shear-thinning (their viscosity decreases with higher shear strain, G27) at high deformation rates (Tennenbaum and Fernandez-Nieves, 2017; Tennenbaum et al., 2016). Sludge worm blobs can be thought of as entangled active polymers (G25, G11). Like inactive entangled polymers, these blobs are shear-thinning (Deblais et al., 2020). Similarly, constant strain (G31) compression experiments of black soldier fly larvae reveal how the aggregation reacts to external forces from material, such as good scraps or compost, piled on them. When compressed, inactive black soldier fly larvae have viscoelastic properties; meanwhile, active larvae respond to applied forces in seconds to alleviate the compressive forces on individuals (Shishkov et al., 2019).
The effects of activity on viscosity and shear-thinning are different for fire ant and sludge worm aggregations. Fire ant aggregations have a higher viscosity than sludge worm blobs: the viscosity of fire ants decreases from 106 to 10° Pa s as the shear rate increases from 10−4 to 102 1/s, while the viscosity of sludge worms decreases from 102 to 10−1 Pa s as the shear rate increases from 10−3 to 101 1/s (Deblais et al., 2020; Tennenbaum et al., 2016). Shear-thinning of fire ant aggregations at high deformation rates is thought to happen as ants break their leg–leg bonds to avoid being damaged (Vernerey et al., 2018). Meanwhile, sludge worm activity is inversely correlated with viscosity at low shear rates, most likely because the activity rearranges and disentangles the worms. At high shear rates, increased worm activity is positively correlated with viscosity. Thus, sludge worm shear thinning is effectively decreased by activity (Deblais et al., 2020).
These experiments with ants, worms, and fly larvae show that aggregations have material properties that can be measured by applying external forces. They also demonstrate that individual activity has different effects on the properties of different systems. Insights gained from these studies both explain how aggregated invertebrates respond to the forces they encounter in nature, and how adding activity would affect the properties of a non-living granular material.
Some invertebrate aggregations control their temperature for the comfort of the individuals inside instead of passively heating or cooling with their environment like an inactive material, so the discussion of their thermal properties goes beyond measurements of properties such as heat conductance. Thermal imaging and arrays of temperature sensors are powerful tools to investigate invertebrate thermoregulation. Some aggregations thermoregulate to raise the temperature to a certain threshold. For instance, eastern honey bee species including A. cerana japonica and A. dorsata can kill a wasp by covering it in a three-dimensional “heat ball”, as in Figure 4(d). They raise the temperature of the wasp to 47°C (Kastberger et al., 2008; Ono et al., 1995), but no higher, since the lethal temperature of a honey bee is 48–50°C (Ono et al., 1995). Fly larva piles generate heat to increase larval metabolism (Johnson and Wallman, 2014; Johnson et al., 2014; Tomberlin et al., 2009) up to a lethal temperature threshold (which depends on the species) (Rivers et al., 2011). Other aggregations, such as army ant bivouacs and western honey bee swarms, aim to keep the temperature in the middle of a comfortable range than at the highest end of it. Army ants in bivouacs use their metabolism to generate heat and open air channels inside the bivouac to cool it. Similarly, western honey bee swarms keep a constant temperature inside the swarm by contracting the swarm in cold weather and expanding it in the heat (Cully and Seeley, 2004; Heinrich, 1981; Peters et al., 2021). Army ant bivouac and honey bee swarm changes in response to ambient conditions are not directly correlated to ambient temperature. Army ant bivouacs only raise the internal temperature if necessary for the survival of the brood inside and otherwise lower their metabolic rate to survive at a colder temperature (Baudier et al., 2019), and honey bee swarms respond faster and maintain a more consistent swarm shape when the environment is cooled than heated (Peters et al., 2021). This likely helps the ants or bees conserve energy and account for mechanical constraints on their structure while maintaining acceptable internal conditions for the constituent individuals.
So far, we have reviewed invertebrate aggregations through the lens of soft materials. However, these aggregations are made up of living, sentient individuals who can initiate internal motion and collective locomotion that goes beyond what conventional soft materials can do.
Motion of an aggregation
Individuals within an aggregation are often far from static, distinguishing these aggregations from piles of grains. We consider two types of motion: first, internal motion that can change the aggregation surface or bulk structure (Figure 5), and, second, motion that propels the entire aggregation forward (Figure 6). We present the known time scales and speeds of motion of aggregations in Supplemental Table 1. Examples of individual motion within invertebrate aggregations. All scale bars are 5 cm long. (a). Sequence of frames showing giant honey bees “shimmering”. Left: bees on the surface of their nest. Center: bees detect a threat and begin shimmering. Right: the shimmering wave propagates through the bees (Kastberger et al., 2008). See Supplemental Video S4 for video. (b). Western honey bees reconfigure their swarm depending on the weather. Left: bees are closely packed on a cold, dry morning. Center: bees expand their swarm in the warmer afternoon. Right: bees rearrange into a protective curtain from rain (Cully and Seeley, 2004). (c). Trajectories of western honey bees on the surface of a swarm under mechanical shaking show bees moving up to reinforce the swarm. Tracks are colored by time, with blue at the start of the experiment and yellow at the end. Image from Ref. (Peleg et al., 2018). (d). Fire ants change the shape of their raft. Left: A ball of ants is placed on the water surface. Right: Ant raft flattens into a thin pancake. See Supplemental Video S5 for full video (Mlot et al., 2011). (e). Top view of a pile of black soldier fly larvae eating an orange slice. Larvae fall down the top of the pile as indicated by arrows. Fresh larvae crawl towards the food on the floor to replace those falling (Shishkov et al., 2019). (f). Sawfly larvae flick their posterior ends, or “tails”, in an alarm display. Left: sawflies are static before a flick. Center: Sawflies on the leftmost edge of the leaf begin flicking their tails. Right: sawflies on the right edge of the leaf flick their tails. Frames from video by David Yeates. See Supplemental Video S3 for video. Examples of aggregations in which the collective actions of the individuals move the center of mass. Scale bars in (a–c) are 5 cm long; scale bar in (d) is 0.5 cm long. (a). Blackworm blob moves towards cold water. Top: The worm blob is subject to a temperature gradient at the start of the experiment. Center: the blob moves towards the colder side of the water on the right. Bottom: the warm blob reaches the cold water. Images from Ref. (Aydin et al., 2020). Full video is shown in Supplemental Video S1. (b). An army ant bridge forms and grows to span a wider gap in the path as more ants join (Reid et al., 2015). Full video is shown in Supplemental Video S2. (c). Time-lapse of a trail of two species of processionary caterpillars in a procession. Full video is shown in Supplemental Video S10. Left and right frames show the procession at different times. Video by Stefanie White and Amy Deacon. (d). A snapshot of fungus gnat larvae moving in the direction of the arrow (Sutou et al., 2011). A video of migrating fungus gnats is shown in Supplemental Video S7.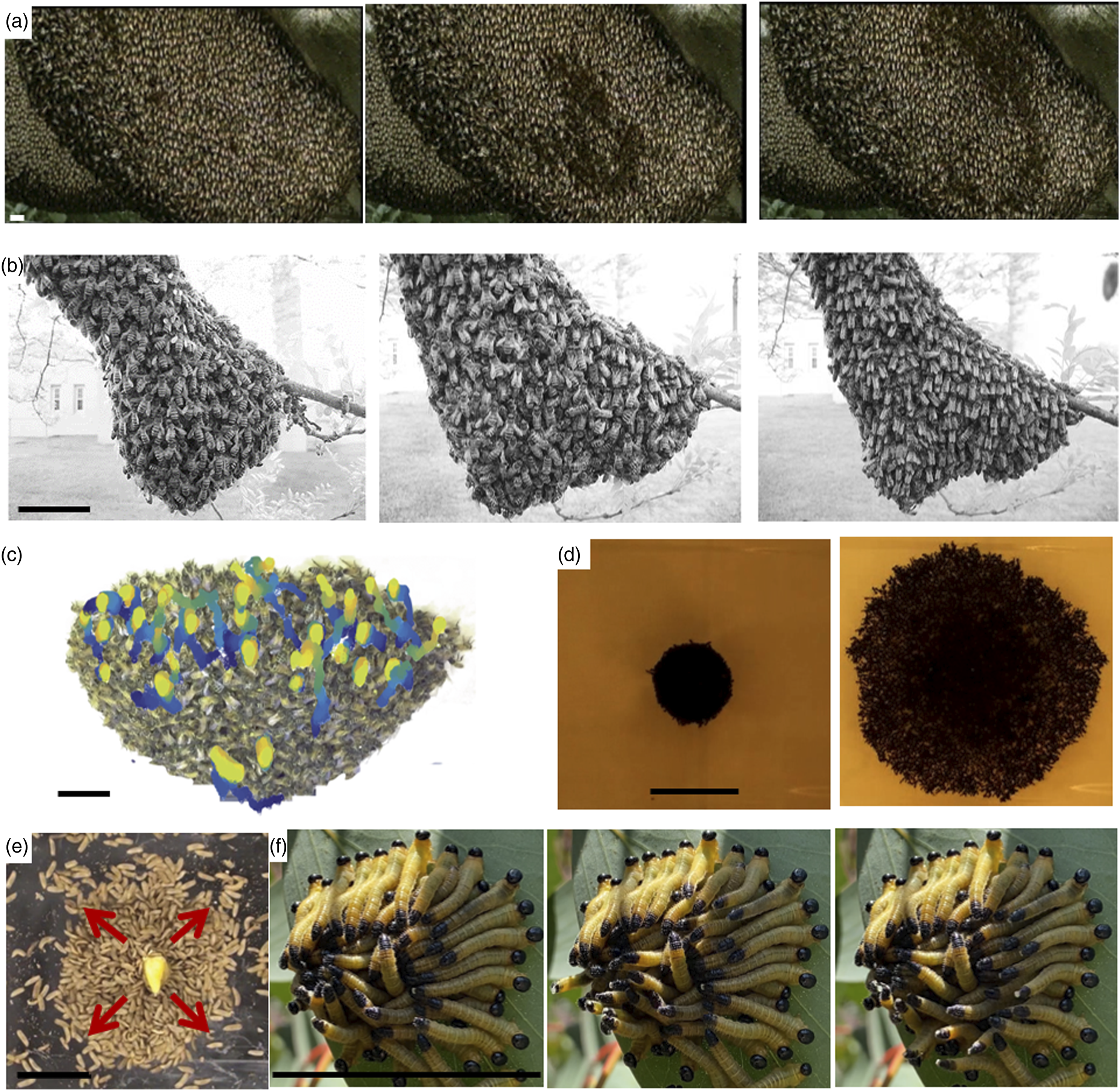

We first consider internal motion within an aggregation in (Figure 5). Some invertebrates move in fast, intermittent bursts lasting seconds to deter intruders, and then return to their original state. For example, giant honey bee colonies (Figure 4(k)) keep hornets away by “shimmering” (Figure 5(a) and Supplemental Video S4). When quiescent bees detect a hornet, several bees initiate shimmering by flipping their abdomens upwards, as in the center image. The wave of flipping abdomens travels around the nest (Kastberger et al., 2008). This wave is initiated by specialized groups of bees, and other bees join by following their neighbors (Kastberger et al., 2012, 2014; Schmelzer and Kastberger, 2009). Shimmering vibrates the nest, which might help bees communicate about their defensive state (Kastberger et al., 2013). Similarly, sawfly larvae gathered in a clump on a leaf (Figure 4(j)) flick their tails in synchronized bursts to ward off predators (Supplemental Video S3 and Figure 5(f)). This motion is also synchronized through substrate vibrations (Boevé, 2015; Fletcher, 2007). Finally, aggregating whirligig beetles (Figure 4(t)) suddenly swim away from each other when they sense danger, and take some time to regroup (termed a “flash expansion”) (Romey and Lamb, 2015).
In some invertebrate aggregations, slower transient motion (on the order of minutes to hours) can change the shape and density of an existing aggregation or form a new aggregation. For an example of shape change, western honey bee swarms (Figure 4(c)) maintain a comfortable bulk temperature by changing the density of the swarm. The time series in Figure 5(b) shows that bees in a swarm are tightly packed in cold weather and loosely packed in warm weather (Cully and Seeley, 2004; Heinrich, 1981; Peters et al., 2021). When a gust of wind shakes the swarm, bees move up to its base where the strain is highest to reinforce it, flattening the cluster until the shaking stops (Figure 5(c)) (Peleg et al., 2018). Similarly to bee swarms, rafting fire ants keep the raft floating and cohesive in changing water conditions by breaking and forming new connections (Mlot et al., 2011, 2012). These fire ant rafts spread from a ball into a flat, water-repellent raft in minutes and float for days until they reach land (Figure 4(l), Figure 5(d) and Supplemental Video S5). Ants walk towards the raft edges and attach at the water surface, forming a “treadmill” to expand the raft outwards (Mlot et al., 2011; Wagner et al., 2021). These aggregations can be thought of as living adaptive materials that respond to their environment (Walther, 2020).
Analogies between the formation of aggregations of invertebrates to phase separation (G24) of non-living particles reveal unique properties of living aggregations. Wild-type C. elegans worms align through collisions with one another to aggregate into a nematic phase (G18), as in Figure 4(s) (Demir et al., 2020; Sugi et al., 2019). This process is an example of motility-induced phase separation (G17) in a living organism (Cates and Tailleur, 2015). The process by which sludge worms that are initially spread out in water assemble into a blob, shown in Figure 4(b), is similar to polymer phase separation, with many smaller blobs forming and coalescing over time. Unlike inactive polymer phase separation (G13, G25), which is caused by large polymer aggregates having lower surface energy than small polymer aggregates (G32), sludge worm phase separation is caused by small blobs actively merging to form large blobs (Deblais et al., 2020). These examples highlight the similarities and differences between living aggregations and non-living materials. Existing theories of active matter can help explain C. elegans aggregation behavior (Demir et al., 2020); however, new models of active entanglement are necessary to describe the aggregations of worm blobs (Deblais et al., 2020).
In other aggregations, continuous steady-state internal motion maintains the structure of the aggregation. For instance, the motion of fly larvae in a feeding pile (Figure 5(e)) appears chaotic, but it allows larvae to recirculate around food. Fresh individuals crawl toward food on the floor, and larvae that finished feeding fall on the top layer of the pile, as shown by treating the larvae as an active fluid using particle image velocimetry (G23) (Shishkov et al., 2019). Similarly, individual fire ants inside towers (Figure 4(f)) sink and are constantly replaced by ants from outside the tower as shown with X-ray videography and tracking (Phonekeo et al., 2017). Similar internal restructuring is found in whirligig beetle aggregations, in which feeding individuals are found at the periphery of the aggregation while satiated individuals are found closer to the center (Romey and Galbraith, 2008).
Second, we consider the motion of the center of mass of the entire aggregation towards the individuals’ desired state (Figure 6). In some cases, the combined velocity vectors of individuals propel an aggregation. For example, moving as an entangled aggregation helps a spherical blob of blackworms (Figure 6(a) and Supplemental Video S1) follow a temperature gradient to reach their preferred cooler water. Worms sticking out of the cooler front of the blob pull it forward, while the worms on the hotter rear are coiled and reduce friction (Aydin et al., 2020).
Some piling invertebrates travel by crawling over one another as they forage. For instance, the “migrations” of fungus gnat larvae (Figure 6(d) and Supplemental Video S7) have been documented since the 1800s, but remain poorly understood (Brues, 1951; Jones, 1893; Sutou et al., 2011; Williston, 1894). Similar traveling piles of sawfly larvae are synchronized using body contractions and tail twitches (Fletcher, 2007), shown in Figure 4(r) and Supplemental Video S8. Finally, blow fly larvae travel as a large disordered pile to search for a new food source (Figure 4(p) and Supplemental Video S6) (Lashley et al., 2018).
In the one-dimensional limit of a moving pile, processionary caterpillars walk in one-dimensional head-to-tail trails while searching for a new tree to feed from or a burrow to pupate in (Figure 4(u) and (v), Figure 6(c), and Supplemental Videos S9 and S10). These can be made up of more than one species of caterpillar and rely both on pheromones and physical touch (Fitzgerald, 2003; Uemura et al., 2020; White and Deacon, 2020).
A final mechanism for the motion of the center of mass can result from directed aggregation and dissipation. For example, when raiding, Eciton army ants come across a gap in their path, a fraction of them self-organize into a bridge (Figure 6(b) and Supplemental Video S2). The bridge becomes shorter or longer depending on the flow of ants over it, optimizing the number of raiding ants and bridge ants to maximize their foraging rate (Graham et al., 2017; Reid et al., 2015; Rettenmeyer et al., 2011).
Discussion
In this review, we described a number of recent advances in understanding the material properties and dynamics of invertebrate aggregations—particularly those of fire ants, army ants, western honey bees, giant honey bees, entangled worms, and fly larvae. These studies are a promising stepping stone to employing physics techniques to understand aggregations that, so far, have attracted little attention from the soft matter community. In this discussion, we describe several potential directions for furthering these studies. Drawing analogies between aggregated invertebrates and inanimate soft materials could provide a framework to conceptualize the emergent behavior of the group.
There are a number of unanswered questions about the structure of invertebrate aggregations that can benefit from an interdisciplinary approach. It can be insightful to consider their bulk properties, such as size and packing density. The maximum size of an aggregation might be determined by physical forces, such as the maximum load that an individual in a hanging aggregation of ants or bees can support, or the maximum capillary force that can support the weight of an ant raft. Ecological factors may also play a role, such as the maximum number of individuals a colony can support with the available resources. How densely packed the individuals are within this large aggregation might be determined by the local conditions inside the aggregation. A densely packed aggregation could be more insulated against the cold, but a dense packing would be detrimental if the temperature inside is too high or the oxygen concentration is too low.
We can also consider the bulk viscous and elastic properties of aggregations formed through entanglement or strong reversible bonds (for instance, blister beetle larva clumps) with rheology (G19, G33). Understanding the viscoelastic properties of an aggregation shows how it withstands external forces, for instance remaining solidlike to keep the structure of the aggregation intact, or breaking the bonds between to become liquidlike and avoid damaging the individuals inside. This has proven successful with fire ant and entangled worm aggregations (Deblais et al., 2020; Tennenbaum et al., 2016).
Alongside the bulk properties of aggregations, it is important to understand the distribution of individuals inside them. Some of the aggregations we discuss are opaque and several layers thick, so their internal structure cannot be seen with the naked eye. However, they can be investigated with 2D X-ray imaging, as has been done with fire ants (Foster et al., 2014) or with X-ray computed tomography (G35). Once we know how individuals are arranged, we can consider them to have distinct liquid crystal phases (G15).
This description of the alignment of densely packed rod-shaped particles may prove useful for understanding the behavior of dense invertebrate aggregations of the elongated, yet not entangled organisms. We consider aggregations in which the individuals are not aligned with one another to be examples of a living isotropic (G14) phase. This description applies to piles of fly larvae, wolf spiders, ladybird beetles, and daddy longlegs (Figure 4(i) and (m)–(p)) or whirligig beetle clusters (Figure 4(t)).
Individuals that are aligned with one another through the elongated geometry of their bodies or their motion can be thought of as a nematic phase (G18, G21). A network of C. elegans worms in Figure 4(s) is an example of an apolar nematic phase, in which individuals are aligned but travel in opposite directions (Sugi et al., 2019). Examples of a polar nematic phase, in which the individuals are both aligned and travel in the same direction, include confined fly larvae in Figure 3(c) and moving piles of sawfly larvae and fungus gnat larvae in Figure 4(q) and (r). We can think of aggregations in which individuals are aligned and arranged in a circle as a cholesteric (G6) phase. This is often seen in aggregations of sawfly or beetle larvae and is referred to as “cycloalexy” (Jolivet et al., 1990; Dury et al., 2014).
Finally, we can consider invertebrate aggregations in a smectic (G28) phase, with individuals arranged in distinct layers. While we do not have many examples of this in the literature, it is a potential description for the honey bees in the chain in Figure 3(b) or the processionary caterpillars in Figure 4(u) and (v).
Measuring the alignment of individual invertebrates in an aggregation to categorize the aggregations in these phases can help elucidate how the individuals keep their aggregations together through touch receptors on their skin or pheromones (Be’er et al., 2020; Bolhuis and Frenkel, 1997; Digregorio et al., 2018; Klamser et al., 2018; Marchetti et al., 2013).
Being able to visualize the arrangement of individuals in an aggregation can also allow us to use multi-individual tracking techniques or particle image velocimetry (G23) to investigate the motion in these aggregations (Hedrick, 2008; Pereira et al., 2020). This would improve our understanding of the moving piles of sawfly larvae, fungus gnats, and maggots, and potentially lead to new theories of active matter in three dimensions.
Finally, we can consider the forces experienced by these aggregations. Physical forces between individuals, such as ants pulling on one another with their legs or adhesion via mucus or bristles on the skin of worms, can help determine the structure of the aggregation. We can measure the effects of the weight sensed by an individual, such as army ants in bridges deciding whether to leave the bridge by measuring how many ants walk over them (Reid et al., 2015). Giant honey bees and sawfly larvae are also known to communicate via substrate vibrations, which can be measured with Laser Doppler Vibrometry (G16) (Fletcher, 2007; Kastberger et al., 2013).
Analogies between invertebrate aggregations and living materials could include comparisons to smaller length-scale biological objects, such as cells and tissues. Aggregations in which individuals move in synchronized bursts, such as giant honey bee hives and sawfly larvae, are reminiscent of excitable media, such as spiral waves in the heart (Gray and Jalife, 1996). Crawling aggregations, such as piles of fungus gnat larvae, might exert forces on the substrate and one another similarly to cells in a growing tissue (Trepat et al., 2009), and measuring the substrate forces can provide insight into how these aggregations control the movement of their center of mass.
Going beyond soft matter and fluid mechanics, harnessing methodologies to directly modify the behavior of individual invertebrates can help elucidate their aggregation. For instance, behavior can be manipulated with pharmaceuticals, such as directly feeding octopamine and tyramine to honey bees to decrease their thermoregulatory fanning (Cook et al., 2017; Kamhi et al., 2017). Alternatively, the genes of individuals with known genomes, such as fruit fly larvae, fire ants, and western honey bees, could be modified to increase or suppress aggregation (Consortium, 2006; McKinney and Ben-Shahar, 2020; Wurm et al., 2011).
Just as insights from materials science can help study invertebrate aggregations, these aggregations can inspire self-assembled engineered materials of the future. Aggregations of insects and other animals have inspired robot swarms, which also consist of individuals obeying local rules to result in emergent behavior (Dorigo et al., 2020). Combining the studies of robot and invertebrate swarms has two potential benefits: first, this provides insight into the behaviors and properties of invertebrates that result in collective behavior, such as modeling entangled blackworms using entangled robots (Aydin et al., 2020). Second, robotic models of aggregating invertebrates can provide a starting point for future robot swarms or self-healing, active materials.
In sum, we discussed how aggregations of bees, ants, larvae, worms, and other invertebrates can be understood from a soft matter perspective. The aggregations presented here are only a sample of the blobs, piles, and mass migrations existing in nature. Many other invertebrates form disordered aggregations or piles such as bombardier beetles (Schaller et al., 2018), drones of stingless bees on leaves (Grüter, 2020), dung beetles, carrion beetles, cockroaches, leaf-footed bugs, juvenile insects, and other arthropods (Costa, 2006). We encourage our readers to delve into the countless examples of invertebrate aggregations and hope to inspire a new generation of scientists to explore collective dynamics and bring a deeper understanding of the physics of dense living aggregations.
Glossary
G1 Active Material – A material in which the constituent particles have an internal source of energy that results in propulsion (Marchetti et al., 2013; Ramaswamy, 2010, 2017).
G2 Apolar particle – An active particle propelled in either direction along its major axis (Marchetti et al., 2013; Ramaswamy, 2010).
G3 Aspect ratio – Ratio of an individual’s or an aggregation’s length to its width or height (Bolhuis and Frenkel, 1997).
G4 Short-range attraction potential – a force that draws individuals closer to one another if they are a short distance away, and does not act if the individuals are farther apart (Pham et al., 2004).
G5 Brownian motion – The random motion of a particle in a liquid or gas state (Jacobs, 1935).
G6 Cholesteric – A material state in which the particles are aligned, but with a twist to the structure (Tamaoki, 2001).
G7 Diffusion – The net movement of a substance from a high chemical gradient to a low chemical gradient (Jacobs, 1935).
G8 Dynamical process – the interactions of a group of agents, such as aggregating invertebrates, over time (Windeknecht, 1971).
G9 Elasticity – Deformation of a material in response to an applied force that immediately reverses with applied force. An elastic material is also called solidlike (Barnes et al., 1989).
G10 Emergent behavior – A behavior of a group that arises from the actions and properties of the individuals (Corning, 2002).
G11 Entanglement – Particles in a material connected by interpenetration, such as worms wrapped around one another (Gravish et al., 2012).
G12 Granular material – a material made out of discrete particles, such as grains of sand or coffee beans (Gravish et al., 2012).
G13 Inactive material – a material that consists of components without their own energy source.
G14 Isotropic – a material state in which there is no order to the arrangement of the particles, and the values of the material properties are the same in all directions (Bolhuis and Frenkel, 1997; Cladis, 1975; De Gennes and Prost, 1993).
G15 Liquid crystal – A material that has properties both of liquids and solid crystal, with non-isotropic molecule shapes (Bolhuis and Frenkel, 1997; Cladis, 1975; De Gennes and Prost, 1993).
G16 Laser Doppler Vibrometry – a technique that measures the vibrations of a material (Kastberger et al., 2013).
G17 Motility-Induced Phase Separation – Aggregation of active particles into clusters. This is caused by the feedback loop of particles colliding and slowing down, which causes more particles to collide with them and slow down (Cates and Tailleur, 2015).
G18 Nematic – A material state in which the molecules are oriented in the same direction but are not arranged in layers (Bolhuis and Frenkel, 1997; Cladis, 1975; De Gennes and Prost, 1993).
G19 Rheology – An experimental technique that measures the viscous and shear properties of a material (Barnes et al., 1989).
G20 Order parameter – A measure of the alignment of particles in a material, with 0 being no alignment and 1 meaning all particles are oriented along the same vector (De Gennes and Prost, 1993).
G21 Polar particle – An active particle with a “head” and “tail” that is propelled in the head-to-tail direction along its major axis (Ramaswamy, 2010; Marchetti et al., 2013).
G22 Polar order – particles ordered with their “heads” in the same direction (Marchetti et al., 2013; Ramaswamy, 2010).
G23 Particle Image Velocimetry (PIV) – A technique from fluid mechanics that measures the velocity field of a moving fluid by taking consecutive image frames and correlating the positions of particles from frame to frame. The result is a vector field superimposed upon the fluid (Thielicke and Stamhuis, 2014).
G24 Phase separation – the spontaneous separation of a material into two or more phases (Marchetti et al., 2013).
G25 Polymer – a material made up of long chains of molecules (Doi, 2013).
G26 Shear – stress applied tangentially to a material surface (Barnes et al., 1989).
G27 Shear-thinning – the viscosity of a material decreasing with increasing shear stress (Barnes et al., 1989).
G28 Smectic – A material state in which the molecules are oriented in the same direction and are arranged in layers (Bolhuis and Frenkel, 1997; Cladis, 1975; De Gennes and Prost, 1993).
G29 Soft material – a material that has both solid and liquid properties (Doi, 2013).
G30 Star polymer – a polymer consisting of several polymer chains fused at a central point (Ren et al., 2016).
G31 Strain – a stress applied perpendicular to a material surface (Barnes et al., 1989).
G32 Surface tension – the tendency of the surface of a liquid to occupy the smallest possible area caused by the cohesive forces within it.
G33 Viscoelasticity – The combination of viscosity and elasticity that causes some materials to have both viscous (G34) and elastic (G9) components to their response to an applied force. Viscoelastic materials can be thought of as being both solid and liquid (Barnes et al., 1989).
G34 Viscosity – Resistance to deformation of a material in response to an applied force caused by friction between its layers. A viscous material can also be thought of as fluidlike (Barnes et al., 1989).
G35 X-ray Computed Tomography (CT) – Technique that makes a three-dimensional image of all of the features inside an object by taking a set of X-ray projections at angles around an object. Industrial CT refers to scanning large objects in this manner; micro-CT refers to scanning small objects with a high resolution (Kalender, 2006).
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material - Social insects and beyond: The physics of soft, dense invertebrate aggregations
Supplemental Material for Social insects and beyond: The physics of soft, dense invertebrate aggregations by Olga Shishkov and Orit Peleg in Collective Intelligence
Supplemental Material
Supplemental Material - Social insects and beyond: The physics of soft, dense invertebrate aggregations
Supplemental Material for Social insects and beyond: The physics of soft, dense invertebrate aggregations by Olga Shishkov and Orit Peleg in Collective Intelligence
Footnotes
Acknowledgements
We thank Jeffery Tomberlin, Chelsea Cook, Raphael Sarfati, Chantal Nguyen, Dieu My Nguyen, Hungtang Ko, Owen Martin, and Golnar Gharooni Fard for reading and commenting on the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science Foundation (NSF) Physics of Living Systems Grant No. 2014212 (O.P.). Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors(s) and do not necessarily reflect the views of the NSF. We also acknowledge funding from the University of Colorado Boulder, BioFrontiers Institute (internal funds), and the Interdisciplinary Research Theme on Multi Functional Materials and Autonomous Systems (O.P.).
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.