
Abstract
The demand for efficient and qualified measurements is high. The measurements of physical parameters in industrial environments usually are automatically executed using process measurement technologies. The close coupling of the measurement system and process equipment enables in-process data acquisition (inline or online). In contrast, compound-oriented measurements for the qualitative identification and quantitative determination of chemical elements and chemical compounds, or the determination of biological behavior, are still challenging in measurement processes. Today, biological assays as well as high-content and high-throughput screening procedures are well automated. It appears quite differently if the efficiency of analytical measurements should be improved. Due to the characteristics of the samples and processes, inline or online coupling is often not possible. Therefore, atline or offline couplings are gaining in importance. In combination with robotic systems, efficient automation of analytical measurements can be reached.
The book Automation Solutions for Analytical Measurements: Concepts and Applications presents and discusses suitable automation concepts and a variety of realized robot-based analytical measurement systems. In this commentary, the main findings are highlighted and discussed.
Keywords
Process-Measuring Technology and Analytical Measurements
Process-measuring technology (PMT) involves measurement technologies in technical processes, especially in process engineering, including mechanical, thermal, chemical, and electrochemical process engineering as well as bioprocess engineering. The process measurement instruments are used to control and regulate the technical processes and for quality control. Typical measurands are the flow, level, temperature, and pressure of solids, liquids, and/or gases and their mixtures, rarely concentrations; pH value; and redox potential, to name a few. The process types are changing throughout time. Today, additional challenges can be found in PMT with a view to new chances and possibilities. The interesting process types in process engineering are expanded to life science processes such as environmental engineering, biotechnology, and medicine. Analytical measurements are essential among these new process types and require an adequate selectivity related to the parameter to be measured. These parameters include the elemental composition, structural information of molecules, concentration of chemical elements and/or chemical compounds, and biological behavior of cells. Analytical measurements are performed using techniques of elemental analysis, structural analysis, and cell-based assays.
In contrast to well-automated high-throughput and high-content screening systems, analytical measurement processes have still a high demand for suitable automation solutions. Reasons can be found in the complex process structure, with a high number of subprocesses and frequently changing applications. Furthermore, microplates with standardized dimensions are often not suitable since single vessels with various shapes and volumes are used. Other reasons are the strong environmental conditions of some sample preparation procedures, such as high pressures and temperatures, organic or highly corrosive reagents, as well as special tasks (e.g., solid phase extraction, derivatization, etc.). This results in a wide variety of difficulty degrees and individual structures. Inline and online couplings between the process and the measurement system are mostly not feasible. Atline and offline coupling are gaining in importance. Especially, a convenient combination with robotic systems is suitable to overcome the challenges mentioned above.
Concepts for Robot-Based Measurement Systems
Classical industrial automation concepts are not applicable for life science processes due to their different structure. Automation structures in industries can be classified according to their process structure (meaning the structure of the technical process), local structure (the local distribution of the automation devices), and functional structure (the execution of automation functions such as parallel or serial, and centralized or decentralized). 1 The structure of a technical process can be defined as a centralized process if the process can be considered a unit, and as a decentralized process if several subprocesses have to be executed. Analytical measurement processes always have a decentralized structure, since each process is divided into subprocesses. A classification into functionally centralized and decentralized structures is not suitable, since hierarchical functional systems are applied. In analytical measurements, the focus is placed on system flexibility instead. Modular expandability and adaptability of the automated measurement systems to new applications are further important criteria. Thus, adaptive systems can be defined as open systems, and nonadaptive ones as closed systems. Analytical measurement processes consist of subprocesses for sample preparation, measurement, transportation, and data evaluation. Therefore, analytical measurement systems can be classified into locally centralized and decentralized systems, as well as into open and closed systems. In the application of robotic components, a distinction can be made among central system integrators, flexible robots, and integrated robotics.
Realized Automated Measurement Systems
The theoretically discussed automation concepts were practically realized for a number of applications in the fields of environment, medicine, research and development, and biotechnology, as well as in quality control. Using a robot as a central system integrator, a centralized closed automation system was realized for the determination of the enantiomeric excess of chiral compounds. 2 A centralized open system was designed and evaluated for the determination of mercury in waste wood and of methacrylates in dental materials.3–5 A decentralized structure of the automation system was selected to determine calcium and phosphor in bones (a closed system). 6 This system was extended to an open structure to execute the processes mentioned above and to determine the composition of pig bile and incrustations from biliary endoprostheses.7,8
A dual-arm robot acting as a flexible robot was applied for direct sample manipulation and common transportation tasks. The system was first designed to execute the measurement process for the determination of chiral compounds (a centralized closed system) and was then significantly extended to a centralized open system performing an additional process for the determination of cholesterol in stent incrustations.9,10 Using mobile robots as transportation elements, this system can be extended to a decentralized open system performing a multitude of different applications and thus providing much more flexibility. The highest degree of flexibility and the ability to expand can be achieved with integrated robotics using mobile robots that not only execute transportation tasks but also are used for direct sample manipulation on different locally distributed automation stations. Figure 1 shows four examples of realized automated measurement systems.
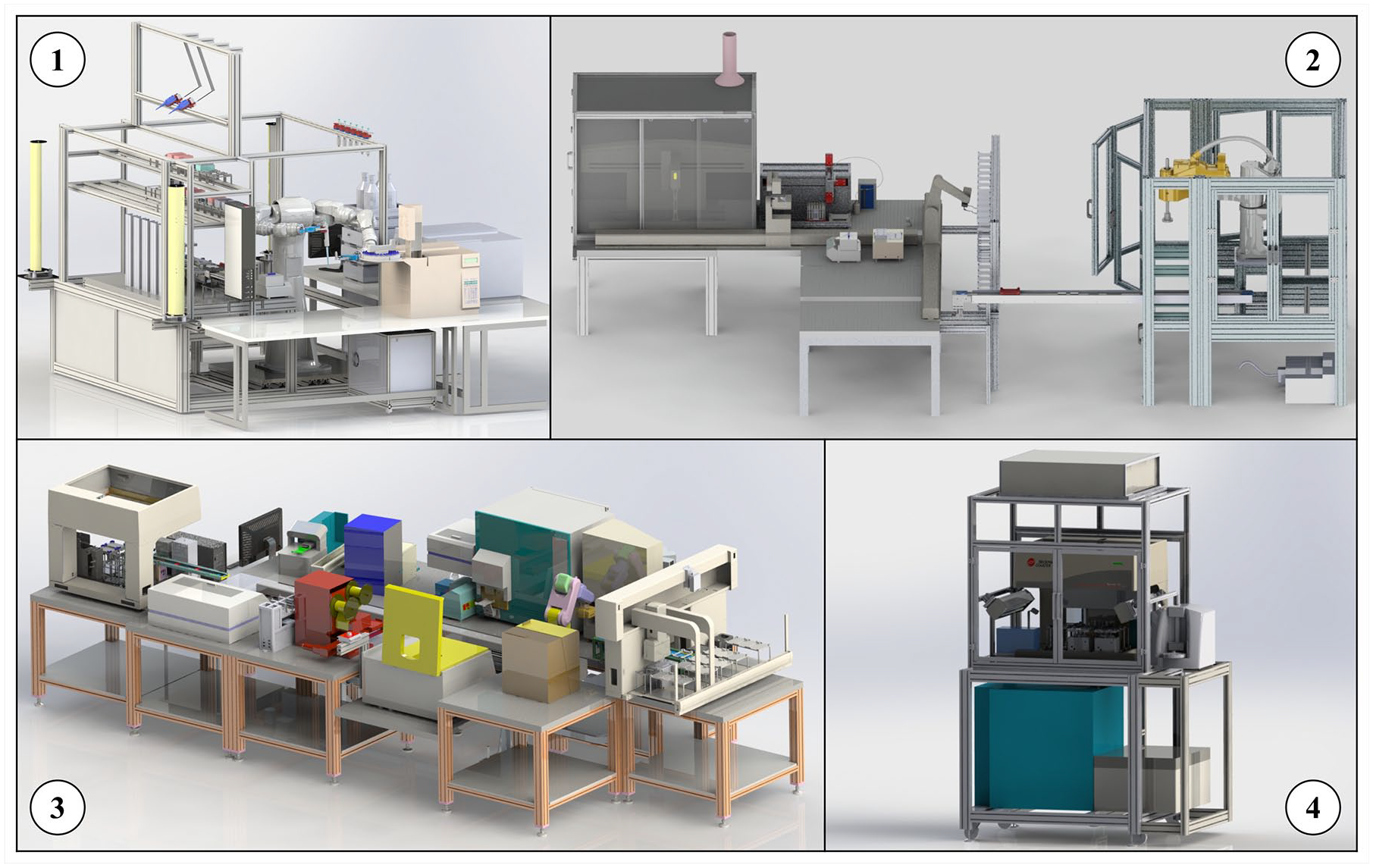
Variety of robot-based measurement systems. (
Software Systems
The software system is typically designed in a hierarchical structure. The highest level for workflow control, including transportation using mobile robots, automated subsystems, and measurement stations, is realized with a hierarchical workflow management system (HWMS). 11 The individual automated systems and stations are controlled by a process control software, and each device is controlled by the device software.
Automated measurement systems with a high sample throughput generate a high amount of data points. This results in a new bottleneck, since manual data evaluation is highly time consuming and the risk of human errors is high. One part is data evaluation of the individual measurement systems. 12 Multiple measurements of one sample with different measurement techniques (e.g., elemental analysis, structural analysis, and cell-based assays) and the combination of results to obtain multidimensional information will gain increasing importance and have to be implemented into automated measurement systems. 13
Future Outlines
Automation Solutions for Analytical Measurements, the first book dedicated to robot-based analytical measurement systems, provides theoretical basics and defines a systematic of suitable automation concepts for environmental, medical, and biological applications and for processes in quality control as well as research and development. Realized automation solutions were critically reviewed and discussed with a focus on special requirements in analytical measurement applications.
To reach the goal of total automation in analytical measurements, the automation concept of integrated robotics is a promising approach. It combines the advantages of the central system integrator and the flexible robot. Due to the decentralized structure, existing systems can be suitably connected and combined. There are still challenging tasks on the way to reaching full automation—looking forward to the future lab for analytical measurements.
Footnotes
Acknowledgements
The authors wish to thank the following research groups for their contributions: Integrated Systems, headed by Dr.-Ing. S. Junginger; IT Systems @ Automations, headed by Dr.-Ing. S. Neubert; and Processes @ Measurement, headed by PD Dr.-Ing. habil. H. Fleischer. Further thanks go to Prof. Dr.-Ing. habil. H. Liu for his support in the field of mobile robotics, and to Yaskawa Europe GmbH, Dr.-Ing. M. Klos, B.Eng. W. Schuberthan, and G. Trapp for providing the two-arm robot CSDA10F and the technical support. Special thanks are expressed to Dr.-Ing. T. Roddelkopf, Dipl.-Ing. L. Woinar, and H. Engelhardt for their technical support, as well as to S. Horn and B.Sc. A. Reichelt for their excellent laboratory work.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors wish to thank the Federal Ministry for Education and Research Germany for the financial support (FKZ: 03Z1KN11 and 13GW0082D). Furthermore, we wish to thank the Federal Ministry for Economic Affairs and Energy for supporting our research (ZF: 4066003DB6).