
Abstract
The demand for automation in the analytical laboratory is high. In contrast to well-automated bioscreening and high-throughput and high-content screening processes, analytical measurement procedures are complex in their structure and changing frequently. Not only do robotic units have to perform transportation or specific single tasks, but also flexible robots are needed to cover several tasks, including transportation and direct sample manipulation. Due to their human-like structure, dual-arm robots are predestined for analytical measurement processes. A new study published in the journal Energies presents a novel integration of electronic piston pipettes into an automation system using a dual-arm robot to perform liquid handling tasks similar to human operators. In this commentary, the main findings are highlighted and discussed.
Keywords
Screening Processes versus Analytical Measurement Processes
In the past decades, bioscreening and high-throughput and high-content screening processes have been developed with a high degree of automation. The processes are typically characterized by a straightforward process structure including transportation, liquid handling, and optical analysis using plate readers. The samples and reagents are mainly handled in microplates with various well numbers up to 3456 and well volumes from a few microliters up to several milliliters. In contrast, analytical measurement processes are not, or are less automated. The process structure is complex and divided into a multitude of subprocesses since sample preparation steps are required prior the analysis. These include liquid–liquid extractions, solid-phase extractions, separations using chromatography or capillary electrophoresis, sonication, filtration, derivatization, and acid-assisted microwave digestions—to name but a few. The samples, chemicals, and reagents are handled using a multitude of different single vessels with various shapes and volumes (typically in the milliliter range). For example, microwave digestion must be carried out in special vessels made of polytetrafluoroethylene (PTFE) due to exposure to high temperatures, high pressures, and strong acid concentration. The autosampler of the measurement device, for example, an inductively coupled plasma mass spectrometer (ICP-MS), only accepts single tubes with volumes from 8 mL to 50 mL requiring liquid transfer. Furthermore, this example shows another significant difference from well-automated screening processes. In bioscreening, aqueous solutions are handled at moderate environmental conditions, for example, incubation at 37 °C (98.6 °F). In contrast, sample preparation steps for analytical measurements are often carried out under extreme conditions, such as high temperatures and pressures, using organic solvents for extractions, high acid concentrations, and handling with toxic reagents. Such single-tube processes are more challenging in automation than microplate handling processes under moderate conditions. 1 As a result, many of these complex sample preparation procedures are still manually performed.
The majority of analytical measurement devices provide an automated sample introduction using autosamplers and autoinjectors. Some devices with continuous-flow injection provide an automated dilution using autodiluters to generate standard solutions for calibration, but the majority of measurement instruments require manually prepared calibration solutions provided in single vials. The automation of the preparation of standard solutions in single vials is another task including opening and closing screw caps and pipetting with high accuracy.
Flexibility of Automated Measurement Processes
The sample throughput in analytical measurements ranges from single measurements up to high-throughput applications. Therefore, one of the key challenges is the flexibility of the automation system related to the adaption to new applications (e.g., elemental and structural analysis) and to easy process generation without deep programming and robotic knowledge. To fulfill this requirement, a well-considered selection of robotic devices, careful software organization, and a functional software structure are essential.
Classical laboratory automation systems involve a central system integrator, for example, an articulated robot with four degrees of freedom (DOF), to perform transportation tasks and thus to connect the individual stations. 2 Each station realizes a special task, such as liquid handling, using a Cartesian robot or a screwing station. When considering the workflow, differences are found between the manual process and the automated procedure. The manual steps must be transferred to the individual stations. In highly regulated areas, there may be limitations in the use of devices that differ from standardized operation procedures and may require a new validation and approval of the automated process.
The idea of an automated process identical to the manual process performed by a human operator can be realized using a human-like robot such as a dual-arm robot. The robot’s degree of freedom is one of the key factors to ensure the desired flexibility. For handling similar to that of a human operator, more degrees of freedom are required than in classical robotic tasks. Within the scope of flexible and frequently changing processes in analytical measurements, the use of dual-arm robots for both transportation and active manipulation tasks is a forward-looking approach. 3
The study we are commenting on shows an example of a successful transfer of sample preparation processes to a dual-arm robotic system with 15 DOF (7 DOF for each arm and 1 for the robot base axis). Liquid handling is a ubiquitous task in laboratory applications. Commercially available automated liquid handling systems are often based on Cartesian robotic systems; systems using an articulated robotic arm are also on the market. Typically, such devices are integrated in self-contained, rigid workstations with a specified and limited workspace.
Dual-arm robotic systems are predestinated for liquid handling processes. Due to the human-like structure of the robotic arms, conventional manual pipettes can be used. The dual-arm robot acts as a flexible robot since it performs transportation tasks to connect several stations on the robotic working area, and additionally, the robot actively manipulates the samples.
The dual-arm robot was equipped with electronic pipettes to optimize the automated liquid handling. 4 The pipetting steps are fully remote controllable and the volumes are automatically adjusted. The focus of this article is the multilevel software system for robot and pipette control, as well as the integration of pipettes into a high-level process control system for the rapid generation of new pipetting processes using the dual-arm robot. Figure 1 shows the robotic system and an executed pipetting process. The dual-arm robotic system presented has the main advantage that the number of transportation steps was significantly decreased using electronic pipettes since the volume can be software control adjusted. This simplifies all liquid handling processes and results in a much higher efficiency of the automation system.
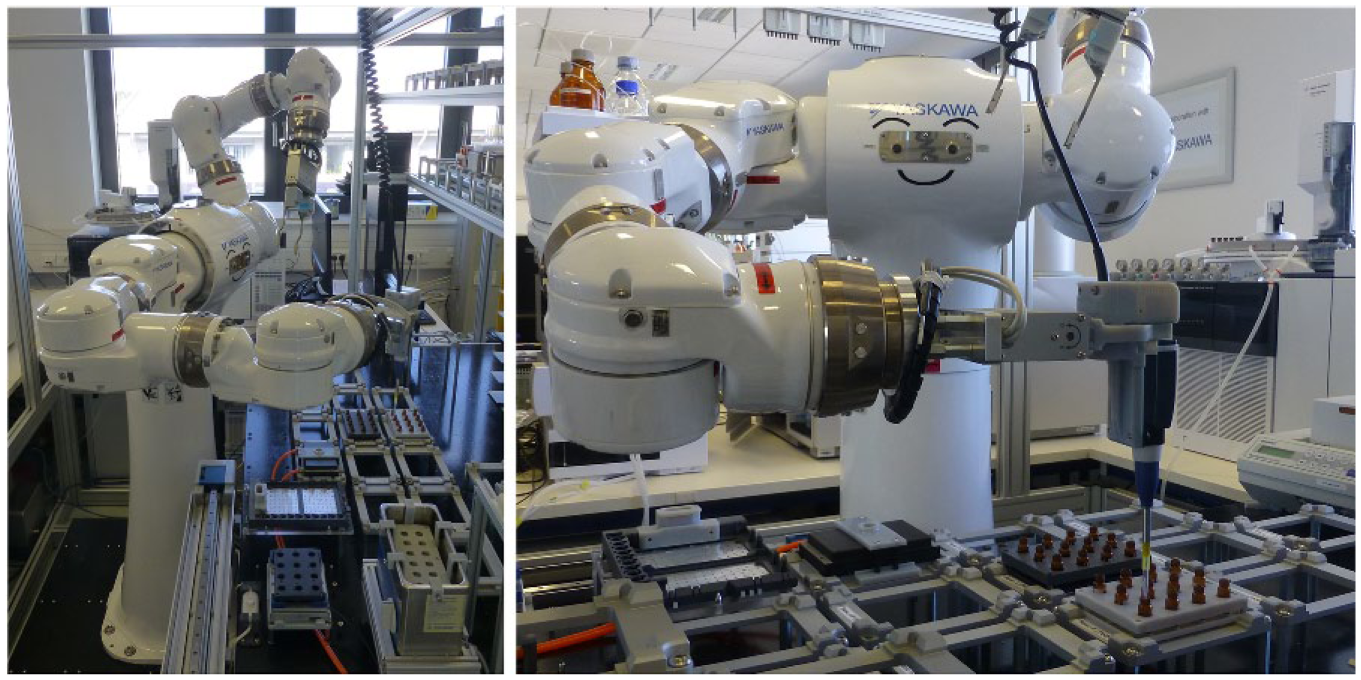
Left: Automation system with the dual-arm robot SDA10 and workbench. Right: Robot performs a pipetting process.
Future Challenges
In general, the analysis and the data evaluation are the last steps in analytical measurement processes. The sample preparation prior to the analytical subprocess is the most complex, most time-consuming, and most challenging part in automation. The translation from the manual to the automated process requires utmost care and precision, especially for processes with multiple sample preparation steps.
Future tasks involve reaching an increased robot speed and a higher flexibility by workflow optimization. Fast and intelligent data evaluation will grow in importance to increase the sample throughput.5–8 Apart from this, the combination and assignment of measurement results from different measurement devices to one sample is an upcoming field of research. 9 The automation system presented will have a contribution to further investigations in the field of automating analytical measurement processes.
Footnotes
Acknowledgements
The authors wish to thank Heiko Engelhardt, Lars Woinar, Dipl-Ing, Steffen Junginger, PhD, and Wolfgang Schuberthan, BEng, for their technical support and suggestions while working on the original study.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the Federal Ministry for Economic Affairs and Energy (BMWi) in Germany (FKZ: ZF4066003DB6).