
Abstract
Automation systems with applied robotics have already been established in industrial applications for many years. In the field of life sciences, a comparable high level of automation can be found in the areas of bioscreening and high-throughput screening. Strong deficits still exist in the development of flexible and universal fully automated systems in the field of analytical measurement. Reasons are the heterogeneous processes with complex structures, which include sample preparation and transport, analytical measurements using complex sensor systems, and suitable data analysis and evaluation. Furthermore, the use of nonstandard sample vessels with various shapes and volumes results in an increased complexity. The direct use of existing automation solutions from bioscreening applications is not possible. A flexible automation system for sample preparation, analysis, and data evaluation is presented in this article. It is applied for the determination of cholesterol in biliary endoprosthesis using gas chromatography–mass spectrometry (GC-MS). A dual-arm robot performs both transport and active manipulation tasks to ensure human-like operation. This general robotic concept also enables the use of manual laboratory devices and equipment and is thus suitable in areas with a high standardization grade.
Keywords
Introduction
In general, robots can be integrated into automation systems in two ways: they can be applied only as transport systems, or the robotic components can directly perform manipulation tasks. For many years, the latter option has been established in the field of industrial automation. The transfer and execution of a manual process using a robotic component is the main task of an industrial automation system. The human arm and hand should be replaced and the human abilities reproduced by using a technical system. Examples can be found in the automotive industry, precision engineering, food processing, heavy mechanical and electromechanical engineering, and medicine. 1
With respect to the processes to be automated, single-arm or dual-arm robots are used. Usually, large workpieces (e.g., in automotive manufacturing) are handled and manipulated using one or more single-arm robots. 1 Today, dual-arm robots have gained importance. Applications are in the field of industrial manipulation tasks 2 for assistance and support of people with health challenges,3,4 as well as in the field of laboratory automation.5–7 Dual-arm robots enable execution of two or more processing tasks in a limited workspace without any additional transportation system. Smith et al. 2 describe three operation modes. In noncoordinated operation, each arm performs a separate, from the other arm independent process. For example, one arm stacks workpieces and the second arm creates a welding seam. In goal-coordinated operation, both arms are involved in one process. For example, both arms are used for packing workpieces in the same box. The third mode is called coordinated bimanual operation, which is used when both arms are required to execute a process. For example, both arms lift and transport a large workpiece or a human. 2
The application of robots for transportation tasks can be mainly found in industrial stock management. Besides the transportation of objects between two or more stations, the robotic components also perform the taking and handing over of transportation objects. In contrast, processes in laboratory automation require both robotic manipulation components and transport systems.
Robot-Based Automation Systems in the Life Sciences
Since the beginning of the automation of processes in the life sciences, suitable robot-based automation concepts have had to be developed to realize full automation. In this highly developed industry, automation robots are used for manipulation tasks such as welding. In contrast, in laboratory automation robots are used as transportation systems. One reason is the high flexibility of life science processes, which also has to be provided by automated systems. Industrial systems are often designed and realized for a special application and are used over several years without major redesign. Industrial robots undertake specific tasks such as welding, painting, screwing, and polishing. 1
In contrast, an essential objective of the automation of processes in the life sciences is the development of systems, which provide a broad functional scope for biological, chemical, and analytical processes. Depending on the functional scope of the systems, various applications can be performed on one system. This is possible with strong hierarchical system development. The robot is used as a central system integrator, which represents simply a transport element and provides the sample and labware transport between different partial stations of an automation system. Autonomous intelligent devices perform manipulation tasks such as dosing, pipetting, heating/cooling, shaking, opening/closing, and data acquisition. The advantage of such systems is the simple design and the simple programming (teaching) of the robot, since the robot performs only transportation but no manipulation tasks. The manipulation devices have to be adapted to the robotic handling, to ensure that the robot is automatically taking and handing over samples and labware. In general, classical laboratory devices are not suitable, since they are optimized for manual operation. Integration into an automation system requires an adaption of the existing devices or the development of complete new devices. Both options often involve considerable costs. The transfer from a manual operation to an automation system often requires an adaptation of the processes. Any change in the method is a significant problem in highly regulated areas such as DIN (German Institute for Standardization, Deutsches Institut für Normung), ISO (International Organization for Standardization), or EPA (Environmental Protection Agency) norms, and thus analytical processes still have a very low degree of automation. 8 Each method of modification requires a new validation and approval of the processes, which is connected with considerable costs in addition to the costs of the automation system. In contrast, appropriate bioscreening systems (e.g., in the field of drug development and drug discovery9–13 and agricultural sciences 14 ) have been established for many years.
Flexible Robots in Analytical Measurement Technique
The use of robots for performing specific manipulation tasks is the state of the art in industrial applications. Up to now, this kind of automation has not been enforced in the life sciences. Reasons are the variety and the frequent change of the tasks to be performed as well as the different and fluctuating sample numbers.
With the development of modern dual-arm robots, this concept becomes more and more important for the automation of processes in the life sciences. The dual-arm robot also has the functionality of a transport element. The transport between the different stations is performed in the same manner as in the classical concept of laboratory automation. In the simplest way, the laboratory device will be adapted for robot operation, requiring additional costs as mentioned before. Alternatively, the end effectors of the arms are designed to perform the same actions like a human hand (e.g., pressing buttons or opening/closing drawers). Consequently, besides transport tasks, dual-arm robots are able to perform typical laboratory tasks with devices and tools, which are used in manual processes. Only the construction of suitable adapters is necessary for handling and safe grasping of laboratory devices such as pipettes, control buttons, covers, and doors. The operation of the instruments and laboratory devices is performed analogous to the manual processes by using programmed motion sequences.
Systems with integrated dual-arm robots may be generally designed with a fixed-position robot, which is surrounded by a workbench with devices and materials needed in the automated process. Such a design offers the advantage to automate life science processes by using classical laboratory devices and equipment. On one hand, this will reduce costs for special stations, which potentially occur in designs with a conventional central robot. On the other hand, a 1:1 automation can be reached. This means that a total automation of processes analogue to the manual procedures without changing or adapting the workflow is possible. The essential difference is the takeover of the activities of a human operator by the dual-arm robot. Therefore, such robot concepts are suitable in areas with a high standardization grade. Due to the identical automated processes, renewal and reapproval of the methods used can be avoided.
In this study, an automation system using a dual-arm robot is presented in the field of chemical analysis. The robot is flexibly used for automated processes in sample preparation and also in feeding the analytical instruments, such as mass spectrometers coupled with liquid and gas chromatography (LC-MS, GC-MS). Chu et al.6,7 present an automated process using this system for rapid determination of the enantiomeric excess using mass spectrometry. In this study, the system was significantly extended for sample preparation and determination of cholesterol using GC-MS in human samples. The application background, the system concept, the realized setup, and the achieved results are presented.
Determination of Cholesterol in Biliary Endoprosthesis
Diseases of the bile ducts are characterized by a high complexity and a high morbidity and mortality rate. 15 The most common diseases of the bile are gallstones (cholelithiasis) as well as inflammation of the gallbladder (cholecystitis), bile ducts (cholangitis), and the pancreas (pancreatitis). Gallstones are crystalline concretions, which are formed in the gallbladder by an accumulation of bile components. 16 There are different types of gallstones: cholesterol stones, calcium bilirubinate gallstones (also called pigment stones due to their dark coloring), and mixed stones. The cholesterol content is about 10% to 80% depending on the stone type.
Gallstones, acute or chronic inflammation of the pancreas or the biliary tract, the removal of the gallbladder, benign tumors, or radiotherapy may cause a narrowing (stenosis) or the closure (obstruction) of the biliary tract. 17 Bile duct carcinomas (adenocarcinomas) or carcinomas of the pancreas (pancreatic cancer) may cause malignant strictures. 18 Such strictures or obstructions in the biliary system require the use of biliary endoprostheses or biliary stents to ensure the drainage of the bile. 19 These have been used since the late 1970s and became an established method within the next decade.20–24 The endoscopic implantation of biliary stents rarely leads to complications; the mortality rate is very low.25,26 However, there is a major problem with this type of therapy: sediments accumulate to a complete closure inside the stent, which requires replacement of the stent and thus a new medical procedure for the patient.18,19,27,28 Factors that favor the formation of incrustations inside the stent are still unclear. 29
An analysis of the stent deposits showed that they contain mainly bacteria, yeast cells, and plant fibers from food residues. 30 Furthermore, bacteria may speed up the closure process, 19 and the stent material may also influence closure.27,31–33 In addition, cholesterol crystals have been found, but none of the three different types of gallstones.34,35 Cholesterol has been determined with content around 10% of dry matter. 32 Moreover, the content of cholesterol also has been determined within the stent material. The results have led to the assumption that cholesterol not only accumulates on the surface but also diffuses into the material. 27 Since the role of cholesterol in the closure of the biliary stent is not fully understood, a specific qualitative and quantitative analysis of this compound is required. Gas chromatography (GC) is the most used analytical technique for the determination of cholesterol using mass spectrometric (GC-MS) or flame ionization (GC-FID) detectors and a sample derivatization.36–39 In contrast, a simple method for quantifying cholesterol in meat and meat products by GC-FID without prior evaporation or derivatization has been reported. 40 In addition to the analysis using gas chromatography, the determination of cholesterol by liquid chromatography is possible. 41 Automated systems require fast analytical methods, which can be easily integrated into an automation system. In this study, a mass spectrometric method without prior derivatization was developed and applied to the automation system.
Aims of Automation
In this application, almost all subprocesses are highly automated. Only some manual steps are required in the beginning of the sample preparation. These include the removal of encrustations from the stents and drying, milling, and weighting the solid samples. All further steps can be automated. The first subprocess is a pipetting procedure to add the solvent and the internal standard to the solid samples. The second subprocess is the extraction of the analyte from the sample matrix using an ultrasonic bath. This requires the integration of an ultrasonic bath in the automation system and a carrier for the sample vials (volume, 1 mL) for automatically exact placing and removing. The subsequent filtration process can also be performed automatically. To avoid purchasing a special filtration device, a dual-arm robot may perform this process by using manual equipment such as syringes with cannulas and syringe filters. The final subprocess is the dilution of the sample to reduce the analyte concentration according to the working range of the measurement device (e.g., GC-MS).
The transportation tasks involve an initial transport to provide the milled and weighted samples, standard solutions, solvents, and labware such as vials, caps, syringes, cannulas, syringe filters, and pipetting tips. Further transportation tasks are carrying the samples from and to the ultrasonic bath, feeding the autosampler of the measurement device, and disposing the samples measured.
The automation of the analytical process presented will avoid human failures or mistakes (e.g., pipetting errors, accidental interchanging of samples, or spilling of liquids). A 24/7 operation may be reached if the analytical instruments are also integrated into the automation system. Therefore, the initial transport to provide the starting material must be guaranteed, either in a manual or an automated way.
System Concepts and System Design
The automation system involves a fixed mounted central dual-arm robot, which is surrounded with a workbench. Classical laboratory devices, racks providing laboratory consumables, and analytical instruments are mounted on this workbench. The dual-arm robot is used for transportation tasks, active manipulation tasks for direct sample processing, and transfer of the sample solutions into the autosampler of the analytical device. The system was flexibly configured and programmed to provide the application of multiple methods and procedures. Besides the flexible robot, the automation system includes the following functional units: storage system, analytics, and safety. In classical laboratory automation systems, liquid handling and sample treatment are also available. In the automation system presented, the dual-arm robot realizes such tasks, and these units are not required. In the following section, the system design and the integrated laboratory and analytical devices are presented.
Flexible Robot
The dual-arm robot SDA10F with the control unit FS100 (Yaskawa, Kitakyūshū, Japan) is used for transportation and active manipulation tasks. Due to the humanoid design, this industrial robot can be applied in a wide range of tasks (e.g., part-to-part assembly, part transfer, feeding machines, packaging, and further handling tasks). On the basis of human-like movements, this robot is predestinated for applications in the field of laboratory automation. Each arm has seven degrees of freedom. Together with its base rotation axis, the robot has 15 degrees of freedom. The maximum load for each arm is 10 kg, with a repeatability of ±0.1 mm. Each arm can be used for different tasks. In addition, synchronized movements with both arms are possible. The gripper LEHF 20K2-48-R86P5 (SMC Pneumatik, Egelsbach, Germany) is mounted on each arm; the fingers for these grippers are different depending on the main tasks of the arm. Figure 1 shows the total system and its components.
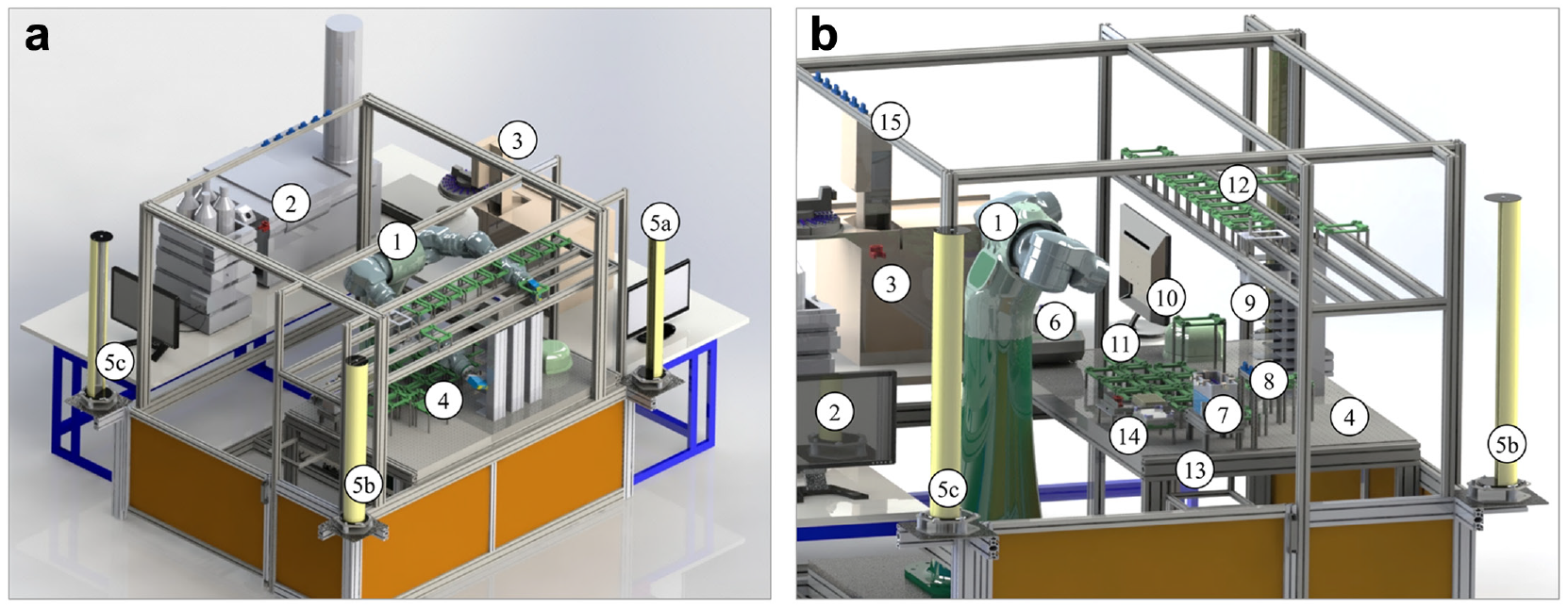
Automation system with a central and flexible dual-arm robot SDA10F (Yaskawa, Kitakyu- shu- , Japan) showing a (
Various robot movement types are available. The joint movement provides a synchronized point-to-point movement (PTP). The positioning times are adapted to the slowest axis, so that all axes finish their movements at the same time. The joint movement speed can be set in a range from 0.01% to 100%. In general, this movement type of the robot is not very suitable in a laboratory environment with a lot of devices and equipment mounted on the workbench. The tool center point (TCP) exactly reaches the destination, but the movement path is not controlled and depends on the used joint movement speed and is unpredictable. The same applies to the speed and acceleration on several axes. This may result in collisions with the laboratory equipment.
Another movement type is the continuous path (CP) movement with linear or circled paths. The TCP is exactly moved along a defined line or circle with speeds of 0.1 to 1500 mm/s or 1 to 9000 cm/min. Such operations require more movements of the robot joints compared to PTP movements. The working area and the speed may be decreased depending on the position of the axes, especially in narrow surroundings. Continuous path movements are predestinated for robot tasks in workpiece machining or in laboratory automation.
The dual-arm robot fulfills both transportation and active manipulation tasks. Suitable adaptions have been constructed to use manual laboratory equipment with standard and nonstandard shapes and formats. Different fingers are mounted on the robot grippers depending on their tasks. The left arm is used to handle labware in standard formats such as microtiter plates (MTPs), tip boxes, and liquid reservoirs. The fingers are made of metal on a plastic base. The metal fingers are equipped on their top with rubber for a better grip. The shape of the plastic base allows the handling of nonstandard single vials. The right arm handles single vials and caps, manual pipettes (Eppendorf, Hamburg, Germany) with different volumes, and glass pipettes and operates with laboratory devices and analytical instruments. This involves the opening/closing of the thermoshaker and the door of the high-performance liquid chromatography (HPLC) autosampler as well as starting the ultrasonic bath using a rotary button. Furthermore, the analytical devices are fed with samples by the robot. A sample tray with a maximum of 105 single GC vials or two MTPs is used for feeding the HPLC autosampler. The GC-MS autosampler is directly fed with single vials. Both arms work together in pipetting steps using manual pipettes and in opening/closing vials with screw caps, whereby one arm holds the vial and the other arm moves the screw cap. Figure 2 shows both grippers with fingers for the left and the right arms.
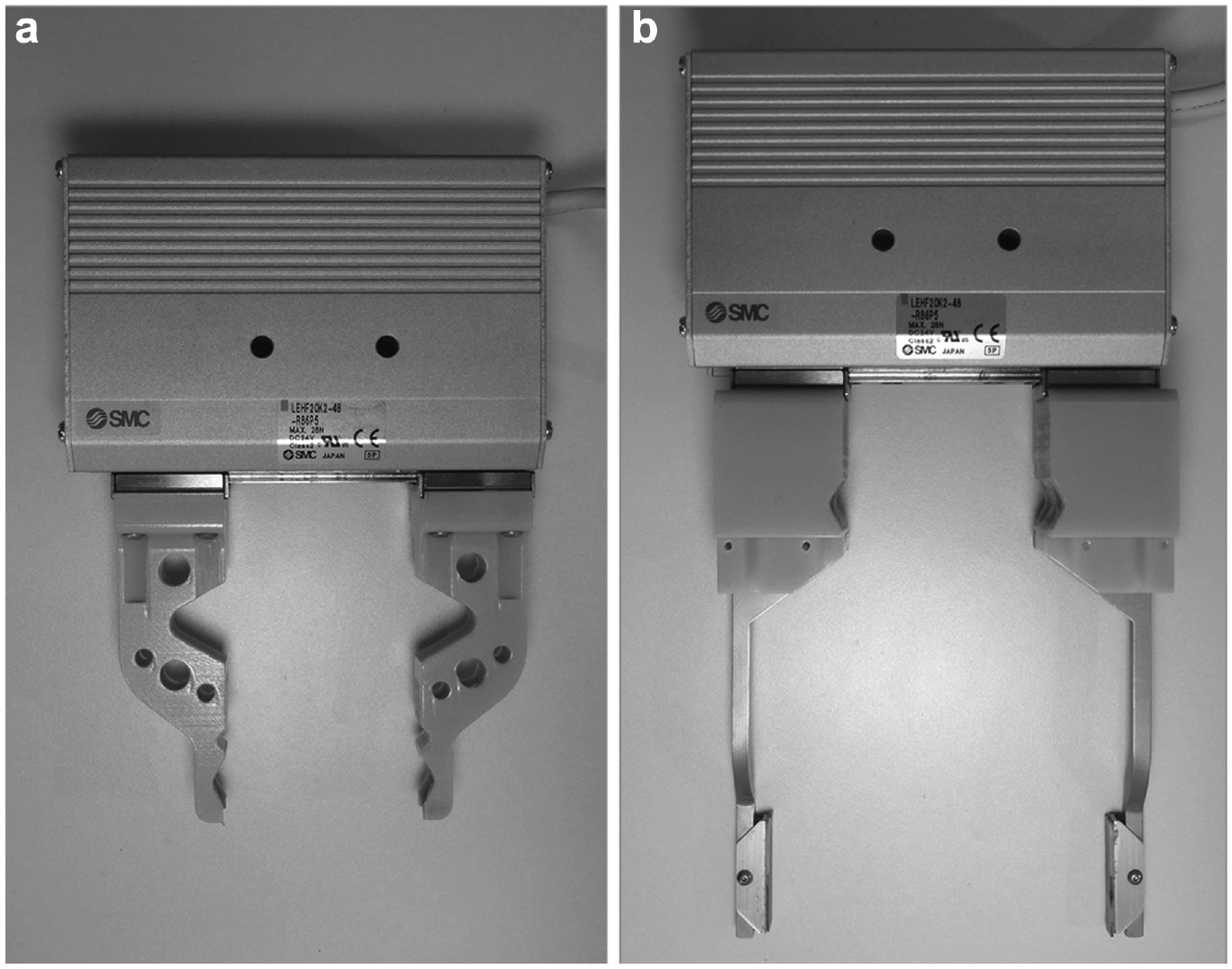
Gripper equipped with different fingers. (
For automated operation and efficient handling, racks and holders for sample vials have been constructed and crafted using a 3D printer. In the application presented, GC vials (volume, 1 mL) are used for standard and sample solutions. Solvents are provided in vials with higher volumes up to 22 mL. All racks are dimensioned in the standardized MTP format.42–46 Figure 3 shows racks for 12 GC vials and 12 caps to close these vials. In addition, in an extraction step, the sample solutions are treated using an ultrasonic bath. For a robot operation, a fixed positioning of the sample vials is necessary. To solve this issue, a frame for 12 GC vials was constructed and crafted with a 3D printer, which is mounted inside of the ultrasonic bath (see Fig. 3 ).
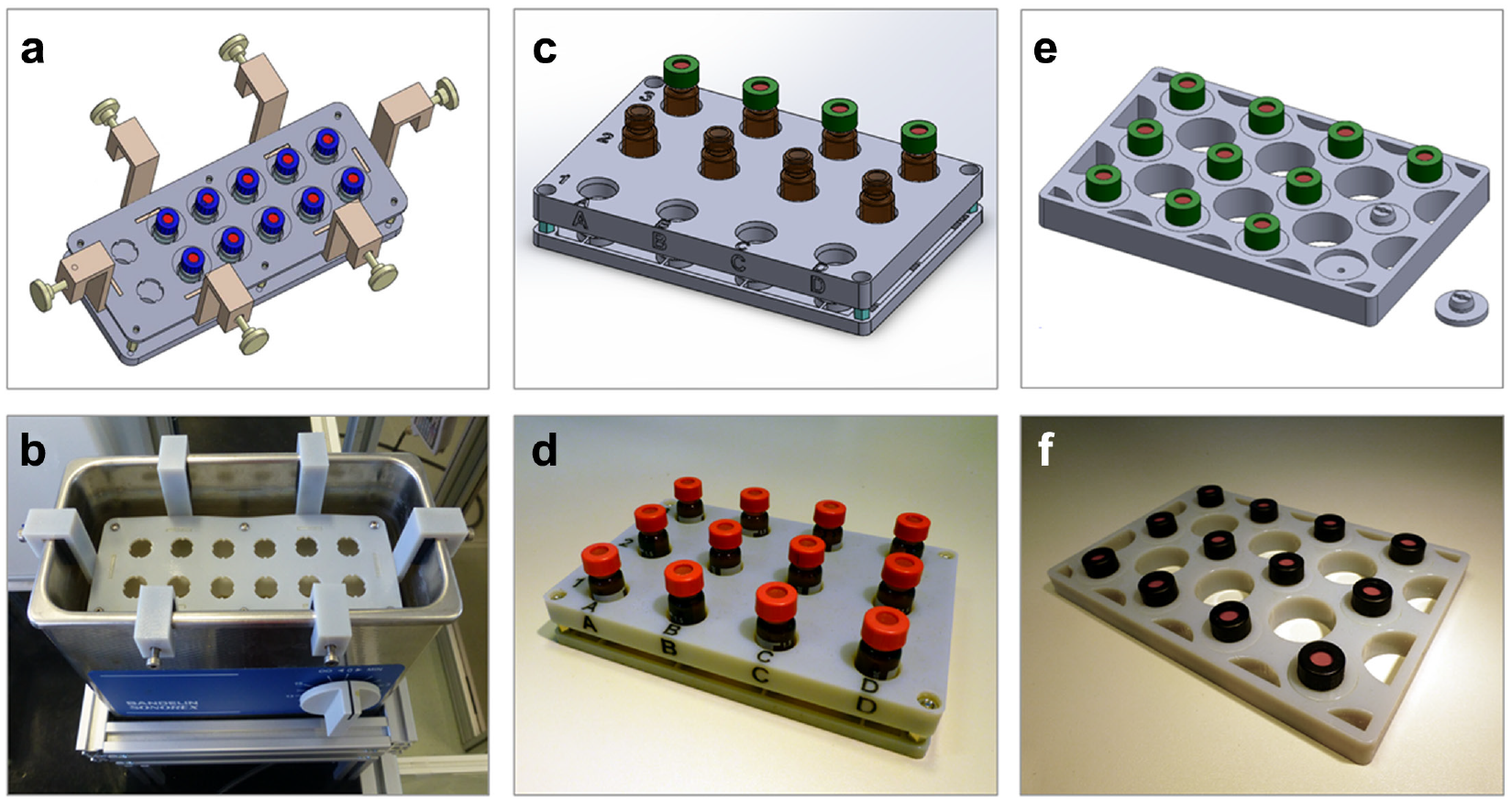
Sample frame for ultrasonic bath and racks in microtiter plate format for samples and caps (top: computer-aided design drafts, bottom: crafted racks with vials and caps). (
The pipetting process using manual pipettes also requires the construction of an adapter for safe gripping and handling. The adapter is used for both pipette handling using the robot and storing a pipette on the automation platform (see Fig. 1 ). In the pipetting process, the right arm picks up and holds the pipette, and with the side plate of the gripper, the piston of the pipette is moved down and up. These robot motions have been programmed according to human motions. Figure 4 shows the pipetting process using the dual-arm robot.

Pipetting with the dual-arm robot and a manual multichannel pipette.
Another process using manual equipment is filtration. Natural samples often contain impurities or particles, which requires a filtration before an injection into the analytical device. Special racks in the MTP standard format were designed and crafted. This involves a rack for 12 single-use syringes, with the particularity of an oriented position of the syringes. This enables easy handling with the robot using the lateral flaps to increase the stability. Additional racks were built for 24 cannulas and 24 syringe filters. Figure 5 shows the computer-aided design (CAD) drafts and the final racks equipped with labware. All racks are manually filled with the labware required in the sample preparation method and provided in the storage system on the workbench.
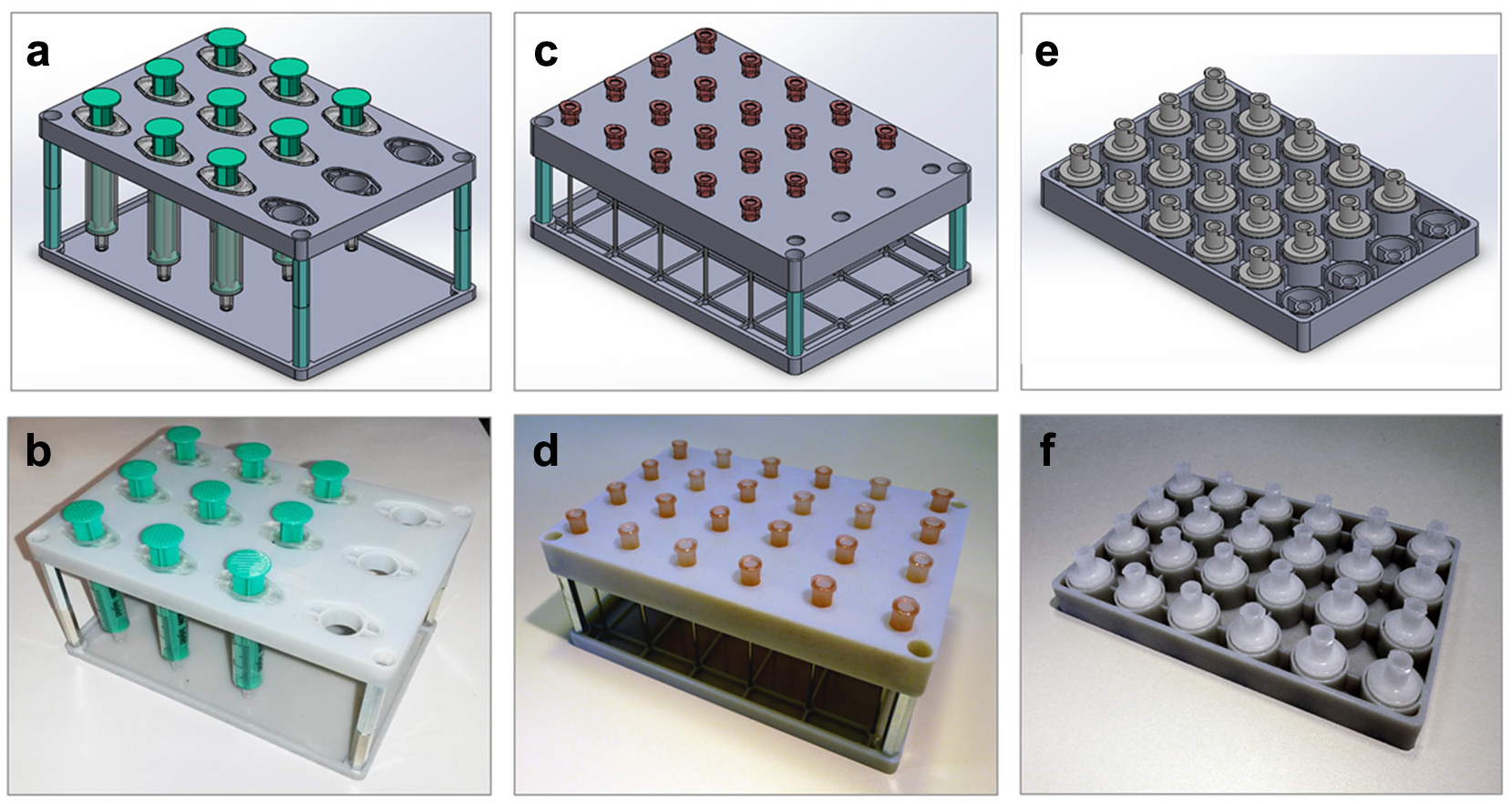
Racks for labware required in automated filtration (top: computer-aided design drafts; bottom: crafted racks with labware). (
Storage System
Standard solutions, solid samples with a defined weight, and solvents are manually provided in single vials made of glass on special racks in the MTP format. These racks and further labware, including pipette tips, empty vials and caps, syringes, cannulas, and syringe filters, are stored on defined positions on the storing system on the workbench. This storing system is divided into two levels. The lower level involves three storage racks, each with eight positions for a rack in the MTP format. The higher level includes automated labware positioners (ALPs) for labware with different heights such as pipette tips over the whole width of the workbench.
Analytics
The determination of the concentration of cholesterol in the prepared stent samples is performed using a GC-MS with a triple quadrupole detector (GC-QQQ) (Agilent Technologies, Waldbronn, Germany). The sample solutions are transferred into the analytical system using an integrated autosampler and an injector device. The autosampler is directly fed using the dual-arm robot. The data evaluation is automatically executed after completing a measurement series using the device software and an additional web application tool.47,48 For more flexibility in the applications, an HPLC-MS with a time-of-flight analyzer also is available (Agilent Technologies). The dual-arm robot can also feed the HPLC autosampler with samples. 7
Safety
An unauthorized entering of the automation cell during a running process may cause hazards to individuals or materials. Humans are able to enter the cell at two sides of the automation cell; both analytical instruments block the other sides. A light curtain with noncontact optical sensors (OY245S; ifm electronic, Essen, Germany) is installed at both critical sides to prevent accidents and damage to objects (see Fig. 1 ). 49 Upon interruption of a light beam or multiple light beams by a person, the output signal-switching device (OSSD) is turned off and the robot is stopped. The transmitter and receiver units are connected with a deflection mirror, whereby the beam areas are arranged orthogonally to each other.
Materials and Methods
Cholesterol (≥99%) and 5α-cholestane (≥97%) were purchased from Sigma-Aldrich (Steinheim, Germany), as well as the solvents hexane and toluene in HPLC grade and dichloromethane (≥99%) from Carl Roth (Karlsruhe, Germany). The GC-MS system consists of a triple quadrupole mass analyzer (G7000A) with a G7010 upgrade and the gas chromatograph 7890A (Agilent Technologies, Waldbronn, Germany). Data acquisition and data preprocessing were performed using the following software: MassHunter for GC-MS B.07.02., MassHunter Qualification B.07.00, and MassHunter Quantification for QQQ B.07.00 (Agilent Technologies, Waldbronn, Germany). For automated data evaluation, the software Analytical Data Evaluation (ADE) was integrated and used (celisca, Rostock, Germany).47,48
The biliary endoprosthesis samples were manually cut into pieces of 2 to 3 cm in length and then cut in half. The incrustations were taken and dried at room temperature to constant weight. The dried samples were fine milled using a mortar and kept in a cold (4 °C) and dark store in plastic tubes until analyzed. To extract cholesterol, a 1-mg sample was weighted and 1 mL hexane was added. The internal standard 5α-cholestane was added to a final concentration of 100 µg/L in the sample solution. The extraction was performed using an ultrasonic bath for 5 to 10 min. Subsequently, the samples were filtrated using syringe filters (pore size 0.45 µm) to get a pure sample solution. Prior to the analysis, the samples were diluted in a ratio of 1:10 (v/v) or 1:100 (v/v) depending on the expected concentration of cholesterol.
The calibration of cholesterol was created in the range from 500 µg/L to 3 mg/L. The determination of the cholesterol concentration using GC-MS was performed with the following parameters. Helium was used as a mobile phase. The stationary phases were a HP5MS column and alternatively a DB17 column, both from Agilent Technologies. The samples were injected with a volume of 1 µL, a split ratio of 1:1, and an inlet temperature of 280 °C. The column flow rate was 1.2 mL/min. The heating program started with a temperature of 200 °C with a hold time of 5 min, followed by a temperature-time ramp of 10 °C/min to 270 °C with a hold time of 1 min and a further temperature-time ramp of 20 °C/min to a final temperature of 290 °C with a hold time of 2 min. The mass spectrometer was used with the following parameters: 290 °C transfer line temperature, 230 °C ion source temperature, 150 °C quadrupole temperature, and a 5.0-min solvent delay. The data acquisition was performed in the SCAN mode with a mass range of 50 to 500 m/z and a scan time of 200 ms. Alternatively, the SIM mode was used with a dwell time of 250 ms with the following target ions for cholesterol: 386 (quantifier) and 275, 301, and 368 (qualifiers). To identify the internal standard 5α-cholestane, the following target ions were used: 217 (quantifier) and 262, 357, and 372 (qualifiers).
Results and Discussion
Process Workflow
In the scope of the initial transport, the weighed solid samples, the calibration stock solution, and the solvent are provided in glass vials on racks in a standard microtiter format in the storage system on the workbench. In addition, empty GC vials and caps, syringes, cannulas, and syringe filters are also provided in this storage system. The pipetting tips are stored in the storage system on the second level. Prior to the several subprocesses, the dual-arm robot picks up the required racks and transports them to defined ALPs on the workbench. In the next step, solvent is added to the solid samples by the dual-arm robot using manual pipettes. Subsequently, the robot closes the vials with screw caps. The next steps are related to the extraction procedure: the glass vials with samples are treated in the ultrasonic bath and shaken. The ultrasonic treatment is started using the robot, which operates the rotation knob. This knob is rotated in a defined angle corresponding to the treatment time. Subsequently, the samples are shaken for several minutes. The robot transports the samples on a rack to the shaker and starts and stops the operation after the shaking time by pressing a switch.
After the extraction time, the samples are filtered to get a pure sample solution for analysis using the GC-MS. Therefore, the dual-arm robot removes the caps from the vial, picks up a syringe and a cannula, aspirates the sample solution, drops the cannula in a waste container, picks up a syringe filter, and dispenses the sample through the filter. The syringe with the filter is finally dropped into the waste container.
In the last step, the samples are dissolved with CH2Cl2. The dual-arm robot closes the vials with caps and individually transports them to the GC autosampler. After the analysis, the data evaluation process is started. All subprocesses are identically performed with the dual-arm robot as in the manual procedure, and the same laboratory equipment is used. Figure 6 shows the simplified process workflow.
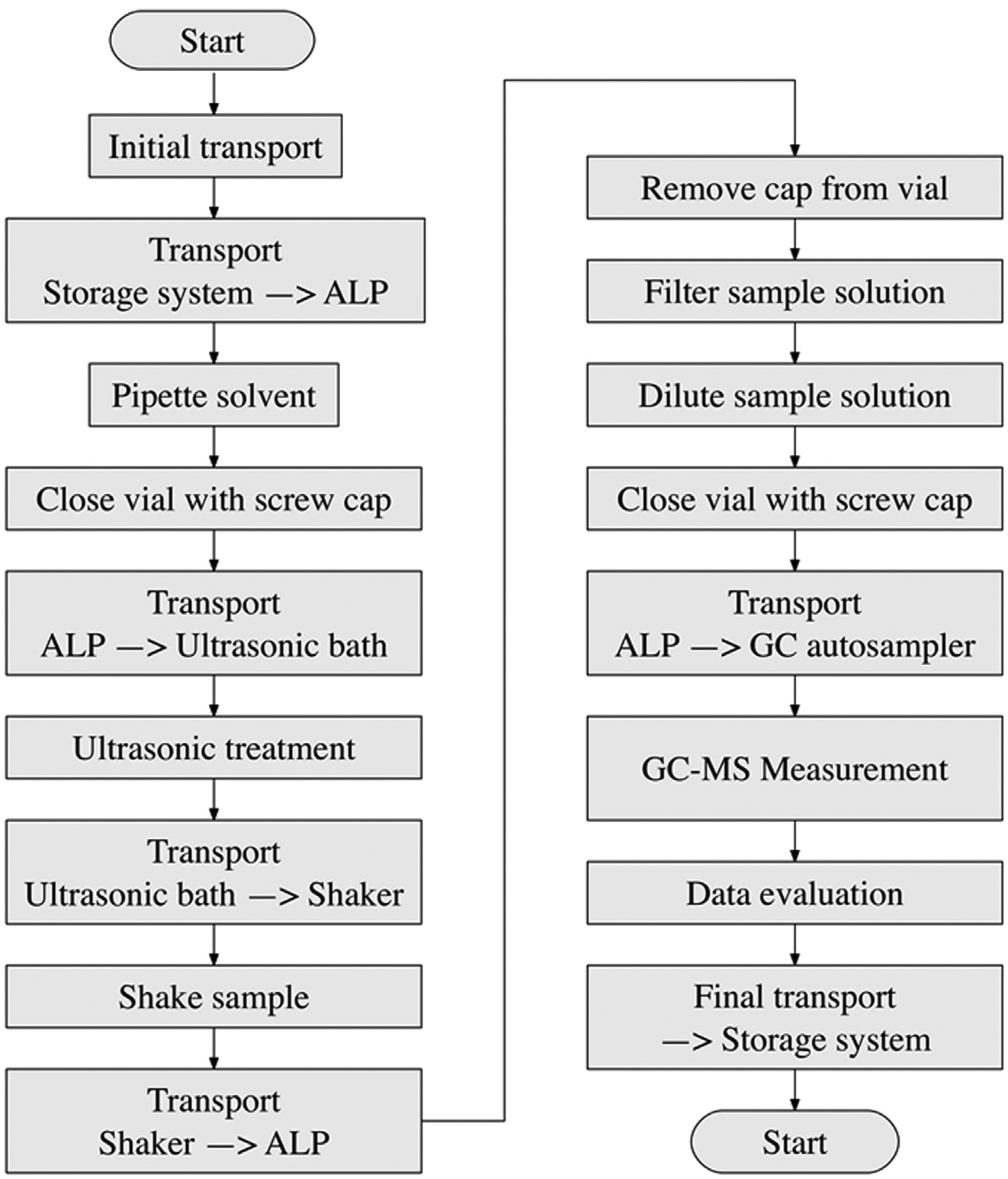
Simplified visualization of the general process workflow. ALP, automated labware positioner; GC, gas chromatography.
Automation Control
With online robot programming (also called teaching), robot jobs are generated, which are relatively stiff and inflexible, since the movements and the positions are fixed. This may result in a higher programming effort, especially for changing the process or the labware positions. In contrast, offline programming using associated software and a 3D model of the robot provides a higher flexibility of the robot jobs if a modular job design is used. 50 This means that recurring movement processes are encapsulated using position variables and relative position references. A fixed arrangement of the used laboratory equipment in the robot periphery using ALPs is a required precondition. The aim was to create flexible robot jobs, enabling a repeated use of tasks most frequently performed at any desired position in the working area. This involves flexible pipetting steps, transportation tasks, and processes such as opening/closing vials or doors.
To reach such a high flexibility, the dual-arm robot was online programmed using the controller FS100 with the menu-assisted programming language Inform III and offline programmed in C using the Motoman SDK from Yaskawa. Task-specific robot motion modules based on motion frames have been defined and implemented. A motion frame consists of a sequence of different motions. The parameters of these motions are defined using position variables. The use of relative variables enables the operation of a motion frame on different positions such as different ALPs. Therefore, a reference point on the hardware (e.g., an ALP) is required for initialization of the motion frame and for the calculation of the absolute positions using relative position variables. For each task, a source and a destination position are required. The motion frames and a modular program design enable a flexible realization of any transport and manipulation task.
Measurement Results
The calibration for the determination of the cholesterol concentration can be created using the dual-arm robot (concentration range from 0.5 to 3 mg/L). An internal standard (α-cholestane) was added to the samples for correction of variations caused by the sample preparation process. Figure 7 shows the signals of cholesterol and the internal standard in a sample solution. For optimization, two different stationary phases were tested: one universal phase and an optimized phase for sterols. In the first step, the manual procedure was evaluated using the universal column HP5MS. A repeatability of 6.72% was reached, and the recovery rate was in the range of 90% to 115%. Future steps are the evaluation of the manual procedure using the stationary phase DB17, the evaluation of the automated process, and a comparison of them.
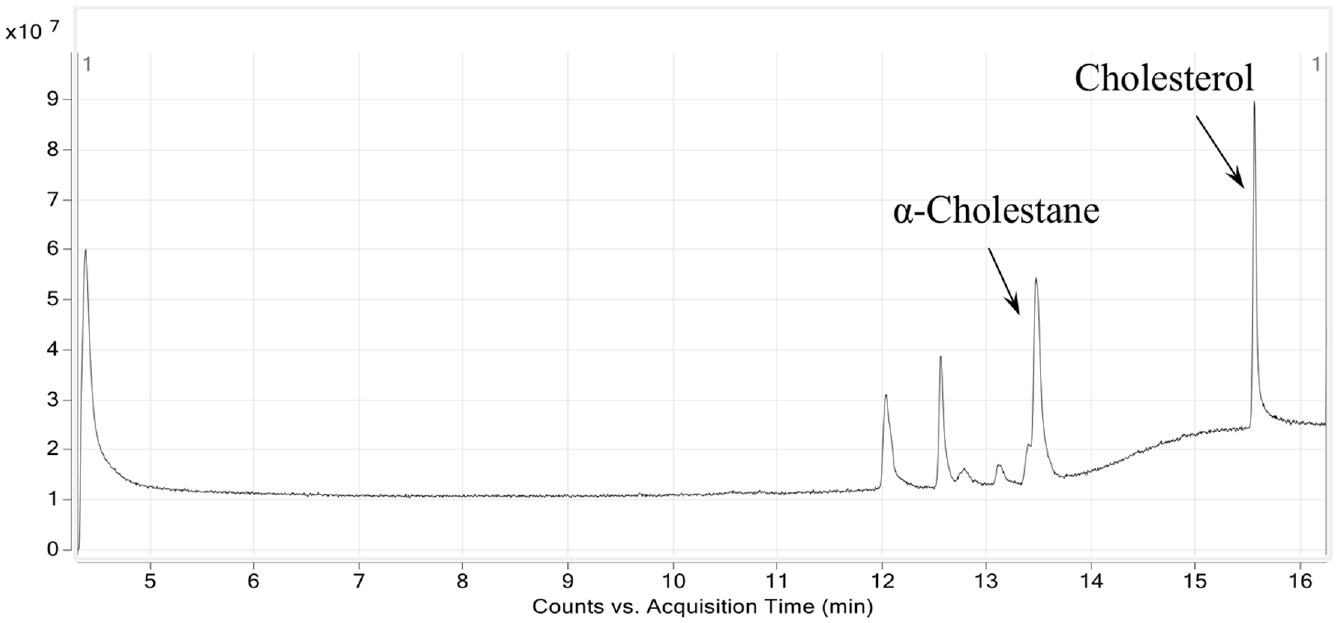
Chromatogram of a sample with 2.5 mg/L cholesterol and 0.1 mg/L α-cholestane (internal standard).
Comparison of the Manual and Automated Processing Time
The time requirements were determined for the manual and the automated process, and the results were rounded to full minutes. The extraction (15 min for 12 samples) and measurement times (26 min per sample) are identical, but there is a difference in the sample preparation time. The pipetting processes mainly cause the different processing times (manual: 24 min for 12 samples; automated: 124 min for 12 samples). Manual pipetting is performed with variable adjustable pipettes. In contrast, the dual-arm robot uses various pipettes with preadjusted volumes. Although the current process requires more processing time compared to manual jobs, it is possible to run the system in 24/7 mode, which leads to a higher total number of samples that can be processed in total. Further reduction of the processing time can be achieved with changes in the pipetting regime (e.g., using other pipettes, using more pipettes with different volumes, or advanced scheduling of pipetting steps).
In conclusion, automation systems in the field of chemical analytics are only applied in proprietary designed processes, which are characterized by inflexibility and the need for special automation equipment such as liquid handlers. To fill this gap, an automation system using a flexible dual-arm robot was designed and put into flexible operation for analytical tasks using LC-MS6,7 and GC-MS. In this study, the automation system was adapted for transport and active manipulation tasks for the determination of cholesterol in biliary endoprosthesis using GC-MS. The system enables a 24/7 operation, if the system is fed with sufficient numbers of labware and starting material. A fully automated sample preparation is possible using a dual-arm robot and manual laboratory devices and equipment. The dual-arm robot performs all processing steps identical to the manual procedure due to its human-like motions. This involves liquid handling (e.g., sample dilution), extraction using ultrasonic treatment and shaking, filtration using syringe filters, and transportation tasks and feeding the autosampler. The overall process is controlled by process control software, including the dual-arm robot and the measurement device. Furthermore, a fully automated data evaluation can be provided using the instruments’ software and an additional software module, Analytical Data Evaluation (ADE).47,48 Future tasks are the determination of the system precision with various analytical applications for an extended comparison of the manual and the automated procedures. The automation system should be integrated into a process control system, which enables a time-efficient process scheduling to decrease the processing times and therefore to increase the sample throughput. The analytical method we have chosen is the first example to demonstrate the general possibilities of the system, including typical tasks in sample preparation. The system presented shows the application of processes to an automation system identical to the manual procedure, enabling the automation of processes in highly standardized areas.
Footnotes
Acknowledgements
The authors thank Heiko Engelhardt, Lars Woinar, and Dr. Thomas Roddelkopf for their technical support and suggestions. Furthermore, the authors thank the company Yaskawa for providing the dual-arm robot SDA10F and Wolfgang Schuberthan for technical support.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.