
Abstract
The combination of open-source software and hardware provides technically feasible methods to create low-cost, highly customized scientific research equipment. Open-source 3-D printers have proven useful for fabricating scientific tools. Here the capabilities of an open-source 3-D printer are expanded to become a highly flexible scientific platform. An automated low-cost 3-D motion control platform is presented that has the capacity to perform scientific applications, including (1) 3-D printing of scientific hardware; (2) laboratory auto-stirring, measuring, and probing; (3) automated fluid handling; and (4) shaking and mixing. The open-source 3-D platform not only facilities routine research while radically reducing the cost, but also inspires the creation of a diverse array of custom instruments that can be shared and replicated digitally throughout the world to drive down the cost of research and education further.
Introduction
The open-source (OS) movement has spread to science and has achieved success as a research accelerator for many disciplines. 1 However, unlike the zero marginal cost of replicating free and open-source software (FOSS), challenges of open-source hardware development arise from manufacturing costs. 2 To overcome this challenge, 3-D printing has enabled distributed digital fabrication because of the low cost of open-source self-replicating rapid prototypers (RepRaps), which are capable of printing more than 50% of their own parts. 3 With the technology progressively maturing, the RepRap project has created a distributed form of production with low-cost polymer-based materials, which commonly include polylactic acid (PLA), acrylonitrile butadiene styrene (ABS), and high-density polyethylene (HDPE). 4 Scientists in many fields have begun using RepRap 3-D printers to design, manufacture, and share the open-source digital designs of scientific equipment,5–7 including colorimeters, 8 nephelometers, 9 and turbidimeters; 10 phasor measurement units; 11 optics and optical system components; 12 liquid autosampers; 13 microfluidic handlers; 14 biotechnological and chemical labware;15–17 mass spectroscopy equipment; 18 automated sensing arrays; 19 DNA nanotechnology lab tools; 20 and compatible components for medical apparatuses such as MRI. 21 Sharing of digital designs brings researchers, educators, and citizen scientists state-of-the-art scientific tools at incredibly low costs. 22 These OS scientific tools are freely distributed and thus widely accessible for governments, universities, corporations, and laboratories at the cost of materials, which are generally between 90% and 99% less than the cost of conventional equipment. 6 These savings can be substantial; when scaled, for example, to the basic physics labs in U.S. universities and colleges, a $500 open-source optics setup replacing $10,000 of commercial equipment could save more than $43.7 million for the 4599 universities and colleges in the country. 23 Preliminary value analysis 24 indicates scientific research funders (e.g., National Science Foundation [NSF] and National Institutes of Health [NIH]) can obtain a return on such investments in the hundreds or thousands of percent. 25
To further drive down the cost of scientific research and harness the full capacity of open-source design, multiple research applications can be bundled together into a scientific platform. In this study, an open-source hardware approach is used to demonstrate an example of such a scientific instrument using a multifunctional platform derived from an augmented delta-style 3-D printer. The OS 3-D platform is operated in both a stationary tool mode and a mobile tool mode, depending on the function. In the mobile tool mode, the work piece is fixed in place just as conventional delta 3-D printers are used. In this mode, the platform is demonstrated as a 3-D printer capable of fabricating scientific components as discussed above, a laboratory auto-stirrer for chemical synthesis, and an automated analytical probe. This last function was demonstrated with a pH probe, but could utilize any scientific probe already in use that would provide additional useful data if controlled over the 3-D space (e.g., to test various samples in different containers or a single nonuniform sample). In the stationary tool mode (platform up), two scientific applications are demonstrated. First, automated fluid handling helps to maximize accuracy, precision, and throughput while minimizing researcher time and consumable costs. Finally, an extremely versatile and customizable laboratory shaker is provided, which can be used in chemistry and biology laboratories to stir liquids. Applications are demonstrated for compatible component fabrication in a variety of laboratory routines that can be applied in physics, chemistry, biology, medicine, and electronics laboratories.
Materials and Methods
The platform is derived from the MOST Delta RepRap 3-D printer. Modifications were made to the open-source design allowing the printer to be easily converted to a stage configuration (end effector up or stationary tool mode) in which the moving end effector is inverted with respect to the horizontal plane. 26 Tools that were too massive for the moving end effector are attached to the platform’s frame and the work piece (or substrate) is fixed to the moving end effector. The transformation is simplified with the use of magnet ball joints on the connecting rods, which are detailed in previous work. 26
A completely new firmware (Franklin) was written to control the platform since existing solutions are intended for 3-D printing (https://github.com/mtu-most/franklin). This firmware facilitates adjusting parameters for the various tasks demonstrated here or developed by others in an easy-to-use web-based interface. It also exposes a scripting interface permitting extensibility; for example, an interface was created for controlling the motion of the end effector using a mouse or game controller. All of the mechanical designs were completed with OpenSCAD (http://www.openscad.org/), a script-based CAD, and were written such that they were both modular and parametric. This allows tool holders to be easily and quickly customized such that new, additional capabilities can be realized in a much compressed timescale.
Magnetic tool mounts were designed and printed to permit easy swapping of tools. All of the designs were completed with OpenSCAD and were written such that they were both modular and parametric. The 3-D platform is controlled using Franklin firmware, which allows setting different parameters for each tool. Three-dimensional models are converted to a tool path with Cura (https://ultimaker.com/en/products/cura-software). Tool paths for stirring, fluid handling, and shaking were generated with the spreadsheet application Libre Office Calc (https://www.libreoffice.org/download/libreoffice-fresh/).
Results
Utilizing basic OpenSCAD designs, various tools, and holders were derived for both the mobile (end effector down) and stationary (platform with end effector up) configurations of the OS 3-D platform. Designs for the mobile tool mode include the magnetic mount for all tool heads, a 3-D printer end effector, and a holding unit for a stir stick or pH probe. The designs for the stationary tool mode include (1) a syringe pump for both extrusion of print media and fluid delivery, (2) a platform for mounting a 96-well plate, and (3) a fluid mixing platform and holder for flasks. Each of these was then demonstrated.
Mobile Tool Mode: OS 3-D Platform for Printing, Stirring, and Probing
As can be seen in Figure 1 , the platform can be used as a conventional RepRap 3-D printer. It can print some of its own parts (white and black components in Fig. 1 ) and scientific equipment, as well as any object able to be manufactured with conventional fused filament fabrication. The 3-D printing capabilities of the platform are comparable to other delta RepRaps. The system has a circular build area with a radius of 126 mm and a build height of 100 mm. Although the print speed is fast (with a maximum carriage speed of 40 mm/s), it is slower than the belt-driven delta RepRaps. This system, however, is more accurate. The end effector outfitted with a j-head hot end, as shown in Figure 1 , can be used to print with relatively low-temperature thermoplastics such as PLA using an unheated print bed covered with glass coated with a thin layer of adhesive from a common glue stick and ABS with a raft of PLA. If higher-temperature polymers are needed (e.g., polycarbonate or nylon), the hot end can be replaced with an all-metal alternative (e.g., a LulzBot Hexagon hot end). In addition, the microcontroller supports the use of a heated bed, which can be outfitted with a number of coatings (e.g., polyetherimide [PEI]) to assist in bed adhesion.
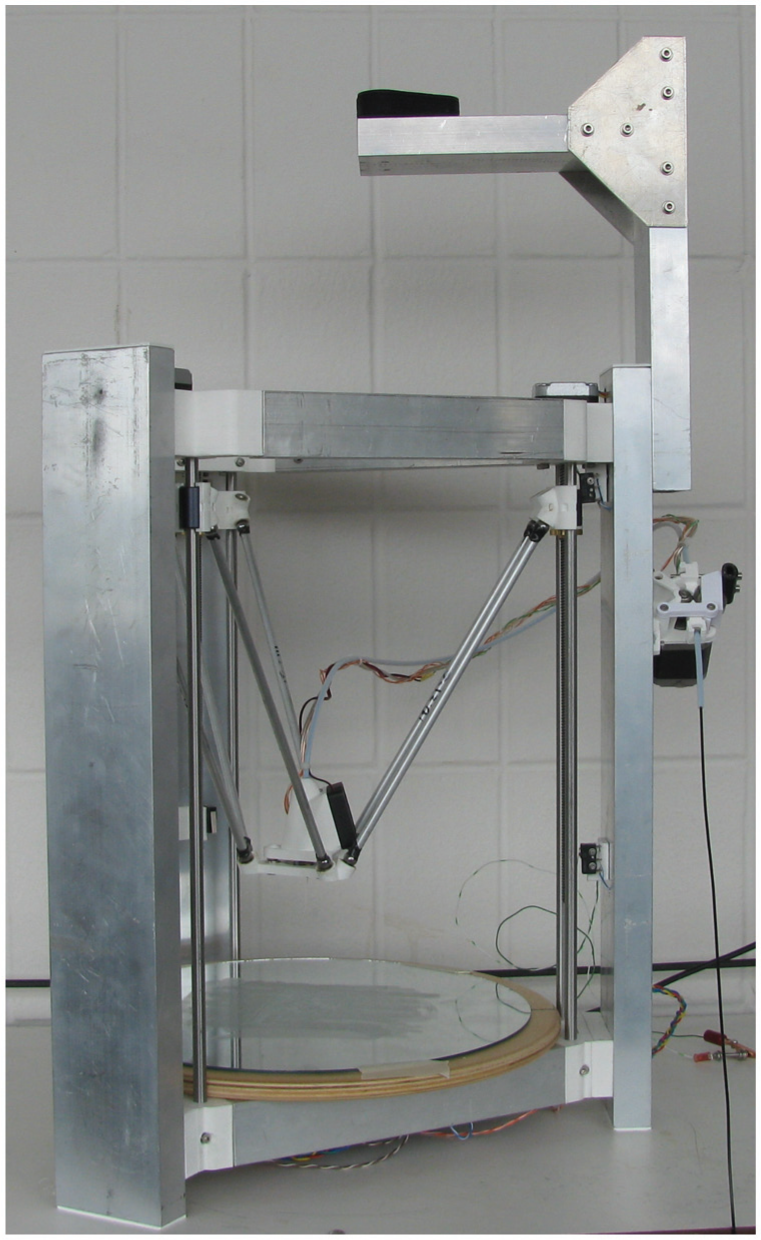
OS 3-D platform with effector down for polymer 3-D printing.
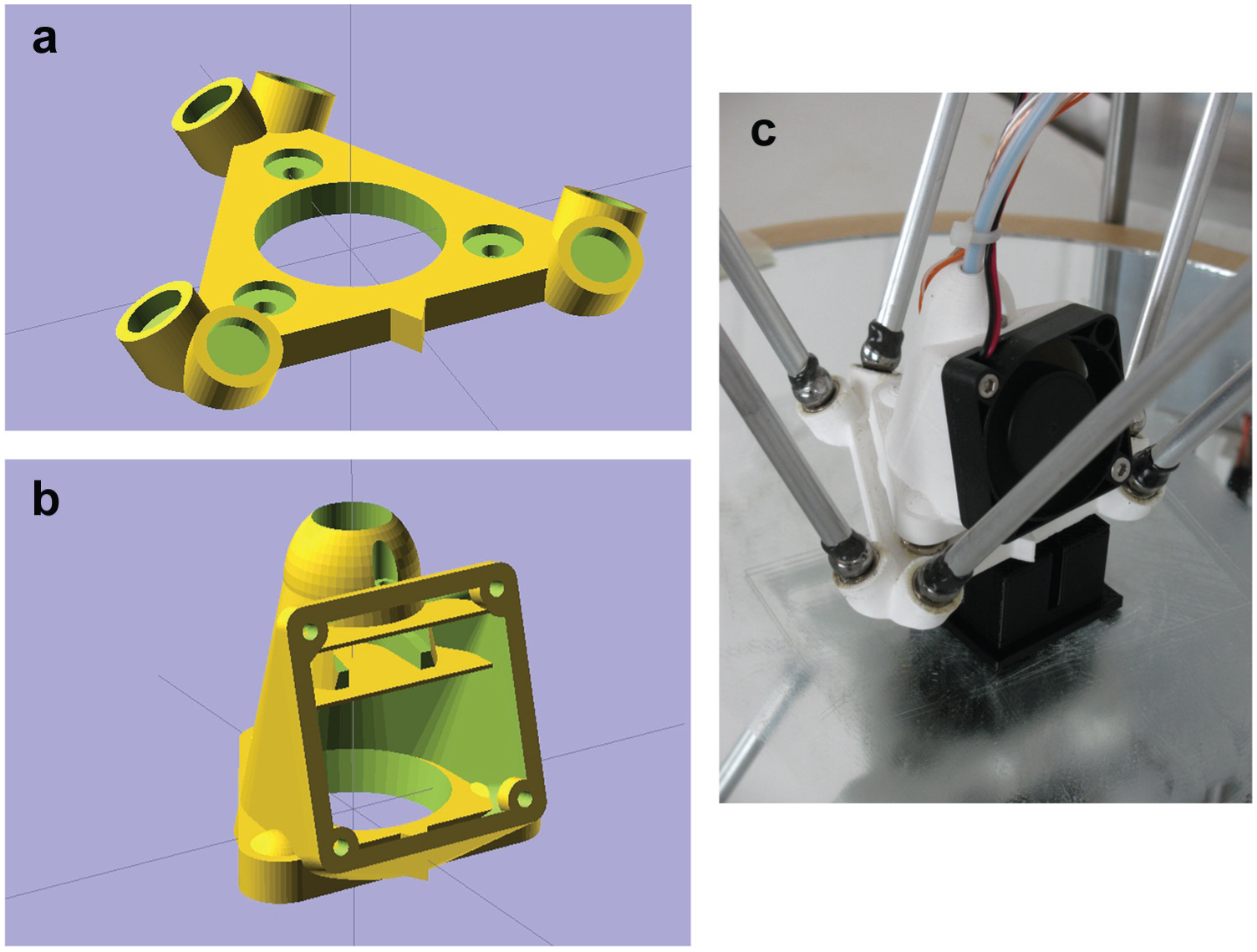
As described in the introduction, with the effector down in the mobile tool mode, the OS 3-D platform can be used to automate other routine scientific tasks. To switch between modes and tools quickly, a magnetic end effector ( Fig. 2a ) was designed that attaches magnetically to both the tie rods and the tool heads, such as the 3-D printer head assembly (design shown in Fig. 2b ). Figure 2c shows a close-up view of the 3-D printed and assembled end effector being using to print a component of an open-source water testing platform. 9
(
The OS platform can be used to automate stirring for chemical reactions or combining stirring, probing, and dynamic measuring such as is demonstrated with auto-stirring with a pH probe, as shown in Figure 3 . In addition, the OS 3-D platform can be positioned over the reaction taking place in a controlled environment (e.g., for temperature by placing on a hot plate or in an ice bath).
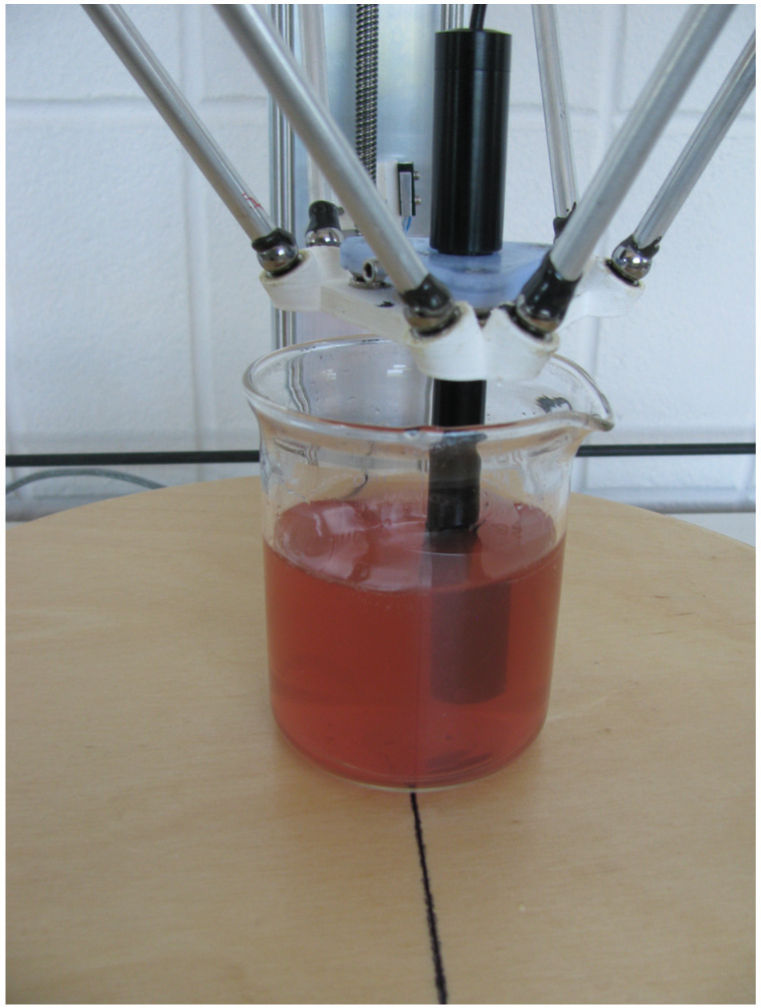
PH probe being used as active stir stick in beaker.
Stationary Tool Mode of OS 3-D Platform: 3-D Printing of Viscous Materials, Shaking, and Fluid Handling
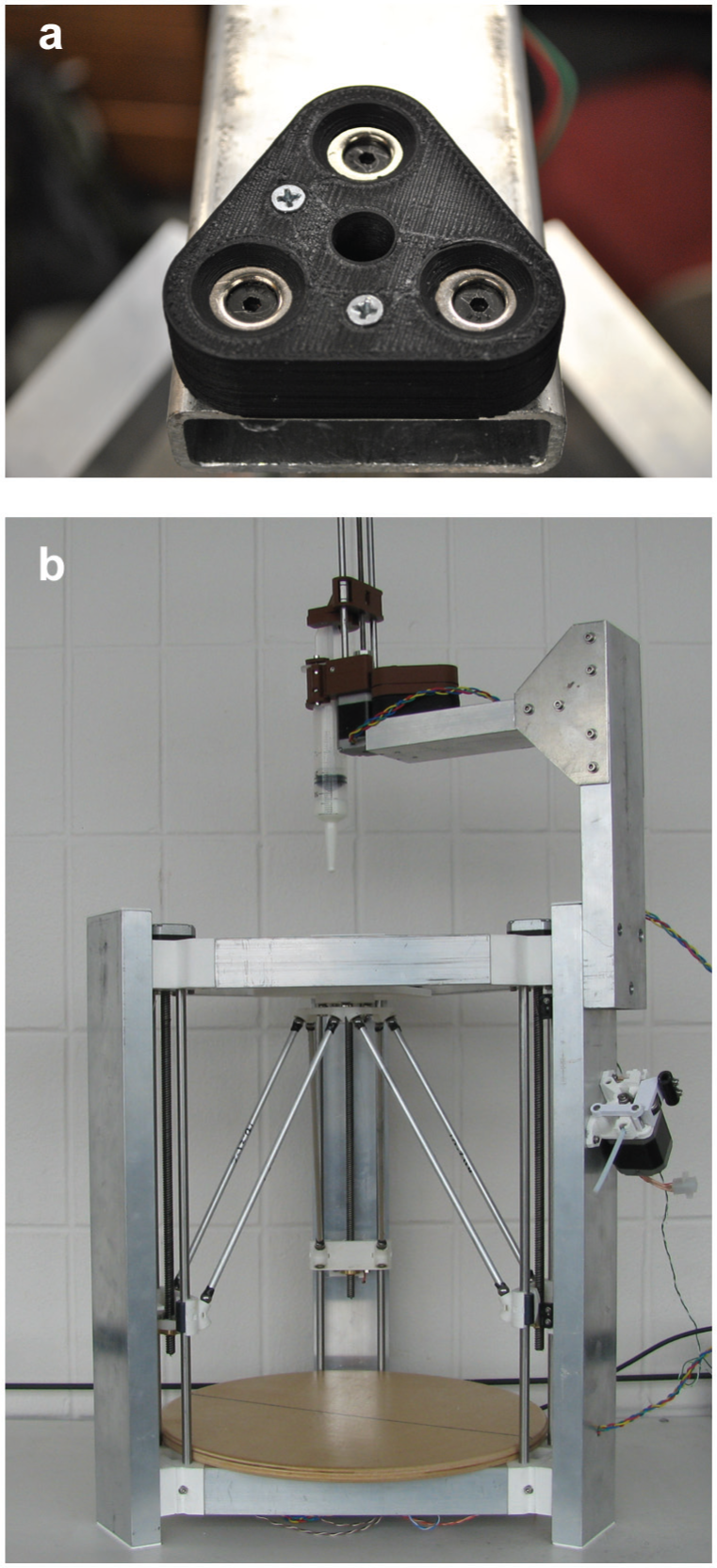
The OS 3-D platform can be reconfigured to the stationary tool mode by removing the end effector, inverting the connecting tie rods in their carriages, and attaching a stage mount end effector. Then bulky or heavy tool heads can be mounted magnetically to the stationary mount using a 3-D printable design ( Fig. 4a ). An example of this is in Figure 4b , where a 3-D printable open-source syringe pump 27 is shown mounted. This configuration can be used for 3-D printing viscous fluids, such as biomaterials or silicones for custom gaskets or seals for robust, inexpensive, and highly configurable reactionware for organic and inorganic synthesis, purification, and analysis28,29 and microfluidic lab-on-a-chip operation. 30
(
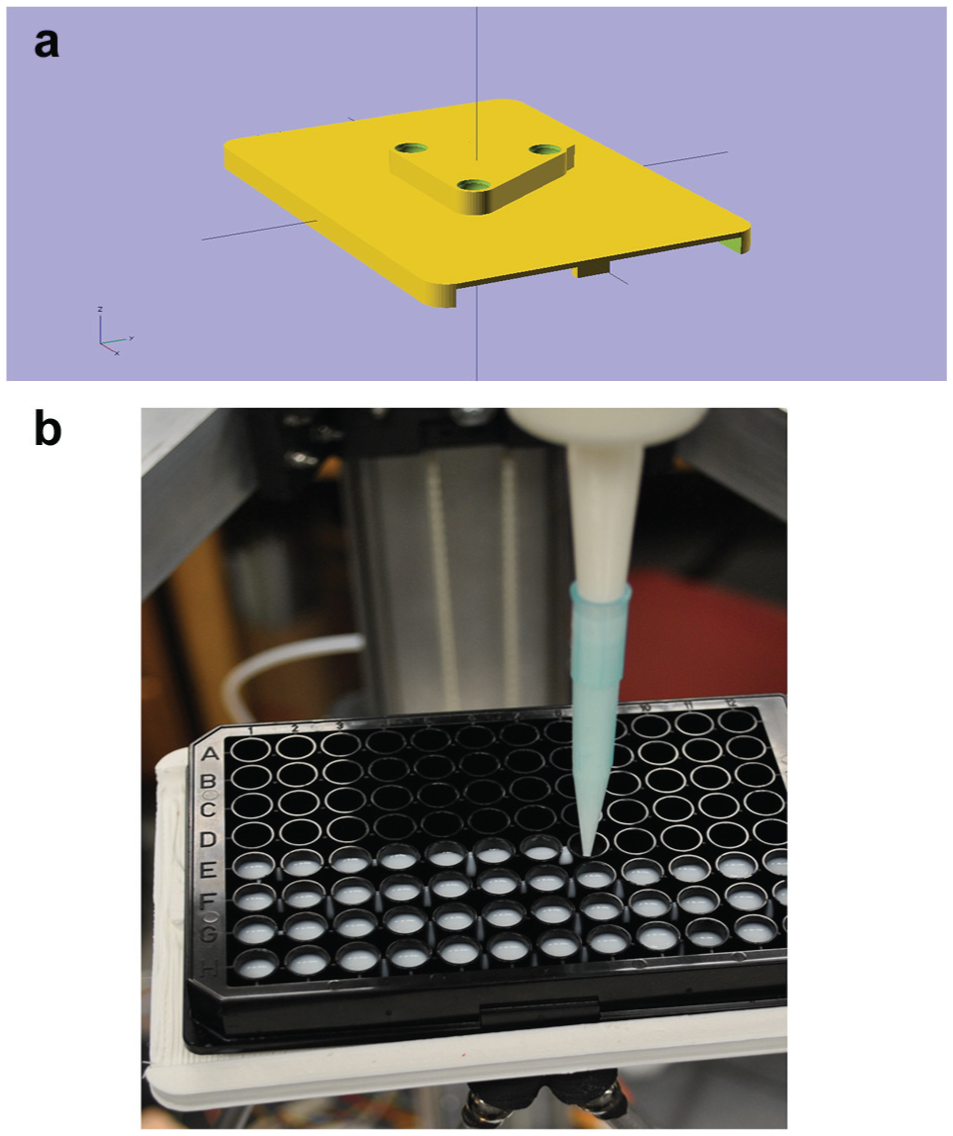
The OS 3-D platform can be configured for even more complicated scientific applications. By, for example, printing a 96-well plate holder ( Fig. 5a ) and using the syringe pump shown in Figure 4b , an automated fluid handling system can be assembled as shown in Fig. 5b . Automatic pipettes like this fluid handling system are used in chemical and biological research to accurately transfer a small volume of liquid in order to automate a large number of experiments. Similarly, the OS 3-D platform could be configured to do an automated assay (i.e., with a design of an illuminated microtiter plate holder and a colorimeter tool for the stationary mount).
(
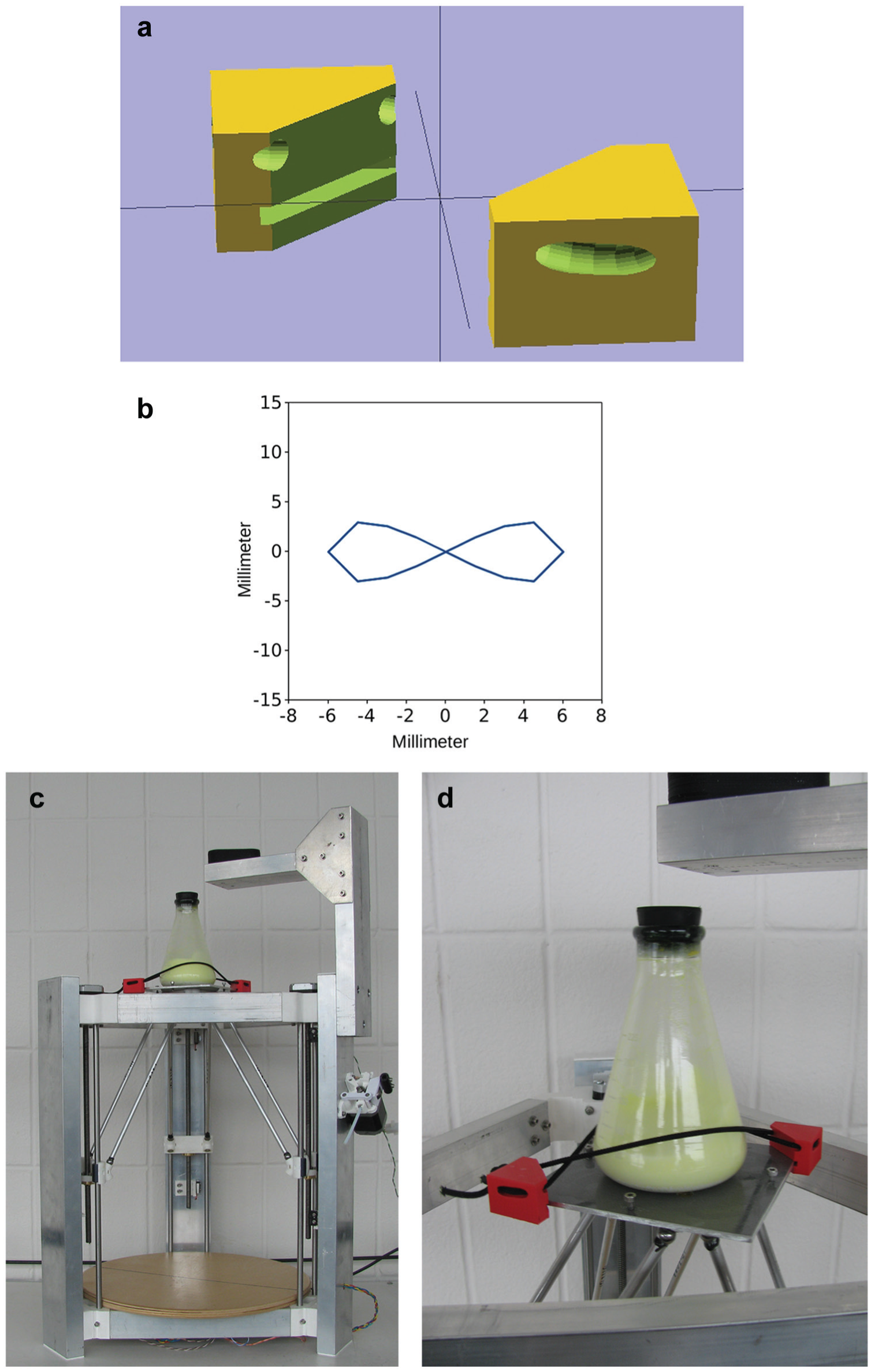
OS 3-D platforms can also be transformed into laboratory shakers, which are widely used in chemical, biological, and medical laboratories for solution mixing, specimen suspension, and chemical reactions. The 3-D printable parts needed to make a plate with a shock cord holder are shown in Figure 6a , which is used to hold an Erlenmeyer flask or other vessel. The path used for shaking is completely customizable (e.g., the end user can add additional types of motion, modify timing, or adjust the speed control) and can take on complicated paths, such as the lemniscate shown in Figure 6b . The assembly for shaking is shown in Figure 6c and a detailed close-up image is shown in Figure 6d . The OS 3-D platform configured as a shaker offers high-quality shaking tasks from basic vibration and x-y planar motion to high-level, user-defined, sophisticated shaking tasks (e.g., multistep or discontinuous shaking can be easily designed and performed). This is unlike most commercial shakers, which are sold with a fixed set of functions and are not able to be changed to meet new end users’ demands.
(
Discussion
Utilizing a RepRap 3-D printer in the lab makes it easier for researchers to design and build laboratory tools faster and more closely aligned to specific research needs. For example, a highly configurable reaction vessel made with a 3-D printer can integrate reagents, catalysts, and a purification apparatus into a single reactionware, 26 greatly simplifying multistep reactions, which commonly involve more than one piece of equipment to achieve. Although a traditional RepRap is extremely versatile with the ability to make literally millions of useful objects, it is limited to a single function: fabrication via 3-D printing. Extending the limited functionality of a RepRap 3-D printer into the OS 3-D platform for science described here significantly enhances the utility of the 3-D motion control system, while retaining the ability to provide additive manufacturing with fused filament fabrication (FFF).
Overall the 3-D scientific platform performs well when compared to single scientific function proprietary counterparts, although there are several deficiencies and limitations to this platform approach. The main deficiency of the platform applications compared to its commercial equivalent is the product quality for the highest-end (e.g., accuracy) applications, although the individual subcomponents have already been shown to perform admirably. For example, the open-source syringe pump has an accuracy of 1% and the commercialized auto fluid handler has an accuracy that is approximately equivalent, as demonstrated previously. 27 This limitation could be overcome in the future by, for example, following the Opentrons.com method of using a commercial hand micropipette mounted in a linear actuator to transfer fluids, which improves accuracy up to the specification of the micropipette used. It should be pointed out that there have already been efforts in the open hardware community to develop 3-D printable micropipettes 6 that could be used after validation is complete. Fluid handling can occur similarly to how it does in other automated systems for washing and mixing. Future work is needed to develop a 3-D printable tool to augment the platform and enable tip removal and washing.
Although some of the tools are not as precise as their commercial versions, in experimental configuration and functional setups they offer improved flexibility that enables key features to be matched. For example, the OS 3-D platform has better positional precision than most commercial fused filament fabrication-based 3-D printers, but some based on other 3-D printing technologies are capable of higher resolution than those demonstrated here. The OS 3-D platform could be adapted in the future to use other 3-D printing techniques (e.g., stereolithography) to improve resolution if it is needed, which would open up additional applications, such as lithography or printing microfluidic devices. This flexibility provided by the platform can also allow labs to collect similar functionalities in one tool. For example, with the open-source fluid handler, choice of syringe size will affect repeatability (precision) and total volume delivered. The pitch of the selected lead screw and the steps per revolution of the stepper motor will also impact the precision. These design variables can easily be changed in the parametric design. Assuming the remaining low-cost, widely available parts are on hand, the customized syringe pump can be printed and assembled in less time than it takes to shop for, order, and receive a similar commercial product and at a small fraction of the price. Industry laboratory suppliers divide functionalities to several subcategories to best fit their product line; however, in practice researchers pay extra money for multiple versions to cover a range of applications and may not be able to purchase exactly what they need for an experiment. Using the OS 3-D platform model provides laboratory personnel the ability to make only what is needed to meet functionality requirements rather than purchasing entire new units or paying for features they will not use.
This added in-house improvement of the platform also comes with a drawback. Although some of the specifications of the platform have been validated, for new functionalities the quality will need to be vetted and validated by the user or another enterprise. For many labs this is not a major impediment, but for some labs this could be a limiting factor to immediate novel uses. This is the primary limitation of the system: the threshold for entry-level users to start developing new functionalities. The OS 3-D scientific platform’s operation and routine maintenance is straightforward, with existing application programming interfaces (APIs) developed along with the current applications; however, modification of the functionality requires some skills not present in all laboratories (e.g., electronic, CAD, and programming knowledge). Future work is needed to improve the user-friendliness and ease of use of the software and develop scripts for all basic tasks. However, it should be pointed out that most labs are relatively sophisticated and already make, modify, repurpose, and fix existing equipment of substantial complexity. For such labs, the OS 3-D platform makes it easier to improvise and invent new ways to do research, similar to the benefits observed for the OS Arduino electronics prototyping platform. These labs can share their improvements to gain useful feedback and technical evolution from the wider community, similar to the benefits observed in other open-source projects. For less instrumentally sophisticated labs, although this is a current impediment to widespread adoption, it provides an opportunity for open-hardware enterprises to provide turnkey solutions for labs that need them.
All of the software, firmware, hardware designs, and complete bill of materials employed here to make the OS 3-D platform and all of the demonstrated mounts are open-source and freely available. 31 This “freedom” falls under the open-source definition, such that everyone is free to use any part of the platform in any way they choose. This includes commercialization of the OS 3-D platform or any of its tools. However, the OS license has a share-alike requirement such that those that distribute components (with or without improvements) will grant all the same rights that they received to their users. This has the effect that improvements are shared with the global community so that the OS 3-D platform will continue to evolve technically in both scope and quality.
All of the parts required to build the platform and tools are readily available on the Internet or from a local hardware store. The platform is surprisingly easy to assemble; someone unaccustomed to such building can assemble the platform in under 24 h, similar to the build time of a standard MOST Delta RepRap. Each of the tools also require assembly of varying difficulty; the syringe pump, the most complex, takes less than 1 h to assemble. 24 The materials and supplies for the entire platform and all tools (excluding the pH probe, beaker, and flask) cost less than $500.00, as can be seen in Table 1 .
Costs of Subcomponents of the OS 3-D Scientific Platform.
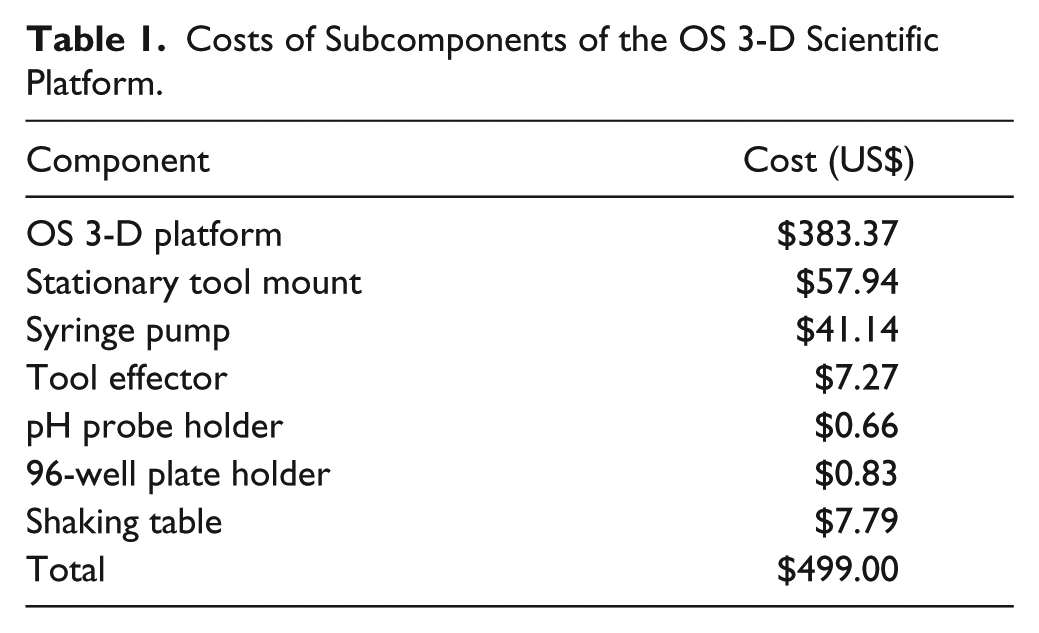
The US$500 price for the OS 3-D scientific platform stands in stark contrast to the capital costs of single-purpose commercially available scientific tools with functionality equivalent to that of only one of the functions of the platform. Each of the individual capabilities performed by proprietary hardware costs more than the entire OS 3-D platform (including all tool heads) because 3-D printers and lab shakers are in the US$1000–6000 range, auto-stirrers cost more than US$1000, and automated fluid handlers can cost a few thousand to tens of thousands. In the scientific hardware model demonstrated here, instruments are now bundled and platform based, which means each individual application is a built-in feature of the system and shares the OS 3-D platform; hence, they no longer need be assembled as a stand-alone unit. In this case, the cost of the add-ons for scientific applications and the OS 3-D platform itself is conservatively less than 10% of the corresponding proprietary commercial products that they replace.
For laboratories with limited budgets, particularly those in the developing world that are chronically underfunded, this can provide access to equipment and functionalities that would not otherwise be possible. The ability of open hardware and 3-D printing to reduce research costs has been noted before by many authors. These open-source projects benefited from the open-source community where every participant can contribute, use externally generated improvements, and be inspired by others. The advantages of developing software with an open-source method are well established, with now a large and mature community supporting its long-term development.32–34 The community for open-source hardware is relatively less mature, but growing rapidly. 6 The open-source ecosystem thrives on constant innovation as add-on features, more designs, and improvements come from end users and designers. One system can combine features to produce more advanced applications (as shown here with fluid handling), or it can borrow the idea from another system to evolve. For instance, the auto liquid handler, along with the laboratory shaker, can make an auto titration system, where after each drop from the fluid handler the shaker vibrates for a couple seconds for uniform mix. And a pH meter holder arm can be employed from other systems to help with titration termination. Clearly, the 3-D platform built on a RepRap method and structure provides a host of opportunities to develop high-quality, but low-cost scientific equipment in the future.
Researchers are familiar with the high costs of scientific equipment, and this article has clearly demonstrated cost-saving opportunities using the OS 3-D platform for scientific research. However, the primary purpose of this article is not to make a direct economic comparison of the OS 3-D platform with proprietary commercial offerings. Instead, this article provides the potential for vastly reducing the cost of performing automated and/or repetitive tasks that require precise positioning or motion control in a wide array of scientific laboratory environments. It should be clear that the functions introduced here are far from the entire scientific scope of the OS 3-D platform, as its purpose is to open and adopt the concept of an open and flexible 3-D hardware ecosystem to science labs. The flexibility of the OS 3-D platform is the source of its value. As the bulk of the components are designed to be 3-D printable by the OS 3-D platform itself, capabilities can be tailored to the needs of the individual laboratory. These improvements can then be distributed digitally and manufactured anywhere in the world with the platform itself.
In addition, researchers are familiar with the restrictions imposed by proprietary equipment vendors (e.g., inability to maintain without prodigious annual service contracts or canceled warranties for trivial customer fixes), and several have commented before about the restrictions created by the patent system on scientific progress.35,36 The Biological Innovation for Open Society argues that research tools should be freely available, such as the Linux operating system, 35 and policies have been proposed to increase the return on investment of scientific funding using open-source hardware. 25 The 3-D scientific platform is an example of such an open-source hardware ecosystem in which all scientists are free to use, modify, and share according to their own needs, without any restrictions or concerns about licensing or intellectual property. As pointed out by Hansen and Howard, lack of collaborative platforms is the major challenge of open-source hardware development; 2 therefore, the goal of creating such ecosystems is to provide a foundation for others to incorporate their own designs and capabilities into the platform. Unlike commercial products, the open-source hardware does not rely on a hierarchical distribution process; hence, its participants become the key elements in development and distribution, whether individual labs or companies.
Moreover, the ability to highly customize a research instrument such as the OS 3-D platform provided here also saves research time. Researchers can design or download others’ designs and implement them rapidly with no delay for shipping and the long lead times associated with conventional custom equipment. The value of timely accessible equipment is key to advanced, time-dependent research tasks.
This open-source hardware platform may also encourage interdisciplinary collaboration. The open-source community has the full potential to explore a vast pool of ideas and inspires cross-discipline innovation. 37 As researchers from different disciplines share and cooperate asynchronously with one another to develop additional platform capabilities, the entire scientific community can benefit from this massive manpower and collective wisdom. This method of enabling researchers from far corners of academia to receive intellectual and physical support can improve their ability to solve problems.6,38
Conclusions
This article introduced an open-source 3-D platform as a low-cost instrumental ecosystem for scientific applications. Besides a 3-D printer, five individual applications were developed and demonstrated, covering daily laboratory tasks of measurement, shaking, fluid transferring, and fabrication. The results show that the open-source ecosystem reduced the costs compared to commercial equipment by at least 90%, and the open-source nature makes it readily available for everyone to use, modify, share, and distribute for their own purposes. Utilizing the open-source design paradigm leads to a highly customized and highly flexible 3-D platform that combines different features to produce new types of application or exchange designs with other ecosystems. It is clear that the emergence of the open-source instrumental ecosystem will lead to less expensive, easier, faster research equipment development and enable a much broader group of participants to provide valuable contributions to the scientific community.
Footnotes
Acknowledgements
The authors would like to acknowledge technical support and helpful comments from G. C. Anzalone, M. Frost, and T. Porter and 3D4Edu for equipment.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.