
Abstract
Low-efficiency diffusion mechanism poses a significant barrier to the enhancement of micromixing efficiency in microfluidics. Actuating artificial cilia to increase the contact area of two flow streams during micromixing provides a promising alternative to enhance the mixing performance. Real-time adjustment of beating behavior in artificial cilia is necessary to accommodate various biological/chemical reagents with different hydrodynamic properties that are processed in a single microfluidic platform during micromixing. Equipping the microfluidic device with a self-troubleshooting feature for the end user, such as a bubble removal function during the process of multiple chemical solution injections, is also essential for robust micromixing. To meet these requirements, we initiated a new beating control concept by controlling the beating behavior of the artificial cilia through remote and simultaneous actuation of human fingertip drawing. A series of micromixing test cases under extreme flow conditions (Re < 10–3) was conducted in the designed micromixer with high mixing performance. Satisfactory micromixing efficiency was achieved even with a rapid beating trajectory of the artificial cilia actuated through the fingertip motion of end users. The analytical paradigm and results allow end users to troubleshoot technical difficulties encountered during micromixing operations.
Introduction
Rapid and high-performance micromixing determines the efficacy of the newly designed microfluidic platform. 1 Actuating a series of artificial cilia as the primary flow manipulator to convert volumes of fluids into increasingly thinning sheets of lamella provides a promising alternative for accelerating the micromixing process.2,3 This finding, which supports the concept, has been demonstrated successfully in the literature. For example, artificial cilia have been electrically actuated to induce substantial fluid velocities of up to 0.6 mm/s for efficient micromixing. 4 Magnetic micro- and nano-rods with high aspect ratios were fabricated to simulate the beating nature of biological cilia for microfluidic applications. 5 The interaction between the motion of each artificial cilium and the surrounding flow field requires further illustration to attain optimal mixing performance. This process was established in recent studies, which identified and validated a new beating behavior of the artificial cilia through flow visualization by using a micro-particle image velocimetry technique.6,7
Providing end users with self-troubleshooting alternatives is an urgent requirement to extend the practical application of active micromixers through artificial cilia actuation. These options can extend the usage of a commercialized micromixer product and reduce errors primarily caused by micromixer malfunctions after performing multiple tasks. For example, the generation of air bubbles in a micromixing task is unavoidable during the injection switch in fluid mixing across multiple samples or chemical solutions. These air bubbles must be removed immediately to avoid reduced mixing efficiency. Unwanted gas pockets can also form accidentally because of priming or cavitation. 8 Therefore, a gas removal function must be integrated into the devices. An air bubble trapping example, in which a dynamic bubble trap method was performed to remove air microbubbles from the arterial blood, is available in literature. 9 A porous membrane was also incorporated into the microfluidic device to remove gas bubbles. 8 These methods require additional designs and materials to facilitate the gas bubble trapping process, which can increase the complexity of designing and operating the devices. An improved method to repel bubbles without modifying the original design of the microfluidic platform must be developed.
Enabling diverse artificial cilia beating behavior is also beneficial for sustaining high performance of the artificial cilia-based micromixer. For example, the absence of fluid in the microchannel prior to micromixing often causes the tips of two adjacent cilia to stick because of the magnetic momentum between them. If the adherent force between these two tips is too strong, flushing the fluid toward them or actuating artificial cilia through a normal beating behavior will not break these two tips apart. Thus, the micromixing efficiency will deteriorate. A fast back-and-forth vibrating beating behavior serves as a good solution in such cases. High-frequency back-and-forth motion (over 30 Hz) can also remove residues of insoluble solutes after flow mixing. Such activity cannot be achieved through the typically rotational beating behavior of artificial cilia during the mixing process because the artificial cilia are usually rotated at low frequency (<3 Hz) in the mixing task. Low-frequency rotation aims to obtain a large beating area for high-performance micromixing. Therefore, high frequency is unsuitable for mixing but is necessary for micromixer precleaning. Given this requirement, an alternative beating behavior that can be actuated on the basis of diverse flow conditions is required.
Providing remote technical support to end users to avoid possible breakdown of the artificial cilia-based micromixer during operation is recommended in addition to enabling consumers to actuate artificial cilia with arbitrary beating behaviors. This type of problem assessment requires actuating artificial cilia from a remote customer support center to resolve the problem. A new automated mixing concept should be developed through wireless actuation of artificial cilia after considering the demands that were mentioned. Several highly accurate beating behaviors of the artificial cilia should be performed remotely to broaden its practical applications for the public.
Fabrication of an Artificial Cilia-Based Micromixer
The T-shaped polydimethylsiloxane (PDMS; Dow Corning Corp., Midland, MI) microchannel embedded with magnetically actuated artificial cilia for micromixing was manufactured through a series of microfabrication steps, including microdrilling and microcasting. A series of 10 × 1 hole arrays, each of which have a diameter of 50 µm and a depth of 400 µm, was distributed along the centerline of the microchannel and carved on an acrylic substrate. A microcasting procedure was conducted, and a corresponding PDMS microchannel replica was fabricated. A mixture of PDMS and magnetic particles (5 µm in diameter, MQP-15-7; Magnequench, Singapore) was poured onto the acrylic substrate and filled in the deep holes during the microcasting step. A hot baking step was performed afterward to solidify the PDMS with the particle mixture. The corresponding PDMS replica was detached from the acrylic mold and enclosed by a coverslip through oxygen plasma bombardment. Details of this fabrication process flow were described previously. 6 The fabricated micromixer had a width of 175 µm and a depth of 500 µm. Figure 1 shows a scanning electron micrography (SEM) image of the fabricated artificial cilia.
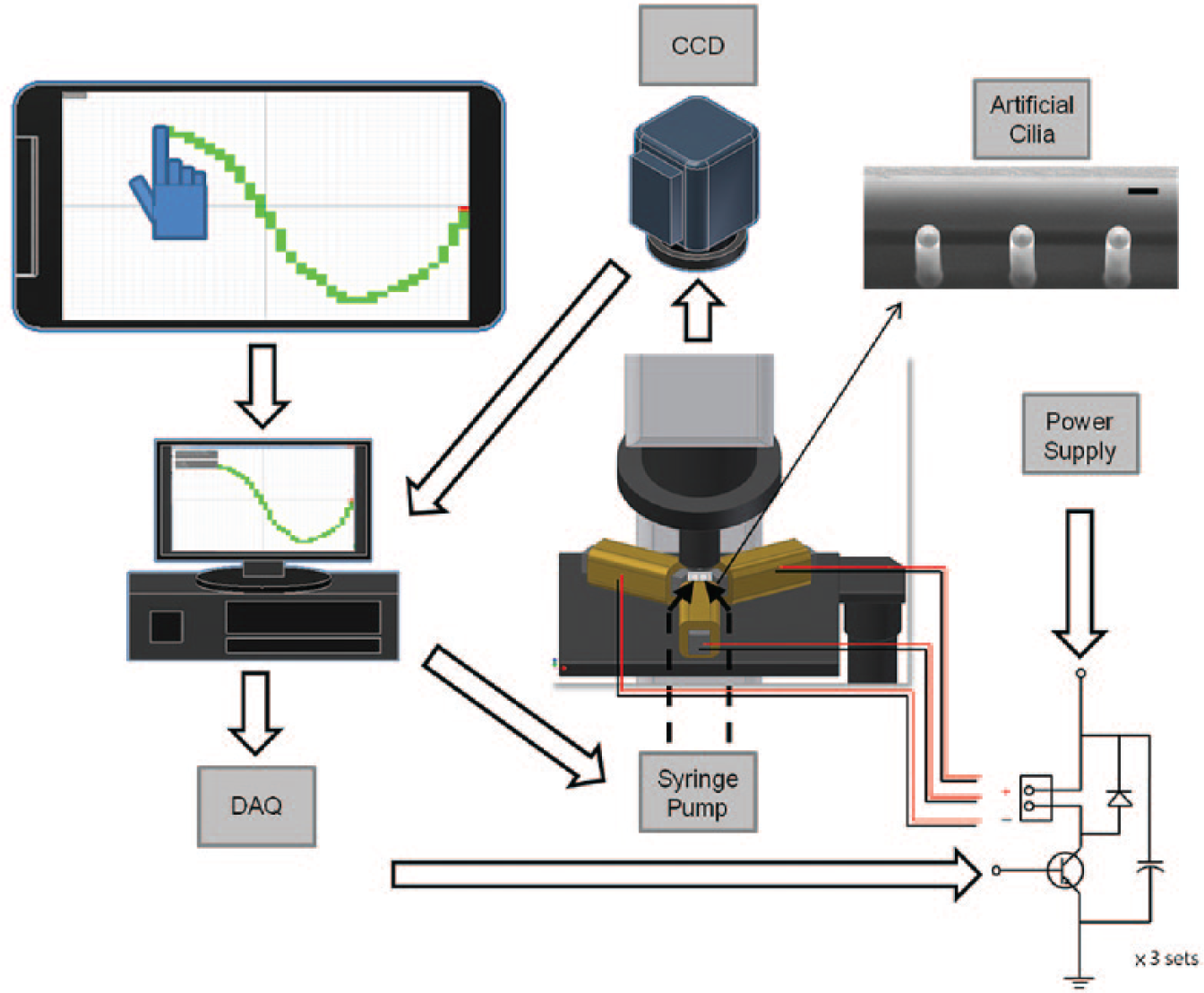
Schematic illustation of the remote control system for artificial cilia actuation via smartphone for micromixing applications. Scale bar: 50 µm. DAQ, data acquisition.
Actuation System
A magnetic coil system that consisted of three rolls of magnetic coils, an in-house driving circuit, and a power supply (GPR-3510HD; DC Power Supply, Instek, Taiwan) was assembled to generate a homogeneous magnetic field with high controllability for artificial cilia actuation during the micromixing task. The system was controlled by using an implemented in-house script through a data acquisition device (NI cDAQ-9174; National Instruments, Austin, TX) with modules embedded for signal input and output (NI 9201 and 9264). To control the time duration of the electrical current supplied to the coils for magnetic field generation, a pulse-width modulation (PWM) waveform was generated through the superimposition of a sine wave and a sawtooth wave. The PWM switching frequency was set at 240 Hz to reduce the effect of hysteresis. A schematic of the designed magnetic actuation system is illustrated in Figure 1 . An iron rectangular bar (1.1 × 1.1 × 7.5 cm) was wrapped with a single-strand 24-gauge magnetic coil for 800 turns for each magnetic coil set. An electric current of 4 A was applied on the coils from the power supply at 20 V, and the generated magnetic field for each coil set was estimated at 0.3 T. A built-in figure-of-eight motion was performed for each artificial cilium as a control test. This beating behavior was obtained by sequentially imposing a sinusoidal wave on each coil. The rotational frequency was set at 1 Hz for the coils. The time-dependent moving trajectories of an artificial cilium tip along the x-y plane were recorded and quantified to provide details of the artificial cilia beating behavior during the magnetic actuation. The tip trajectories were recorded by using a CCD camera at a speed of 30 fps and quantified with a kinematic software called DLT dataviewer2 10 to provide kinematic information on artificial cilia in motion.
Remote Actuation
The presented artificial cilia-based micromixer was remotely controlled by using trajectory recognition with an application installed on a cell phone and through the wireless communication between the cell phone and the actuation system, as illustrated in Figure 2a . The trajectories through the fingertip drawing displayed on the cell phone screen were initially identified and discretized into a series of point data with space-calculated locations. This information was collected through the application installed on the cell phone and then transferred to the actuation system via a wireless connection. The wireless connection was obtained by using a standard Transmission Control Protocol (TCP). The communication algorithm is described as follows (also shown in Figure 2b ): a request from the user is initially sent to the server. The server begins sending information on the coordinates used to identify the trajectory location in space to the client once the server agrees to accept the request. The trajectory is then transmitted from the client to the server, which establishes the communication. A red symbol on the screen was designed to define the start and end points of the drawing path. Once the path is determined, all artificial cilia will repeat this path until the next path is initiated.
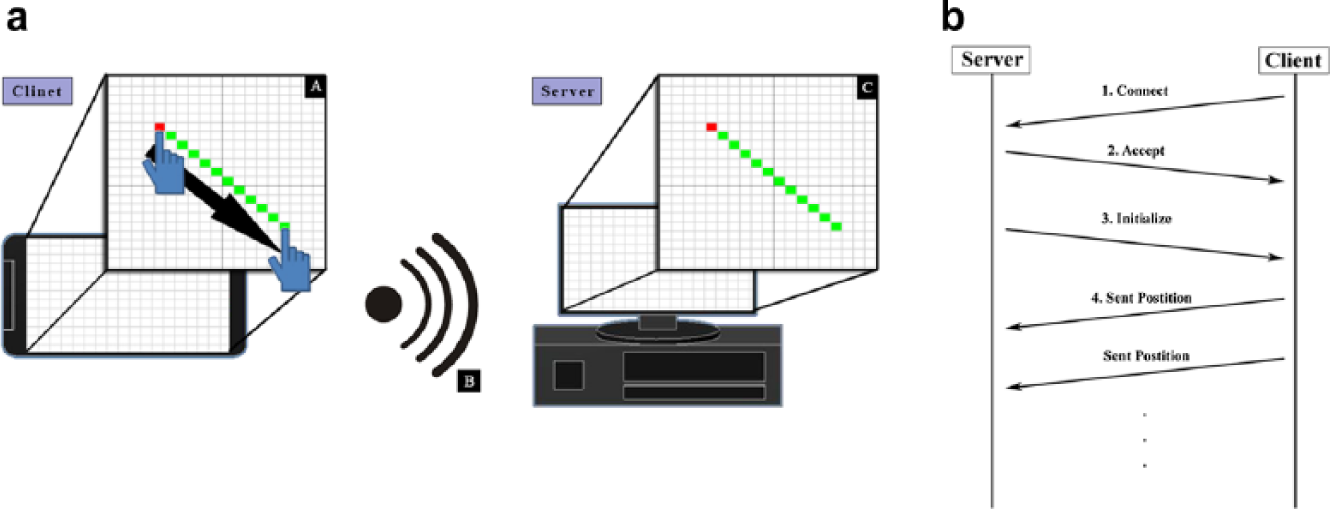
Remote control of the artificial cilia-based micromixer through trajectory recognition (
Micromixing
A series of micromixing test cases was conducted, and the associated mixing performance was quantified and compared to verify if the micromixing performance through the remote actuation of fingertip drawing can be as effective as the built-in actuation method. These test cases were processed by injecting two solutions—namely, aqueous glycerol and aqueous glycerol dye solutions (red). Each solution was 75% in weight and was injected into the microchannel via a pressure-driven force by using a calibrated syringe pump (KD Scientific, Inc., Holliston, MA). Three representative flow rates (0.54, 0.66, and 0.80 µL/min) were selected to study the effect of flow rate on mixing performance. The Reynolds number (Re) was calculated as 1.37 × 10–3 when the flow rate was set at 0.66 µL/min. The mixing performance of the micromixer was calculated by using equation (1) by quantifying the intensity differences of the recorded flow mixture images 11 in the downstream. The measured plane was aligned to the tip plane of the artificial cilia (400 µm above the bottom wall). The intensity deviation was selected as a mixing performance checkpoint to provide quantitative mixing performance results. Mixing performance of 1 denotes complete mixing, whereas the value of 0 refers to the absence of mixing.

where mi is an intensity value of each pixel in the selected region of interest on the imaged plane, and m– is the arithmetic average of mi.
Results and Discussion
This article aims to remotely control various beating behaviors of artificial cilia through fingertip drawing for different micromixing applications and troubleshooting. The resultant mixing performance is targeted to be similarly efficient as the built-in beating behavior in controlling the motions of the artificial cilia. To prove this concept, two flow streams (dyed and undyed) in the micromixing test case were run through the fabricated artificial cilia-based micromixer, and the beating behavior of each artificial cilium was actuated by following the figure-of-eight trajectory. This trajectory was generated by using four different methods: built-in, fingertip drawing 1, fingertip drawing 2, and fingertip drawing 3. The differences of the trajectories generated by the built-in and the fingertip drawing 1 to 3 methods are shown in Figure 3 . The variations were primarily attributed to the fact that an end user was unable to sketch a perfect figure-of-eight trajectory similar to that generated by the built-in method using fingertip drawing. Therefore, test case results can be used to verify if the fingertip drawing method is as effective as the built-in method from the micromixing perspective, even when the trajectory deviated from the built-in one. Figure 3a shows a comparison of the tip trajectory generated by the built-in method and the fingertip drawing 1 to 3 methods; the corresponding mixing performance was calculated and plotted in Figure 3b . Results demonstrated that mixing performance reached approximately over 0.8 within 8 s of the artificial cilia actuation by using these four methods. The mixing performance of over 0.8 was considered successful because the flow condition imposed in this task was highly viscous (Re is on the order of 10–3). A representative of over 0.8 mixing performance result is also shown in Figure 3b . This result demonstrates that the proposed remote control concept is practically useful given that the mixing performance through the fingertip drawing method is comparable to that of the built-in method. An end user can operate this micromixer with his or her own fingertip motions to obtain efficient micromixing results.
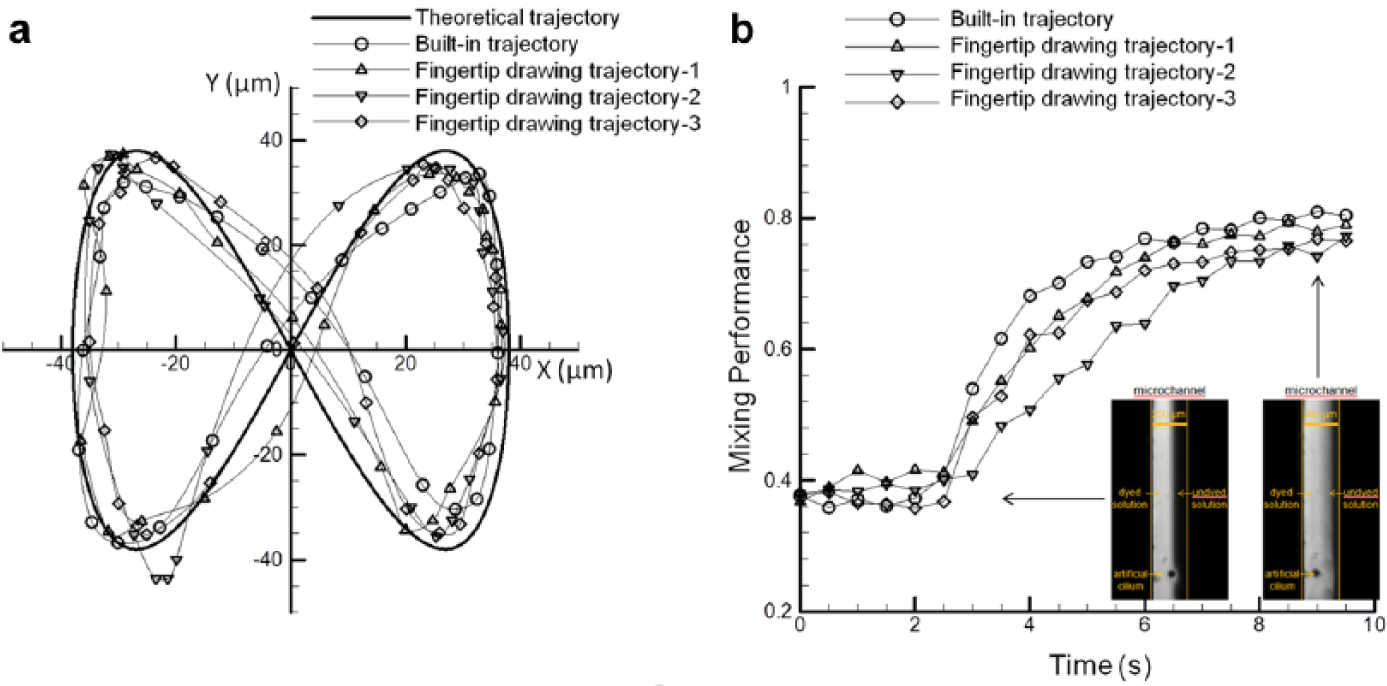
Trajectory comparsion using the built-in and fingertip drawing methods (
Apart from testing this micromixer with the aforementioned flow conditions, information on its associated performance under harsh conditions was also reported and described. Prospective customers can therefore acquire increased knowledge on how and when to operate this product from the analysis presented in this study. Motivated by this objective, we applied various incoming flow rates with the delineated mixing performance results. The effect of tested solutions’ viscosity on the mixing performance was also analyzed. We initially selected and applied flow rates for the micromixer. Figure 4 shows the calculated mixing performance. The mixing performance at the starting point (time = zero) with different flow rates varied in all test cases, but each mixing curve and the final mixing results were consistent across the test cases. An examination of the effect of flow viscosity on mixing performance found that variations in viscosity significantly altered the mixing performance results, as shown in Figure 5 . Solutions with low viscosity (50% of glycerol) were mixed immediately after the two solutions came into contact. Thus, mixing performance was initially over 0.8 even without artificial cilia actuation and remained stable relative to time. By contrast, mixing performance was significantly low (approximately 0.2) in a high-viscosity solution (90% of glycerol) at the beginning of the mixing process and surged significantly over time (mixing performance reached 0.8 after 8 s). This result was attributed to the mixing condition that was hindered by the extremely low diffusion coefficients of these two flow streams. The artificial cilia actuation helped resolve this issue by increasing the contact area between them. The analytical results indicate that the presented micromixer is advantageous in dealing with a highly viscous flow mixing case. However, a mixing trend with a relatively low mixing performance is observed in Figure 5 , in which mixing was conducted at a highly viscous flow condition (90% of glycerol) by using the fingertip drawing method. This result can be attributed to the observation that in a highly viscous flow condition, small deviations of the trajectories (between built-in and fingertip sketching) can lead to significant variations of the induced flow, which significantly affect the mixing performance.
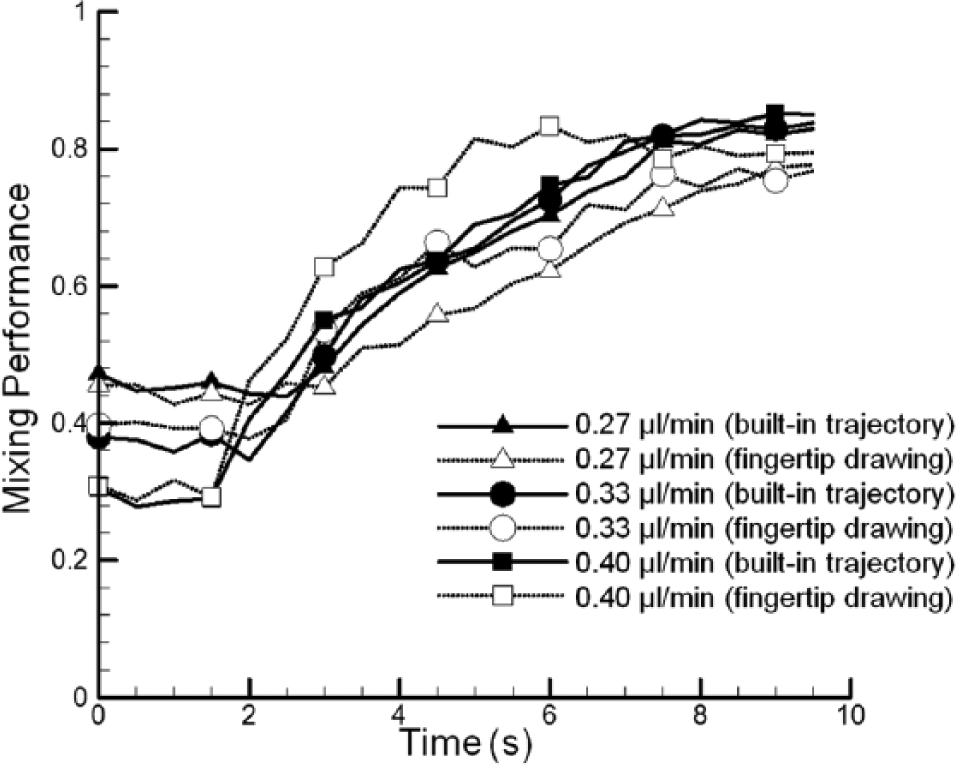
The effect of flow rate on the mixing performance with trajectories generated through the built-in and fingertip drawing methods. Note that the presented flow rate is a half of the total flow rate for each test case.
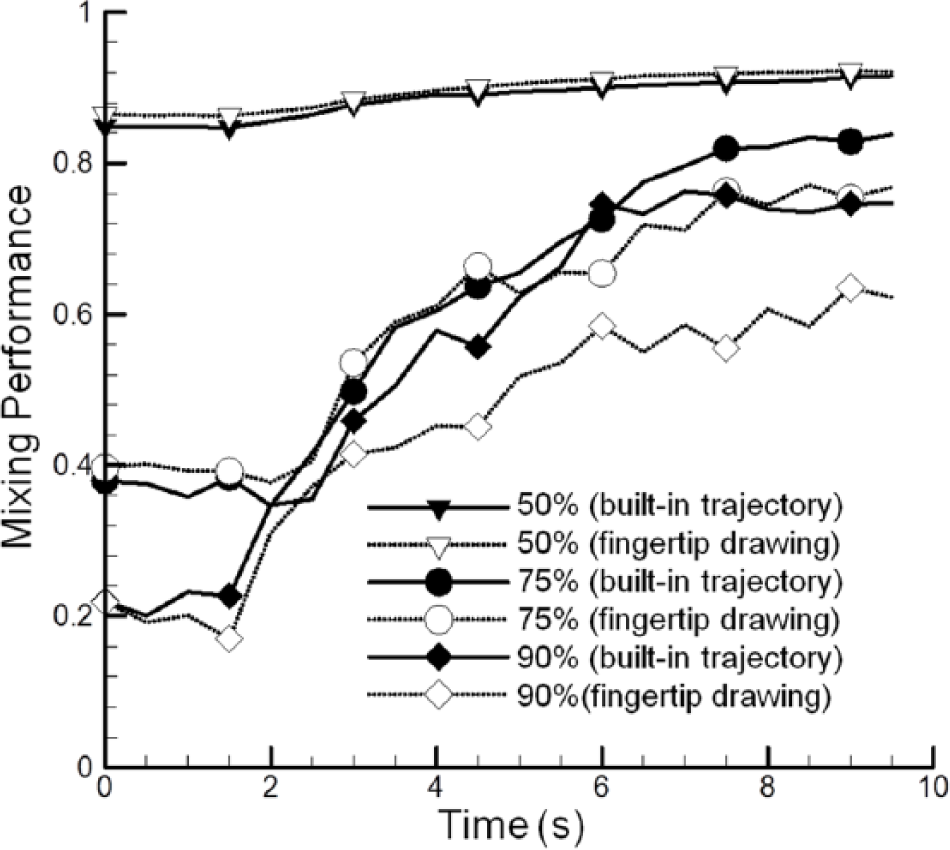
The effect of fluid viscosity on the mixing performance with trajectories generated through the built-in and fingertip drawing methods. 50%, 75%, and 90% refer to a viscosity of 5.10 cP, 28.4 cP, and 164 cP, respectively.
In conclusion, a new concept to expand the practical use of the artificial cilia-based micromixer was proposed and demonstrated in this article. The remote control method demonstrated effective mixing performance similar to that of the built-in method. Various imposing flow conditions, including diverse viscosity values of the test solutions and varied flow rates, were also examined, and satisfactory mixing performance was attained. This study suggests that the presented method is beneficial for end users to perform on-site troubleshooting and enables immediate problem assessment from the support center during micromixer operation. The significant engineering progress accomplished in this research can further accelerate the development of a fully automatic microfluidic device.
Footnotes
Acknowledgements
This work would not be possible without the facility provided by National Cheng Kung University, Taiwan.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The study was supported through National Science Council of Taiwan under Contract No. NSC 102-2221-E-011-037-MY3 (to Chia-Yuan Chen).