
Abstract
Objectives
The purpose of this study was to investigate technique differences between expert and novice manual wheelchair users during over-ground wheelchair propulsion.
Method
Seven experts (spinal cord injury level between T5 and L1) and six novices (non-wheelchair users) pushed a manual wheelchair over level ground, a 2.5% cross slope and up a 6.5% incline (7.2 m length) and 12% incline (1.5 m length). Push rim kinetics, trunk and shoulder kinematics and muscle activity level were measured.
Results
During the level and cross slope tasks, the experts completed the tasks with fewer pushes by applying a similar push rim moment over a greater push arc, demonstrating lower muscle activity. During the incline tasks, the experts required fewer pushes and maintained a greater average velocity, generating greater power by applying a similar push rim moment over a greater push arc with greater angular velocity, demonstrating greater trunk flexion and higher shoulder muscle activity.
Conclusions
This study identifies experience-related differences during over-ground manual wheelchair propulsion. These differences are particularly evident during incline propulsion, with the experts generating significantly greater power to maintain a higher velocity.
Introduction
Sustained manual wheelchair propulsion can lead to shoulder injury, with rotator cuff degeneration most commonly reported. 1 Rotator cuff injuries are associated with increasing age and time as a manual wheelchair user, 2 and can lead to secondary degenerative complications. 3 Published guidelines suggest manual wheelchair users should aim to minimise repetition and peak forces experienced during tasks to reduce upper limb injury risk.4,5
Previous research has examined differences in propulsion technique between novice and expert wheelchair users. Rodgers et al. examined experts and novices propelling on a wheelchair ergometer when both fresh and fatigued. 6 The experts applied a lower hand rim moment to maintain the required velocity, with a significantly higher push rate and lower contact time. Another study examined biomechanical differences between novices and experts during propulsion at different speeds on a dynamometer. 7 The expert users maintained a greater average velocity than the novices, generating greater power without an increase in application of torque, achieved in part by application of force over a greater push arc. A further study examined muscle activity levels of experts and novices, demonstrating higher muscle activity levels in the expert paraplegic users, who chose to propel at a higher velocity than the novices. 8
These ergometer-based studies demonstrate that the expert users are able to propel more effectively than novices, either by applying torque to the push rim over a greater push arc at a greater angular velocity or at a higher push rate, but that higher muscle activity levels may be required to achieve this. Further investigation is required to examine whether such differences in propulsion technique are evident during over-ground propulsion, particularly when tasks become more challenging. In particular, it would be useful to examine whether expert users are able to maintain the suggested optimal technique to complete more challenging propulsion tasks at a greater velocity with fewer pushes, and what impact this has on muscle activity level.
Aims
The aim of this study was to compare manual wheelchair propulsion technique between experts and novices during a variety of over-ground tasks, by examining push rim kinetics, trunk and upper limb kinematics and also shoulder muscle activity level. It was hypothesised that the expert users would be able to achieve each task with fewer pushes and maintain a higher average velocity.
Methods
Participants
Participant characteristics.

Experimental protocol
The participants attended UCL’s Pedestrian Accessibility and Movement Environment Laboratory (PAMELA) for a single visit. Participants transferred into the test wheelchair, the Vanos Excel G6 High Active ‘Sport Edition’. The chair was adjusted to ensure an elbow joint flexion angle of 100–130° when the hand was placed at the top dead centre of the push rim. The participants performed four pushing tasks: level surface (8.4 m), 2.5% cross slope (7.2 m, instrumented side on the down slope), 6.5% incline (7.2 m) and 12% incline (1.5 m ramp). During each of the tasks, push rim kinetics, trunk and upper limb kinematics and surface electromyography (EMG) were recorded.
Push rim kinetics
Push rim kinetics were recorded using the Sensewheel Mark 1 (Movement Metrics, London, UK), a low-cost and lightweight instrumented wheelchair wheel measuring three-dimensional forces applied to the push rim, torque about the wheel axle and angular velocity of the wheel. The Sensewheel was positioned on the left side of the wheelchair; data were sampled at 50 Hz and analysed using Matlabr2012b (Mathworks Inc, MA, USA).
The push phase of the propulsion cycle was defined by measurement of the application of a positive moment about the wheel axle. The number of pushes to complete the task was calculated from detection of the first push phase, until detection of the braking phase. Mean velocity and push rate were calculated for the same time period. Power was calculated using measurement of the moment applied to the wheel (tangential force × wheel radius) and angular velocity of the wheel, and mean peak and the mean value for the whole task were calculated.
9

The mean work per cycle was calculated using the mean power and push rate.

The mean moment value was calculated from the whole task. Mean angular velocity, percentage push phase and push arc were calculated as an average of each push phase from the whole task.
Trunk and upper limb kinematics
Trunk and left thoraco-humeral kinematics were measured using the XSens MTw inertial measurement system (XSens Technologies, NL). XSens units were attached to the thorax and humerus. The participant was positioned in a ‘neutral’ position of thoraco-humeral angle, to align the sensors with the ‘anatomical’ coordinate system. Data were sampled at 50 Hz, and the rotation matrix for each unit exported to Matlab for post processing. Matrix multiplication to calculate the relative position of the XSens unit on the thorax with respect to the neutral start position (trunk kinematics) and the XSens unit on the humerus with respect to the XSens unit on the thorax (thoraco-humeral kinematics) was completed, 10 and then the Euler angles from the rotation matrix were calculated. For each push of each task, maximum, minimum and change in trunk flexion and thoraco-humeral extension, abduction and internal rotation were calculated. Average values of each measurement were calculated for statistical analysis.
Surface EMG
Surface EMG was recorded from the anterior deltoid (AD), pectoralis major (PM) and infraspinatus (IS) muscles using the Delsys Trigno™ Wireless System (Delsys Inc, MA, USA). Each sensor contains four contacts, 99.9% silver, dimensions 5 × 1 mm, with two active contacts and two stabilising references. Skin surface EMG is amplified by 1000, with a signal bandwidth ranging from 20 to 450 Hz. Baseline noise is reported as <750 nV RMS, with a Common Mode Rejection Ratio of >80 db. Data were sampled at 2000 Hz.
Sensors were attached to the left upper limb, in accordance with the SENIAM guidelines for sensor placement. 11 Data were recorded from maximal voluntary isometric contractions (MVIC) for each of the muscles using the functional tests described, 12 and then during each of the pushing tasks.
The data were exported to Matlabr2012b (Mathworks Inc, MA, USA) for analysis. All data were full wave rectified, and low-pass filtered using a fourth-order Butterworth filter with a cut-off frequency of 5 Hz. The pushing tasks data for each muscle were normalised using the values obtained from the MVIC tests. The peak and mean values for each muscle were obtained for each push phase of each propulsion cycle for each of the tasks. A mean value for peak and mean muscle activity level for each muscle was calculated for each of the pushing tasks, using the peak and mean value from every push of each task.
Statistical analysis
Statistical analysis was completed using IBM SPSS Statistics version 22 (IBM Corp, NY, USA). Homogeneity of variance was analysed in advance of the between-group comparisons using Levene’s test. A split plot ANOVA with two groups (novice and expert) and four repeated measures (level, cross slope, 6.5% incline, 12% incline) was performed for each push rim parameter and kinematic and surface EMG variable. For the repeat measures component of the analysis, when Mauchly’s test indicated that the assumption of sphericity had been violated, degrees of freedom were corrected using the Greenhouse–Geisser estimates. Between-group differences for each outcome measure during each of the tasks were assessed using the independent samples t-test. Significance level was set at p < 0.05.
Results
Push rim kinetics
Push rim kinetics, data are mean (SD), statistically significant results in bold.
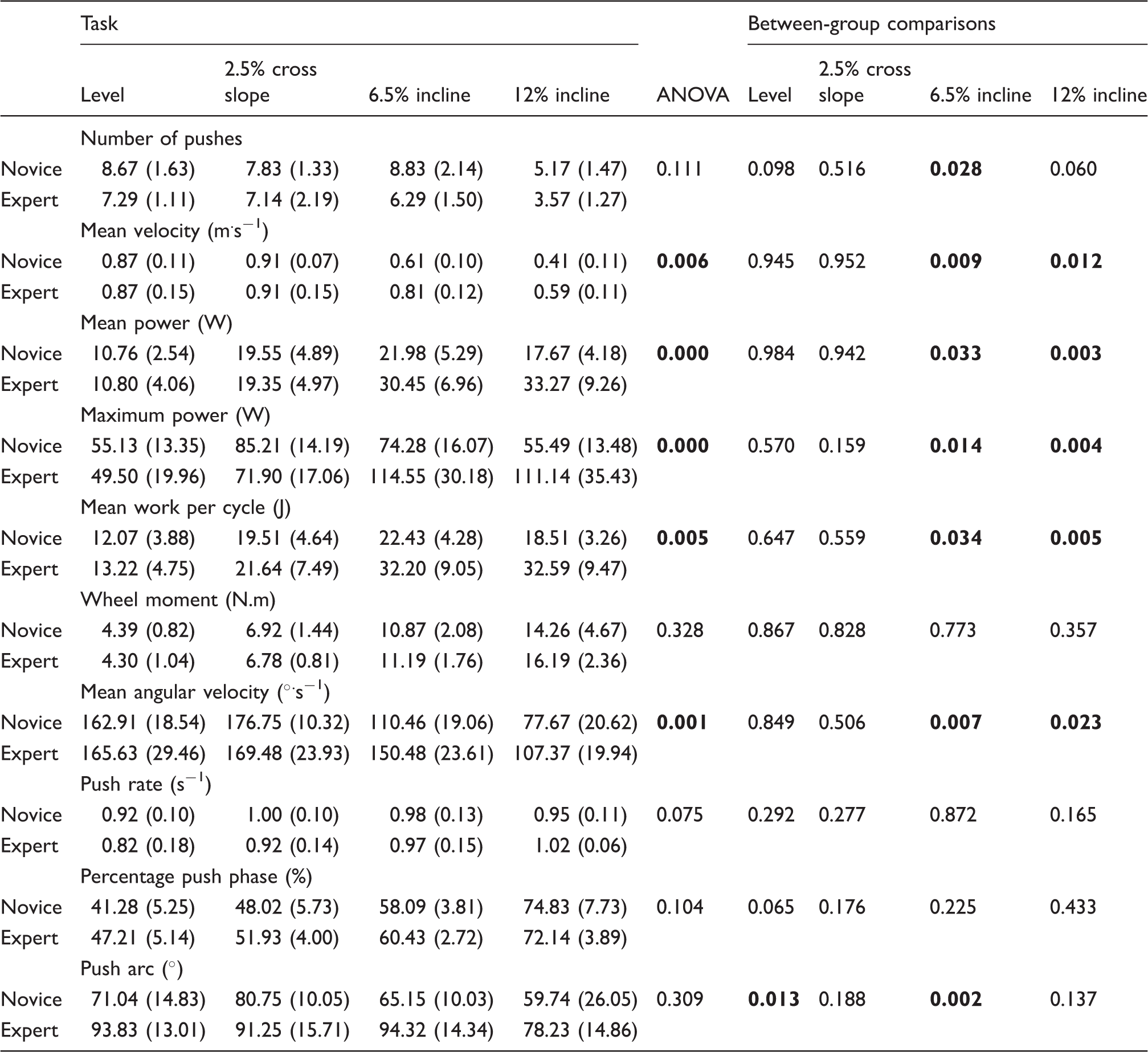
The expert group required fewer pushes compared with the novice group when negotiating each of the propulsion tasks. Although not significantly different, the expert users required fewer pushes to complete the level and cross slope tasks by applying a similar moment over a greater push arc, using a greater percentage of the push cycle. The reduction in the number of pushes required by the experts was significant during the 6.5% incline task (6.29 pushes vs. 8.83 pushes, p = 0.028) and also lower during the 12% incline task (3.57 pushes vs. 5.17 pushes, p = 0.060). The expert group were also able to maintain a higher average velocity during the incline tasks, 6.5% incline (0.81 mċs−1 vs. 0.61 mċs−1, p = 0.009) and 12% incline (0.59 mċs−1 vs. 0.41 mċs−1, p = 0.012).
The expert group completed the incline tasks with fewer pushes while maintaining a higher average velocity by applying a significantly greater average power, 6.5% incline (30.45 W vs. 21.98 W, p = 0.033) and 12% incline (33.27 W vs. 17.67 W, p = 0.003). The expert group generated this significantly greater average power by applying a similar moment to the push rim as the novice group at a greater angular velocity, 6.5% incline (150.48°ċs−1 vs. 110.46°ċs−1, P = 0.007) and 12% incline (107.37°ċs−1 vs. 77.67°ċs−1, p = 0.023). The expert group also applied the moment over a greater push arc, 6.5% incline (94.32° vs. 65.15°, p = 0.002) and 12% incline (78.23° vs. 59.74°, p = 0.137). There were no significant differences between each of the groups across all tasks in terms of push rate and percentage of the push phase. The key differences in propulsion technique between the novices and experts are presented in Figure 1.
Sensewheel data during different propulsion tasks.
Upper limb and trunk kinematics
Thoraco-humeral kinematics, data are mean (SD), statistically significant results in bold.

Trunk kinematics, data are mean (SD), statistically significant results in bold.

The results demonstrated a significant experience level by task interaction for change in trunk flexion angle. During both incline tasks, the expert group demonstrated a significantly greater change in trunk flexion angle compared with the novice group, 6.5% incline (19.96° vs. 7.85°, p = 0.020) and 12% incline (21.26° vs. 8.99°, p = 0.006).
Surface EMG
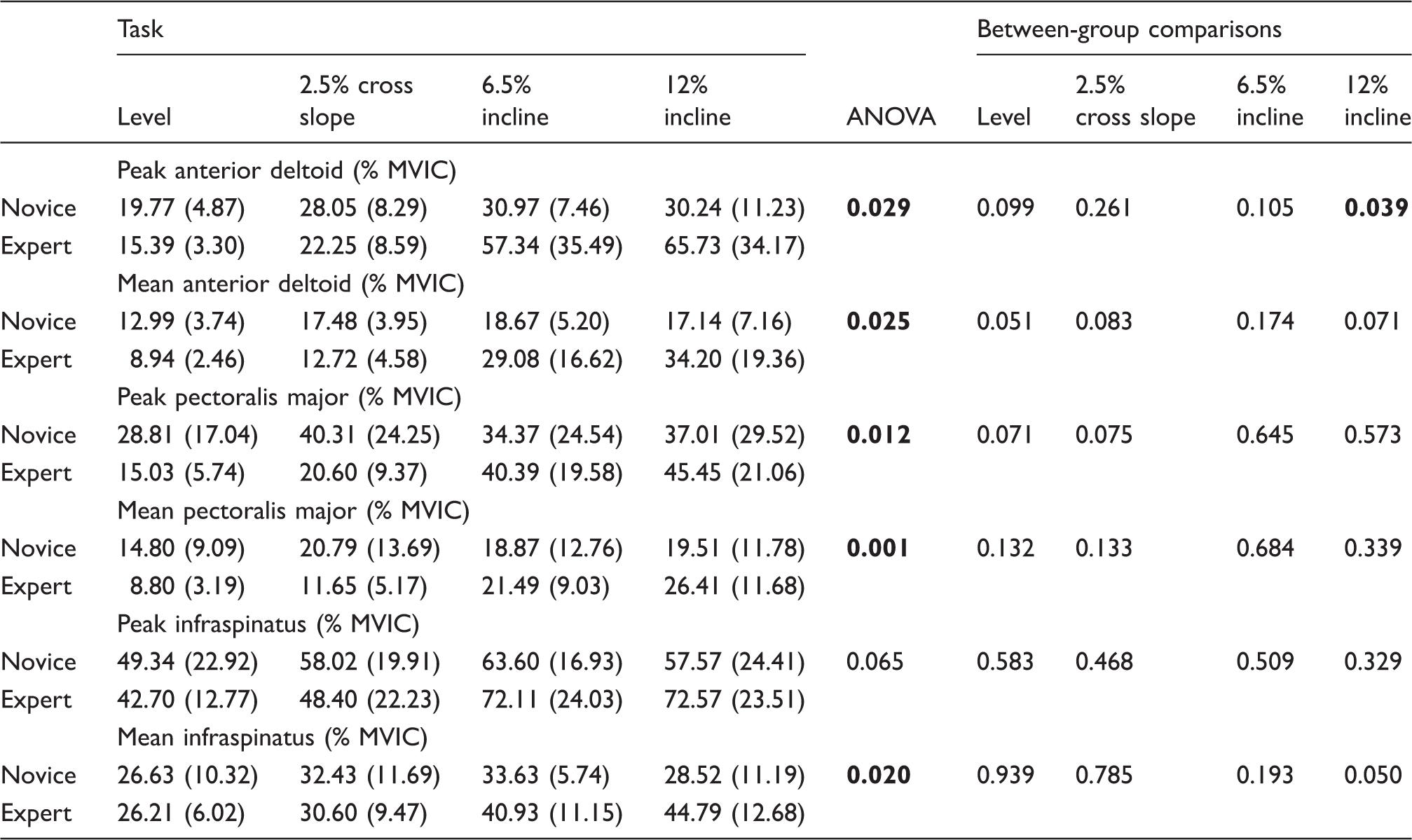
Surface EMG, data are mean (SD), statistically significant results in bold.

Peak muscle activity levels during the propulsion tasks.
Discussion
Push rim kinetics
The results demonstrated a significant experience level by task interaction, with the expert users demonstrating a significantly different propulsion technique to the novices during the incline propulsion tasks. During both incline propulsion tasks, the expert group required fewer pushes, and maintained a significantly higher velocity. They achieved this by generating greater power, by applying a similar moment over a greater push arc, at a significantly greater angular velocity, similar to findings during ergometer-based testing. 7 There were no significant differences in push rate, or percentage push phase. Although not statistically significant, the experts also required fewer pushes to complete the level and cross slope tasks. The expert group closely followed the suggested guidelines in terms of push rate and push arc, while minimising push force. 13
Trunk and upper limb kinematics
The expert users demonstrated a significantly greater change in trunk flexion angle during both of the incline propulsion tasks in comparison with the novices. An increase in trunk flexion angle has been previously reported with progressive increases of incline.14,15 Increasing trunk flexion angle enabled the expert users to apply force to the push rim over a greater arc, without a significant increase in thoraco-humeral flexion angle. Increased trunk flexion has also been previously reported as a mechanism of force production for wheelchair propulsion. 16 These results are of interest, as the expert group demonstrated greater trunk flexion than the novice group despite not having full activity of the trunk and hip flexor muscles.
The only experience level-related kinematic difference in thoraco-humeral angle was that the novice group propelled at a greater abduction angle than the expert group, although this difference was not influenced by change in task. Excessive abduction should be avoided, as the combined posture of extreme shoulder joint extension, abduction and internal rotation at the start of the push phase has been identified as a potential cause of injury. 4 Different propulsion styles have previously been examined, and the semi-circular style of propulsion has been advised to minimise the risk of injury. 17 This study only measured trunk and thoraco-humeral kinematics. In the future, it would be beneficial to examine full upper limb kinematics to analyse the association between propulsion styles, push rim kinetics and muscle activity level during over-ground propulsion.
Surface EMG
The results demonstrated a significant experience level by task interaction for both peak and mean muscle activity level of AD and PM and for mean muscle activity level of IS. For each muscle, during the level and cross slope tasks, the expert group demonstrated lower muscle activity level than the novice group, although there were not significant differences between the groups. The results differ to previous results, which reported significantly greater muscle activity in paraplegic versus able-bodied participants during level ergometer propulsion. 8 These results may differ, as in this study the two groups travelled at the same velocity during the level and cross slope tasks, whereas in the previous study the paraplegic group travelled at a significantly greater velocity. For each muscle during the 6.5% and 12% incline tasks, the expert group demonstrated higher muscle activity levels than the novice group, significantly so for the AD during the 12% incline task. During the incline tasks, the expert group maintained a higher average velocity by applying a similar push rim moment at a greater angular velocity over a greater push arc. Pushing at faster speed has been shown to require higher levels of muscle activity level in both propulsive and recovery muscles. 18
Propulsion technique and injury risk
The guidelines for preservation of upper limb function following SCI suggest minimisation of task repetition and peak forces. 4 The expert group demonstrated a propulsion technique that enabled completion of each of the propulsion tasks with fewer repetitions than the novices. During the less demanding tasks, this technique was also associated with lower peak muscle activity levels than the novices. During the more demanding incline tasks, this technique was associated with significantly higher power output and higher peak muscle activity level than the novices. This highlights the difficulty of informing optimal technique during over-ground wheelchair propulsion. Rotator cuff degeneration is the most common shoulder injury in manual wheelchair users. 1 Animal models have suggested that overuse is one of multiple factors involved in rotator cuff degeneration and injury, 19 and it is theorised that overload of the tendon can lead to micro trauma. 20 It is apparent that when modifying propulsion technique, the complex interaction between task repetition and muscle force requirement should be considered. In future research, it would be useful to calculate how altered propulsion technique influences joint contact forces, to further inform the optimal balance between repetition and peak force. Further investigation is also required to determine how expert wheelchair users are able to generate greater power during challenging tasks. A previous study, investigating ergometer propulsion at different speeds, reported a correlation between muscle strength and force imparted at the push rim. 21 Further research to examine correlation between muscle strength and push rim parameters during challenging over-ground propulsion could be used to inform physical training for manual wheelchair users.
Real-time feedback for wheelchair propulsion training
Previous research has demonstrated the beneficial effect of real-time feedback on wheelchair propulsion biomechanics. During ergometer-based studies, both real-time visual feedback22-26 and real-time haptic feedback 27 have been used to influence wheelchair propulsion biomechanics. A low-cost and lightweight tool such as the Sensewheel has potential to integrate with other systems to provide real-time visual, auditory or haptic feedback during daily functional propulsion tasks. Further research is required to determine whether real-time feedback could be used to train novice wheelchair users in more effective over-ground wheelchair propulsion technique, as demonstrated by the experts during this study.
Limitations
Although the sample size is small, statistically significant differences in propulsion technique between the experts and novices were identified. The expert user group only included paraplegic participants with SCI below T1 and it is highly likely that tetraplegic subjects would demonstrate significantly different technique. 28 The results presented can therefore only be applied to manual wheelchair users with full use of the upper limbs. The generalisability of the findings are also limited as the study only assessed one female and no older participants, who may have demonstrated differences in propulsion technique. The study only measured propulsion biomechanics on the left side. It would be beneficial to measure bilaterally, considering asymmetry in propulsion technique has been previously reported. 29 The upper limb kinematic analysis did not include elbow and wrist joint motion, and thoraco-humeral rather than gleno-humeral motion was measured and reported, which excludes the influence of differences in scapula motion. 30
Conclusion
The purpose of this study was to identify experience-related biomechanical differences during over-ground manual wheelchair propulsion. The results demonstrated that expert users employed a propulsion technique during over-ground tasks requiring fewer pushes than novices. During less challenging tasks, this technique was associated with reduced peak muscle activity levels than the technique used by the novices. During more challenging incline propulsion tasks, this technique was associated with greater muscle activity levels than the technique used by the novices. Further research is required to determine whether real-time feedback during over-ground propulsion could be used to improve propulsion technique in novice wheelchair users.
Footnotes
Acknowledgements
The authors would like to thank all of the study participants and also Nikos Papadosifos and Derrick Boampong for their valuable assistance in preparing the PAMELA Laboratory for the experiment.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project formed part of the UCL Healthcare Engineering for an Ageing Population Studentship. This work was supported by The Engineering and Physical Sciences Research Council and Aspire.