
Abstract
Objective
To analyze the research hotspots and development status of lower extremity rehabilitation robots.
Methods
Publications related to lower extremity rehabilitation robots published between 2007 and 2025 were retrieved from the Web of Science Core Collection. The top 100 most-cited articles were selected for analysis. To conduct co-authorship, analysis of highly cited literature, keyword co-occurrence, clustering, and temporal trend analyses in this field, VOSviewer (version 6.3.R1 (64-bit)), CiteSpace (version 1.6.20), Microsoft Excel 2019 and HistCite were used.
Results
The top 100 most-cited articles were first published in 2007, with citation counts ranging from 61 to 907. These articles were distributed across 42 journals, with the Journal of Neuroengineering and Rehabilitation being the most influential source. A total of 176 institutions contributed to these publications, among which the Swiss Federal Institutes of Technology Domain showed the highest productivity. Keyword analysis identified 528 unique terms, with “rehabilitation,” “walking,” and “stroke” being the most frequently occurring. Cluster and temporal analyses revealed that research has predominantly focused on neurological rehabilitation, particularly gait training after stroke, while studies addressing orthopedic rehabilitation and long-term clinical outcomes remain limited.
Conclusion
Research on lower extremity rehabilitation robots has primarily concentrated on neurological disorders, especially stroke-related gait rehabilitation. In contrast, orthopedic rehabilitation and long-term clinical validation are relatively underexplored and represent important future research directions. Multicenter, large-sample, and long-term follow-up clinical trials are warranted to evaluate the sustained effectiveness and translational value of rehabilitation robots in diverse clinical settings.
Keywords
Introduction
In recent years, with the progress of science and technology, the combination of medicine and artificial intelligence has received more and more attention. In the current wave of rapid development of medical technology, the success rate of surgery has been significantly increased, and the recovery process of patients after surgery is directly related to the overall quality of life of patients after surgery. Traditional rehabilitation often requires the assistance of multiple professional rehabilitation therapists, which is not only labor-intensive but also difficult to quantify and standardize, as the effectiveness of rehabilitation is greatly affected by individual differences. Lower extremity rehabilitation robots are capable of combining knowledge of biomechanics, computer science, rehabilitation medicine, artificial intelligence, etc., to simulate normal walking patterns and provide patients with task-oriented, repetitive movements, thus restoring their muscle strength, lower extremity, and nervous system control. 1 Its core mission is to assist patients who suffer from lower extremity motor function impairment due to different factors to carry out rehabilitation training and help them regain their walking ability. Nowadays, lower extremity rehabilitation robots are widely used in walking dysfunction such as various neurological diseases,2–4 diseases of the musculoskeletal system,5,6 Cardiopulmonary diseases, and other joint contractures caused by long-term braking, muscle atrophy, pressure sores, constipation, postural hypotension, etc. During the rehabilitation training process, the lower extremity rehabilitation robot can provide a safe and efficient walking training platform for patients with walking dysfunction.7,8 Robotics has been developed in the field of rehabilitation for a long time, and a large number of observational and experimental studies have been conducted. Bibliometric analysis refers to qualitative analysis that combines mathematical and statistical methods for evaluating trends in research activities. Documenting and visualizing the evolution of a domain using a network of exploited publications over time. To date, there is a lack of systematic bibliometric analysis of research on lower extremity rehabilitation robots. This study aimed to analyze and review the research hotspots and advances in lower extremity rehabilitation robotics in the top 100 literature citations in order to provide clinical evidence and enhance clinical research in this area.
Methods
Data collection
A literature search was conducted for publications between 2007 and January 17, 2025, using the Web of Science (WOS) database. The specific search strategy was as follows: TS = (“robot” OR “robotic” OR “rehabilitation robot”) AND (“lower extremity” OR “lower limb” OR “gait training”).
Literature screening
The search was conducted without language restrictions. The search covered the period from 2007 to 2025. The study began with an independent reading of the literature by three researchers (Lijia Zhao, Zhu Chuanmei, Lifen Lu) and an initial screening based on the title and abstract of the articles, followed by inclusion and exclusion criteria (inclusion criteria: the literature consisted of academic papers on topics related to the application of rehabilitation robots to lower extremity rehabilitation). (Exclusion criteria: (1) news, newspapers, letters, conferences, reviews, news, journal reviews, non-research articles, etc.; (2) articles that were not considered to be in line with the subject matter after two independent authors independently read the titles and abstracts; (3) dissertations duplicated in the journal papers; (4) papers with incomplete data of paper; (5) study subjects were healthy people). Re-screening was performed, and at the end of the screening, if there was a dispute, the final decision on the trade-off was made by a third evaluator who jointly read through the full text with discussion. Data were extracted using HistCite, including article title, number of citations, year of publication, contributing organization, country, journal of publication, and document type.
Data analysis and visualization
Article title, number of citations, year of publication, contributing institution and country, publishing journal and journal impact factor, and type of literature were analyzed using Microsoft Excel 2019.
CiteSpace is a widely used information visualization and analysis tool in knowledge graph research. 9 This review uses CiteSpace (version 1.6.20) to accomplish visualization. The most commonly used econometric analyses in bibliometric studies include co-authorship analysis, co-citation analysis, and co-occurrence analysis.10,11 The co-authorship analysis aims to examine the collaboration between authors, countries, or institutions based on the number of co-authored articles. 12 After activating the clustering function, the modularity Q and the average silhouette coefficient S have a significant impact on the network visualization to reflect the overall structural characteristics; Q > 0.3 is generally considered to indicate a strong structural network, while S > 0.5 indicates a good rationality and reliability of the clustering results. 13 VOSviewer is a software application for scientific knowledge mapping analysis, which analyzes the knowledge units of the literature by constructing associations between them and visualizing them, thus revealing the structural features, developmental veins, and their interrelationships in the knowledge domain. 14 The clustering algorithm of CiteSpace and VOSviewer software is mainly based on the correlation strength algorithm. 15 The high-frequency keywords in the text were selected for clustering analysis, and the co-occurrence of the institute and all keywords was analyzed using CiteSpace, while VOSviewier analyzed co-authorship. 9 In addition, representative co-cited journals and references were constructed, along with associated visual maps. 16 The size of the nodes represents the number of publications or citations, while the thickness of the lines represents the intensity of co-authorship or co-citation. 14 Their combined use enhances the robustness and interpretability of bibliometric analyses by enabling a more comprehensive mapping of research hotspots, themes, and collaboration structures. 17
Results
Table 1 lists the top 100 publications. A total of 459 authors and 76 countries were involved, with papers published in 42 journals from 176 institutions across two categories of articles. A detailed analysis was performed to further visualize the relationships between authors, countries, journals, and institutions. We accessed the IF (2025) of the journal on Med Sci (Table 2).
List of the top 100 publications and the number of citations.

List of Journals of the top 100 publications.

The annual output trends of publications
The top 100 publications were published between 2007 (n = 6) and 2019, with the highest number of articles being issued in 2017 (n = 12) (Figure 1). In both 2009 and 2011, 10 papers were on the list, followed by 2008 (n = 9), 2010 (n = 9), and then after 2011, the number of cited articles declined in order: 2012 (n = 7), 2013 (n = 6), 2014 (n = 5), and 2015 (n = 9) there is a brief rebound; 2016 (n = 5) there is a decline; 2018 (n = 6) and 2019 (n = 6) tend to stabilize, which reflects the international attention to lower extremity rehabilitation robots is increasing.

The annual output trends of the top 100 publications.
Journals of publications and impact factor (IF)
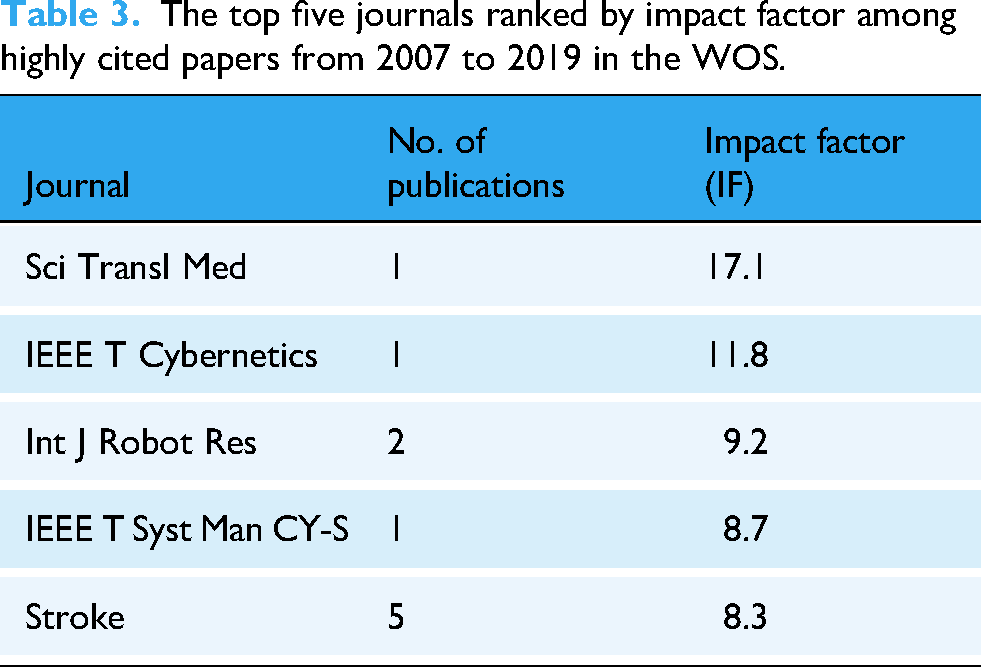
The top 11 journals according to the highest number of citations were as follows: Journal of Neuroengineering and Rehabilitation 18 (n = 17, IF = 5.1), Neurorehabilitation and Neural Repair 19 (n = 12, IF = 4.2), IEEE Transactions on Neural Systems and Rehabilitation Engineering (n = 11, IF = 4.9), STROKE20,21 (n = 5, IF = 8.3), Robotics and Autonomous Systems (n = 4, IF = 4.3), IEEE ASME Transactions on Mechatronics (n = 3, IF = 6.4), Journal of Biomechanics (n = 3, IF = 2.4), Multiple Sclerosis Journal (n = 3, IF = 5.8), Archives of Physical Medicine and Rehabilitation (n = 2, IF = 4.3), Gait Posture (n = 2, IF = 2.4), IEEE Robotics and Automation Letters (n = 2, IF = 5.2). The IF of the top five journals was as follows (Table 3, Figure 2).

Journals of the top 100 publications and impact factor (IF).
The top five journals ranked by impact factor among highly cited papers from 2007 to 2019 in the WOS.
Countries/regions of publications
A landscape view of countries/regions generated by g-index (K = 10) per slice from 2007 to 2019. (LRF: link retaining factor = 2.5, L/N: links per node = 10, LBY: look back years = 5, and e: selection criterion = 1.0). Network: N: nodes = 135, E: edges = 559 Density = 0.0618). Twenty-four countries from six continents contributed to the top 100 most cited publications based on the address of the corresponding author. The top 100 countries with ≥3 publications were as follows: United States (USA) contributed the most publications (n = 42, North America), followed by Italy (n = 16, Europe), Switzerland (n = 16, Europe), Germany (n = 8, Europe), Netherlands (n = 8, Europe), South Korea (n = 8, Asia), China (n = 7, Asia), Israel (n = 5, Asia), Spain (n = 5, Europe), Japan (n = 5, Asia), New Zealand (n = 3, Oceania), Sweden (n = 3, Europe) (Figure 3 and Figure 4). Fourteen countries were located in Europe, contributing 67 publications, and two countries were located in North America and contributed 43 publications; six countries were from Asia with 28 publications.

Countries/regions of the top 100 publications.

Co-occurrence map of country/region cooperation in the field of rehabilitation robots from 2007 to 2019 included in the WOS.
Analysis of highly cited literature
Among the top 100 cited documents retrieved, the total citation frequency of the documents was 13,286 times, and the top three source journals were IEEE Transactions on Neural Systems and Rehabilitation Engineering, IEEE Transactions on Neural Systems and Rehabilitation Engineering, and Neuro rehabilitation and Neural Repair. However, the combined frequency and proportion of citations and the quality of the articles all need to be further improved. And the highly cited literature was all published earlier, possibly because new, high-quality literature was published later, resulting in a relatively low citation frequency. The first article is on the design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation, a lower extremity rehabilitation robot with a wide range of non-daily applications for stroke patients 22 ; the second most cited paper in the literature describes the effects of the ALEX rehabilitation robot in two stroke patients, and the results show that the patients’ knee and ankle offsets and walking speeds improved, and the patients’ gait became closer to that of healthy individuals 23 ; the third most cited paper in the literature describes a multicenter randomized controlled clinical trial of the effectiveness of the Lokomat robot in subacute stroke patients, which showed that robot-assisted training improved walking ability less than traditional gait training in subacute stroke participants with moderate-to-severe gait impairment. 24 It can be seen that more evidence is needed in terms of the rehabilitation of lower extremity rehabilitation robots for walking ability in subacute stroke participants with moderate-to-severe gait impairment.
List of institutions covered in two or more articles of the top 100 publications.

Institute network of the top 100 publications
Use CiteSpace and create a network as usual: 2007–2019, 1-year slice length. A node type was chosen: Institution, g-index (k = 15), (LRF = 2.5, L/N = 10, LBY = 5, and e = 1.0). Network: N = 138, E = 201 (Density = 0.0213). Institutions that contributed to two or more publications are listed in Table 4. Sixty-nine institutions contributed to the top 100 most cited articles. The institutions with ≥5 of the top 100 most cited articles are as follows: The institutions that contributed the most to the top 100 most cited publications are the Swiss Federal Institutes of Technology Domain (n = 10, Switzerland), followed by the University of Zurich (n = 9, Switzerland) and the Federal Institute of Technology Zurich (n = 8, Switzerland), Northwestern University (n = 6, United States), Shirley Ryan Ability Lab (n = 6, United States), University of Michigan (n = 6, United States), University of Michigan System (n = 6, United States), Hocoma AG (n = 5, Switzerland), and Harvard University (n = 5, United States). Figure 5 shows that the Swiss Federal Institute of Technology (FIT) field (n = 10, Switzerland), the University of Zurich (n = 9, Switzerland), and ETH Zurich (n = 8, Switzerland) are part of the same institution. There was a strong covariance between Northwestern University (n = 6, United States) and the Shirley Ryan Ability Lab (n = 6, United States).

The institute network of the top 100 publications.
Co-authorship network of research
A total of 459 authors were involved in the 100 most cited publications. The results in Figure 6 show that 90 of all authors have a strong covariate relationship. Ferris, Daniel P.25–29 (n = 6), Riener, Robert30,31; Koenig, Alexander (n = 4); Luenenburger, Lars (n = 4); and Waldner, Andreas (n = 4) have larger and more influential nodes. The following authors are not strongly associated with the authors listed above but have a greater number of highly cited articles: Bramanti, Alessia (n = 3), Bramanti, Placido (n = 3), and Calabro, Rocco Salvatore (n = 3).

The co-authorship network of the top 100 publications.
Keywords co-occurrence analysis of research
When limiting the minimum number of occurrences of the keyword to 5, a total of 46 items are included. After excluding invalid keywords, 46 items remain.
Analysis of research hotspots based on keyword co-occurrence
Through keyword co-occurrence analysis, the high-frequency keywords (46) with a frequency greater than or equal to 5 times were statistically ranked. The top three high-frequency keywords are “rehabilitation” (57 times), “walking” (41 times), and “stroke” (38 times). These high-frequency keywords represent the focus of scholars’ attention, indicating that research and therapeutic measures for rehabilitation, stroke, and walking function have become a hot topic in current research, as shown in Figure 7. A co-occurrence view of high-frequency keywords for rehabilitation robotics research was plotted using CiteSpace software. A co-occurrence map of high-frequency keywords analysis generated by g-index (K = 15) per slice from 2007 to 2019 (LRF = 2.5, L/N = 10, LBY = 5, and e = 1.0). Network: N = 182, E = 700 (=ensity = 0.0425), as shown in Figure 7.

Co-occurrence map of high-frequency keywords in the field of rehabilitation robots from 2007 to 2019 included in the WOS.
Analysis of research hotspots based on keyword clustering
The nodes were revised based on the co-occurrence of keywords, and the log-likelihood (LLR) algorithm was used to calculate clustering. That can be seen in Figure 8. A landscape view of keyword cluster analysis generated by g-index (K = 15) per slice from 2007 to 2019 (LRF = 2.5, L/N = 10, LBY = 5, and e = 1.0). Network: N = 184, E = 695 Density = 0.0413). The Modularity Q score was 0.5765, and the Mean Silhouette score was 0.8414. There were a total of nine clusters, which are #0 Body weight support, #1 Robot-assisted gait training, #2 Wearable robotics, #3 Robotics, #4 Balance control, #5 Robot control, #6 Stroke rehabilitation, #7 Neurorehabilitation, and #8 Pneumatic muscle actuator, as shown in Figure 8. The time dynamics of clustering keywords are shown in Figure 9, showing the CiteSpace visualization map of the timeline view. The time evolution is indicated with different colored lines, and the nodes on the lines indicate the keyword clusters’ appearance. The timeline, as an example, shows the temporal dynamics of the clustered keywords. From 2007 to 2010: paralyzed patients/stroke patients, spinal cord injury: weight support, treadmill walking, motor gait rehabilitation. The keywords “adaptive control,” “assisted treadmill walking,” “cerebral palsy,” “mechanized gait,” “hemiplegic patients,” “clinical trials,” and “biomechanics” received increasing attention during this period, reflecting growing interest in both control strategies and clinical application. The period from 2011 to 2015 was characterized by intensified research activity and thematic expansion in lower extremity rehabilitation robotics. High-frequency keywords included “lower-limb exoskeleton,” “limb exoskeleton,” “multiple sclerosis,” “robot-assisted gait training,” “effectiveness,” “validity,” “assistive technology,” “design,” “stroke rehabilitation,” “physical therapy,” “recovery,” “impedance control,” and “robotic orthotic actuator.” These terms indicate a shift toward exoskeleton-based systems, clinical validation studies, and the integration of biomechanical design with rehabilitation outcomes. Research on ankle joint mechanisms and foot orthopedic applications also gained increasing visibility during this phase. Between 2016 and 2017, emerging topics such as “joint moments,” “robotic exoskeletons,” “pediatrics,” “virtual reality,” “boundary element methodology,” and “assisted gait training” became more prominent, suggesting further diversification of research directions and technological integration.

Keyword clustering map in the field of rehabilitation robots from 2007 to 2019 included in the WOS.
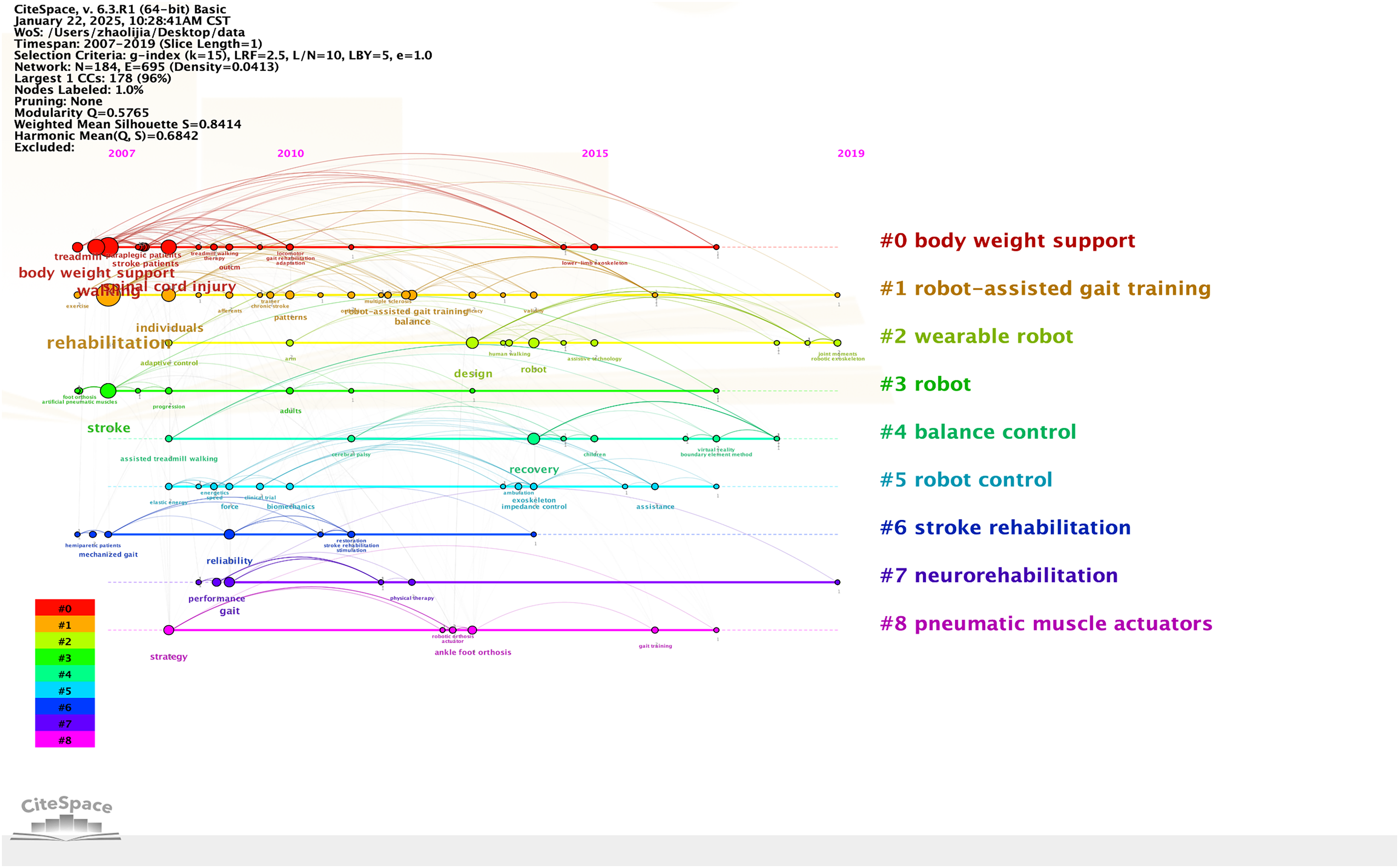
Dynamic evolution of keywords in the field of rehabilitation robots from 2007 to 2019 included in the WOS.
Discussion
Rehabilitation robotics in lower extremity rehabilitation publications and journals
In this bibliometric study, we aimed to analyze the top 100 most cited publications on rehabilitation robotics applied to lower extremity rehabilitation between 2007 and 2019 and to explore their trends and hotspots. In general, articles with 100 or more citations are considered “classic.” Among the top 100 publications, 45 documents were cited more than 100 times (Table 1). The year chart shows that the highest number of publications was in 2017 (n = 12). More than 50% of the high citation frequency publications were published between 2007 and 2011, which is at odds with our traditional perception that the longer the year, the higher the citation frequency. This also suggests that research on the use of rehabilitation robots for lower extremity rehabilitation became more mature between 2007 and 2011. Of the 42 journals, the journals with the highest IF are Science Translational Medicine (n = 1, IF = 17.1). IF data for the top three journals were obtained from MedSci. However, a direct relationship between citation frequency and publication IF was not observed. For example, in the Journal of NeuroEngineering and Rehabilitation, the citation frequency is 17 while the IF is 5.1 32 ; however, in Science Translational Medicine, the citation frequency is 1 while the IF is 17.1. When the IF is very high, the number of highly cited articles is low, probably because the difficulty of the submission conditions (Science Translational Medicine, n = 1) is relatively great. Therefore, judging the value of an article by citation frequency or the number of highly cited articles, or by the IF value of the article/journal, introduces some bias.
Rehabilitation robotics in lower extremity rehabilitation research hotspots: countries (regions), institutions, and authors
In terms of the countries from which publishers come, the United States ranks first (42%), which may be due in large part to the earlier development of the US rehabilitation apparatus and the broader scope of rehabilitation research. This was followed by Italy (16%) and Switzerland (16%), and according to the geographical analysis, 14 countries were located in Europe, contributing 67 publications; two countries were located in North America, contributing 43 publications; six countries were from Asia, with 28 publications. These country-level patterns reflect relative bibliometric visibility within research networks, rather than standardized research efficiency or the impact of funding adjustments. Paper output and number of citations are influenced by structural factors such as research infrastructure, long-term investment, and the maturity of industry–university–research collaborations. The analysis of the publishing organizations shows that the Swiss Federal Institutes of Technology Domain, University of Zurich, and ETH Zurich belong to the same organization. There is a strong covariance between Northwestern University and Shirley Ryan Ability Lab. The Swiss Federal Institutes of Technology Domain demonstrated high research productivity and citation impact in lower extremity rehabilitation robotics according to the present bibliometric analysis. The Lokomat rehabilitation robot developed by the institution has been extensively investigated and has contributed substantially to technological innovation and clinical application in lower extremity rehabilitation. In 2020, researchers at Northwestern University developed the first soft robot that could act as a soft robot, walk at simulated human speeds, pick up and transport objects, and had a huge impact on the international academic community.33–35 Colgate, a professor at Northwestern University, has developed a lower extremity rehabilitation training mechanism that allows for weight-bearing training of the lower extremities. 36 Shirley Ryan Ability Lab (formerly the Rehabilitation Institute of Chicago) has been ranked No. 1 in the U.S. Rehabilitation Hospital Rankings by U.S. News & World Report for 28 consecutive years since 1991 and is also known as the world's first “translational research” rehabilitation hospital. The hospital is also known as the world's first “translational research” rehabilitation hospital, which applies rehabilitation robots to lower extremity rehabilitation and has a high reputation and authority in the international arena. This shows that the rehabilitation robots of these organizations have been at the forefront of the world in the field of lower extremity rehabilitation. As can be seen in Figure 4, the close cooperation between the organizations with high levels of R&D in the international arena has made excellent contributions to the development of rehabilitation robots. Ferris, Daniel P.25–29 and Riener, Robert30,31 led the field in Author Collaboration Mapping by a wide margin. Professor Ferris, Daniel P.25–29 has published mostly in collaboration with Sawicki, GS, and Lewis CL. Riener, Robert.30,31 Scholars have published mostly in collaboration with Duschau-Wicke A, Caprez A, and Lunenburger L. Strong co-citation relationships also exist between some authors. Thus, there may be a cooperative relationship between authors or between selection preferences. In general, articles published by authorities in a certain field are more likely to be cited. More frequent and close communication and cooperation among high-impact authors can better promote the development of international rehabilitation robotics research, which is more indicative of the formation of a core group of authors in the field of rehabilitation robotics for lower extremity rehabilitation, i.e., focusing on the research direction of these authors can provide a better understanding of the frontiers and trends of the development of rehabilitation robotics in the field of lower extremity rehabilitation, as shown in Figure 6.
Research hotspots, frontiers, and trends of rehabilitation robotics in the field of lower extremity rehabilitation
The co-occurrence of keywords in the first 100 papers shows that research is mainly focused on the following aspects: rehabilitation (57 times), walking (41 times), and stroke (38 times). These keywords reflect the focus of scholars’ attention, indicating that the research and therapeutic measures of rehabilitation, stroke, and walking function have become the hotspots of current research. According to the keyword clustering analysis (Figure 8), using the classical LLR algorithm, a total of eight clusters were obtained, which are #0 body weight support, #1 robot-assisted gait training, #2 wearable robot, #3 robot, #4 balance control, #5 robot control, #6 stroke rehabilitation, #7 neurorehabilitation, and #8 pneumatic muscle actuators. See Figure 8, where a higher degree of aggregation indicates better homogeneity between studies. Timeline view (Figure 9) is used to show the temporal dynamics of the clustered keywords. The international academic attention to the research hotspots in the field of rehabilitation robot lower extremity rehabilitation reflects the main direction of the development of rehabilitation robots. Clinical research on rehabilitation robots mainly covers three areas. First, Exoskeleton robots, such as EksoGT, ReWalk, and HAL, have been widely used in the lower extremity rehabilitation of patients with spinal cord injury, stroke, and cerebral palsy to help restore walking ability, and several studies have shown that the exoskeleton robots can significantly improve the patient's gait and motor function, and have a high degree of safety. Second, Gait training robots, such as Lokomat and G-EO System, and other gait training robots help patients restore their natural gait through weight loss walking training and virtual reality technology. Clinical studies have shown that these devices are effective in gait recovery of patients with stroke and spinal cord injuries, and are better than traditional therapies. Third, Intelligent Prosthetics: Intelligent Prosthetics can be automatically adjusted according to the user's motor intention through sensors and AI technology to provide a more natural gait. More natural gait, clinical research shows that smart prosthesis can significantly improve the walking ability and quality of life of amputation patients. Although the application of rehabilitation robots in lower extremity rehabilitation significantly improves the effect of patients’ motor function recovery, especially in gait training and muscle strength enhancement, the existing studies mostly focus on short-term effects, and there is insufficient data on long-term effects. Therefore, multi-center, large-sample, long-term follow-up clinical trials are recommended to verify the long-term efficacy of rehabilitation robots in different clinical settings.
Translational implications for orthopedic rehabilitation
Bibliometric analysis revealed a clear predominance of neurorehabilitation and stroke-related studies in the highly cited literature on lower extremity rehabilitation robotics, while orthopedic applications remain underrepresented. This imbalance reflects both genuine clinical priorities (given the global burden of stroke and the applicability of robotic gait training to neurological injuries) and bibliometric bias related to citation accumulation and database coverage. In contrast, orthopedic rehabilitation involves heterogeneous diseases and study designs, which may limit citation concentration despite clear clinical relevance. From a translational perspective, orthopedic patients undergoing arthroplasty or postoperative recovery require structured and load-controlled gait training that matches robotic capabilities. The scarcity of highly cited orthopedic studies highlights the need for future multicenter and long-term clinical trials to evaluate the effectiveness of robotic rehabilitation versus traditional therapy in orthopedic populations.
Qualitative comparison of robotic rehabilitation with conventional treatment
Highly cited clinical trials on robots for lower extremity rehabilitation have compared outcomes such as gait speed, walking endurance, balance, and motor recovery compared to conventional rehabilitation. Qualitatively, robot-assisted rehabilitation is often reported to have advantages in terms of training intensity, task repetition, and motor standardization, thus enabling high-dose, task-specific gait training that is difficult to achieve with manipulative therapy alone. However, the functional benefits of this therapy over conventional rehabilitation have not been consistently demonstrated, with several studies reporting comparable outcomes when given conventional therapy of sufficient intensity. In addition, evidence on long-term functional preservation and real-world effectiveness remains limited, with orthopedic rehabilitation trials significantly underrepresented among highly cited studies. Overall, the results of these studies suggest that robotic rehabilitation may augment the delivery of training and that its incremental clinical benefit relative to conventional treatment may depend on patient characteristics, disease stage, and rehabilitation context, emphasizing the need for long-term, orthopedic-focused clinical studies.
Strengths, novel contributions, and limitations of the study
The substantive contribution of this study lies in its focused analytical scope and strong clinical orientation. Unlike most bibliometric studies since 2022 that adopt broad, cross-disciplinary perspectives on rehabilitation robots or exoskeletons, emphasizing publication growth and technology-driven trends across heterogeneous datasets, this work examines the 100 most-cited publications on lower extremity rehabilitation robots in the Web of Science Core Collection. This design enables the identification of seminal studies and stable knowledge structures with sustained influence on both technological development and clinical practice. By integrating CiteSpace and VOSviewer, the analysis extends beyond descriptive mapping to reveal major thematic structures and clinically relevant translational gaps, particularly the underrepresentation of orthopedic rehabilitation and the limited long-term clinical validation. Consequently, this study complements recent engineering-oriented, multi-database analyses by offering a concise and clinically informed synthesis of high-impact research and unresolved translational challenges in lower extremity rehabilitation robotics. Key limitations include possible underrepresentation of conference-based engineering research, citation-lag bias favoring older publications, the potential influence of language restrictions and self-citation practices, limited assessment of research efficiency at the country and institutional levels, and the fact that bibliometric indicators reflect academic impact rather than clinical effectiveness, all of which should be considered when interpreting the findings. In particular, although the search period extends to 2025, papers published in 2007–2019 dominate the top 100 most frequently cited articles, which may reflect the dynamics of citation maturation rather than selective data truncation. Citation-based rankings inherently favor older publications that have had sufficient time to accumulate scholarly impact. Thus, more recent studies, despite their emerging scientific significance, may be underrepresented in this analysis. It is therefore necessary to continually update citation data to provide a more comprehensive and time-balanced picture of evolving research trends.
Conclusion
This study provides a comprehensive scientometric analysis of research hotspots, influential studies, and trends in the field of lower extremity rehabilitation robotics by analyzing the top 100 most highly cited papers included in the Web of Science Core Collection from 2007 to 2025. By analyzing the highly cited literature, paradigm-shaping research, and core knowledge structures that have had a sustained impact on the development of rehabilitation medicine technology and clinical exploration are identified. Findings indicate that current high-impact research in lower extremity rehabilitation robotics is focused on neurological rehabilitation and stroke-related applications, while orthopedic rehabilitation and long-term clinical validation remain relatively scarce. This imbalance highlights important translational gaps and underscores the need for future multicenter, large-sample, and long-term clinical studies to evaluate the effects of robotic rehabilitation in a broader patient population, particularly in orthopedics. From a methodological perspective, this study demonstrates the value of combining CiteSpace and VOSviewer to map research themes, collaboration structures, and emerging directions in a focused and clinically oriented manner. At the same time, caution should be exercised in interpreting the results due to the inherent limitations of citation-based analysis, including database dependence and citation lag effects. Based on the temporal evolution of the bibliometric analysis and the emergent keyword patterns, future research directions in lower extremity rehabilitation robotics may increasingly involve artificial intelligence, virtual reality, brain–computer interfaces, wearables, or integration of flexible robotic systems. These technologies do not represent established hotspots, but rather serve as emerging research signals that require further systematic research. Future efforts should prioritize the development of adaptive, patient-centered rehabilitation robots by integrating flexible sensing technologies, intelligent algorithms, and dynamic monitoring systems to better respond to an individual's motor intentions. Finally, interdisciplinary collaboration between rehabilitation medicine, robotics, and artificial intelligence, as well as a greater focus on user-centered design and acceptance by patients and therapists, will be critical to advancing the clinical translation and real-world implementation of lower extremity rehabilitation robots.
Footnotes
Ethical approval
This article does not apply to Human Ethics and Informed Consent to Participation. Human Ethics and Consent to Participate declarations: not applicable.
Patient consent
Not applicable.
Author's contributions
Lijia Zhao: conceptualization, data curation, formal analysis, investigation, methodology, software, visualization, writing-original draft, writing-review & editing; Chuanmei Zhu: methodology, software, visualization, supervision; YuJie Xie, Li Wang, Xi Luo and Lifen Lu: methodology, supervision; YuXiu Ji, Xin Zeng, Shengjian Wu and Pan Huang: supervision, validation; Chi Zhang: conceptualization, funding acquisition, resources, supervision, validation, writing-original draft, writing-review & editing.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Sichuan Provincial Science and Technology Department (grant number 2024YFHZ0050), the Luzhou City Science and Technology Bureau (grant number 2024LZXNYDJ035), Cooperation Project between the Second People's Hospital of Deyang and Southwest Medical University [grant number 2022DYEXNYD002], Special Project for Central Government-Guided Local Sci-Tech Development in Sichuan Province [grant number2024 ZYD0269], the Luzhou City Science and Technology Bureau [grant number 2024RCM25].
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Availability of data and materials
The data that support the findings of this study are available from the corresponding author upon reasonable request.