
Abstract
Point stabilization control of a class of asymmetric underactuated high-speed unmanned marine vehicle is discussed, and a robust exponential stabilization control algorithm is proposed based on homogeneous theory, average system theory, and nonlinear backstepping technology. Firstly, point stabilization control problem of a high-speed underactuated unmanned marine vehicle with model asymmetry is formulated, and then global differential homeomorphism transformation is designed, in order to overcome the difficulties caused by unmanned marine vehicle with model asymmetry. Secondly, the control system is transformed into the standard form of homogeneous interference system by output state variable transformation design and input transformation design. A novel interference function is designed, and then difficulties caused by the higher order velocities in damping coefficients are solved, via homogeneous stability design and homogeneity degree analyzing the expansion of the designed new state variables. Thirdly, by introducing the virtual input of backstepping and the average system theory, point stabilization controller for the underactuated high-speed unmanned marine vehicle is proposed based on homogeneous theory, which could achieve global and periodic time-varying robust exponential stability, and then stability of the point stabilization control algorithm is proved by using homogeneous stability theory and average system stability theory. At last, the effectiveness and accuracy of the control algorithm proposed is verified by semi-physical simulation experiment carried out in our laboratory.
Introduction
Unmanned marine vehicle (UMV), usually used as a generic term to describe autonomous underwater vehicle (AUV) and unmanned surface vessel (USV), can be used to perform a multitude of different tasks, such as mineral resources sampling, offshore oil and gas operations, ocean engineering maintenance, and military reconnaissance, and it is attracting more and more interest from the scientific, commercial, and naval sectors. 1 –4 Although much advancement have been realized in this area, the demand for more advanced navigation, guidance, and control systems for UMVs continues to grow, as more and more vehicle autonomy is required. 5 –8 In practical implementation, many UMVs are designed of underactuated configurations due to practical considerations, for example, reducing weight and/or cost. 9 –12 Point stabilization is the most basic case of the motion control of UMV, where the desired position and attitude are chosen to be constant, and it is the important foundation of path following and trajectory tracking of UMV. 13 –15
A state feedback-based backstepping control algorithm is proposed by Dong et al. to address the point stabilization control problem for an underactuated AUV, where an additional error integral action is incorporated for enhancing the steady state performance of the AUV control system. 16 The horizontal waypoint tracking problem for a class of nonlinear AUVs is formulated as an exponential stabilization of the error dynamics with respect to the desired surge speed and the desired yaw angle determined from the line of sight, and the feedback linearization technique is used to make the separate design of the available control inputs. 17 Stabilization of the path following error is discussed by Caharija et al. for an underactuated UMV, and a Lyapunov closed-loop analysis yields explicit bounds on the guidance law gains to guarantee uniform global asymptotic stability and uniform local exponential stability of the UMV control system. 18 The constrained tracking control of the UMV is transformed into the stabilization of an unconstrained system by Dai et al. with the introduction of an error transformation function, and then a filtered tracking error is introduced based on the error transformation, and radial basis function neural networks are employed to approximate unknown UMV dynamics. 19 Global asymptotic stabilization of an underactuated UMV is achieved only by designing a very simple control law, which could globally asymptotically stabilize the position of underactuated surface vessel to a desired constant location and its velocities to zero. 20 A novel model predictive control algorithm is proposed for the stabilization problem of underactuated AUV with control input constraints, based on the homogeneity of system model and an existing time-varying control law. 21 An adaptive output feedback stabilization control law for tracking error of an underactuated USV is proposed by Park et al., and the mass and damping matrices of the USV model are not diagonal. 22 Trajectory following and stabilization control of a fully actuated AUV is discussed by using inverse kinematics and self-tuning fuzzy proportional integral derivative control method, 23 while an adaptive fuzzy output feedback stabilization control law is proposed by Lin et al. for an underactuated UMV, via backstepping technique and Lyapunov direct method. 24 A sliding mode controller is proposed by Zehar et al. for the stabilization of the tracking errors, and the underactuated system is decomposed into two subsystems, where the sliding surface is constructed in two levels for each subsystem. 25 In order to realize three-dimensional stable control of an underactuated UMV, a nonholonomic stabilization control law is proposed by Li et al., and quaternion theory is applied to transform the function to develop a continuous time-varying controller. 26 Wang et al. designed a Takagi–Sugeno (TS) fuzzy stabilization control law for an UMV, where the stability and stabilization criteria are derived by taking into consideration an asynchronous difference between the normalized membership function of the TS fuzzy system and that of the controller. 27 Zhang et al. investigated the problem of global asymptotic stabilization of an underactuated UMV, with dynamics features off-diagonal inertia and damping matrices, by using input and state transformations, the dynamic model of USV is converted into an equivalent system consisting of two cascade connected subsystems, and then a continuous fractional power control framework is proposed to achieve global asymptotic stabilization of USV control system. 28 Meanwhile, Wang et al. proposed several time-delay estimation methods for the UMV control algorithm design. 3,11,29 –31 Trajectory tracking control problem of an USV is transformed into stabilization control problem by Qu et al., and an estimator-based backstepping controller is presented, which could ensure the closed-loop tracking system to be globally exponentially stable, and the trajectory tracking error and the estimation error are globally exponentially stable. 32
By analyzing the existing research results described above, we found that, at present, most of the research results on point stabilization control are based on traditional UMV sailing at a relative low speed, while there are few related results for high-speed UMV. At the same time, the research on model asymmetry of UMV is not deep enough and detailed transformation design and related research results have not been obtained in depth. Furthermore, the study of higher order velocity terms in damping coefficients is not expanded in detail, and considering some practical difficulties, many studies ignore their effects on point stabilization control system. However, while an UMV is sailing at high speed, the higher order velocity terms in damping coefficients are larger, which usually could not be ignored.
Motivated by the above considerations and analysis, a robust exponential point stabilization control algorithm is proposed for an underactuated UMV sailing at high speed, based on homogeneous theory. Compared with the existing research results on point stabilization control algorithm designed for UMVs, the main contributions of this article are as follows: (i) point stabilization control of an underactuated high-speed UMV is discussed in this article, while there are few related results for high-speed UMV in the existing research papers; (ii) model asymmetry of UMV is deeply studied in this article, and the control design process is novel compared with the existing research papers; (iii) a robust exponential point stabilization control algorithm based on homogeneous theory is firstly proposed in this article for high-speed UMV; (iv) a novel interference function is designed during the control design process in order to overcome the difficulties brought by the damping matrix with the higher order velocity terms; (v) point stabilization control algorithm designed in this article is improved by introducing the virtual input of backstepping and the average system theory; (vi) stability of the point stabilization control algorithm is proved by using homogeneous stability theory and average system stability theory, while most current literatures are based on Lyapunov stability theory.
The remainder of the article is organized as follows. Point stabilization control problem of an asymmetric underactuated high-speed UMV sailing in the horizontal plane is described in the “Problem formulation” section, and a novel robust exponential point stabilization controller is designed by combining with output state variable transformation design and input transformation design in the “Controller design” section. The stability of the controller proposed is proved by homogeneous stability theory and average system stability theory in the “Stability analysis” section, and some simulation experiments of the underactuated high-speed UMV point stabilization control are carried out in the “Simulation experiment” section. In the “Conclusion” section, some research results are obtained and some future works are shown.
Problem formulation
In this section, point stabilization control problem of an asymmetric underactuated high-speed UMV sailing in the horizontal plane is formulated. The kinematic and dynamic system equations of the underactuated high-speed UMV without symmetry fore/aft are presented in the “UMV modeling” section, while point stabilization problem statement for the underactuated UMV is provided in the “Problem statement” section.
UMV modeling
An underactuated high-speed UMV without symmetry fore/aft is considered here, the state of the UMV is given by the vector

Inertial reference frame and body-fixed reference of UMV. UMV: unmanned marine vehicle.
According to the literature, 33 the kinematics and dynamics equations of the asymmetric underactuated high-speed UMV sailing in the horizontal plane can be expressed as

with

and

with

where
Problem statement
The general control problem of point stabilization for an underactuated high-speed UMV that we consider in this article can be formulated as follows: consider the model of an underactuated asymmetric high-speed UMV given by (1). Let
Controller design
A robust exponential point stabilization control law for an underactuated high-speed UMV with model asymmetry is presented in this section, and the main process of the controller design and its implementation is shown in Figure 2.

Controller design process and its implementation.
Coordinate transformation
In order to solve the difficulties brought about by UMV model asymmetry, coordinate transformation needs to make the kinematic and dynamic equations of the UMV easier, and simplify the point stabilization control system according to the desired position and desired heading angle.
Step 1
For the purpose of simplifying the subsequent point stabilization control algorithm design process, we can design the origin of the inertial frame

Step 2
Designing the following new intermediate state variables

Then the kinematic and dynamic equations of the underactuated UMV with model asymmetry, expressed in system (3), can be transformed into system (5) as follows

Step 3
Aiming to further optimize the form of system (5), here we again design the following new intermediate state variables

Differentiating both sides of the first three equations in (6) leads to

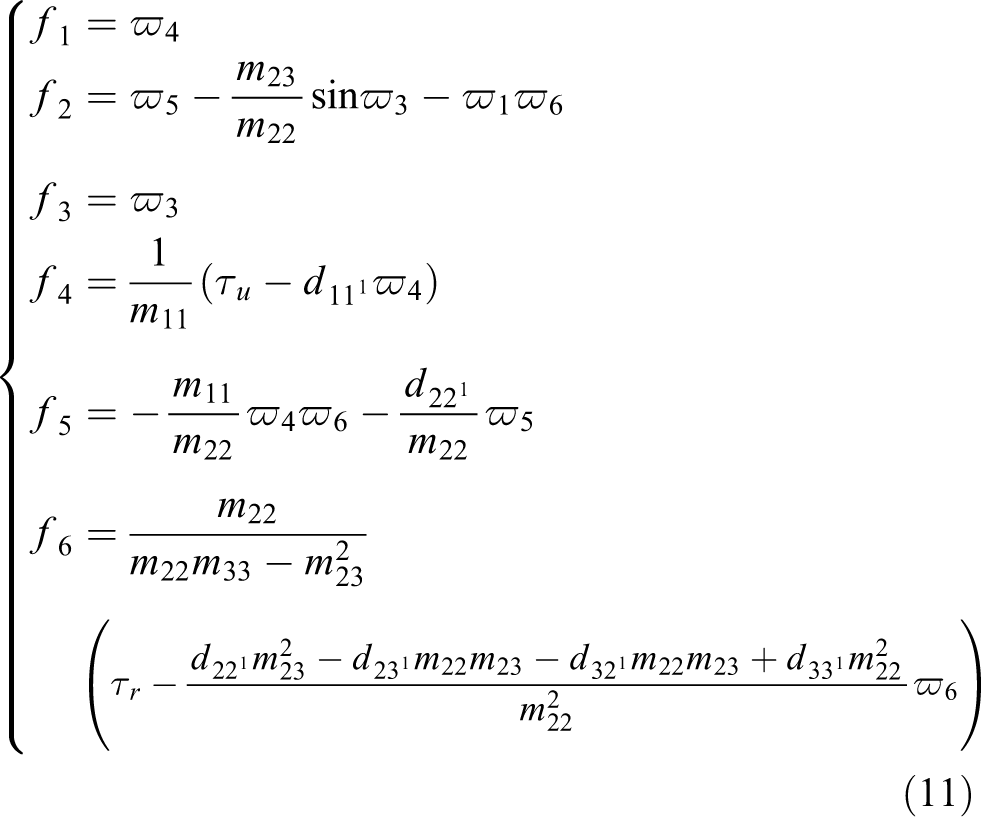
Then comprehensive consideration of (2), (5), (6), and (7), the kinematic and dynamic equations of the underactuated UMV with model asymmetry, can be further transformed into system (8) as follows

What should be mentioned here is that we only analyze the equations with second-order term of damping coefficients as a representative case, and that with third-order or more higher order term of damping coefficients could be analyzed similarly, so the controller design for the higher order cases would not be repeated in this article.
Step 4
Designing the following state vectors

and

where
and

Finally, the kinematic and dynamic equations of the underactuated UMV can be transformed into system (13) as follows

Controller design
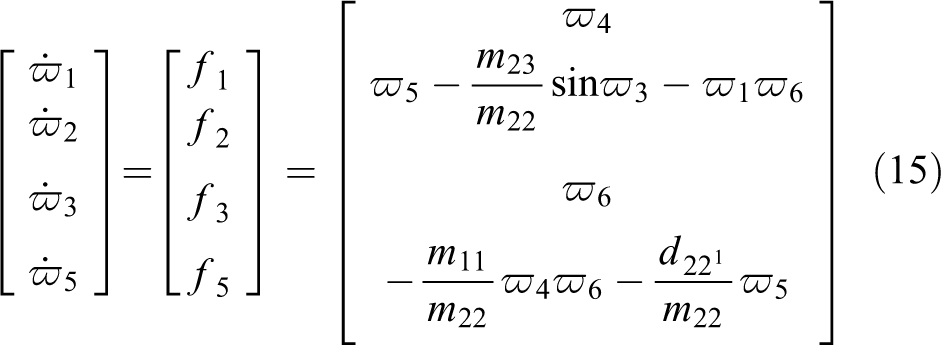
Taking out the subsystem (14) shown below from system (13)

and system (14) can be decomposed into the following two subsystems (15) and (16)
and

Firstly, seeing from subsystem (15) below

Based on the virtual design idea of nonlinear backstepping technique, we can design the following control input

where k1,k2,k3,λ are all positive parameters and
Under the control of the above virtual control input in (17), subsystem (15) is transformed into (18) as follows

Secondly, analyzing subsystem (16) below

By introducing the idea of nonlinear feedback linearization, we can design the following

where k5 and k6 are both positive parameters, and under the control of the above control input in (19), subsystem (16) is transformed into (20) as follows

In the following section, we will focus on analyzing the stability of the control algorithm proposed in this section.
Stability analysis
In this section, we will prove that the control law designed in (19) could realize robust exponential stability, for the point stabilization control system of the underactuated high-speed UMV with model asymmetry, by using homogeneous stability theory and average system stability theory. The whole proof process will be carried out in three steps as follows:
Step 1
We will prove that the virtual control input
Proposition 1
Considering the system

with

is asymptotically stable. Then, there exists
Firstly, substituting the designed virtual control input (17) into system (18), we can obtain the average system of (18) as shown in (23)

Then system (23) can be divided into subsystems (24) and (25) as follows


It is easy to obtain from (24) that the state variables

Considering the following Lyapunov function candidate (27) for system (26)

Differentiating both sides of (27) based on the solutions of (26) results in

So the state variables
So the virtual control input
Step 2
In this step, we will prove that the control laws designed in (17) and (19) could make the origin of system (14) asymptotically stable. Similar to the above proof process, another stability theory is introduced here; see Proposition 2 below, which is also referenced from literature. 34
Proposition 2
Considering the following system

with

is asymptotically stable.
Under the control laws designed in (17) and (19), system (14) could be transformed into subsystems (18) and (20).
It is easy to see that system (18) and virtual control input (17) are both continuous T-periodic system function and vector function. While
As we have already shown that the origin of system (18) is asymptotically stable in step 1. Then according to Proposition 2, for positive and large enough values of k5 and k6, the origin of system (18) and (20) is asymptotically stable. As subsystems (18) and (20) are transformed from system (14) under the control laws designed in (17) and (19). Then we could see that the control laws designed in (17) and (19) could make the origin of system (14) asymptotically stable.
Step 3
In this step, we will prove that the origin of system (13) is locally exponentially stable under the control laws designed in (17) and (19). Similar to the above proof process, the homogeneous stability theory is introduced here; see Proposition 3 below, which is still referenced from literature. 34
Proposition 3
Considering the system

with

is locally exponentially stable when
Firstly, according to system (14), it is a continuous T-periodic function under the control laws designed in (17) and (19), and
In addition, system (14) is homogeneous of degree 0 with respect to the dilation
Obviously, the vector

where
It can be seen here that, if the higher order is taken in system (8), there is always a corresponding km in (33) related to the higher order. So, we only analyze system (8) with second-order term of damping coefficients as a representative case is reasonable and feasible.
Therefore, according to Proposition 3, the origin of system (13) is locally exponentially stable under the control laws designed in (17) and (19).
As all the coordinate transformations designed in this article are global differential homeomorphisms, we can make the conclusion that the control laws designed in (17) and (19) could achieve robust exponential point stabilization control for an underactuated high-speed UMV with model asymmetry.
Simulation experiment
In order to verify and illustrate the effectiveness of the robust exponential point stabilization control algorithm proposed for the underactuated high-speed UMV with model asymmetry in this article, simulation experiment is carried out with an UMV model on our semi-physical simulation platform in the laboratory, while the detail UMV model parameters are:
The initial states of the UMV are chosen as
According to the ship length Froude number

Convergence curve of position x.

Convergence curve of position y.

Convergence curve of heading angle.

Convergence curve of velocity u.

Convergence curve of velocity v.

Convergence curve of angular velocity r.

Convergence curve of control force.

Convergence curve of control moment.
Simulation experiment results in Figures 3 to 10 show that the robust exponential point stabilization control algorithm proposed in this article could well achieve the point stabilization control of the underactuated high-speed UMV with model asymmetry. The control system designed based on the proposed algorithm could quickly converge to the desired equilibrium point, and the stabilization error at the beginning is small and then it converges to zero.
Conclusion
A robust exponential point stabilization control algorithm is proposed in this article for an underactuated high-speed UMV with model asymmetry. Through three times of state global differential homeomorphism transformation designing, the point stabilization control system is reduced to a simple system, which is easier to analyze, and the problems caused by model asymmetry are solved at the same time. While the difficulties brought by the damping matrix with the higher order velocity terms in the high-speed UMV control system are overcome by introducing a novel interference function during the control design process. Virtual input design is put forward in our control algorithm from the inspiration of the backstepping technique, and combining with the average system theory, robust exponential point stabilization controller is designed, which could well achieve the point stabilization control of the underactuated high-speed UMV with model asymmetry. Stability of the point stabilization control algorithm proposed here is proved by using homogeneous stability theory and average system stability theory. In addition, simulation experiment results show the effectiveness and reliability of the controller designed. In view of the superiority and stability of the control algorithm studied in this article, we will further research the point stabilization control of the UMV under complex environment disturbance by combining the control algorithm with environment disturbance observer. Meanwhile, our research group will conduct further research on the control algorithm for trajectory tracking control of the UMV.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (NSFC) (Grant Nos. 51709214, 51779052, 51809203, 51879210), China Postdoctoral Science Foundation (Grant No. 2018M642939), Stable Supporting Fund of Science and Technology on Underwater Vehicle Laboratory (Grant No. SXJQR2018WDKT001), Open Fund of Key Laboratory of High Performance Ship Technology (Wuhan University of Technology), Ministry of Education (Grant No. gxnc18041404), and the Fundamental Research Funds for the Central Universities (Grant Nos. WUT: 2017IVA006, WUT: 2018IVB069).