
Abstract
Path following control system of an underactuated unmanned marine vehicle is an important guarantee for its successful operation, the path following control problem of an underactuated and asymmetrical unmanned marine vehicle sailing in the presence of ocean current disturbances is addressed. Asymmetry of the unmanned marine vehicle model and higher order velocity coupling terms of damping coefficients of the unmanned marine vehicle are discussed, which would improve the accuracy of the path following control system. A kind of global differential homeomorphism transformation design is proposed to solve the difficulty of nonzero term appearing in the non-diagonal elements of the system inertia coefficient matrix and damping coefficient matrix, which is caused by the model asymmetry of unmanned marine vehicle. An improved line-of-sight guidance algorithm is presented by introducing longitudinal position error and tracking error weight factor into traditional line-of-sight algorithm, which could speed up the path following process, meanwhile the method could be extended to the application of curve path following. Virtual velocity in the tangent direction of the path to be followed is designed for the control system, by increasing a virtual control input, the underactuated control system is simplified, and the higher order velocity coupling terms of damping coefficients are integrated considered in the virtual control law. Stability of the path following control algorithm proposed for unmanned marine vehicle is proved by Lyapunov theory, and some simulation experiments are carried out to verify the effectiveness of the path following control system designed.
Keywords
Introduction
Unmanned marine vehicle (UMV), usually contained unmanned/autonomous underwater vehicle (UUV/AUV) and unmanned/autonomous surface vehicle (USV/ASV), can be used to perform a multitude of different tasks, such as mineral resources sampling, offshore oil and gas operations, ocean engineering maintenance, and military reconnaissance, and it is attracting more and more interest from the scientific, commercial, and naval sectors. 1 –5 Although much advancements have been realized in this area, the demand for more advantages in navigation, guidance, and control system for UMVs continues to grow, as more and more vehicle autonomy is required. 6 –10 In practical implementation, many UMVs are designed of underactuated configurations due to practical considerations, such as reducing weight and/or cost and improving structural strength. 11 –13 Path following control system is one of the most fundamental and critical control systems during the whole operation process of UMV; after the scheduled task is determined, the UMV needs to accurately sail on the specified path according to the requirements of mission planning, and inaccurate path following may lead to task failure. 14 –18 In recent years, more and more studies have been conducted on ocean exploration by UMV, and there are many research studies on the path following control of an underactuated UMV for ocean exploration, as path following control system is one the most important control systems for an UMV. 19 –22
Accurate path following control plays an important role for UMV in the oceanic surveys and exploration, an adaptive nonlinear second-order sliding mode controller is proposed to eliminate the chattering motion through a sliding surface during the path following control by Zhang et al., 23 and David et al. proposed a novel improved proportional–integral–derivative control approach that enables variable ballast systems on an UMV to complement the underwater vehicle’s hydroplanes when altitude keeping over a variable seabed, 24 while subject to complex unknown nonlinearities including un-modeled dynamics, uncertainties, and unknown disturbances, a novel fuzzy uncertainty observer-based path following control scheme for an underactuated marine vehicle is proposed in the study by Wang et al. 25 The cooperative path following problem of multiple underactuated UMVs involves two tasks, 26 which may be used to cooperative topographic survey, and the first one is to force each UMV to converge to the desired parameterized path, while the second one is to satisfy the requirement of a cooperative behavior along the paths. A path following control scheme for deep-sea work class remotely operated vehicles subjected to disturbing forces and moments generated by parameter variations, ocean currents, umbilical cables, and other unknown disturbances is designed, 27 while based on a multi-body system concept, a model is designed based on an adaptive controller and a disturbance model is analyzed, which compensates the dynamics of a finite element tether and multi-body underwater vehicle manipulator. 28 Peng and Wang present a design method for output feedback path following control of underactuated UMV moving in a vertical plane without using surge, heave, and pitch velocities, and an extended state observer is developed to recover the unmeasured velocities as well as to estimate total uncertainty induced by internal model uncertainty and external disturbance 29 , while Jiang et al. discuss the task of both optimizing and following routes that present a ladder shape; a planning method is proposed to determine a nearly optimal coverage route is designed, and then the track spacing is optimized considering the seabed type and the sonar range for the purpose of increasing detection probability. 30 The problem of three-dimensional (3D) path following control for an underactuated UMV in the presence of parameter uncertainties and external disturbances is addressed, 31 while a teach and repeat path following method is proposed by King et al. 32 for an UMV navigating long distances in environments where external navigation aides are denied, and the method utilizes sonar images to construct a series of reference views along a path, stored as a topological map. Aiming to fuse bathymetric data from both systems for a full coverage survey with a confident map of these data, the selected model for the fusion process is derived from belief functions. 33 Extension to fuzzy subsets allows us to integrate the precision and the reliability of the source data, and the targeted estimator of the bathymetry error associated with every sounding involved in the fusion process should give an objective quality of the fused bathymetry.
By analyzing the existing research results described above, we can find that, at present, most of the research results on path following of an UMV for ocean exploration are based on fully symmetric UMV model, meanwhile the damping coefficient higher order velocity coupling terms of UMV model are not considered. 34 –38 While considering the higher accuracy requirements of the UMV’s path following control system for the ocean exploration, a novel path following control system, which considers the asymmetry and the damping coefficient higher order velocity coupling terms of the UMV model, is designed based on an improved line-of-sight (LOS) guidance algorithm for and underactuated UMV used for ocean exploration in the presence of ocean current disturbances. Compared with the existing research results on path following control algorithm of an underactuated UMV for ocean exploration, the main contributions of this article are as follows: (i) Asymmetry of the UMV model is considered, and a kind of global differential homeomorphism transformation design is proposed to solve the difficulty of nonzero term appearing in the non-diagonal elements of the system inertia coefficient matrix and damping coefficient matrix, which is caused by the model asymmetry of UMV. (ii) Higher order velocity coupling terms of damping coefficients of the UMV are discussed, which include both linear damping and nonlinear damping, and an ingenious intermediate process design is presented for dealing with the complex nonlinear terms. (iii) An improved LOS guidance algorithm for path following control of UMV is proposed, which combines with the longitudinal tracking error and lateral tracking error in the designed guidance algorithm. (iv) The virtual velocity in the tangent direction of the path to be followed is designed for the control system, which increases a virtual control input and leads to simplify the underactuated control system. (v) Path following control algorithm designed in this article could achieve both straight line path and curve path following, while some algorithm could only achieve straight line path or curve path following. (vi) Ocean current disturbance is considered in this article, and the ocean current relative coordinate system and ocean current relative velocity are designed in this article to integrate the ocean current disturbance into the kinematics equations and dynamics equations of UMV.
The remainder of the article is organized as follows. UMV modeling and the path following problem of the underactuated UMV is formulated in the “Problem formulation” section, meanwhile a kind of global differential homeomorphism transformation design is proposed. Path following control laws are presented in the “Path following controller design for an underactuated UMV” section, an improved LOS guidance algorithm is proposed and the virtual velocity in the tangent direction of the path to be followed is designed. Stability of the control laws designed for the underactuated UMV is proved by Lyapunov stability theory in the “Stability analysis of path following control algorithm” section. In the “Simulation experiments” section, some simulation experiments of path following control during ocean exploration are carried out to verify the effectiveness of the control algorithm proposed and the path control system design for UMV. In the “Discussion” section, some discussions about our research results on path following control of UMV are made. At last, in the “Conclusions” section, some main conclusions of path following control of an underactuated UMV for ocean exploration in the presence of ocean current disturbances are summarized.
Problem formulation
In this section, UMV modeling and the path following problem of the UMV are formulated, and a kind of global differential homeomorphism transformation design is proposed.
UMV modeling
As shown in Figure 1, Cartesian coordinate system

Reference coordinate systems of UMV path following, including Serret–Frenet coordinate system, inertial coordinate system and UMV body-fixed coordinate system. UMV: unmanned marine vehicle.
The point
Establishing UMV body-fixed coordinate system
According to Fossen, 39 UMV’s motion control system, usually could be divided into the horizontal motion control and vertical motion control, and those two subsystems are similar in the way. So horizontal plane control is usually considered first, then the vertical motion control could be the similar way, and then the horizontal plane path following control is discussed in this article, kinematics and dynamics equations of the underactuated UMV in the presence of constant ocean currents can be described as follows

with



where uc and vc are the ocean current velocities,
Expanding system (1) above leads to the UMV’s kinematics equations (2) and dynamics equations (3)


Global differential homeomorphism transformation
To solve the difficulties that, nonzero term appears in the non-diagonal elements of the system inertia coefficient matrix and damping coefficient matrix, which is caused by the model asymmetry of UMV, a kind of global differential homeomorphism transformation is presented here.
Designing the following intermediate state variables

Then after state transformation design, system (2) and system (3) could be equivalently transformed into the following system (5)

UMV path following error system
From Figure 1, UMV’s path following errors could be described as follows

where
Designing the following intermediate state variables
And then after mathematical calculation and analysis, the path following errors described in equation (6) could be equivalently transformed into the following expression (8)

where
Differentiating both sides of expression (8) leads to

where s is the length of the path and
At last, the problem of path following control of an underactuated UMV in a preplanned route is transformed into the problem of designing control input of
Path following controller design for an underactuated UMV
Path following control algorithms for an underactuated UMV in a preplanned route with the disturbance of ocean current is proposed in this section, and the main process of the control algorithm design and its implementation is shown in Figure 2, where

Flow diagram of the underactuated UMV path following control algorithm design process and its implementation. UMV: unmanned marine vehicle.
Flow chart of our laboratory semi-physical simulation platform could be described as shown in Figure 3. It shows the hardware architecture of semi-physical simulation platform of UMV. Inside the dashed box is virtual simulation, while outside is physical simulation. The virtual simulation includes an Hewlett-Packard Company (HP) graphics workstation, an information center. It is used for scene simulation, hydrodynamic calculations, and the sensor simulation of sound and light vision. The information center is equipped with an 8-channel Peripheral Component Interconnect (PCI) serial port card, module Analog Data Acquisition Module (ADAM), and it is used to simulate the motion information sensors, such as Global Positioning System (GPS), Inertial Measurement Unit (IMU), inertial navigator, and data interface of propellers. It is of Windows operation system and it communicates with HP graphics workstation through Transmission Control Protocol/Internet Protocol (TCP/IP) protocol.

Flow diagram of the semi-physical simulation platform.
The monitor terminal is used to receive condition information through network and serial port protocol to monitor the working condition and record it for further data analysis. Besides the monitor, outside dashed box, they are all physical simulation sections. The physical simulation is composed of vision processing unit, planning unit, and path following control unit. The planning unit and path following control unit adopt multi-plate embedded system based on PC104, which comprises a core module integrated with a Pentium M processor, a power source that can provide DC 5 V and some interface cards for various task requirement. The physical simulation system is used for overall path programming, obstacle avoidance and motion control, and target identification.
Path following control laws design of
and
A novel look-ahead distance is designed in this article for UMV path following control system, which is different from traditional LOS guidance algorithm:

where Δ is the look-ahead distance, λ1, λ2, and λ3 are all positive designed control parameters, then the improved LOS guidance algorithm for path following could be described as follows

where

To further simplify the path following error system (9), the following new intermediate state variables could be designed

where

Analyzing the above error system (14) by the state feedback linearization method and nonlinear backstepping technique and combing with the Lyapunov theory, the following control law (15) for

where
According to the second and third equations of error system (14), and also combing with the feedback linearization method, nonlinear backstepping technique, and Lyapunov theory, the path following control law for

where
Path following control law design of
Intermediate error variable ϖ2 could converge to 0 under the path following control laws of

To simplify the system description, define the following variables

As it could be seen that

Then combing with expressions (18) and (19), equation (17) could be rewritten as follows

Analyzing the above error system (20) by the state feedback linearization method and nonlinear backstepping technique, combing with the Lyapunov theory, the virtual path following control law for

where λ4 is a positive designed control parameter.
Stability analysis of path following control algorithm
In this section, stability of the path following control algorithm would be proved, Lyapunov stability theory and LaSalle invariance principle are adopted during the whole analysis process.
Stability analysis of intermediate state variables ϖ1, ϖ2, ϖ3
Firstly, we discuss the stability and convergence of the intermediate state variables ϖ1, ϖ2, ϖ3 designed in equation (13).
Substituting the path following control laws designed in equations (15) and (16) into the new error system (14) leads to

Considering the following Lyapunov function candidate (23) for error system (22)

Differentiating both sides of the above Lyapunov function candidate (23), combing with error system (22), it is easy to obtain the following differential expression (24)
According to the above Lyapunov function candidate (23) and its differential expression (24), combing with the Lyapunov stability theory, it is easy to know that all the intermediate state variables ϖ1, ϖ2, ϖ3 would globally asymptotically converge to 0 as
Stability analysis of path following errors xe, ye
In the “Stability analysis of intermediate state variables ϖ1, ϖ2, ϖ3” section, ϖ2 converges to 0 is proved; according to the LaSalle invariance principle in Isidori, 40 the second equation of system (9) could be described as follows

Then combing with expressions (18) and (19), equation (25) could be rewritten as follows

Substituting the virtual path following control laws designed in equation (21) into the UMV path following error equations (20) and (26) results in:

Considering the following Lyapunov function candidate (28) for UMV path following error system (27):

Differentiating both sides of above Lyapunov function candidate (28), combing with error system (27), it is easy to obtain the following differential expression (29):

According to above Lyapunov function candidate (28) and its differential expression (29), combing with the Lyapunov stability theory, it is easy to know that both of the UMV path following errors xe and ye would globally and asymptotically converge to 0 as
Stability analysis of the whole UMV path following control system
As the UMV path following errors xe and ye both converge to 0, as proved in the “Stability analysis of path following errors xe, ye” section, according to expression (11), LOS guidance angle
In addition, as ϖ1 converges to 0, as proved above in the “Stability analysis of intermediate state variables ϖ1, ϖ2, ϖ3” section, then the first equation of system (13) could be rewritten as

So the longitudinal velocity u converges to the desired velocity ud is proved here.
Furthermore, as ϖ2 converges to 0, as proved in the “Stability analysis of intermediate state variables ϖ1, ϖ2, ϖ3” section, and the virtual control input
In summary, the path following control laws
Simulation experiments
To verify and illustrate the effectiveness and reliability of the path following control system designed based on the control algorithm proposed in this article, several computer simulation experiments are carried out, for an underactuated UMV in a preplanned route with the disturbance of ocean current, on the semi-physical simulation platform in our laboratory. The UMV model is adopted with the following hydrodynamic parameters as presented in Table 1.
UMV model hydrodynamic parameters.

UMV: unmanned marine vehicle.
The control parameters are designed as presented in Table 2.
UMV path following control parameters.

UMV: unmanned marine vehicle.
A series of simulation experiment cases are carried out as follows:
Case 1
The preplanned route is assuming as a straight line path:

Path following control results of an underactuated UMV in a preplanned straight line path with the disturbance of ocean current. UMV: unmanned marine vehicle.
And the detail convergence response curve of the path following errors and the actual UMV control input curve in the preplanned straight line path with the disturbance of ocean current are shown in Figure 5.

Path following errors convergence results and UMV’s actual control input of Case 1. (a) Convergence results of UMV position errors xe and ye. (b) Convergence results of UMV heading angle errors and velocity errors
Case 2
To fully demonstrate the effectiveness and reliability of the control algorithm proposed in this article, assuming that in a 2000 × 2000 m2 area which need to be surveyed, the path is preplanned, the algorithm proposed in this article is adopted to achieve the UMV path following control of the preplanned survey path, the initial state of the underactuated UMV is chosen as
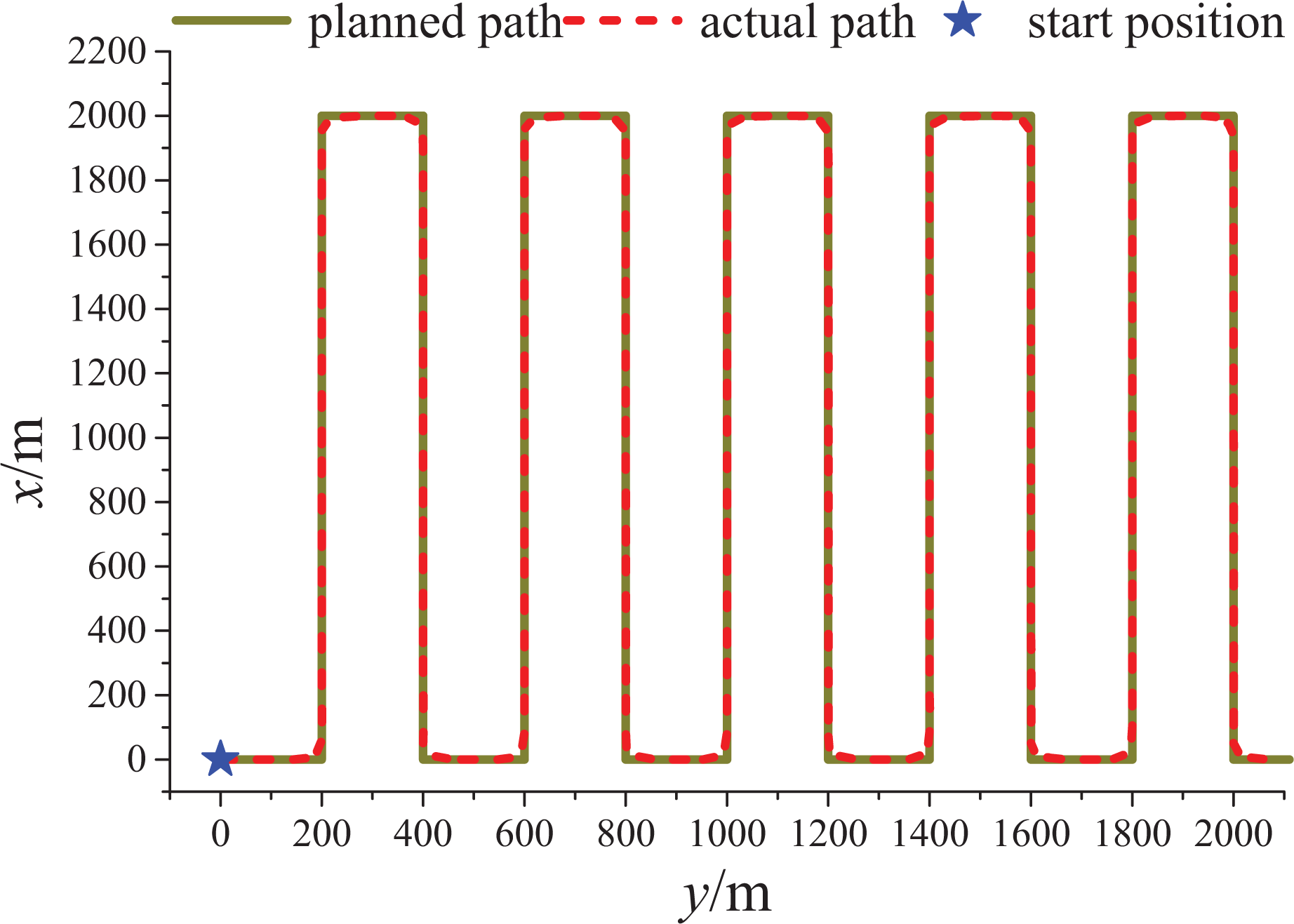
Path following control results of an underactuated UMV survey in a preplanned 2000 × 2000 m2 area with the disturbance of ocean current. UMV: unmanned marine vehicle.
Case 3
Considering some preplanned path maybe curve path during the UMV survey process, a curve path is chosen for the following as

Path following control results of an underactuated UMV survey in a preplanned curve path with the disturbance of ocean current. UMV: unmanned marine vehicle.
The detailed convergence response curve of the path following errors and the actual UMV control input curve during the survey in the preplanned curve path with the disturbance of ocean current are shown in Figure 8.

Path following error convergence results and UMV’s actual control input of Case 3. (a) Convergence results of UMV position errors xe and ye. (b) Convergence results of UMV heading angle errors and velocity errors
Case 4
To fully demonstrate the effectiveness and reliability of the control algorithm proposed in this article, assuming that in a 600 × 600 m2 area which need to be surveyed, the survey path is preplanned as three circle path as shown in Figure 8, the algorithm proposed in this article is adopted to achieve the UMV path following control of the preplanned path, the ocean current disturbance and the UMV’s initial state variables value are the same with Case 3, the detailed path following control results are shown in Figure 9.

Path following control results of an underactuated UMV survey in a preplanned 600 × 600 m2 area with the disturbance of ocean current. UMV: unmanned marine vehicle.
Discussion
Path following control problem of an underactuated UMV sailing in the presence of ocean current disturbances in a preplanned route is addressed in this article. By analyzing the existing research results described in the Introduction, we can find that, at present, most of the research results on path following of an UMV are based on fully symmetric UMV model, meanwhile the damping coefficient higher order velocity coupling terms of UMV model are not considered. While considering the higher accuracy requirements of the UMV’s path following control system, a novel path following control system, which considers the asymmetry and the damping coefficient higher order velocity coupling terms of the UMV model, is designed in this article based on an improved LOS guidance algorithm for and underactuated UMV in the presence of ocean current disturbances.
Simulation results are shown in Figures 3 to 8, which all verified the effectiveness and reliability of the path following control system designed for an underactuated UMV survey in a preplanned route with the disturbance of constant ocean current. And results in Figures 3 and 6 show that, the control algorithm proposed in this article is better than that of reference, 41 as UMV model’s asymmetry and the damping coefficient higher order velocity coupling terms of UMV model are both not considered in Liao and Zhang. 41 It demonstrates that the UMV model’s asymmetry and the damping coefficient higher order velocity coupling terms of UMV model could affect the control precision of the UMV control system, so they should be considered during the accuracy UMV ocean exploration and survey.
An improved LOS guidance law is proposed, by combing with the longitudinal path following error and lateral path following error, the tracking errors converge faster than traditional LOS method as the control parameters designed could speed up the convergence of the path following control system. In addition, as both longitudinal path following error and lateral path following error are integrated in the LOS guidance law, it means the guidance angle could change with the path following errors quickly, and this leads to that, the improved LOS guidance algorithm could achieve both straight line path following control and curve path following control, while traditional LOS algorithm could only achieve straight line path following control.
Virtual control input design for
Future research will be focused on path following control of the underactuated UMV in the presence of random environment disturbances and UMV model uncertainty.
Conclusions
Path following control problem of an underactuated UMV sailing in a preplanned route with the disturbance of ocean current is discussed, an improved LOS guidance algorithm is proposed by integrating both longitudinal path following error and lateral path following error into the guidance angle. Asymmetry of the UMV model is considered and a kind of global differential homeomorphism transformation design is proposed to solve the difficulty of nonzero term appearing in the non-diagonal elements of the system inertia coefficient matrix and damping coefficient matrix, which is caused by the model asymmetry of UMV. Higher order velocity coupling terms of damping coefficients of the UMV are discussed, which include both linear damping and nonlinear damping, an ingenious intermediate process design is presented for dealing with the complex nonlinear terms. Virtual velocity in the tangent direction of the path to be followed is designed for the control system, which increases a virtual control input and leads to simplify the underactuated control system. Path following control algorithm designed in this article could achieve both straight line path and curve path following, while some algorithm could only achieve straight line path or curve path following. Ocean current disturbance is considered in this article, and the ocean current relative coordinate system and ocean current relative velocity are designed in this article to integrate the ocean current disturbance into the kinematics equations and dynamics equations of UMV. Stability of the proposed path following control algorithm is proved by Lyapunov theory and LaSalle invariant principle, and a series of simulation experiments are carried out on the semi-physical simulation platform in our laboratory, which demonstrates the effectiveness and superiority of control algorithm designed. While path following control of the underactuated UMV in the presence of random environment disturbances and UMV model uncertainty will be studied in the near future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Pre-research of Equipment Project (41412030201), the National Natural Science Foundation of China (51779057, 51509054, 51709061, 51709214), the Innovation Special Zone of National Defense Science and Technology.