
Abstract
Based on an integral backstepping approach, a trajectory-tracking control algorithm is proposed for an underactuated unmanned marine vehicle (UMV) sailing in the presence of ocean-current disturbance. Taking into consideration the UMV model's fore/aft asymmetry, a nonlinear three-degree-of-freedom (3DOF) underactuated dynamic model is established for the horizontal plane. First, trajectory-tracking differences between controllers designed based on symmetric and asymmetric models of the UMV are discussed. In order to explicitly study the effect of ocean-current interference on the trajectory-tracking controller, the ocean current is integrated into the kinematic and dynamic models of the UMV. Detailed descriptions of distinct trajectory-tracking control performances in the presence of different ocean-current velocities and direction angles are presented. The well-known persistent exciting (PE) condition is completely released in the designed trajectory-tracking controller. A mild integral item of trajectory tracking error is merged into the control law, and global stability analysis of the UMV system is carried out using Lyapunov theory and Barbalat's Lemma. Simulation experiments in the semi-physical simulation platform are implemented to confirm the effectiveness and superiority of the excogitated control algorithm.
Keywords
Introduction
For many years, the scientific, commercial, and naval sectors have shown considerable interest in the design and development of unmanned marine vehicles (UMVs), which can be used to perform a multitude of different tasks, such as mineral resources sampling, offshore oil and gas operations, ocean engineering maintenance, and military reconnaissance [1–4]. As described in [5], UMV is usually used as a generic term to describe unmanned/autonomous underwater vehicles (UUV/AUV) and unmanned/uninhabited surface vessels (USV). Although many advancements have been realized in this area, the demand for more advanced navigation, guidance and control (NGC) systems for UMVs continues to grow, as more and more vehicle autonomy is required.
A UMV is generally underactuated, as the number of control inputs is less than the degrees of freedom, and there is a nonintegrable acceleration constraint in the UMV system. In addition, underactuated UMVs' kinematic and dynamic models are highly nonlinear and coupled; therefore, classic linear methodologies cannot be applied. A typical and active research topic on UMV motion control is trajectory tracking, which is concerned with the design of control laws that force an UMV to reach and follow a time-parameterized reference trajectory. Note that when moving in the horizontal plane, AUVs present similar dynamic behaviour to USVs. Towards general research results, this paper addresses trajectory-tracking control of UMVs in the horizontal plane. In recent years, various nonlinear control approaches for trajectory-tracking control of UMVs have been proposed, such as sliding-mode control, backstepping techniques, neural network control, hybrid control, and the linear algebra methodology. These typical methods are not only used in marine vehicle control systems, but also widely in aerial vehicle control systems, ground vehicle control systems, and other complex nonlinear control systems [6–9].
Several nonlinear sliding-mode approaches are proposed in [10–12] for trajectory-tracking control of an underactuated USV. A robust sliding-mode controller and a second sliding-mode controller are separately proposed in [13] and [14] for trajectory-tracking control of an AUV. The controller in [14] comprises an equivalent controller and a switching controller, where the switching controller compensates for the uncertainties of the vehicle's hydrodynamic and hydrostatic parameters. Backstepping techniques are utilized in [15–20] to design trajectory-tracking controllers for UMVs. An observer is constructed to provide an estimation of unknown disturbances in [18]. Some neural network controllers for trajectory-tracking control of an UMV are devised in [21–23]. In order to achieve optimal tracking performance, a reinforcement learning scheme is designed in [23] with two neural networks: one compensates for model uncertainties, and the other estimates the evaluation function.
In addition, a variety of hybrid controllers are excogitated in [24–33] for trajectory-tracking control of UMVs. An adaptive supervisory control algorithm that combines a switching method with an iterative Lyapunov technique is proposed in [24]; a stable adaptive neural network controller combined with a backstepping technique and Lyapunov theory is designed in [25]; a state feedback adaptive backstepping fuzzy logic controller is addressed in [27]; a hybrid sliding-mode control strategy based on a bio-inspired model is developed in [24]; a suboptimal robust control methodology is presented in [30]; and a hybrid control algorithm based on neural network and dynamic surface control is presented in both [28] and [33]. Moreover, some linear algebra and other methodologies are formulated in [34–42]. Based on searching for conditions under which a system of linear equations has an exact solution, linear algebra methodologies are proposed in both [34] and [35]. A global k-exponential convergence tracking controller is designed in [37]; an output feedback controller combined with a state feedback controller and a reduced-order observer is presented in [39]; a novel finite-time switching trajectory-tracking controller is developed in [41]; and a nonlinear predictive control technique is proposed in [42] for trajectory-tracking control of an USV with state and input constraints.
However, much of the early work in this area was related to developing trajectory-tracking controllers for an UMV with both port/starboard and fore/aft symmetry [10–14, 17, 19–21, 24, 26, 28, 31, 34, 36, 41], as most UMV models adopt the simplifying assumption of diagonal damping and inertia matrices. Ship hydrodynamic analysis shows that, under the assumption of a UMV with both port/starboard and fore/aft symmetry, all off-diagonal elements of the UMV's damping and inertia matrices are zero. In this case, the trajectory-tracking controller design would be more convenient, and this is one of the main reasons for the assumption. In fact, most UMVs do have port/starboard symmetry, but they do not have symmetry fore/ after; models will therefore include off-diagonal matrix elements. Nonzero off-diagonal elements of the damping and inertia matrices could lead to difficulties in system analysis and trajectory-tracking controller design. A trajectory-tracking controller is not hard to devise for a fully actuated UMV, but this is not true for an underactuated case. Though many trajectory-tracking controllers have been excogitated in different papers for underactuated UMVs, few studies have taken into consideration the asymmetry fore/aft of the UMV model. Some exceptions are [15, 17, 22, 23, 25, 37, 42], but these studies do not present any details about the trajectory-tracking differences between the symmetric and asymmetric model of the UMV. Meanwhile, as we can see from [2], ocean current is one of the most important environmental disturbances for an UMV working in the infinitely vast ocean; however, few studies have explicitly addressed ocean current in controller design, and no detailed descriptions of distinct trajectory-tracking control performances in the presence of different ocean-current velocities and direction angles have been presented. The well-known persistent exciting (PE) condition is required in [13, 17–19, 22, 24, 28, 38, 41], though the methods proposed in [11, 37] only need a mild PE condition; complete elimination of the PE condition is still difficult in trajectory-tracking control of an underactuated UMV. In the papers [25, 39, 40], the trajectory-tracking problem is decomposed into several sub-problems, separately considering course control and position control; this could lead to loss of the global stability of the overall system, meaning the system would only be stable under certain conditions.
Here, motivated by the above considerations, a trajectory-tracking controller based on a nonlinear backstepping technique is proposed for an UMV with asymmetry fore/ aft, sailing in the horizontal plane in the presence of ocean currents. In order to study the distinct trajectory-tracking control performances in the presence of different ocean-current speeds and directions, in contrast to [43, 44], a frequently used simplification that assumes the ocean current is irrotational and constant in an inertial coordinate system is adopted in this paper, as in [2, 45–47]. In the context of the existing research results on trajectory-tracking controllers designed for UMVs, the main contributions of this paper are as follows: (i) a UMV without symmetry fore/aft is considered, and the trajectory-tracking differences between the symmetric model and the asymmetric model of the UMV are discussed; (ii) detailed descriptions of distinct trajectory-tracking control performances in the presence of different ocean-current speeds and directions are provided; (iii) a novel and ingenious coordinate transformation is achieved in the paper, which simplifies the trajectory-tracking system and overcomes the difficulties brought about by model asymmetry; (iv) a mild but effective integral term of the tracking error is introduced into the trajectory-tracking controller, which enhances the convergence and convergence rate of the control system; (v) the well-known PE condition is completely released in the proposed trajectory-tracking control algorithm; (vi) a new backstepping technique-based control algorithm is proposed for trajectory-tracking control of an underactuated UMV sailing in the presence of ocean currents.
Simulation experiments are carried out to verify the efficacy of the contributions and to evaluate the control performance of the designed trajectory-tracking controller.
The remainder of the paper is organized as follows. An underactuated UMV model without symmetry fore/aft is established in section 2, and the trajectory-tracking control problem is formulated. In section 3, a novel tracking controller is designed based on an integral backstepping approach, and the asymptotic stability of the closed-loop system is proven using Lyapunov theory and Barbalat's Lemma. Simulation experiments are carried out on an UMV in a semi-physical simulation platform in section 4, and conclusions are given in section 5.
Problem Formulation
In this section, the trajectory-tracking control problem of an underactuated UMV sailing in the horizontal plane in the presence of ocean currents is formulated. The kinematic and dynamic equations of the UMV without symmetry fore/aft are presented in section 2.1, while the trajectory-tracking control problem statement for the underactuated UMV is provided in section 2.2.
UMV Modelling
An underactuated UMV without symmetry fore/aft is considered here, assuming that the ocean current is irrotational and constant. The state of the UMV is given by the vector

Inertial reference frame and body-fixed reference
x and y are Cartesian coordinates of the vehicle's mass centre in {I}, and φ denotes the yaw angle or heading angle of the vehicle. The vector

where u c and v c denote the surge and sway velocity of the current in {b}, u r is the relative surge velocity, and v r is the relative sway velocity. The current velocity in {b} can be described as follows:

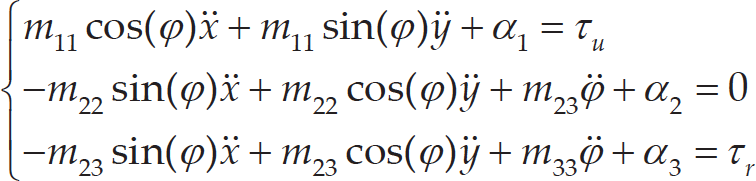
According to [48], the kinematic and dynamic equations of the asymmetric underactuated UMV sailing in the horizontal plane can be expressed as:

with

Flow diagram of the control system design process and its implementation

and

with

where τ
u
and τ
r
are the surge force and yaw moment, m11, m22, m33, m23, and m32 are the UMV's inertia coefficients, including added mass effects and m23=m32, and d11, d22, d33, d23, and d32 are hydrodynamic damping coefficients. For an UMV with both port/starboard and fore/aft symmetry, all off-diagonal elements of the damping and inertia matrices are zero, which means
The general trajectory-tracking control problem of an underactuated UMV considered in this paper can be formulated as follows:
Consider an arbitrary trajectory expressed in {I} with desired state

Define the tracking errors as follows:

Thus, the control objective for trajectory tracking of the UMV is to design control laws τ
u
and τ
r
to ensure the tracking errors
A trajectory-tracking control law for an underactuated UMV is presented in this section. The main process of the controller design and its implementation is shown in Figure 2.
Coordinate transformation
In order to solve the difficulties brought about by model asymmetry, coordinate transformation needs to make the kinematic and dynamic equations of the UMV easier, and simplify the trajectory-tracking error system.
Step 1:
Expression (3) can be rewritten as:

Differentiating both sides of (7) results in:

Note that:

Expression (4) can be rewritten as:

Substituting (10) into (8) yields:

and (11) can be equivalent to:

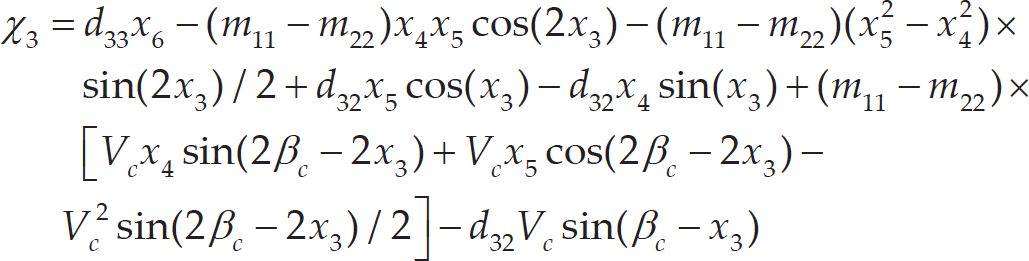
Expanding (12) makes for:
where:

Step 2:
Design the following new variables:

Follow the control input transformation as follows:

where:


The kinematic and dynamic equations of the UMV, expressions (3) and (4), can be transformed into:

Step 3:
The desired trajectory in (5) can be transformed into the following form in the same way:

From (16) and (17), new tracking errors can be designed as follows:

Differentiating both sides of (18) leads to:

where:


Step 1:
Motivated by [15–20, 49–51], the following virtual error can be designed:

where k1 is a positive constant. Differentiating both sides of (20) results in:

where:

In order to improve the convergence rate of the tracking errors, the following new variables can be designed:
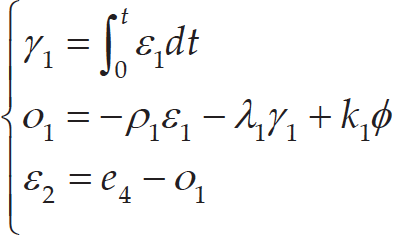
where ρ1 and λ1 are positive constants, and expression (21) leads to:

Differentiating both sides of the third expression of (22) results in:

where:

















Step 2:
As in step 1, the following variables can be designed:


where k2, ρ2 and λ2 are all positive constants.
Differentiating both sides of (25) results in:
Differentiating both sides of the third expression of (26) leads to:

where:



Step 3:
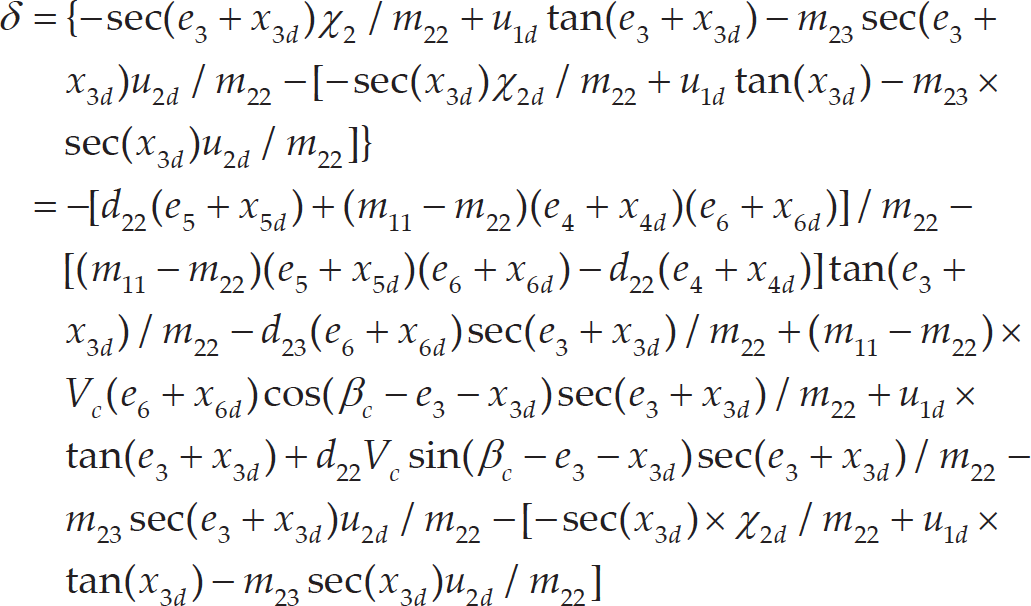
From expressions (24) and (28), the controls τ1 and τ2 can be designed as follows:

where ρ3 and ρ4 are both positive constants. Then, the actual control inputs τ u and τ r can be obtained as follows:

Theorem 3.1 The control inputs τ
u
and τ
r
given in (30) can achieve trajectory tracking of an arbitrary reference trajectory for the USV with the dynamics given in (3) and (4). In particular, for any initial conditions
Proof:
Theorem 3.1 can be proven in three steps. The first step is to prove that the closed-loop system consisting of (23), (24), (27), and (28) shows asymptotic stabilization under the control inputs τ1 and τ2 in (29). In the second step, the tracking errors e
i
, i = 1, …, 6 described in (18) can be proven to converge to zero as t → ∞. Finally, the trajectory-tracking errors
Step 1:
Substituting (29) into (24) and (28), combining (22), (23), (26), and (27) gives:

Considering the following Lyapunov function candidate:

Differentiating both sides of (32) based on the solutions of (31) results in:

Variables γ1, γ2, ɛ1, ɛ2, ɛ3, ɛ4 are all bounded because expression (33) implies that V(t) < V(0), and then

Because ɛ1, ɛ2, ɛ3, ɛ4 and
Step 2:
This step aims to prove that the tracking errors e i , i = 1, …, 6 described in (18) converge to zero. As ɛ1 converges to zero and k1 is just an arbitrarily positive parameter, equation (20) implies that:

Similarly, equation (25) implies that:

equations (22) and (26) imply that:

equations (19), (21), (35), (36) and (37) imply that:

This proves that the tracking errors e i , i = 1, …,6 described in (18) converge to zero.
Step 3:
This step aims to prove that the control laws τ
u
and τ
r
in (30) can have tracking errors

and then
So, e
i
, i = 3, 4, 5, 6 converge to zero, implying that φ,
In order to verify and illustrate the effectiveness of the trajectory-tracking control schemes proposed for the underactuated UMV, several computer simulation experiments are carried out on a UMV model with hydrodynamic parameters: m11 = 47.5, m22 = 94.1, m33 = 13.6, m23 = 5.2, m32 = 5.2 d11 = 13.5, d22 = 50.2, d33 = 27.2, d23 = 41.4, and d32 = 17.3. The initial position and heading angle of the UMV is chosen as: x(0) = 10m, y(0)= −10m, and φ(0) = 0rad, with initial velocities u(0)=v(0)=r(0)=0. The velocity of the constant ocean current is chosen as V c = 1m/s and the direction angle is chosen as β c =30. The reference velocities are chosen as u d (t) = 3m/s and r d (t)=0.05rad/s with the initial desired state variables x d (0) = y d (0) = φ d (0) = v d (0) = 0.
Parameters of the trajectory-tracking controller designed above are chosen as: k1 = 10, k2 = 5, λ1 = 0.5, λ2 = 0.2, ρ1 = 1.5, ρ2 = 3, ρ3 = 2, and ρ4 = 1. The criteria used to select the parameters are based on the following procedure: (1) parameters ρ1, ρ2, ρ3, and ρ4 are selected to tune the convergence rate of variables ɛ1, ɛ3, ɛ2, and ɛ4 to zero, respectively; (2) parameters λ1 and λ2 are chosen to adjust the performance of the integral action of ɛ1 and ɛ3 in order to enhance the convergence rate of ɛ1 and ɛ3; (3) parameters k1 and k2 are used to regulate the convergence to zero of variables e1 and e3, and then variables e2, e4, e5, and e6 converge to zero accordingly.
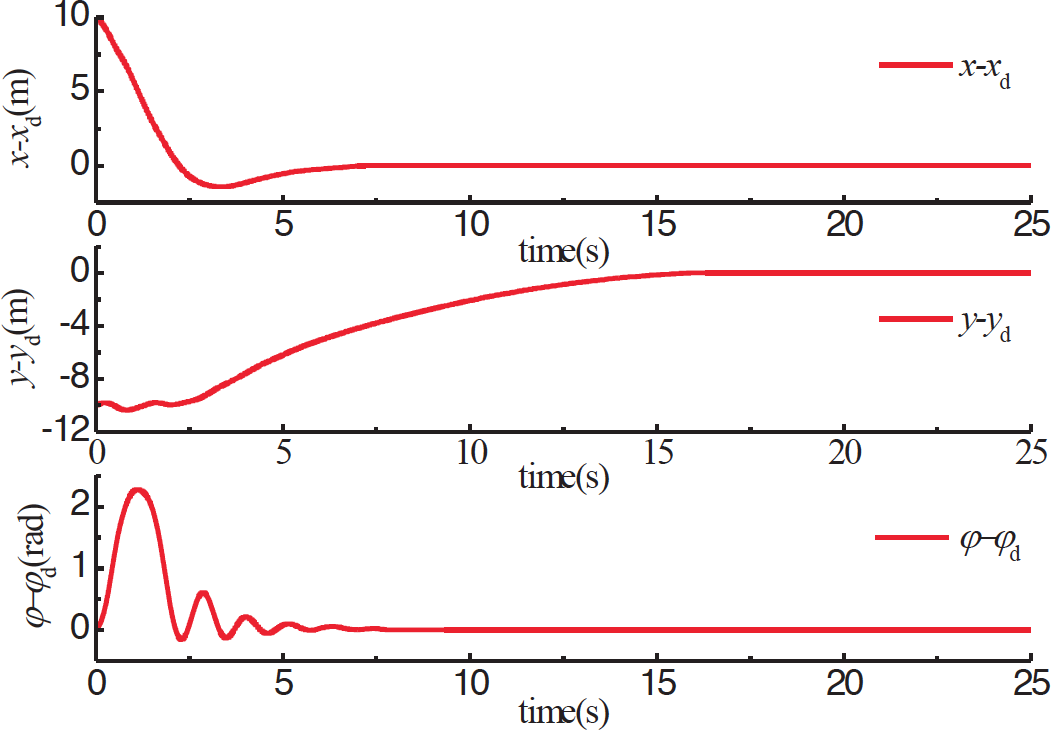
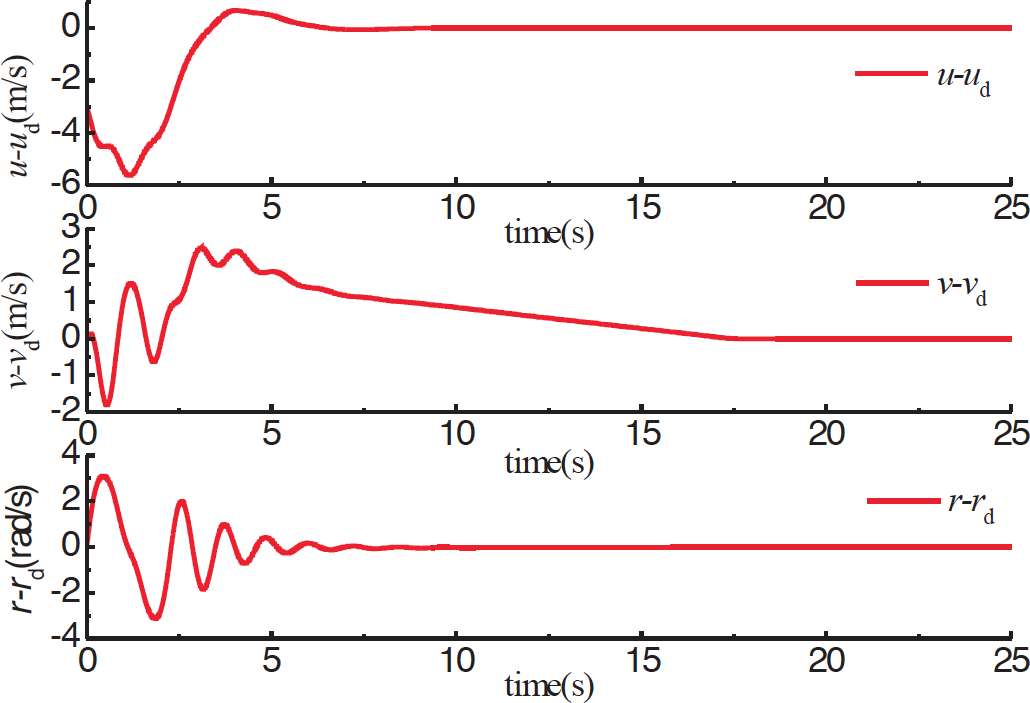
Case 1: In this case, the underactuated UMV model without symmetry fore/aft is taken into consideration, and the simulation results are shown below in Figs. 3–6. In Fig. 6, as the initial heading angle of the UMV φ(0) and the initial desired heading angle φ d (0) are both 0, the desired trajectory of the manoeuvring of the UMV is a curve; the ocean-current disturbance in the direction of surge and sway velocity will change with the heading angle, and therefore the control input is oscillated. However, as the UMV's actual state gradually converges to the desired state, the control input gradually converges to a stable value.

Trajectory-tracking results of Case 1
Case 2: For a more detailed analysis and discussion of the trajectory-tracking differences between the controller based on the symmetric model and that based on the asymmetric model, a simulation experiment with a controller designed based on the symmetric model is carried out in Case 2. The simulation results are shown below in Fig. 7. The symmetric-model-based controller is designed the same way as the asymmetric-model-based controller, as presented in this paper; only, the off-diagonal elements of the damping and inertia matrices m23, m32, d 23 , d 32 are all treated as zero during the design process of the former.
Tracking errors of position and yaw angle of UMV
Tracking errors of linear and angle velocities of UMV

Actual control input of UMV
Case 3: In order to provide a detailed description of the distinct implications of different ocean-current velocities for trajectory-tracking control of the underactuated UMV, two other ocean-current velocities, V c = 0.5m/s and V c = 1.5m / s, are chosen for simulation experiments with the direction angle β c = 30; the initial state and desired state of the UMV are the same as in Case 1. As the velocities of ocean currents in most areas are less than 1.5 m/s [53], no velocities greater than this are chosen. The simulation results of different ocean-current velocities are shown in Fig. 8 below:
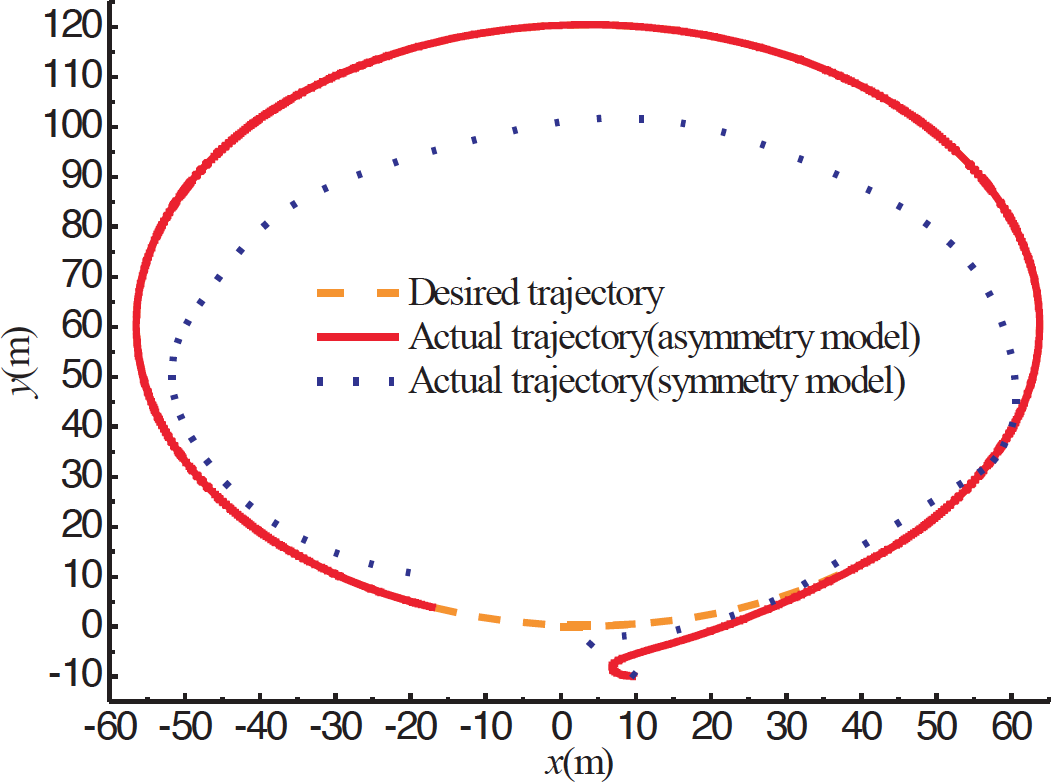
Trajectory-tracking results of Case 2

Trajectory-tracking results of Case 3
Case 4: With the purpose of providing a detailed description of the distinct implications of different ocean-current direction angles for trajectory-tracking control of the underactuated UMV, two other ocean current-direction angles, β c = 45 and β c = 60, are chosen for simulation experiments, with the velocities both chosen as V c = 1m/s; the initial state and desired state of the UMV are the same as in Case 1. As the tracking results of the angles β c = −30, β c = −45, and β c = −60 are almost similar, and the results of β c ∈ (−90, 90) are similar to those of β c ∈ (90, 270), no more direction angles are chosen. The simulation results for different ocean-current direction angles are shown in Fig. 9 below.
Case 5: To verify that the well-known PE condition is completely released in the designed trajectory-tracking controller, a desired straight-line trajectory is selected for simulation. The initial position of the UMV is chosen as x(0) = 3m, y(0) = 4m, and u d (t) = 3m/s and r d (t) = 0 are chosen in order to produce the desired straight-line trajectory. The initial state and desired state of the UMV are the same as in Case 1. The simulation results are shown below in Figs. 10–13.
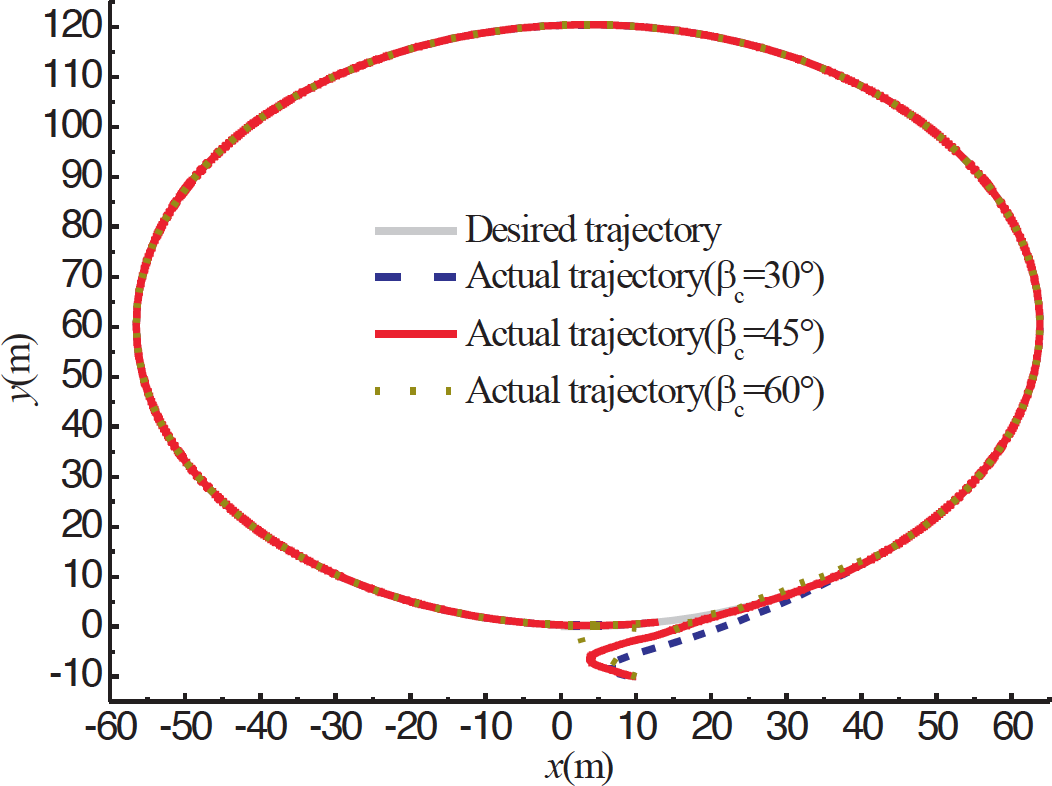
Trajectory-tracking results of Case 4
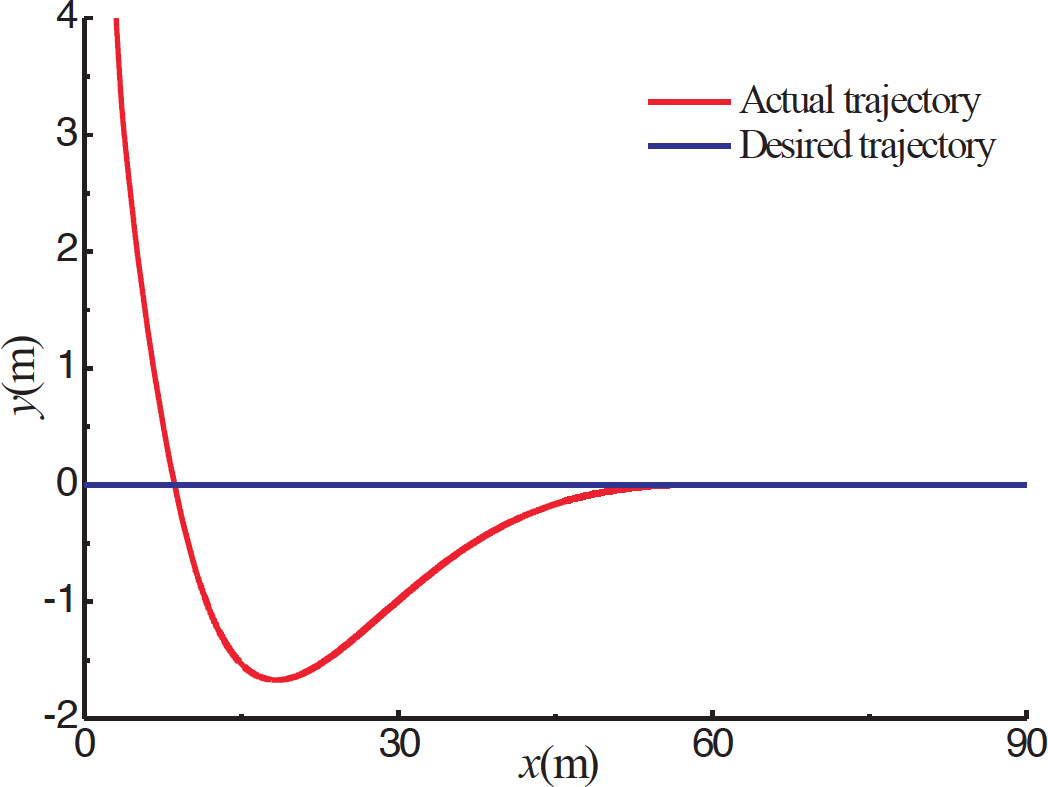
Trajectory-tracking results of Case 5

Tracking errors of position and yaw angle of the UMV
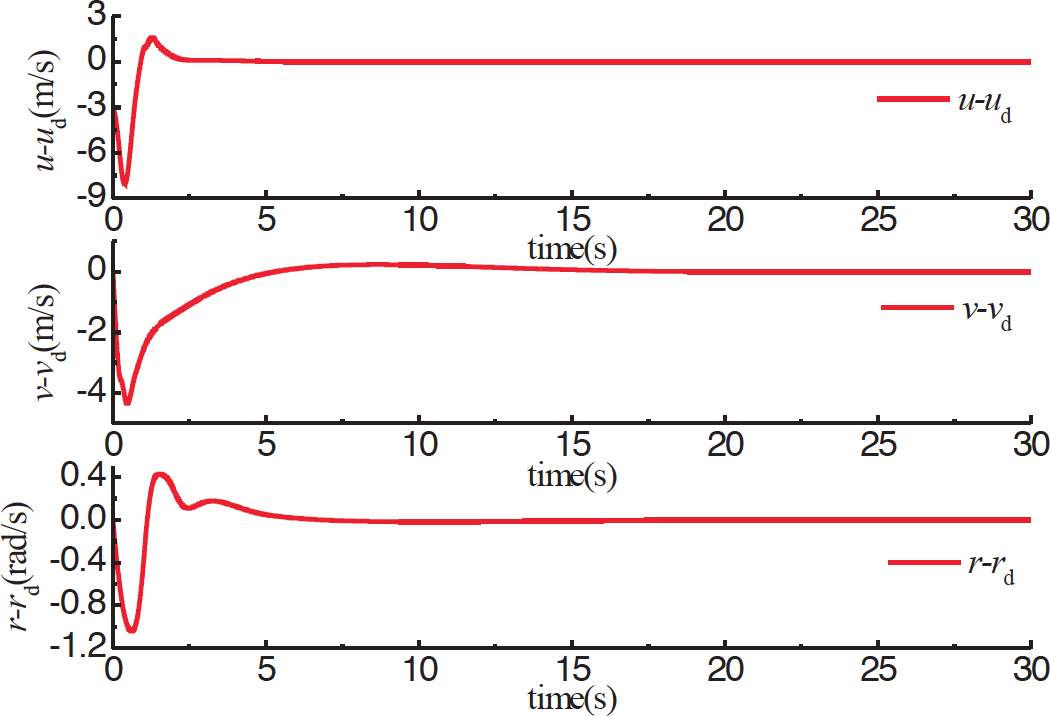
Tracking errors of linear and angle velocities of the UMV

Actual control input of the UMV
A series of simulation experiments were carried out to demonstrate the presented theorem and verify the effectiveness and superiority of the control algorithm proposed in this paper. The simulation results shown in Figs. 3 and 10 indicate that the well-known PE condition is completely released in the proposed trajectory-tracking control algorithm, and both curved and straight-line trajectories can be tracked. In addition, the results shown in Figs. 4–6 and 11–13 show that all the state variables converge to the desired stable value, and the control input convergence to a stable nonzero value compensates for the effects of the ocean currents on the UMV.
The simulation results shown in Fig. 7 show that design of the trajectory-tracking controller without consideration of asymmetry fore/aft of the UMV model will lead to obvious tracking errors; asymmetry fore/aft of the UMV model therefore needs to be taken into consideration for precise trajectory-tracking control. Moreover, from the results shown in Figs. 8 and 9, it is obvious that the trajectory-tracking controller designed in this paper is robust to both the velocity and the direction angle of the ocean current; faint distinct effects of different velocities and direction angles are shown. Furthermore, the results in Figs. 8 and 9 suggest that the integral backstepping-based control approach may be suitable for trajectory-tracking control of the UMV in the presence of unsteady ocean currents. This can be taken as an indication of profitable future research directions.
Based on an asymmetrical vehicle model, a nonlinear integral backstepping algorithm has been proposed for trajectory-tracking control of an underactuated UMV sailing in the presence of irrotational and constant currents. A mild but effective integral term of the tracking error is introduced into the controller to improve the asymptotic stability of the trajectory-tracking control system. The well-known PE condition is completely released in the presented control algorithm, and both curved and straight-line trajectories can be tracked with the designed trajectory-tracking controller. Asymmetry fore/aft of the UMV model needs to be taken into consideration for precise trajectory-tracking control, as considerable differences in tracking control performance are revealed between the controller based on a symmetric model and that based on an asymmetric model. This has been discussed in an original way in this paper. The designed trajectory-tracking controller is robust to both velocity and direction angle of ocean current; faint distinct effects of different current velocities and direction angles on control performance are shown. Future work will focus on expanding the integral backstepping control approach for trajectory-tracking control of the UMV in the presence of unsteady ocean currents, as suggested by the analysis of the distinct control performance implications of different current velocities and direction angles. With the aid of Lyapunov theory and Barbalat's Lemma, the asymptotic stability of the UMV trajectory-tracking control system has been theoretically proven here in theory as well as demonstrated in simulation experiments with an underactuated UMV model without asymmetry fore/aft.
Footnotes
Acknowledgements
We would like to acknowledge the support of the National High Technology Research and Development Programme 863 of PR China (Nos. 2012AA09A304 and 2014AA09A509) and the National Natural Science Foundation of China (Nos. 51409054, 51409059, 51409061, 51579022, 51509057).