In this article, an adaptive fuzzy control command filtered control approach, which is capable of achieving finite-time trajectory tracking control of uncertain robotic manipulators, is proposed by using the backstepping control technique. To obtain a finite-time estimation of a virtual control input and its first-order derivative, a second-order finite-time command filter is designed. Based on the backstepping control technique, an adaptive fuzzy controller that guarantees not only that the tracking errors tend to an arbitrary small region in finite time but also that all signals in the closed-loop system keep bounded is established. Finally, the effectiveness of the proposed method is demonstrated by simulation on a two-link robotic manipulator.
Since the early 1980s, control of robotic manipulators, which is a meaningful work and has wide practical applications, has received more and more attention of engineers and scholars from various fields. The model of the robotic manipulators is highly nonlinear, highly complicated, and coupled.1–7 In the early research of robots control, the prior knowledge of the system model are needed. A lot of control methods, for example, active control, inverse-based control, backstepping control, have been proposed for robotic manipulators with accurate system model. Nevertheless, in real-world applications, robots usually encounter system uncertainties, such as, sensor errors, modeling errors, external disturbances, parameters drift, which will damage the control performance if they are not well handled ?.8–16 It is well-known that fuzzy logic system (FLS) has been well used in controlling uncertain nonlinear systems because it does not need an accurate system model, and it can take advantage of human expert knowledge. The effectiveness of adaptive fuzzy control (AFC) has been shown in much literature.17–33 To reduce the fuzzy approximation errors as well as external disturbances, AFC method was usually cooperated with some robust compensator, such as sliding mode control (SMC) and control. Recently, a lot of AFC methods have been proposed for robotic manipulators, which can be divided into two different types. In the first AFC approach, the robotic’s mathematical model was fully unknown. According to the literature,34–36 FLSs were utilized to model system dynamics. It has been indicated that this method can eliminate chattering phenomenon. However, under this method, the structure of the AFC is complicated, and the computation burden was very large. Some other AFC or adaptive neural network control methods for manipulators can be refereed to the literature.34,37–40 In another type of AFC approach, the prior knowledge of the robotic systems should be known.41,42 It should be pointed out that under this method, the stability of the controlled system is hard to be theoretically discussed.
On the other hand, the finite-time control approach, which has fast responses, high tracking accuracy, and very good robustness, has been investigated extensively in recent years.2,43–45 Initial works about finite-time control mainly focused on discontinuous dynamic systems which can deteriorate the system transient performance.43,46 To develop finite-time stability for more general actual nonlinear systems, Bhat and Bernstein47 studied finite-time control of multidimensional continuous autonomous systems. Finite-time synchronization control of a class of neural networks with time delay using feedback technique was investigated byHu et al.46 Up to now, finite-time control approach has been used in control switched systems,48 impulsive dynamical systems,49 robotic manipulators,43,46 and so on. It should be mentioned that there are only few results of finite-time control of uncertain robotic manipulators due to the fact that it is very hard to cancel the effect of the system uncertainties in the finite-time controller design, and the stability analysis of the controlled robotic system is very complicated. Thus, how to design controller for uncertain robotic manipulators guaranteeing the finite-time convergence of the tracking error is an interesting but challenging work.
Adaptive backstepping control has been a powerful technique for designing controller for strict-feedback nonlinear systems.33,50,51 However, the problems “explosion of terms” and “functions should be linear” which are hard to be solved effectively usually occur in this method. To overcome the first problem, the dynamic surface control was introduced by Swaroop et al..52 It should be mentioned that the approximation errors that produced by a first-order dynamic surface was omitted, and the control performance was decreased. For this reason, command filtered control (CFC) was proposed by Farrell and colleagues.53,54 In the CFC, the approximation errors of the command filters were handled by some compensated signals. To deal with the second problem, the CFC can be used together with the AFC. However, how to design finite-time adaptive fuzzy CFC method for dynamical systems is still an open problem.
Motivated by the above discussion, in this work, an adaptive finite-time fuzzy command filtered control (AFTFCFC) is proposed for robotic manipulators to obtain finite-time tracking. FLSs are employed to approximate the unknown nonlinear functions as well as external disturbances. A second-order command filter that can guarantee the finite-time approximation of the virtual control inputs and their derivatives in the backstepping design is proposed. Thus, the problem “explosion of terms” can be solved. To handle the approximation of the finite-time command filter, compensated signals are designed. The stability analysis is discussed using Lyapunov stability criterion. The main contribution of our work can be summarized as: (1) an AFTFCFC method that can guarantee the finite-time convergence of the tracking error to an sufficiently small region is established, and the proposed method has self-tuning ability; (2) compared with the conventional backstepping control method, the “explosion of terms” problem is solved effectively by proposing a second-order finite-time command filter; and (3) based on the theoretical derivation and the simulation results, the proposed method has good robustness.
The structure of this work is as follows. The second section gives the description of FLS and some lemmas that are valid for the subsequent stability analysis. The description of the robotic manipulators and control problem is presented in the third section. The AFTFCFC design and stability analysis is given in the fourth section. Effectiveness of the proposed method is demonstrated by simulation results in the fifth section. Conclusions are described in the final section.
Preliminaries
Description of the FLS
An FLS usually has four parts, that is, the knowledge base, the fuzzifier, the fuzzy inference engine working on fuzzy rules, and the defuzzifier, which can be expressed as55
with being the output, being the input. Denote and , where is the number of fuzzy rules and
Suppose that is a Lipschitz continuous function.56 For any and , there always exists a FLS in the form of equation (3) such that
Some useful results
To facilitate the stability analysis, we need the following results.
Lemma 2
Let satisfying with where is an open set and , . Then, one can find an open set , such that any started from will reach in finite time. Furthermore, let be the time needed to arrive at , we have
Lemma 3
For any scalars and , the finite-time stability can be guaranteed by
where is a Lyapunov function with . In addition, the settling time satisfies
Lemma 4
Consider the following Levant differentiator50,56:
with being the input signal and being design parameters. If the design parameters are given properly, after some finite time, the following results hold:
Problem description
The dynamic equation of an -link robotic manipulator is give as38–40,41
with denoting the joint position, and representing the joint velocity and acceleration vectors, standing for the positive definite inertia matrix satisfying ( are positive constants), denoting the centrifugal and Coriolis matrix, being gravity force, representing the friction vector, being the control input, and being the external disturbance. is a skew symmetric matrix, that is, , where .
Denote , and take system uncertainty into consideration, the robotic dynamic equation (10) is rearranged as
where , .
Let the smooth desired signal be . We aim to achieve the finite-time trajectory tracking, that is to say, for a given , to design proper backstepping control inputs (the virtual control input) and with adaptation laws of the fuzzy parameters such that the system variable track in some finite-time and guarantee the boundedness of all the signals in the controlled system.
AFTFCFC design and stability analysis
To proceed, define the tracking error as . Then we have
where is the virtual control to be designed, is the tracking error, and is the estimation of . In the conventional CFC for example, in, 15,54,57 in every backstepping step, an error compensation system is given to reduce the effect of the virtual control input estimation error . However, the finite-time tracking performance can not be guaranteed by using aforementioned control methods. To overcome this limitation, here we will introduce a finite-time error compensation signal as
where is also a compensation signal that will be defined in the next step, are design parameters, and the initial condition of is chosen as . To approximate the virtual control input and its derivative, let us use the following finite-time command filter50:
where . Thus, the outputs of the command filter in equation (14) can be used to approximate the the virtual control input and its derivative, that is, and . Thus, the compensated tracking error is given as
where is defined as . The virtual control input is designed as
where is a design parameter, is a constant, and is defined as . Let the Lyapunov function be
where , is generated by the finite-time command filter (equation (14)), and will be defined later. Noting that is an unknown continuous function, it can be approximated by the FLS (equation (3)) as
Let be the optimal parameter defined by
Let the optimal parameter estimation and the optimal fuzzy approximation error be
It follows from equations (18), (29), and (30) that
The adaptation law for is given as
where are design constants.
Now we can conclude the above theoretical derivation as the following theorem.
Theorem 1
Consider the robotic manipulator system (equation (10)) or its equivalent form (equation (11)). Let the virtual control input be as in equation (7). (the estimation of ) and its derivative is obtained by solving the finite-time command filter (equation (14)). The compensated tracking errors are defined in equations (13) and (26). Then, the proposed controller (equation (27)) accompanied with the adaptation law (equation (32)) guarantees not only that the tracking error tends to a small region of zero in some finite time but also the finite-time boundedness of all signals in the closed-loop system.
Substituting equation (38) into equation (35) gives
where
and
are three positive constants with . Then, equation (39) can be rearranged as
According to equation (40) and Lemma 3, if and are chosen such that , then the signal will tend to the region
in some finite time. Noting that , where , the rest task consists in to prove the finite-time boundedness of the compensated signal . Let define the following Lyapunov function:
Using equations (13) and (26), the derivative of is given as
where , , for .
From equation (14) and Lemma 4, we know that is finite-time bounded, that is, there exists a positive constant such that . Thus, we have
with , , , and . Consequently, the finite-time stability of can be guaranteed. This completes the proof.▪
Remark 1
In the proposed method, to achieve the finite-time stability, the sign function is used in the compensated signals (equations (13) and (26)), the finite-time command filter (equation (14)), the virtual control input (equation (7)), and the control input (equation (27)). Thus, the chattering phenomenon which is harmful to control performance will occur. To solve this problem, we can replace this discontinuous function by some continuous function, such as . According to Theorem 1, we know that the tracking error and the compensated tracking error will tend to a small region of the origin in some finite time. If we use the aforementioned continuous function to replace the sign function, the convergence radius will be larger.
Remark 2
In the proof of Theorem 1, we give the conclusion that . In fact, according to Lemma (4), will be zero in finite time. However, when the system is affected by bounded external noise, as stated in the literature,50,56 the signal will be finite-time bounded.
Remark 3
In this article, using the finite-time command filter (equation (14)), we need not to calculate the derivative of the virtual control input . The finite-time command filter (equation (14)) can obtain the estimation of and its first-order derivative in some finite time. The conventional CFC approach, such as in the literature, 53,54,58 has no such ability. In fact, in the cited works,53,54,58 a first-order command filter was used, which can be written as
where is a sufficiently large parameter, is the virtual control input. Thus, and are used to approximate and , respectively. From the above analysis, it is clear that by in comparison with the first-order filter (equation (45)), the proposed finite-time command filter (equation (14)) has faster convergence speed. In addition, the comparison results are also presented in the next section between the two methods.
Remark 4
It should be mentioned that many control methods can be used to control robotic manipulators, such as, proportional–integral–derivative (PID) control, SMC, control. In fact, the finite-time convergence of the tracking error can not be guaranteed by the PID control approach. In addition, it is very hard for PID controller designing when the robotic manipulators subject to dynamical uncertainties. The fast convergence of the tracking error and well robustness can be guaranteed by the SMC, where only the matched system uncertainties can be considered, that is, the SMC can not be properly used to control robotic manipulators with unmatched system uncertainties. With respect to control, the complicated Riccati equation should be well resolved. However, the proposed method ensure not only the finite-time convergence of the tracking error, but also the good ability to handle the unmatched system uncertainties in robotic manipulators.
Simulation results
To indicate the effectiveness of the proposed AFTFCFC method, simulation results will be given by controlling a 2-link robotic manipulator that is shown in Figure 1.
A two-link robot.
The details of system model (10) are given as follows
where , , , are the mass, denote the length. In the simulation, .
Define , where . The desired signal is . The design parameters are chosen as: . The initial condition is .
There are two FLSs are used in the simulation. Each FLS uses and as its inputs. For each input, let us define three Gaussian membership functions distributed on interval . Thus, we will use fuzzy rules in the simulation. The initial conditions of the FLSs are chosen randomly.
Simulation results are indicated in Figures 2
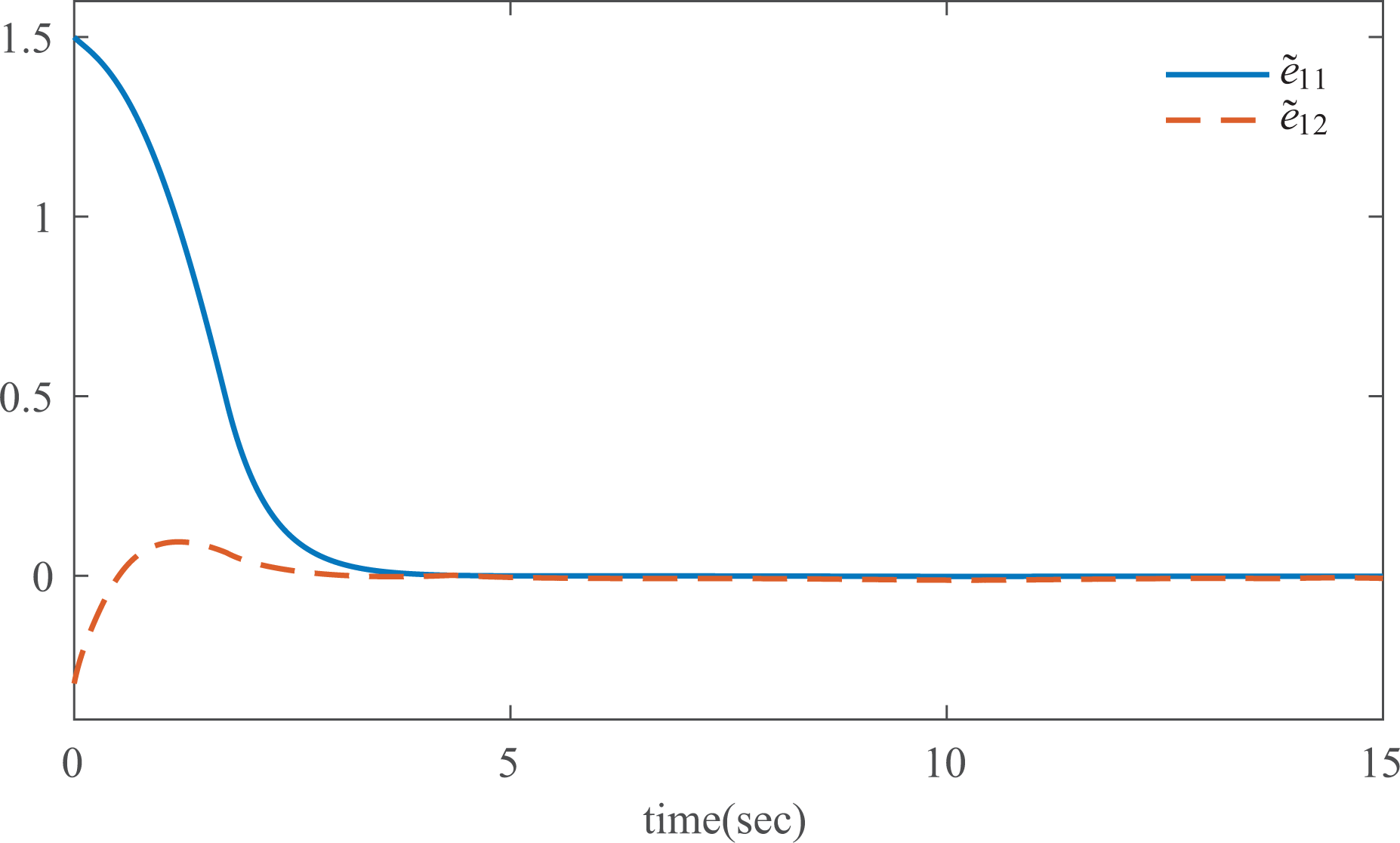
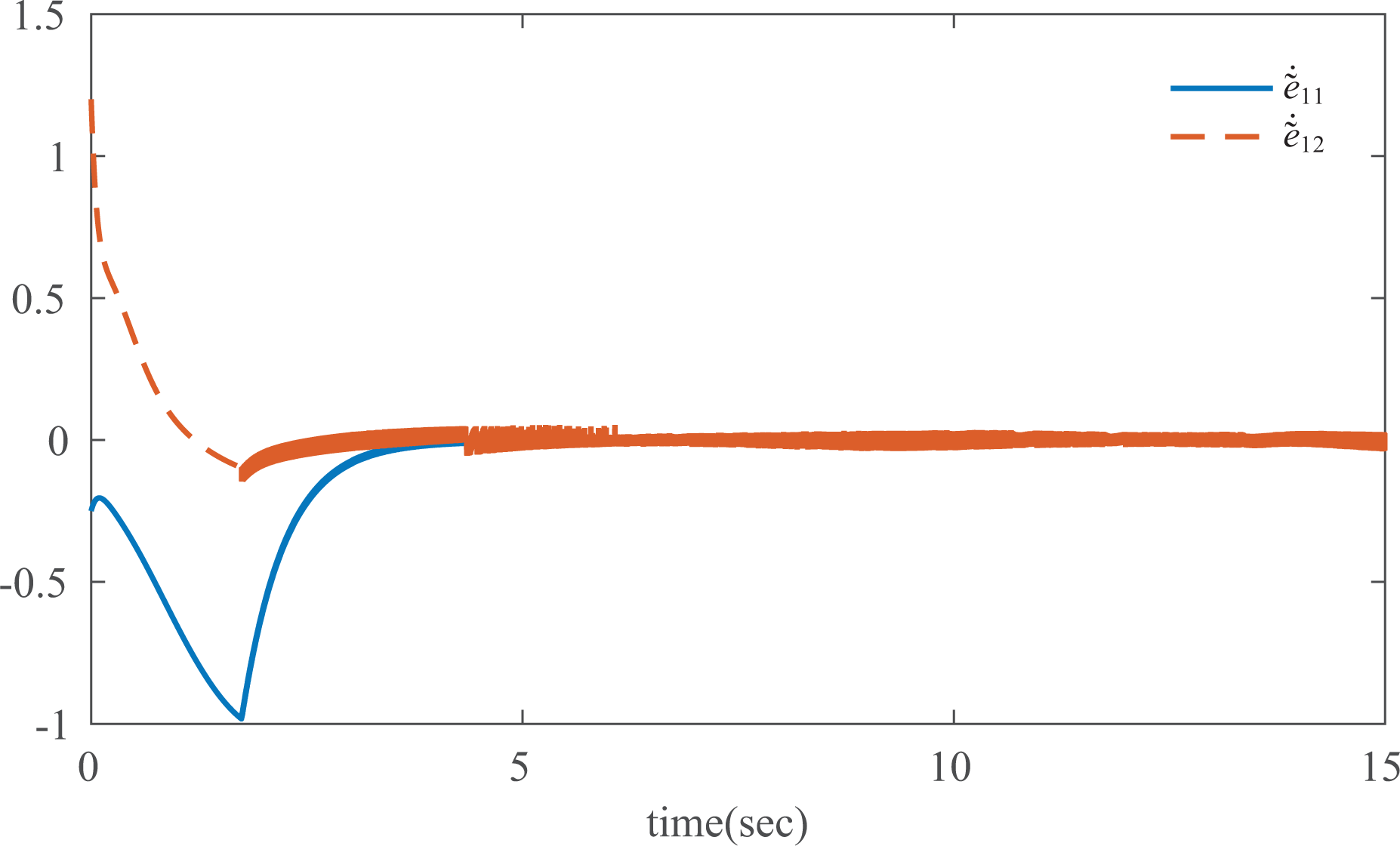
to 10. The tracking performance of joints 1 and 2 is shown in Figures 2 and 3, respectively. The tracking errors and their derivatives are given in Figures 4 and 5, respectively. It can be seen that the systems variables track the desired signal in a short time and the tracking performance is well. The control inputs are presented in Figure 6, where chattering phenomenon can be seen because the noncontinuous sign function has been used in the controller. The virtual control inputs and their estimation are presented in Figures 7 and 8. It can be seen that the proposed finite-time second-order command filter 14 has very good approximation ability and arrives and the target value in some finite time. Finally, the fuzzy parameters and are given in Figures 9 and 10, respectively.
Tracking of joint 1.
Tracking of joint 2.
and .
and .
Control inputs and .
Virtual control input and its estimation .
Virtual control input and its estimation .
Fuzzy parameter .
Fuzzy parameter .
Noting that the discontinuous function is used in the proposed AFTFCFC, just as indicated by Figures. 5 and 6, the chattering phenomenon does exist. To solve this problem, we can replace the discontinuous function in equations (13), (26), (14), (7), and (27) by , and the simulation results are presented in Figure 11.
Simulation results without chattering, in (a) compensated tracking errors; (b) control inputs; (c) virtual input and its estimation; (d) virtual input and its estimation.
On the other hand, to show the effectiveness of the proposed method, a comparison between the conventional first-order command filtered control (FOCFC) method that introduced in previous studies53,54,58 and our’s will be given. For fair comparison, to construct the conventional FOCFC, we only replace the proposed finite-time filter (equation (8)) by the first-order (equation (45)) and keep all the other parameters as same as above. The simulation results are shown in Figure 12. It can be seen that compared with the conventional FOCFC, the proposed AFTFCFC has faster convergence speed and better tracking performance.
Comparison between the conventional FOCFC and the proposed method, in (a) compensated tracking error ; (b) compensated tracking error ; (c) control input ; (d) control input ; (e) , and (f) . FOCFC: first-order command filtered control.
Conclusions
In this study, to obtain finite-time trajectory tracking control of robotic manipulators, an adaptive fuzzy command filtered control method is introduced. Unlike the backstepping control design, in our approach, the virtual control input and its derivative is estimated by a second-order finite-time command filter. It has been proven that the proposed adaptive fuzzy controller can guarantee that the states of the robotic manipulator track the desired signal in finite time. The simulation test on a two-link robotic manipulator shows the advantages of the proposed scheme: the proposed controller does not need the prior knowledge of the system and also has good robustness. Noting that the proposed approach guarantees that the tracking error tends to a small region in finite time. How to get finite-time asymptotical stability of the controlled robotic manipulators is one of our future research directions.
Footnotes
Author’s note
The data used to support the findings of this study are available from the corresponding author upon request.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author disclosed receipt of following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (11361009), the New Centaury National Hundred, Thousand and Ten Thousand Talent Project of Guangxi (GUIZHENGFA210647HAO), the High Level Innovation Teams and Distinguished Scholars in Guangxi Universities (GUIJIAOREN201642HAO) and the Guangxi Natural Science Foundation (2018JJD110003).
ORCID iD
Yanping Deng
References
1.
BobrowJEDubowskySGibsonJ. Time-optimal control of robotic manipulators along specified paths. Int J Robot Res1985; 4(3): 3–17.
2.
YuSYuXShirinzadehB. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica2005; 41(11): 1957–1964.
3.
MobayenSTchierFRagoubL. Design of an adaptive tracker for n-link rigid robotic manipulators based on super-twisting global nonlinear sliding mode control. Int J Syst Sci2017; 48(9): 1990–2002.
4.
MuscioGPierriFTrujilloMA. Coordinated control of aerial robotic manipulators: theory and experiments. IEEE T Contr Syst Trans2018; 26(4): 1406–1413.
5.
LiSShaoZXuP. Robust adaptive control for coordinated constrained multiple flexible joint manipulators with hysteresis loop. Math Probl Eng2018; 2018: 9.
6.
de Jesús RubioJ. Sliding mode control of robotic arms with deadzone. IET Control Theory Appl2016; 11(8): 1214–1221.
7.
de Jesús RubioJ. Adaptive least square control in discrete time of robotic arms. Soft Comput2015; 19(12): 3665–3676.
8.
WuH. Liouville-type theorem for a nonlinear degenerate parabolic system of inequalities. Math Notes+2018; 103(1–2): 155–163.
9.
XuRMaX. Some new retarded nonlinear volterra-fredholm type integral inequalities with maxima in two variables and their applications. J Inequal Appl2017; 2017(1): 187.
10.
PengnXShangYZhengX. Lower bounds for the blow-up time to a nonlinear viscoelastic wave equation with strong damping. Appl Math Lett2018; 76: 66–73.
11.
FengDSunMWangX. A family of conjugate gradient methods for large-scale nonlinear equations. J Inequal Appl2017; 2017(1): 236.
12.
LiFGaoQ. Blow-up of solution for a nonlinear petrovsky type equation with memory. Appl Math Comput2016; 274: 383–392.
13.
GaoLWangDWangG. Further results on exponential stability for impulsive switched nonlinear time-delay systems with delayed impulse effects. Appl Math Comput2015; 268: 186–200.
14.
PanYLiXYuH. Efficient pid tracking control of robotic manipulators driven by compliant actuators. IEEE Trans Contr Syst Trans2018; 5(99): 1–8.
15.
PanYWangHLiX. Adaptive command-filtered backstepping control of robot arms with compliant actuators. IEEE Trans Contr Syst Trans2018; 26(3): 1149–1156.
16.
Meda-CampañaJA. On the estimation and control of nonlinear systems with parametric uncertainties and noisy outputs. IEEE Access2018; 6: 31968–31973.
17.
Hernández-CortésTMeda CampañaJAPáramo CarranzaLA. A simplified output regulator for a class of takagi-sugeno fuzzy models. Math Probl Eng2015; 2015: 18.
18.
Meda-CampanaJACastillo-ToledoBZúnigaV. On the nonlinear fuzzy regulation for under-actuated systems. In: 2006 IEEE International Conference on Fuzzy Systems, 2006, Vancouver, BC, Canada, 16–21 July 2006. pp. 2195–2202. IEEE.
LiuHLiSLiG. Adaptive controller design for a class of uncertain fractional-order nonlinear systems: an adaptive fuzzy approach. Int J Fuzzy Syst2018; 20(2): 366–379.
21.
BoulkrouneAM’saadMFarzaM. Adaptive fuzzy system-based variable-structure controller for multivariable nonaffine nonlinear uncertain systems subject to actuator nonlinearities. Neural Comput Appl2017; 28(11): 3371–3384.
22.
JainAJainMBSrinivasE. Anovel hybrid method for short term load forecasting using fuzzy logic and particle swarm optimization. In: 2010 International Conference on Power System Technology (POWERCON), Hangzhou, China, 24–28 October 2010, pp. 1–7. IEEE.
23.
CastilloOMelinP. A review on the design and optimization of interval type-2 fuzzy controllers. Appl Soft Comput2012; 12(4): 1267–1278.
24.
LiYTongS. Command-filtered-based fuzzy adaptive control design for mimo-switched nonstrict-feedback nonlinear systems. IEEE Trans Fuzzy Syst2017; 25(3): 668–681.
25.
JanaDKDasBMaitiM. Multi-item partial backlogging inventory models over random planninghorizon in random fuzzy environment. Appl Soft Comput2014; 21: 12–27.
26.
CastilloOMartnez-MarroqunRMelinP. Comparative study of bio-inspired algorithms applied to the optimization of type-1 and type-2 fuzzy controllers for an autonomous mobile robot. Inform Sci2012; 192: 19–38.
27.
ValdezFMelinPCastilloO. Modular neural networks architecture optimization with a new nature inspired method using a fuzzy combination of particle swarm optimization and genetic algorithms. Inform Sci2014; 270: 143–153.
28.
LiuYParkJHGuoB-Z. Further results on stabilization of chaotic systems based on fuzzy memory sampled-data control. IEEE Trans Fuzzy Syst2018; 26: 1040–1045.
29.
PanYMengJELiuY. Composite learning fuzzy control of uncertain nonlinear systems. IEEE Trans Fuzzy Syst2016; 18(6): 1–9.
30.
PanYMengJESunT. Adaptive fuzzy PD control with stable H∞ tracking guarantee. Neurocomputing2017; 237(C): 71–78.
31.
ValdezFMelinPCastilloO. An improved evolutionary method with fuzzy logic for combining particle swarm optimization and genetic algorithms. Appl Soft Comput2011; 11(2): 2625–2632.
32.
LiuHLiSWangH. Adaptive fuzzy control for a class of unknown fractional-order neural networks subject to input nonlinearities and dead-zones. Inform Sci2018; 454–455: 30–45.
33.
LiuHPanYLiS. Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans Syst Man Cybern Syst2017; 47(8): 2209–2217.
34.
HeWDongY. Adaptive fuzzy neural network control for a constrained robot using impedance learning. IEEE T Neur Net Lear2018; 29(4): 1174–1186.
35.
ZhouQLiHShiP. Decentralized adaptive fuzzy tracking control for robot finger dynamics. IEEE Trans Fuzzy Syst2015; 23(3): 501–510.
36.
MendesNNetoP. Indirect adaptive fuzzy control for industrial robots: a solution for contact applications. Expert Syst Appl2015; 42(22): 8929–8935.
37.
de Jesús RubioJ. Discrete time control based in neural networks for pendulums. Appl Soft Comput2018; 68: 821–832.
38.
de Jesús RubioJGarciaEAquinoG. Learning of operator hand movements via least angle regression to be teached in a manipulator. Evolving Systems2018; 1–16. DOI: 10.1007/s12530-018-9224-1.
39.
YenVTNanWYVan CuongP. Recurrent fuzzy wavelet neural networks based on robust adaptive sliding mode control for industrial robot manipulators. Neural Comput Appl2018; 1–14. DOI: 10.1007/s00521-018-3520-3.
40.
RubioJ. Modified optimal control with a back propagation network for robotic arms. IET Control Theory Appl2012; 6(14): 2216–2225.
41.
GuoYWooPY. An adaptive fuzzy sliding mode controller for robotic manipulators. IEEE Trans Syst Man Cybern B Cybern2003; 33(2): 149–159.
42.
ChoiS-BKimJ. A fuzzy-sliding mode controller for robust tracking of robotic manipulators. Mechatronics1997; 7(2): 199–216.
43.
HongYXuYHuangJ. Finite-time control for robot manipulators. Syst Control Lett2002; 46(4): 243–253.
44.
PolyakovACoronJMRosierL. On homogeneous finite-time control for linear evolution equation in hilbert space. IEEE Trans Automat Contr2018; 63(9): 3143–3150.
45.
WangNQianCSunJ-C. Adaptive robust finite-time trajectory tracking control of fully actuated marine surface vehicles. IEEE Trans Contr Syst Trans2016; 24(4): 1454–1462.
46.
HuCYuJJiangH. Finite-time synchronization of delayed neural networks with cohen–grossberg type based on delayed feedback control. Neurocomputing2014; 143: 90–96.
47.
BhatSPBernsteinDS. Finite-time stability of continuous autonomous systems. SIAM J Control Optim2000; 38(3): 751–766.
48.
OrlovY. Finite time stability and robust control synthesis of uncertain switched systems. SIAM J Control Optim2004; 43(4): 1253–1271.
49.
QiuJSunKYangC. Finite-time stability of genetic regulatory networks with impulsive effects. Neurocomputing2017; 219: 9–14.
50.
YuJZhaoLYuH. Fuzzy finite-time command filtered control of nonlinear systems with input saturation. IEEE Trans Cybern2018; 48(8): 2378–2387.
51.
FierroRLewisFL. Control of a nonholomic mobile robot: backstepping kinematics into dynamics. J Robot Syst1997; 14(3): 149–163.
52.
SwaroopDHedrickJKYipPP. Dynamic surface control for a class of nonlinear systems. IEEE Trans Autom Contr2000; 45(10): 1893–1899.
53.
FarrellJAPolycarpouMSharmaM. Command filtered backstepping. IEEE Trans Automat Contr2009; 54(6): 1391–1395.
WangL-X. Adaptive fuzzy systems and control: design and stability analysis. Upper Saddle River: Prentice-Hall, 1994.
56.
LevantA. Higher-order sliding modes, differentiation and output-feedback control. Int J Control2003; 76(9–10): 924–941.
57.
ShenQShiP. Distributed command filtered backstepping consensus tracking control of nonlinear multiple-agent systems in strict-feedback form. Automatica2015; 53: 120–124.
58.
PanYYuH. Composite learning from adaptive dynamic surface control. IEEE Trans Automat Contr2016; 61(9): 2603–2609.