
Abstract
In this paper, an adaptive fuzzy controller is designed for the robot-manipulator. The synthesized controller ensures that 1) the close-loop system is globally stable and 2) the tracking error converges to zero asymptotically and a cost function is minimized. The fuzzy controller is synthesized from a collection of IF-THEN rules. The parameters of the membership functions characterizing the linguistic terms change according to some adaptive law for the purpose of controlling a plant to track a reference trajectory. The proposed control scheme is demonstrated in a typical nonlinear plant two link manipulator. The computer simulation of control is done by the language MATLAB. The results of simulation show that the adaptive controller well operates and provides good qualities of the control system. The presented results are analyzed.
Introduction
Robot-manipulators are characterized by complex nonlinear dynamical structure with unmodelled dynamics and unstructured uncertainties, their parameters are not constant (the deterministic mathematical model of robot non corresponds to real physical model). These features make the designing of controllers for manipulators difficult task in the framework of nonadaptive and adaptive control of nonlinear systems.
The goal of this paper is to present an engineering approach to the control of industrial robot, which uses results of theory of optimal control and fuzzy logic control to design controller. The basic idea behind fuzzy logic controller (FLC) is to incorporate the “expert-experience” of a human operator in the design of the controller in controlling process whose mathematical model is too difficult to obtain (this is true for industrial robot-manipulators). In situations where there is a large uncertainty or unknown variation in plant parameters and structures, fuzzy control should be adaptive. The adaptive FLC is constructed from FLC and adaptation algorithm, which adjusts the parameters of the controller. In this paper, we will develop an adaptive FLC for nonlinear plant two link manipulator. Design of the adaptive FLC is based on the theory of optimal control.
Optimal control of robot
We will consider robot-manipulator which dynamic model is described in state space [1]:

where mb = mz + ml; mr = mrr + mb + m2; mz = 35 kg is the mass of weight; ml = 52 kg is the grasp head and part of the arm; mrr = 62.5 is reduced mass of the gear; m2 = 78 kg is the mass of servomotors of the arm; K1=281.4Nm, K2=291Nm are the constants of the operational values; I23 = Ir + (m2 + m3 + m4)r02 where Ir = 82.5 kgm2 is reduced torque of inertial of the electric servomotor and gear-box; m3 = 90 kg; m4 = 125 kg; r0 = 250 mm.
The elements of the state vector are:

where r is translation of the arm, φ is rotating of the arm.
The control objective is a determination of an optimal control

where
The cost function (2) will be minimized, if the optimal control

Solving the system of equations (3), we have:

The control law (4) cannot be implemented since: a) the parameters of plant are unknown; b) part of state vector is not measured variables. There are many practical situations where both a) and b) are true. The adaptive FLC developed in this paper is suitable for these situations.
The basic architecture of the adaptive FLC is a standard FLC used in most systems, plus an adaptive block which adjusts the parameters of the controller. The initial adaptive FLC is constructed from the fuzzy “IF-THEN” rules provided by human experts.
Our purpose is to design a fuzzy logic system to approximate the optimal control (4). The two output fuzzy logic system with center average defuzzifier, product inference and singleton fuzzifier is of the following form:


where Aij, Bij,
In fact, such adaptive fuzzy logic controllers have been developed in the literature [2] and we simply summarize the algorithm and its property in the following lemma.
Lemma 1
Consider the nonlinear system (1) and apply the fuzzy logic controller of (5) and (6). If the parameters


we have:

The overall scheme of the developed adaptive fuzzy logic control system is shown in Fig. 1, where C is the block which inverts the error signals ei into the error vectors

The overall scheme of adaptive fuzzy control
Now, we make some few remarks.
Remark1
The developed adaptive fuzzy logic controller for two-link robot manipulator is suitable in situations, where parameters of plant are unknown. The simple adaptation laws make easy to implement the adaptive fuzzy control.
Remark2
The quality of the control system depend on coefficients γ1, γ2, α1 and α2. At present, there has been no theoretical guidance about the choice of these parameters; trial-and-error seems to be the only practical option.
In this section, we apply the adaptive fuzzy logi controller developed in this paper to control the two-lin robot-manipulator of (1). The computer simulation o control system is done by the language MATLAB. Th response of close-loop control system is shown in Fig. 2 where the given outputs are x1 r = 1 and x3 r = 0.8 γ1 = γ2 = 500, α1 = α2 = 1, in which we can see tha the developed adaptive FLC could regulate plant and th close-loop control system is stable.

The response of the control system
In Fig.3 is shown the response of the control system, where γ1, γ2 have different values. From this we can see that the quality of the control system depends on γ1, γ2 (α1 = α2 = 1). We can achieve good trajectory for given output using trial-and-error method for choosing of the values of α1, α2. The response of the control system in situation, where α1, α2 have different values (γ1 = γ2 = 500) is shown in Fig.4.
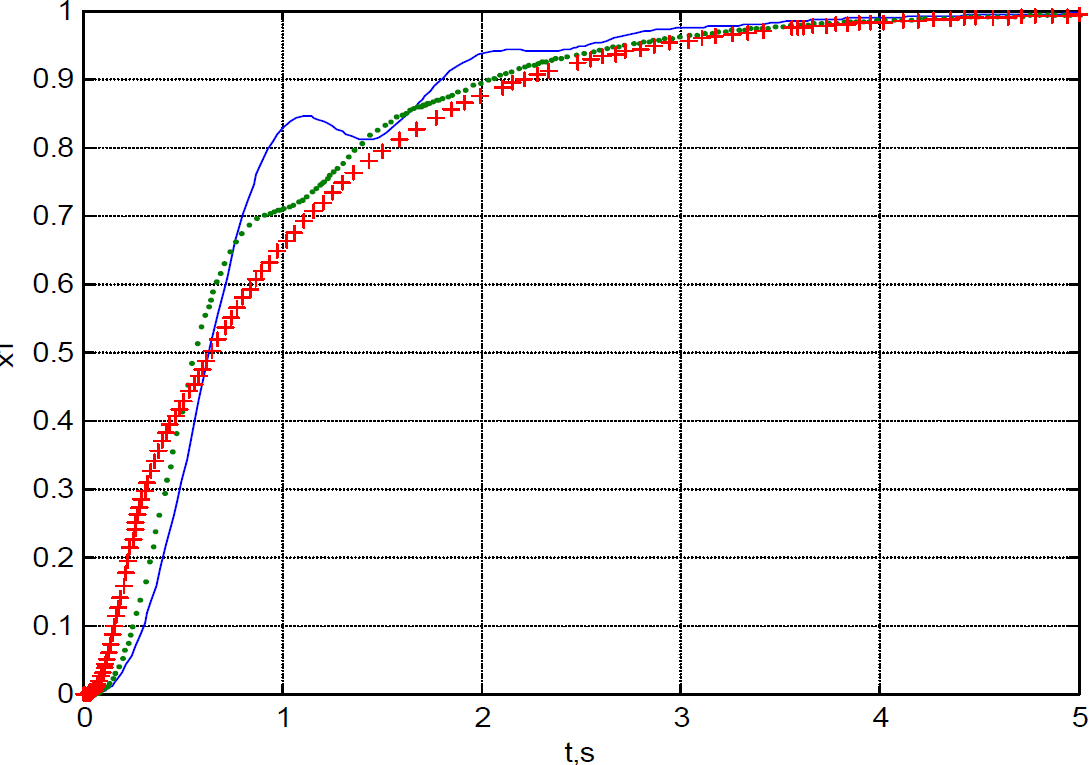
The state variable x1(t) γ1=γ2=50_, γ1=γ2=100…, γ1=γ2=500+++
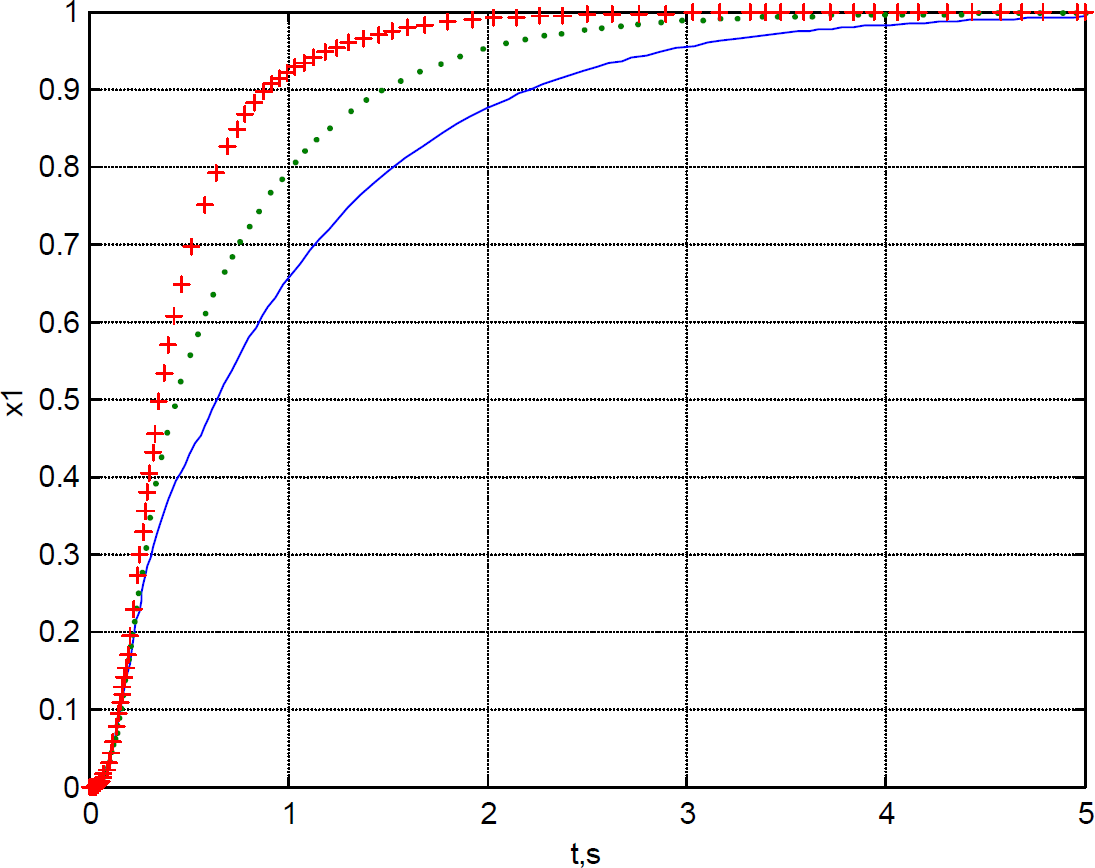
The state variable x1(t) α1=α2=1_,α1=α2=0.7.…, α1=α2=+++
In this paper, we developed an adaptive fuzzy logic controller for industrial robot-manipulator which: 1) does not require an accurate mathematical model of plant under control; 2) uses the error vector as controller's input, therefore it does not require all that components of state vector to be measurable; 3) guarantees the global stability of the close-loop system.