
Abstract
A sliding mode adaptive fractional fuzzy control is provided in this article to achieve the trajectory tracking control of uncertain robotic manipulators. By adaptive fractional fuzzy control, we mean that fuzzy parameters are updated through fractional-order adaptation laws. The main idea of this work consists in using fractional input to control complex integer-order nonlinear systems. An adaptive fractional fuzzy control that guarantees tracking errors tend to an arbitrary small region is established. To facilitate the stability analysis, fractional-order integral Lyapunov functions are proposed, and the integer-order Lyapunov stability criterion is used. Finally, simulation results are presented to show the effectiveness of the proposed method.
Introduction
During the past few years, the fractional-order calculus has been extensively studied, which has some special properties, for example, hereditary and memory. 1 –6 These properties can be well used to describe real-word systems. It should be mentioned that the integer-order one has none of these abilities. Thus, the fractional-order calculus plays a great role in modeling many actual systems, for example, stochastic diffusion, molecular spectroscopy, control theory, viscoelastic dynamics, quantum mechanics, and many research results can be seen in the previous studies 7 –16 and the references therein. As a result, the fractional-order controller (FOC) for nonlinear systems attracted enough attention. 17 –20 Compared with the integer-order controller, the FOC has one more degree, and consequently, it is meaningful to use FOC in control engineering. In the study by Pan and Das, 18 using the particle swarm optimization algorithm, an FOC for power systems was considered. Delghavi et al. 19 studied an FOC of distributed energy resource systems using a new type of sliding surface. Zamani et al. 20 designed a Proportion Integration Differentiation (PID) FOC for systems with smart base-isolated structures using a multi-objective searching method. It has been shown that stability analysis of FOC for systems with the same order is easily checked using the fractional Lyapunov method. 21 –23 However, when the order of the fractional systems is not equal to the FOC’s, the controller design becomes very difficult, and only very few results have been reported up to now.
It has been shown that the fuzzy logic systems (FLSs) have captured more and more attention in controlling domain because it can make full use of human’s expert knowledge and it does not need to know the exact model of the system. The stability analysis of the underlying system under adaptive fuzzy control (AFC) is usually discussed using Lyapunov approaches. To lessen the fuzzy approximation errors and tackle system uncertainties, an AFC can work together with some robust control tool, for example, the sliding mode control (SMC) 24 –26 and the H∞ control. 27 Recently, the adaptive fractional fuzzy control (AFFC) method has been developed for controlling nonlinear systems (fractional-order or integer-order). 28 –31 In the AFFC method, fuzzy parameters were updated by fractional differential equations. For fractional-order system, the AFFC with the same order has been studied extensively. 1,16 On the other hand, it has also been demonstrated that the AFFC can control integer-order systems, and some prior works have been done. 32 –35 In earlier studies, 32,33 an AFFC approach was given for controlling integer-order uncertain nonlinear systems, where the control performance was discussed using different fuzzy rules. An AFFC PID controller was given in the study by Mishra et al. 34 A fuzzy fractional PID controller with time-varying orders was proposed by Liu et al. 35
Recently, the control of spatial robots has captured much attention, and trajectory tracking control of robots has been extensively investigated. Spatial robotics are highly nonlinear, highly complex, and highly coupled. 36,37 To achieve the robotic control, the accurate system model and parameters are usually required, and some control approaches, such as inverse dynamic control and active tracking control, can achieve a well-controlled performance based on the accurate model. However, in practice, robotic systems usually suffer from system uncertainties, for example, sensor errors, external disturbances, parameter uncertainties, which cause unstable performance. 38 –45 That is to say, it is meaningful to investigate the control of manipulators with system uncertainties. A large range of AFC approaches were proposed. These previous works contained two types. In the first method, one has no idea about the system model. In previous studies, 46,47 FLSs have been used as approximation tools. However, there is a shortcoming in this approach, that is, in the control process, very large computation burden is needed. In the second approach, one needs to know some prior knowledge of the robotic manipulator.
To the best of my knowledge, the AFFC approach for robotic manipulators has been slightly investigated up to now. Two AFFC approaches were designed for uncertain manipulators by Kumar and Rana 48 and Sharma et al., 49 respectively, where the control performance was studied only by simulation results. It has been proven in Efe 50 that the fuzzy parameters can be updated by fractional differential equations; however, a complicated boundary condition about the boundedness of the fractional derivative of a compound function should be satisfied. The aforementioned work indicated that the AFFC method provided a remarkable performance over AFC for set point tracking, disturbance rejection, and under uncertain environment. From the above discussion, we know that the strict theoretical derivation and stability analysis of robotic manipulators under AFFC is not well solved and need further investigation.
Motivated by the above discussion, in the present work, an AFFC is proposed for robotic manipulators. FLSs are utilized to estimate the system’s unknown part. Fuzzy parameters are updated by fractional-order adaptation laws. Our work is summarized as follows.
An AFFC method together with fractional-order adaptation law is implemented. The proposed method has the self-tuning ability. Noting that the AFFC method was also proposed for nonlinear systems in the study by Efe, 50 however, in their ability analysis, a complicated boundary condition that is hard to be proven should be satisfied (see remark 2 for more details). In this work, a new Lyapunov function is proposed, and the stability is proven by integer-order Lyapunov stability criteria and FOC properties.
Compared with the conventional integer-order fuzzy control method, our approach has one more degree. That is to say, the integer-order AFC methods
1,51,52
can be seen as special cases of this article, that is, let
It should be mentioned that as the number of membership functions increases, the proposed AFFC may be more complicated. Thus, more computation burden will be added to the control systems.
The structure of this work is as follows. The second section gives some basic results of fractional calculus and FLS. Problem description is represented in the third section. AFFC design as well as stability analysis is given in the fourth section. Effectiveness of the proposed AFFC is demonstrated by simulation results in the fifth section. Finally, the sixth section concludes this work.
Preliminaries
Fractional calculus
The fractional-order calculus is an extended concept of the integer-order one. The fractional-order integral is given by

where

with
Lemma 1
Let

Lemma 2
Let

where
Description of the FLS
An FLS usually contains the knowledge base, the fuzzifier, the fuzzy inference engine working on fuzzy rules, and the defuzzifier. It can be expressed as 54

where

As a result, (5) is reformed by

The FLS has the following approximation ability
Lemma 3
Let

Problem description
The mathematical model of the considered robot is given as 56

with
For convenience, denote
Fractional fuzzy controller design and stability analysis
This section aims to drive the joint position

and

Let

where

where


Here,

and

Suppose that

where
According to the above discussion, one obtains

Let

Therefore, the control term

where
Fractional-order adaptation laws for

and

respectively, where
Remark 1
It should be pointed out that in this article fractional-order laws are designed. Compared with the conversional adaptations laws, our method has one more freedom. The integer-order adaptation law is a special condition of (21) (i.e.
Based on the above discussion, the main results of this section can be concluded as the following theorem.
Theorem 1
Consider system (8). Control inputs (11) and (20) with laws (21) and (22) can ensure that the tracking error tends to an arbitrary small region of zero ultimately.
Proof
To proceed, we will introduce the following fractional-order integral Lyapunov function

where
Then it follows from lemmas 1 and 2 that
Substituting (21) and (22) into (24) leads to

where
Thus, (25) implies that
Remark 2
It should be pointed out that an AFFC method was also proposed for nonlinear systems. 50 To achieve the stability of the closed-loop system, the following complicated boundary condition of the fractional of a compound function should be satisfied


with
Remark 3
Theorem 1 indicates that the sliding surface will converge to region determined by design parameters as

Noting that
Remark 4
There are some other approaches that can also be utilized to control robots, for example, the PID, the SMC, and the H∞ method. It is well-known that the PID approach cannot tackle the dynamical uncertainties. With respect to the SMC, it can only handle some matched uncertainties. To use the H∞ control, one should guarantee that the complicated Riccati equation is satisfied. Whereas, our method can not only obtain a fast convergence of the tracking error but also is effective for handling the unmatched external disturbances in the robotic manipulator.
Simulation results
In this part, we will give the simulation results, and a two-link robotic manipulator will be considered (see Figure 1).

Two-link robot.
System parameters are

where
Let
We give three Gaussian membership functions distributed in the interval
Simulation results can be seen in Figures 2 to 8. Tracking of joints 1 and 2 and time response of tracking errors are given in Figures 2, 3 , and 5, respectively, from which one can see that the tracking errors tend to a region nearby zero in a short time (about 3 s). Time response of sliding surfaces is given in Figure 4. The smoothness and continuousness of the control inputs are given in Figure 8. From these results, we can draw a conclusion that the control performance is good.

Tracking of joint 1.

Tracking of joint 2.
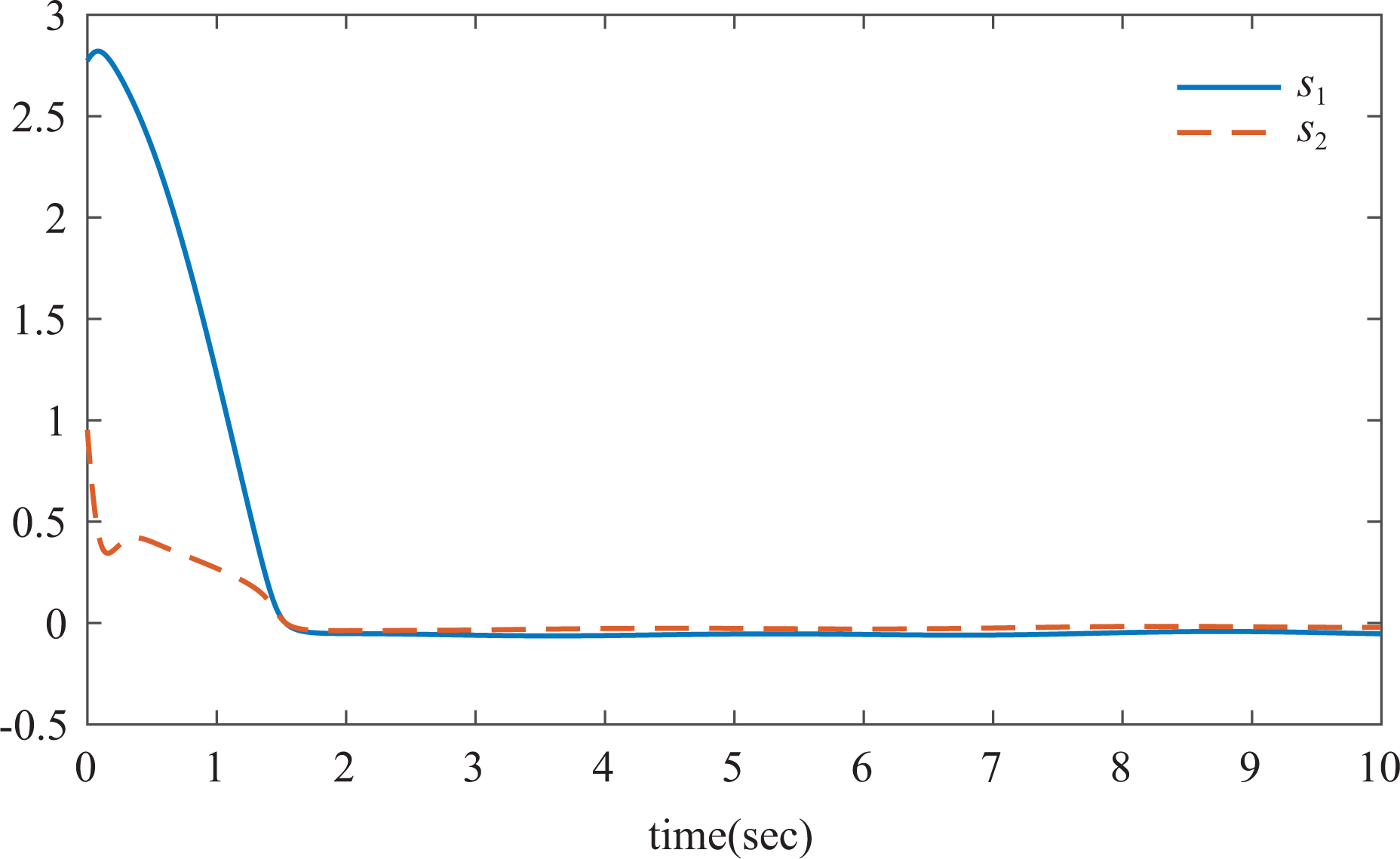
Sliding surfaces.

Tracking errors


Control inputs
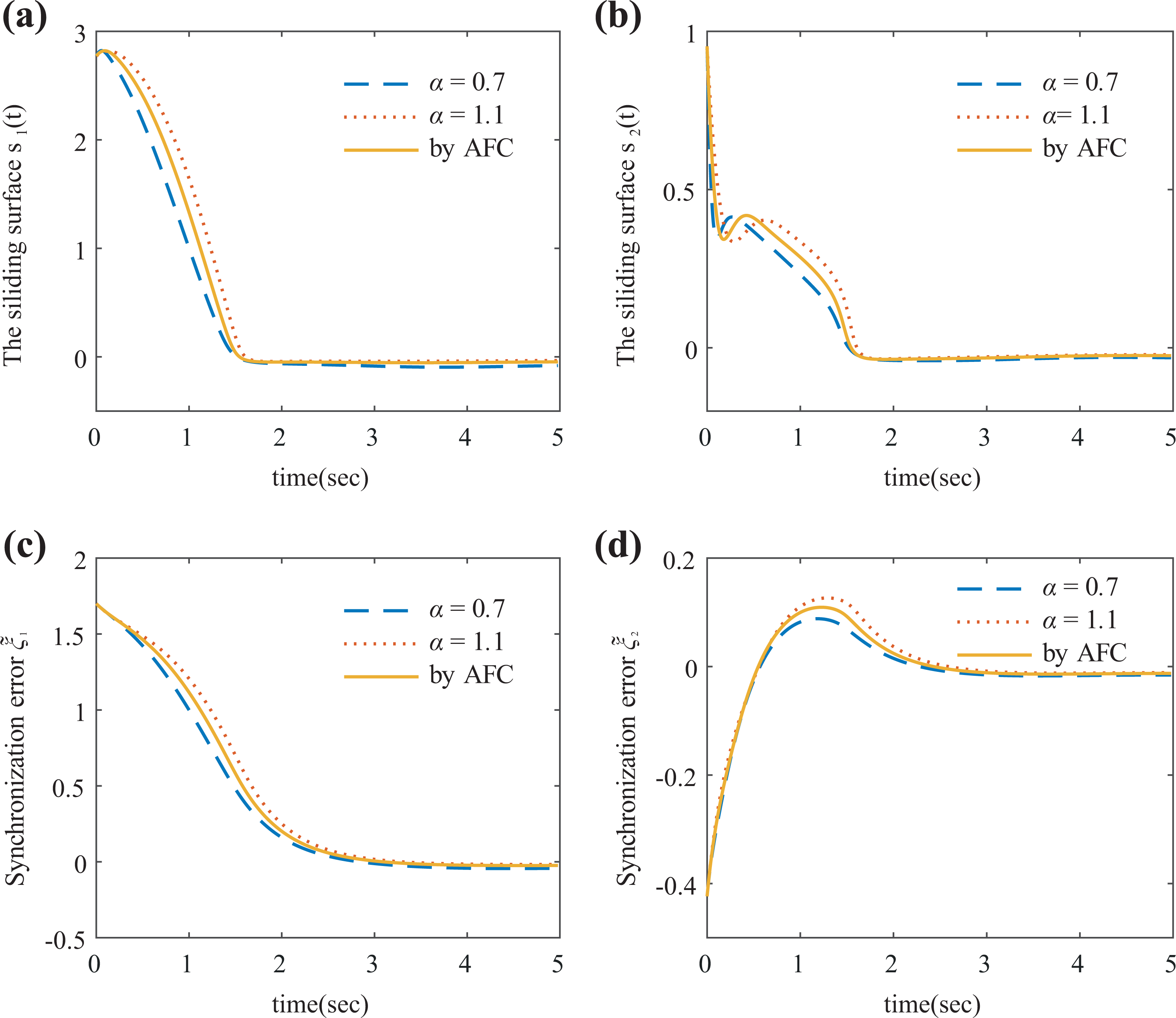
Control performance under different α in (a) the sliding surface
Noting that the proposed AFFC method has one more degree compared with the conventional AFC approach, the control performance with different orders, that is,

Control performance under different α in (a)
Conclusions
In this study, to obtain the trajectory tracking of robotic manipulators, an AFFC method is introduced by combining with an SMC algorithm, and the proposed method can guarantee the uniform ultimately boundedness of tracking errors. It is proven that the FOC can be used to control conventional integer-order nonlinear systems based on a new type of fractional-order integral Lyapunov function. The simulation test on a two-link robotic manipulator shows the advantages of the proposed scheme: The proposed controller does not need the prior knowledge of the system, but the control performance is still good. This work can be seen as an extension of recent research. 50 –52 It should be pointed out that the proposed method can only guarantee that the tracking errors tend to a small region eventually. Therefore, future research can be concentrated on how to improve the proposed method such that the tracking errors are asymptotically stable, and how to improve the control performance in the presence of input nonlinearities such as saturation, dead zone, and actuator faults.
Footnotes
Data availability
The data used to support the findings of this study are available from the corresponding author upon request.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (Grant No.s 11361009, 61772006), the New Centaury National Hundred, Thousand and Ten Thousand Talent Project of Guangxi (Grant No. GUIZHENGFA210647HAO), the Guangxi Natural Science Foundation (Grant No. 2018GXNSFAA138181), the Special Fund for Bagui Scholars of Guangxi (Grant No. 2016A17), and the High Level Innovation Teams and Distinguished Scholars in Guangxi Universities (Grant No. GUIJIAOREN201642HAO).