
Abstract
This paper investigates finite-time control of uncertain robotic manipulators with external disturbances by means of neural network control and backstepping technique. To solve the “explosion of terms” in traditional backstepping control, a second-order command filter is designed, and the virtual input and its first-order derivative can be obtained accurately in a finite time. The parameters of the neural network are updated by using the tracking error signals. The proposed controller can guarantee that the tracking error converges to a small region of the origin in some finite time. Finally, we give a simulation study to show the effectiveness of the proposed method.
Keywords
Introduction
As we all know, robots have a wider range of applications, such as deep-sea rescue, medical care, education, and complex environments. However, system uncertainties usually exist in a robot system, and will result in unpleasant control performance, or even the instability of the robot. Thus, it is meaningful to study the control of uncertain robotic manipulators. Recently, control algorithms represented by fuzzy systems and neural networks (NNs) have been used extensively in the control of robotic manipulators, because these systems can be well used to eliminate the system uncertainties. 1 –9 In the study by Yang et al., 2 a NN control method was proposed for robotic manipulators based on an observer, where the proposed method is very effective for canceling the effect of external disturbance and has very good robustness. To enhance the control performance for robotic manipulators, Deng 10 proposed an adaptive fuzzy control method by using backstepping technique, and in which the finite-time control was also considered. In the study by Yen et al., 11 a novel control method named recurrent fuzzy wavelet NN sliding mode control was proposed. In the study by Muñoz-Vázquez et al., 12 fractional-order control together with fuzzy control was proposed for robotic manipulators. It should be mentioned that although the above methods are effective for control uncertain robots, the saturation problem that often exists in robotic manipulators is not considered.
In real-world systems, the system variables are often constrained by some conditions, especially in the robot systems because the driving force of the robot is limited. When input saturation takes place, it is a challenging work to design adaptive controllers for the controlled systems. Thus, it makes sense to study the control of robotic manipulators considering the input saturation. In this field, some prior works have been done.
13
–15
On the other hand, backstepping control methods are often used to control nonlinear systems with triangular form.
16
–19
In this method, some medium variables are recursively treated as virtual control inputs. Integer-order backstepping controller needs to remove the nonlinearities of system. However, when the system with unknown parameters or model is uncertain, this method is often unable to achieve the expected goal. In fact, robotic manipulators can be written as strict-feedback systems, and thus, backstepping control methods can also be used. For example, in the study by Nikdel et al.,
20
a fractional fuzzy backstepping controller was implemented for robot; in Liu et al.,
21
finite-time
There are two main reasons that drive us to do this work. Firstly, it has been shown that in above literature, finite-time control of robotic manipulators has rarely been investigated by using NNs. Secondly, in existing literature that considers backstepping control of robotic manipulators, the “explosion of terms” problem has not been well solved. Thus, in this article, we will address the finite-time control of robotic manipulators by using NN control. The main contributions of this work are concluded as follows: (1) A second-order finite-time filter is designed to obtain the finite-time estimation of the virtual input and its derivative, and thus the “explosion of terms” problem can be solved; (2) compensated signals are designed to tackle the estimation errors of the virtual inputs; (3) input saturation problem is also considered in the finite-time NN controller design, and the uncertain term of the saturation as well as the system uncertainties are approximated by NNs.
This work is arranged as follows: The second section presents some basic results about the NN and the finite-time stability of nonlinear systems. Finite-time controller design by using a backstepping procedure is given in the third section. Simulation studies are presented in the fourth section. Finally, the main conclusions of this work are summarized in the fifth section.
Preliminaries
Description of a NN
A multi-layer NN is effective for modeling nonlinear functions due to its excellent capabilities in function approximation, which is given by

with

Thus, a NN can be given by

where

with

with
Basic lemmas
The following lemmas are presented to facilitate the subsequent analysis.
Lemma 1
Suppose that
Lemma 2
Let

with

Lemma 3
Consider

where

Control design
An n-link robotic manipulator can be described by 26

with
In robotic manipulators control, one hopes that the output can change evenly with the input. However, it is well known that system constraints usually exist in robotic manipulators, that is, if the input arrives at a certain value, the output cannot increase anymore. A mapping from

where

The saturation phenomenon.
Denoting the term that exceeds the saturation limiter as

For system (6), we have the following assumption.
Assumption 1
Remark 1
It should be pointed out that assumption 1 is not strict because most robotic manipulators satisfy this condition. In a robotic manipulator,
For facilitating the controller design, let us rearrange system (6) into the following triangular form by denoting

in which
The control objective is to drive the position vector

where

with

in which

with

with
On the other hand, (7), (8), (9), and (13) imply

in which

Define the ideal parameter of NN as

For convenience, denote

Based on the above discussion, we can use the following compensated signal

with

with

Multiplying

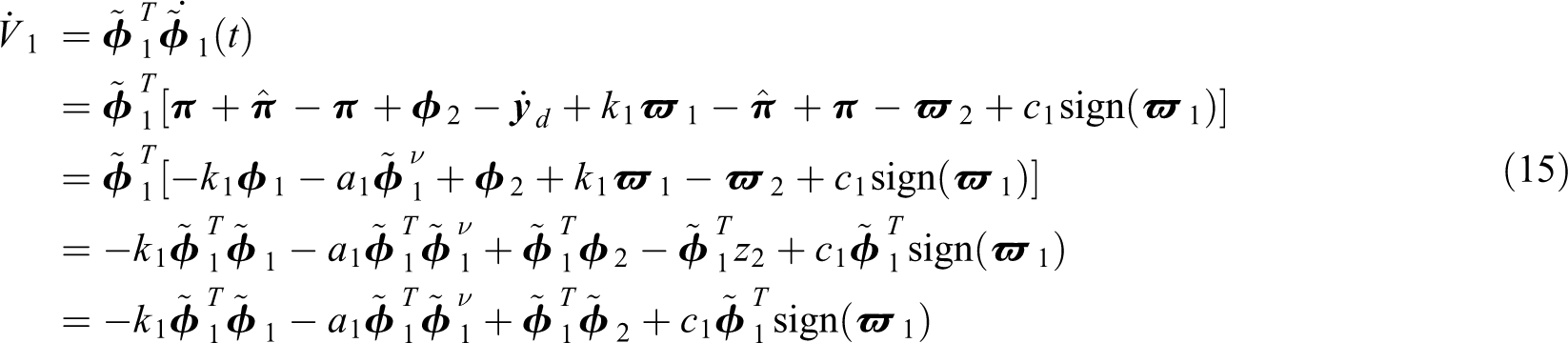
Let the Lyapunov function be

Then, (15), (23), and (24) imply

We can use the following adaptation law

with
Thus, we have the following theorem:
Theorem 1
Consider system (9) under assumption 1. The virtual input in the first step is given by (14), which together with its derivative is estimated by the command filter (12). To cancel the estimation error, the compensated signals are given by (11) and (20). Thus, the implemented controller (21) and the adaptation law (26) guarantee that tracking error
Proof
Define

Then, based on (25), (26), and (27), we obtain
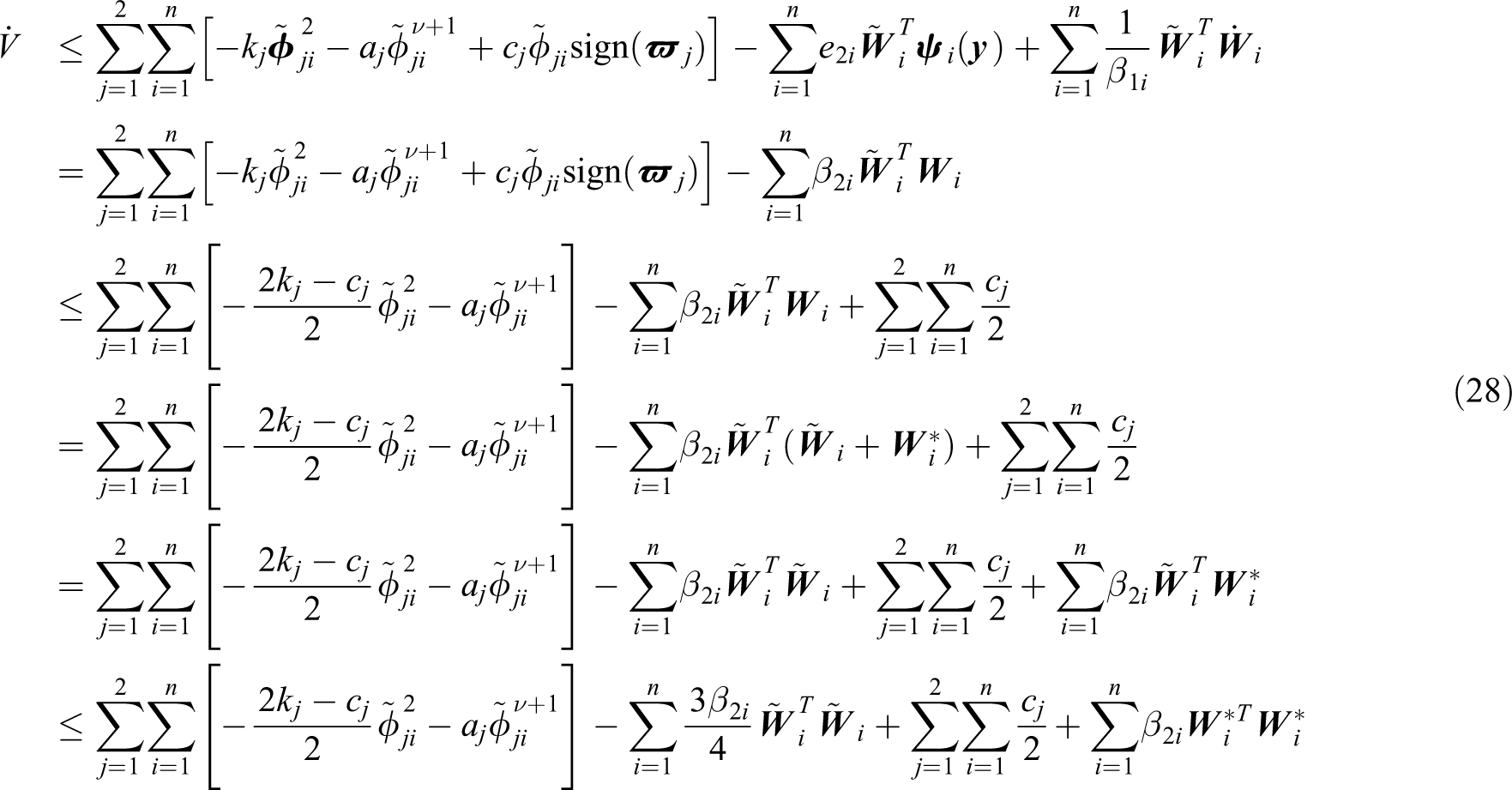
Then, (28) implies

When

Else, when

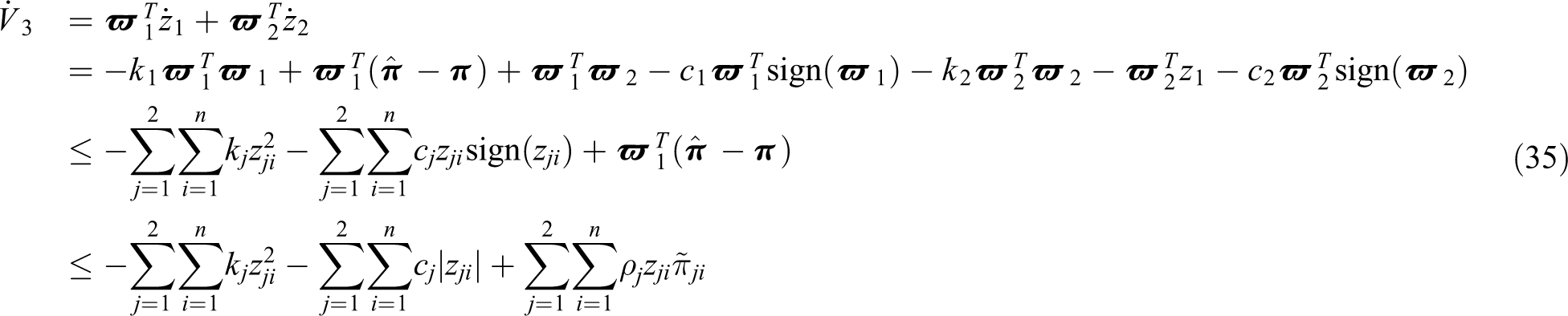
As a result, (30) and (31) imply

Substituting (32) into (29) yields

with

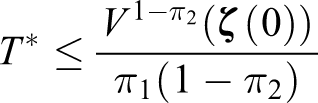
Based on (34) and lemma 2, if

in a finite time. Note
with
Thus, (12) and lemma 3 imply that

where
Remark 2
To prove theorem 1, a conclusion, that is,
Remark 3
In the controller design, some design parameters are given, for example, b
1 and b
2 in (12), which determine the converge speed of the filters, and they should be chosen largely to get rapid convergence;
Remark 4
It can be concluded from (36) that all signals in the closed-loop system are bounded, and so does the signal u. Thus, from (8), since ur
is a bounded constant, thus
Remark 5
It is well known that conventional backstepping control method has a very nerve-racking problem, that is, “explosion of terms,” which is produced by differentiating the virtual control input again and again. To solve this problem, in this article, we give a second-order command filter (12). Thus, we do not need to solve its derivative in the second step, and its derivative is also estimated by (12). In addition, the proposed filter (12) can estimate
Simulation results
To show the control performance of the proposed method, in this part, simulation studies will be carried out by using a two-link robotic manipulator, which can be seen in Figure 2.

A two-link robotic manipulator.
The details of system model (6) are given as follows:
According to the theoretical analysis, denoting
Simulation results are indicated in Figures 3 and 4. In Figure 3(a) and (b), it is shown that the tracking errors and their derivatives converge to zero in short time, and the tracking performance is good. The control inputs are given in Figure 3(c), it is smooth because in the simulation, we replace the sign function with

Control performance in (a) tracking errors, (b) derivatives of tracking errors, (c) control inputs, and (d) input saturation.

Simulation results in (a) tracking performance of x
1, (b) tracking performance of x
2, (c) tracking performance of
Conclusion
In this article, we mainly investigate the finite-time tracking control for robotic manipulators with system uncertainties and disturbances. Firstly, we give a second-order command filter that can estimate the virtual input and its derivative in finite time, and the estimation error can be eliminated by a compensated signal. By doing this, we do not need to calculate the derivative of the virtual input repeatedly, and thus the “explosion of terms” problem will not occur. It is shown that the proposed method can drive the tracking error to the origin in finite time and keep all the signals bounded. It has also been shown that the proposed control method has good robustness. How to implement controller for robotic manipulators with experiment studies is one of our future research directions.
Footnotes
Data availability
The data used to support the findings of this study are included within the article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Research Key Project for Universities of Anhui Province (KJ2019A0108).