
Abstract
The article proposes an estimator and command filtering-based adaptive neural network controller for the electrically driven flexible-joint robotic manipulators with output constraints under the circumstance of matched and mismatched disturbances in system dynamics. The presented method is designed based on electrically driven model of the n-link flexible-joint robotic manipulators, which introduces more uncertainties and increases the dimensionality of the system but is more in line with practical. In view of the properties of fast convergence speed and great estimation performance in radial basis function neural network, radial basis function neural network is used to approximate the internal uncertain dynamic parameters of the system. An observer-based estimator is introduced for estimating the matched and mismatched disturbances in flexible-joint robotic manipulator dynamics. As to the differential explosion problem in backstepping control design, this article utilizes second-order command filters to overcome it. This article also adopts barrier Lyapunov functions for implementing output constraint to consider security issues in practical use. For demonstrating the effectiveness of the proposed controller, numerical simulations on two-link flexible-joint robotic manipulators are conducted. On the basis of the comparisons among estimator and command filtering-based adaptive neural network controller and other advanced controllers, the superiorities of estimator and command filtering-based adaptive neural network controller in several areas are proved.
Keywords
Introduction
As an advanced manufacturing tool, robotic manipulators have been extensively used in precision operations. 1 –3 thus posing higher demands on robotic trajectory planning and motion control. 4 As technology evolves, the study of flexible-joint robotic manipulators (FJRM) has received close attention from researchers and has become a popular topic in last few years. Since the FJRM is a highly nonlinear system, in order for FJRM to work well with the surrounding, scholars have developed diverse control methods, such as feedback linearization control, 5,6 passivity control, 7,8 singular perturbation control, 9,10 adaptive sliding mode control (SMC), 11,12 proportional-derivative control, 13,14 fault tolerant control, 15,16 and adaptive backstepping control. 15,17,18 Among them, the backstepping technique is a Lyapunov-based recursive scheme, which is a broadly used method for nonlinear system control. According to the technology, it can implement tuning and tracking characteristics through a stepwise paradigm. However, for the classic backstepping technique, differential explosion which is caused by reduplicative derivations of virtual control signals is a huge obstacle that prevents backstepping technique from broadly application. For overcoming this difficulty, Li et al. 19 –21 introduce a first-order command filter (FOCF) at every process of the backstepping control design effectively preventing the reduplicative derivations of virtual control signals. This method we call dynamic surface control (DSC). Although the differential explosion problem is solved, a new series of tracking error is generated because of the utilization of FOCF. Jiang et al. 22,23 improve the performance of DSC by replacing the FOCF with a second-order command filter (SOCF) for obtaining better signals. Furthermore, an error compensating mechanism (ECM) is designed to make up for filter errors.
As we all know, FJRM is a complex nonlinear system with many parameters in the model-based controller. 24 –26 Furthermore, some parameters are not possible to obtain in some cases. Hence, developing a method that is able to reduce the requirements for model parameters in controller design is quite important. During the last decade, the utilization of neural networks (NN) has captured a great deal of scholarly interests due to their learning ability and parallel processing capability 27 –29 which can to some extent lower the dependence of robot parameters in controller design. And the neural networks control scheme is broadly employed to figure out the track tracking issue of robotic manipulators on account of Lagrange dynamics model. For instance, Cheng et al. 9 resolves tracking control problems of FJRM with n links according to NN technique and singular perturbation theory; He et al. 30 suggest an NN control scheme to approach the uncertain dynamic terms in the model and solves the problem of parameter inaccessibility; Ding et al. 31 put forward an NN controller for estimating the time-varying external disturbance; 32 puts forward an optimal bounded ellipsoid identification algorithm for NN for estimating the uncertain dynamics of robot manipulator. Although FJRM control has made great advancement due to the learning capability of NN, the shortcomings that the estimation errors of NN cannot converge and their weight calculation update laws depend solely on tracking errors as well as transient approximation value remain to be addressed. Thus, NN is not an ideal technique for estimating time-varying external disturbance. Yang et al. 33 propose a composite NN control law which unites NN and disturbance observer (DO) and effectively make up the shortcomings of NN by use of DO.
For the sake of enabling the designed control scheme more suitable for actual applications, further improvements of the dynamic model of robotic manipulators are being considered in some recent studies in the literature. Deng et al. 34 develop a control scheme based on hydraulic-driven robotic manipulator and improve its model by taking actuator dynamics into consideration. Li et al. 31,35 design a controller based on the electrically driven FJRM model, which makes the studied system more universal because of the attention of the dynamics of the joint and the electrically driven DC motor. As a result, dimension of the controlled system is increased, more unknown parameters and disturbances shall be considered and in consequence the complexity and difficulty in controller design are leveled up. As the dimensions increase in controlled system, the emergence of mismatched uncertainties becomes a huge problem in control law design. Over the past decade, unremitting endeavors have been made to accommodate mismatched disturbances. Ding et al. 31 use NN for estimating the matched and mismatched disturbances in FJRM dynamic system yet fail to solve the problem that estimation errors of NN can’t converge. Norton et al. 36 –38 adopt SMC technology to improve the robustness of the controller and to deal with the effects of mismatched disturbances. But this strategy cannot fully compensate the mismatched disturbances in the system and makes the design of controller be conservative. To break through the conservativeness, Deng et al. 39,40 employ an extended state observer to estimate the mismatched disturbances as well as unmeasurable states signals. Zhang et al. 41 –43 introduce DO for compensating mismatched uncertainties yet these DO fail to make estimation errors asymptotically stable and require several strict prior assumptions on the uncertainties. Xiao et al. 44 propose an observer-based estimator (OBE) that not only achieves asymptotic stabilization of the error but also does not require any prior knowledge of the bound about the mismatched disturbances.
In addition, in the practical use, especially in some high precision work such as medical surgery, output constraint of FJRM is significantly indispensable for sake of security concerns. Wu et al. 45 –47 adopt a barrier Lyapunov function (BLF) for realizing output constraint and acquire successful result.
Inspired by the above investigations, this article designs an estimator and command filtering-based adaptive neural network (ECBNN) controller to ensure full-state tracking of a FJRM nonlinear system with n links in the presence of model uncertainty and external disturbances. Different from Li et al. 19 –21 where merely use FOCF for working out the differential explosion problem, the proposed ECBNN introduces a SOCF to solve it, which can offer better robust and precision than FOCF. Besides, the proposed controller constructs an ECM to compensate for a new set of tracking errors arising from the use of command filters. Not same as Cheng et al. 9,30,31 where only employ NN to approximate uncertainties that include model uncertainties as well as disturbances, the proposed control framework combines an OBE with NN control law where OBE is mainly utilized to approximate time-vary external disturbances and can make up the previously mentioned shortcomings of NN. Distinct from Zhang et al. 41 –43 where the exact bounds of the disturbances have to be known, the introduced OBE doesn’t require any prior knowledge about the disturbances’ bounds, which means it has a wider range of uses. Moreover, the OBE can ensure the estimation errors to be asymptotically stable. Differ with He et al. 9,30,33 where only consider joint dynamic in control law design, ECBNN considers the dynamic of DC motor in FJRM, which introduces more uncertainties and increases the dimensionality of the model, but is more in line with practical applications. Besides, output constraint of FJRM is considered in the proposed control scheme for the sake of using security.
In general, the major contributions of this article, in comparison with available work, are as follows. Replace FOCF into SOCF to enhance the capability of the controller in solving the differential explosion problem. Besides, an ECM is constructed to compensate errors generated by SOCF. Propose a composite control scheme consisting of NN and DO, which not only can lower the dependence of robot parameters in controller design but also make up the shortcoming that estimation errors of NN cannot converge. Introduce a novel OBE to compensate the matched and mismatched disturbances in FJRM dynamic system which can achieve estimation error asymptotically stable and broaden the range of utilization of the control law for the introduced OBE doesn’t require any prior knowledge about the disturbances’ bounds. To be more practical, the dynamic model of FJRM in this article is improved by taking the dynamic of DC motor into consideration, which introduces more uncertainties and increases the dimensionality of the model. Output constraint of FJRM is designed as well for the reason of using security.
The rest of the article is arranged in the following structure. The second section presents FJRM dynamic model and some techniques used hereinafter. In the third section, the course of design ECBNN controller is stated, which consists of control law design and system stability analysis. In the fourth section, the simulation results are illustrated to demonstrate the superiorities of ECBNN and some comparisons with other advanced control schemes are also made in this section. Finally, several conclusions are given in the fifth section.
Problem statement and preliminaries
Modeling of EDFJRM
For FJRM modeling, most of the literatures model the DC motor providing the drive torques as pure torque sources which ignores the influence of DC motor dynamics. However, DC motor dynamics forms an essential part of the overall FJRM dynamics, notably in the conditions of high-speed motion and highly variable loads. Besides, in theory, the more detail that can be included, the higher the level of performance that can be attained. By taking the dynamic of DC motor into consideration, the disturbances exerting on DC motor will be compensated through the estimation given by the designed DO. In comparison, such disturbances cannot be compensated by the controllers in most of the literatures that model the DC motor as pure torque sources. It is for considering the uncertainties and disturbances of the DC motor that the proposed controller will be safer than the controller that does not consider. Nevertheless, not all details have to be represented on the model. To simplify the analysis and minimize on-line computational requirements, only the most significant dynamic elements of DC motor should retain in the dynamic model. Thus, we add the dynamic model of DC motor for improving control performance while this newly added dynamic model is only characterized by the most significant elements in DC motor circuit. As for the nonsignificant parts, we categorize them uniformly as uncertainties and will estimate them with OBE.
According to the above analysis, we construct the dynamic model of EDFJRM with n links as follows 31



where

Simplified physical model of EDFJRM. EDFJRM: electrically driven flexible-joint robotic manipulator.
Assumption 1
The disturbances d 1, d 2, d 3 are bounded and their bounds are unknown.
Remark 1
The simplified flexible-joint robotic manipulator model is constructed under the following two assumptions: (1) The mass distribution of the motor rotor is uniform, the joint axis and the rotation axis coincide, and the influence of the uneven mass of the motor rotor on the moment of inertia can be ignored. (2) The influence of connecting rod rotation on rotor kinetic energy of joint motor is negligible. However, in the real situation, the distribution of the motor rotor mass is not uniform, and the uneven mass has an effect on the rotational inertia in the model; the joint axis and the rotation axis of the motor rotor do not usually coincide and the connecting link rotation has an effect on the kinetic energy of the joint motor rotor. These are the major differences between the dynamic model and the real FJRM.
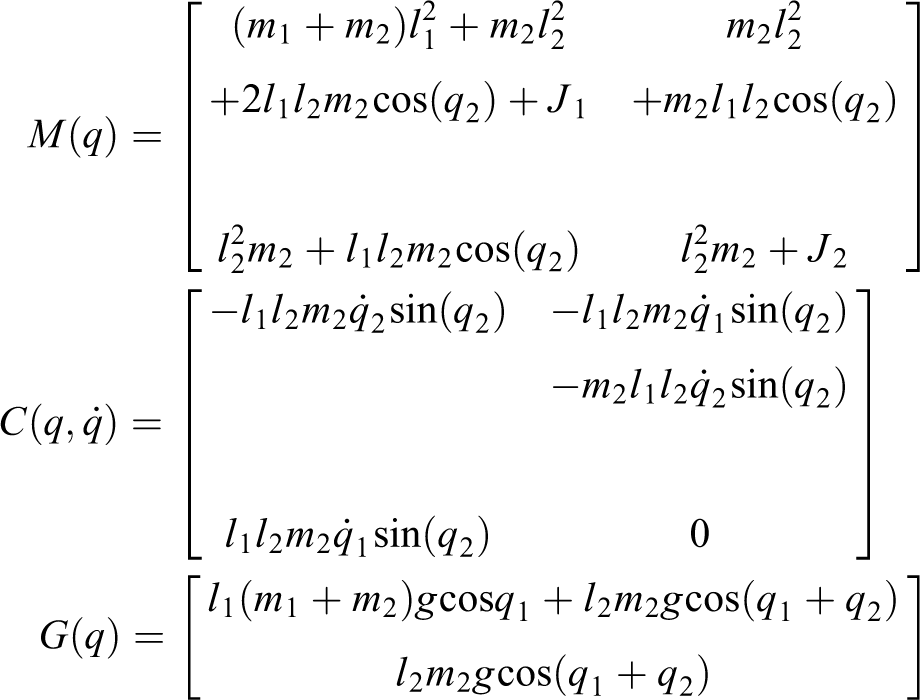
To facilitate expression, we use G, C, M to denote

where
Application of radial basis function neural network
Noticing that radial basis function neural network (RBFNN) possessing a property that it can approximate any arbitrary nonlinear function in any given accuracy, we employ it to cope with the problem of internal uncertainties in FJRM dynamic model.
The property of RBFNN can be formulated as

where
Remark 2
In the dynamic model of flexible-joint robotic manipulator, the most complicated and hardest parts to be modeled are the inertia matrix M, Coriolis and centrifugal force matrix C, gravitational force G which are strongly influenced by state variables and usually hard to acquire their exact expression. Therefore, in this article, we utilize RBFNN to approximate all the terms related to the matrices M, C, G which enables us build the control law without any prior knowledge of the matrices M, C, G and improve the robustness and accuracy of the controller. These terms composite a lumped term Q which is formulated as follows

where

where
Introduction of the novel OBE
To deal with the mismatched uncertainties
Remark 3
Considering that DO can achieve finite time convergence, it is desirable for utilizing DO to observe disturbances.
To facilitate the introduction of OBE and the design of the tracking controller, the dynamic model (4) shall be transformed into

where

Rewriting (9) into matrix form, we have

where





and
Then, we introduce an auxiliary system for designing the estimator

and we define a dynamic error

(18) is a linear system where
Then, we define the output of the linear system (18) as

where

In (20),
Using (18) minus (20), the observer error

According to (19), (18) and

Remark 4
The estimator (19) doesn’t require any prior knowledge about the bound of uncertainty
Preliminary of SOCF
Lemma 1
(Command filter):
48
Consider the following SOCF with

For any
Remark 5
In traditional backstepping control design, if the order of the controlled system is high, we need to derivate a virtual control law many times to construct the actual control law. Such phenomenon, we call differential explosion problem, will produce a great amount calculated quantity for the computer and impair the performance of the system. Therefore, to solve this problem, DSC was proposed which set a filter for each of virtual control laws and avoid the numerous times of derivation of them. Yet, the commonly used filters in DSC during latest years is first-order. Considering that the higher order the command filter is, the smoother and more robust the output of the command filter will be, we replace the FOCF by second-order one which can to some extent enhance the robustness of the system.
ECBNN control design
Control law design
In this section, combining with all of the aforementioned theories, we will design ECBNN controller through backstepping technique.
The tracking errors for each of state variable are specified as

where
The compensated tracking errors are specified as

where
Remark 6
In the following backstepping control design, when we use the output of an SOCF to approximate a virtual control law, there will be estimation errors that influence the controller performance. Therefore, an ECM that can overcome the drawbacks of utilizing SOCF and improve the performance of the controller are required to design.
Step 1. Select a BLF for the first Lyapunov function as

where
Remark 7
To prevent output variables from violating the required constraints, we adopt BLF whose value can grow to infinity if
Differentiating (26) and placing (25), (24) and the first equation of (4) into it, we obtain

where
Then, we construct the compensating signal


where c 1 is a positive design constant denoting control gain. Putting (28), (29) into (27) and simplifying it further, we obtain


Step 2. The second Lyapunov function is chosen as

Taking the derivative of (32) and placing (25), (24), and (8) into it, we obtain

Then, we construct the compensating signal


where c
2 is a positive constant denoting control gain.

where

where
Step 3. Select the third Lyapunov function as

Taking the derivative of (38) and placing (25), (24) and the third equation of (4) into it, we obtain

Then, we construct the compensating signal


where c 3 is a positive design constant denoting control gain. Putting (40), (41), into (39) and simplifying it further, we obtain

Step 4. Select the fourth Lyapunov function as

Taking the derivative of (43) and placing (25), (24) and the fourth equation of (4) into it, we obtain

Then, we construct the compensating signal


where c 4 is a positive design constant denoting control gain. Putting (45), (46), into (44) and simplifying it further, we obtain

where
Step 5. Select the fifth Lyapunov function as

Taking the derivative of (48) and placing (25), (24) and the fifth equation of (4) into it, we obtain

Then, we construct the compensating signal


where c 5 is a positive design constant denoting control gain. Putting (50), (51), into (49) and simplifying it further, we obtain

where

Block diagram of the proposed ECBNN control strategy. ECBNN: estimator and command filtering based adaptive neural network controller.
System stability analysis
Definition 1
(SGUUB):
33
The system’s solution
Considering the following compact set

where U represents a constant with positive value.
The candidate Lyapunov function V is formulated as

where


According to (22) and (21), we can calculate that

where


Therefore, taking derivative of VD (55), we obtain

Taking the derivative of

Hence, taking derivative of (54) and using (30), (37), (42), (47), (52), (58), (59), we obtain

Using Young’s inequality and

where
Setting the control parameters as

where

According to the compact set (53), we can conclude that

Them, on the basis of (64), we have proved that

Therefore, we can draw the conclusion that all of the errors of state variables
Simulation studies
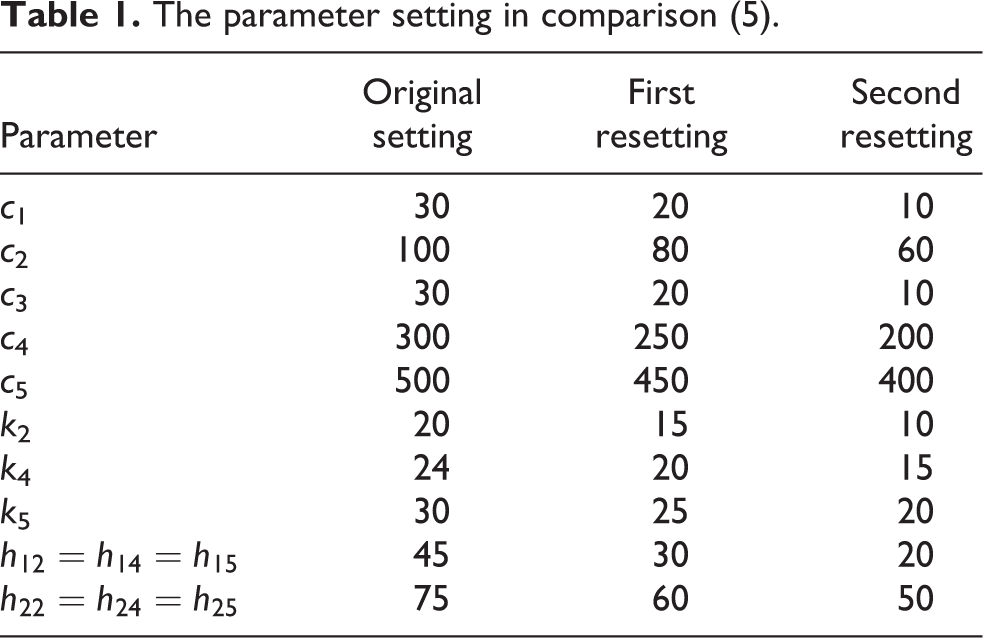
To check the theoretical outcomes, this section simulates ECBNN on a two-link FJRM and will verify the effectiveness of the ECBNN by comparing the following aspects: (1) Compared with the traditional backstepping controller (BSC) of FJRM, 33 whether the proposed ECBNN can solve the differential explosion problem? (2) Compared with the FOCF in DSC, 31 whether the SOCF in ECBNN can provide better tracking performance? (3) Compared with the traditional BSC with SOCF, 17 whether the introduction of ECM in ECBNN can enhance the tracking accuracy? (4) Compared with the NN controller, 30 whether the introduced OBE in ECBNN has the superiority in coping with matched and mismatched disturbances? In addition, we make two simulations comparing about the parameter setup and display them in (5) and (6). In (5), the parameters of RBFNN are kept constant (identical to the values in (1), (2), (3), (4)) and all the gain values, including those of OBE, are reduced twice to see how they affect the performance of our controller at each change. In (6), we keep all the gain values constant (identical to the parameter values in (1), (2), (3), (4)) and alter the parameter values of RBFNN twice to find out how they affect the performance of our controller at each change. The combinations of parameter for the two variations in (5) and (6) are, respectively, presented in Tables 1 and 2, and the control results are shown in Figures 15 and 16. To better demonstrate the robustness of the controller in real-world applications, white noise is added to the simulation from 2s to 8s. The observations of OBE for noise and disturbances are shown in Figure 17. The estimation results of RBFNN are illustrated in Figure 18.
The parameter setting in comparison (5).
The parameter setting in comparison (6).

Without loss of generality, a two-link FJRM is used for the following simulation. The dynamic equation of FJRM is described by equations (1) to (3), where
We set the disturbances to



and the desired trajectories are set as
Simulation parameters in the EDFJRM model.

EDFJRM: electrically driven flexible-joint robotic manipulator.
Simulation parameters in the ECBNN.

ECBNN: estimator and command filtering-based adaptive neural network.
The number of RBFNN nodes is set as eleven. The centers for Gaussian functions are uniform distributed over the interval
Remark 8
There are several major modern techniques in tuning design parameters which is Baby Sitting, Grid Search, Binary Search, Random Search, and Bayesian Optimization. In these methods, each simulation parameter setting of the Grid Search, Random Search are random and independent, with no correlation between them, but simply multiple random attempts. Yet Baby Sitting, Binary Search, Bayesian Optimization are all based on the simulation results of the previous parameter setting to decide how to adjust the parameters of the next simulation, such methods are very efficient for people who have a lot of experience in tuning parameters. Therefore, in this article, we use Baby Sitting to acquire the control parameters in Table 4 and obtain a balance between convergence speed and oscillation. Firstly, we set the parameter values of the neural network parameters roughly according to the values most literatures use. Secondly, the gain parameter values we choose have to satisfy the theoretical constraints in system stability analysis. Based on these constraints, we set each of the gain parameter values to the smallest integer value that satisfies their respective constraints. We perform simulation experiments on such parameter setting method and check the simulation results. If the result is not satisfactory, we increase the order of magnitude of each gain parameter value separately and repeat the experiment until we determine the order of magnitude of each parameter value with the best simulation result. And then fine-tune each parameter value at the single-digit level. Thirdly, after determining the appropriate gain parameter values, we adjust the neural network parameter values, which are generally fine-tuned around the empirical values to obtain the best estimation results. The parameter values of SOCF are also fine-tuned around the values most literatures use.
The whole simulation time is 10s and our simulations are conducted under the computation environment of Variable-step, ode45 Solver. As it is illustrated in Figures 3 and 4, we can see that the trajectories controlled by ECBNN are successfully tracking the desired trajectories, the time of convergence is about 0.04s.

Position tracking diagram for joint 1.

Position tracking diagram of joint 2.
Comparison between traditional BSC and the proposed ECBNN controller.
In Figures 5 and 6, we can see that the control signal of BSC is not stable and there are many huge sudden jumps in it from time to time, which is leaded by the differential explosion problem. Yet ECBNN’s control signal is quite stable and regular, which means differential explosion problem is successfully solved by ECBNN controller.
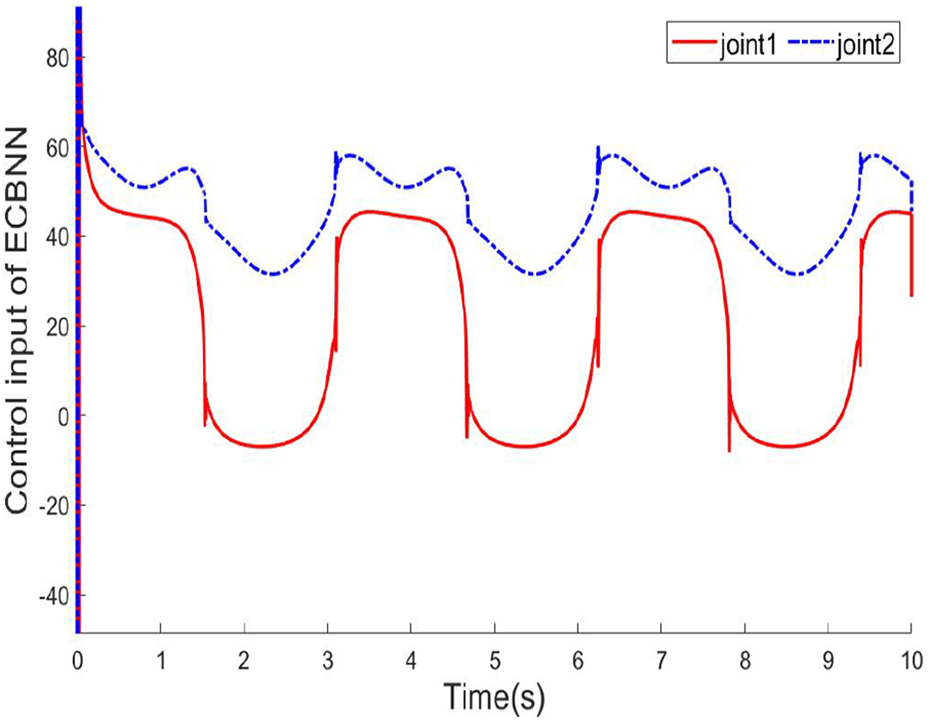
Control input from ECBNN. ECBNN: estimator and command filtering based adaptive neural network.

Control input from BSC. BSC: backstepping controller.
Comparison between FOCF in DSC and SOCF in ECBNN.
First, we use a simple function for testing the performance of FOCF and SOCF. We choose the function as

The comparison between FOCF and SOCF in filtering of xd . FOCF: first-order command filter; SOCF: second-order command filter.

The comparison between FOCF and SOCF in filtering of

Position tracking error diagram for joint 1.
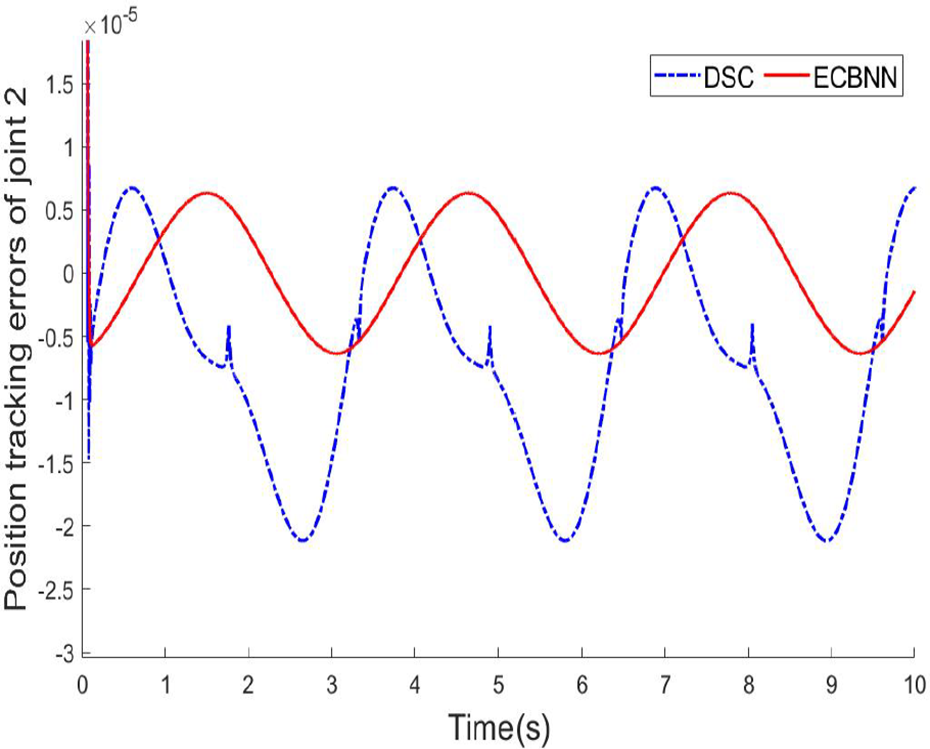
Position tracking error diagram for joint 2.
Comparison between traditional BSC with SOCF and ECBNN.
From the tracking error results in Figures 11 to 14, it is obvious that ECBNN is able to offer a smaller tracking errors and smoother tracking curves both in position tracking and velocity tracking than traditional BSC with SOCF because of the employment of ECM.

Position tracking error diagram for joint 1.

Position tracking error diagram for joint 2.

Velocity tracking error diagram for joint 1.
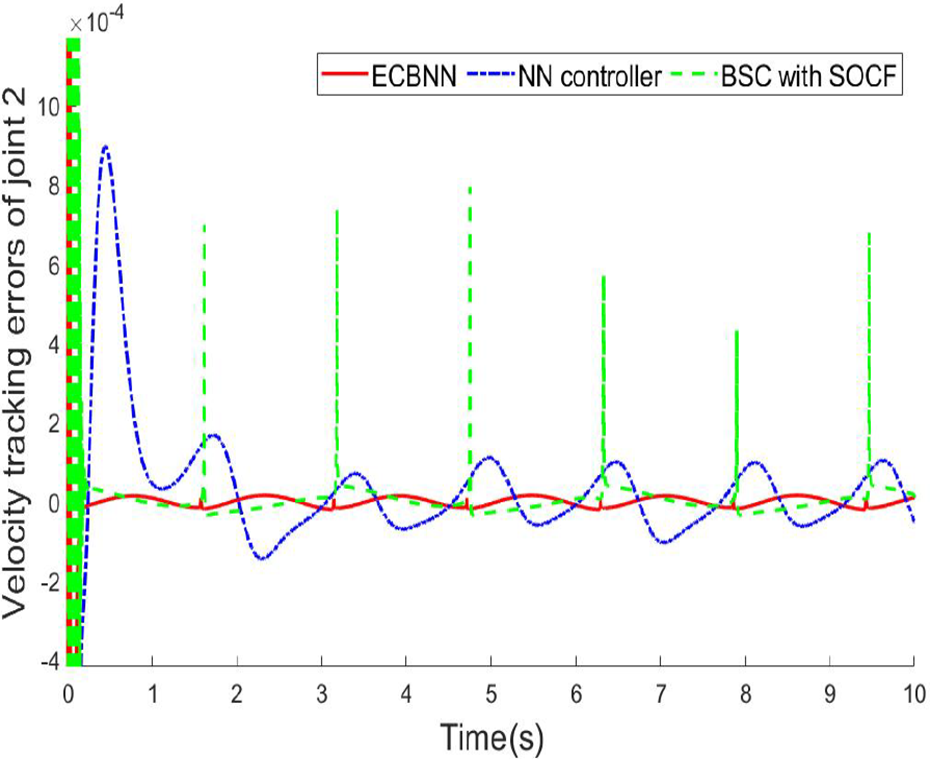
Velocity tracking error diagram for joint 2.
Comparison between NN controller and ECBNN.
According to Figures 11 and 12, we can see that the position tracking errors of NN controller are above or beneath zeros point from beginning to end and fail to cross it, which means the tracking errors of NN controller can’t converge. Yet the position tracking errors of ECBNN periodic cross zero point, which means error convergence is achieved by ECBNN for the utilization of OBE. From Figures 13 and 14, we can see that ECBNN provides smaller tracking errors of velocity than NN controller, which demonstrates the superiority of the introduction of OBE. The effect of the changes in control gain values on the controller tracking performance.
According to Figure 15, we can see that the tracking errors gradually increase as the gain values decrease. However, the tracking error values of the three parameter setting schemes generally remain in the same order of magnitude, which shows that the control performance of the proposed controller has strong robustness to the changes of control gain and does not change drastically due to the changes of control gain.
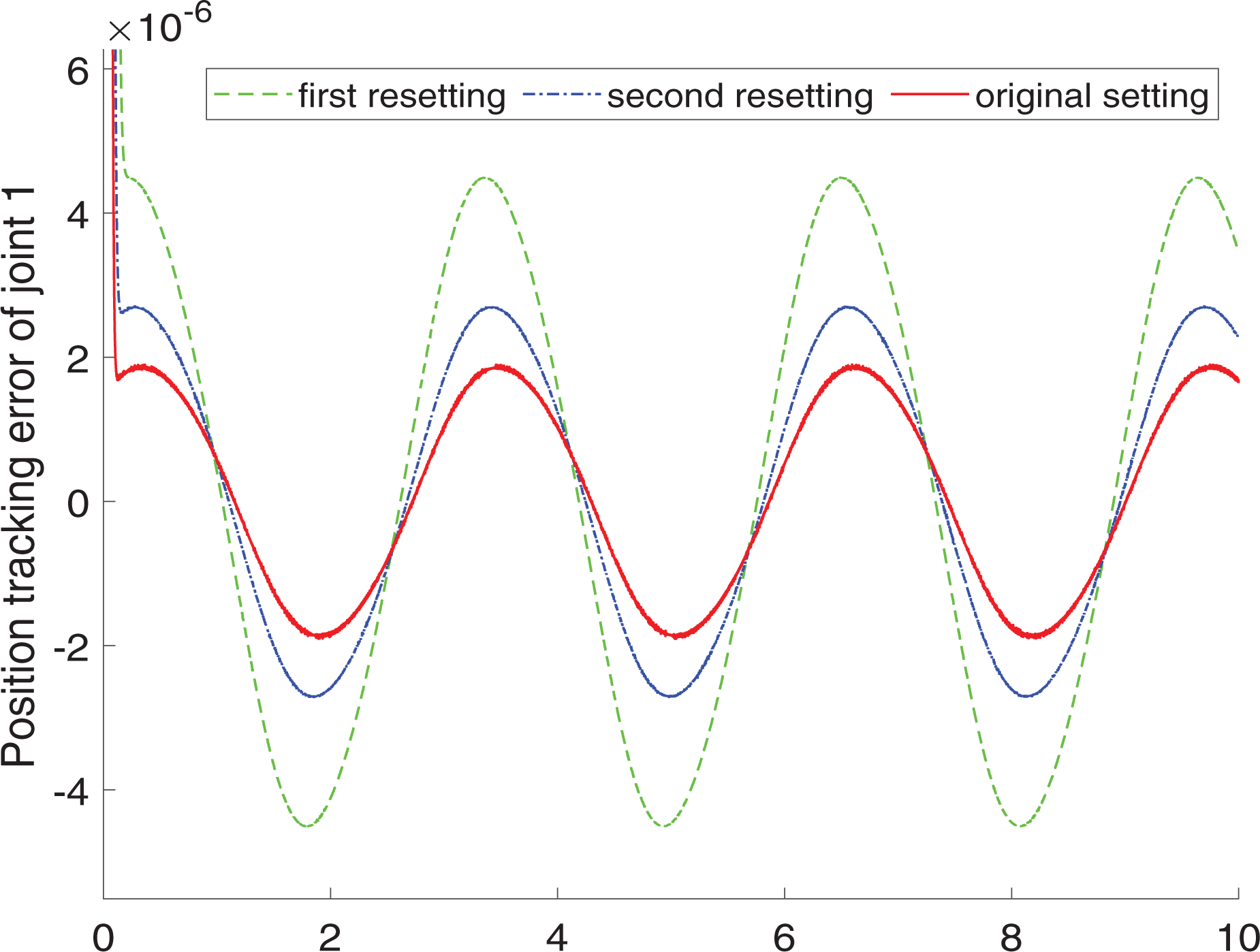
Comparison of tracking errors for different combinations of gain parameters.
The effect of variation of RBFNN parameter values on controller tracking performance.
According to Figure 16, we can see that smaller

Comparison of tracking errors for different combinations of RBFNN parameters. RBFNN: radial basis function neural network.
As can be seen in Figure 17, EBO is able to accurately estimate disturbances even in the presence of noise. Figure 18 demonstrates that RBFNN can have an effective estimation of the unknown term Q in the dynamic model (

Estimation results of OBE. OBE: observer-based estimator.

The estimation results of the neural network.
To illustrate the problem more intuitively, we introduce the average of errors (AE) for quantitative comparison and analysis. AE are specified as follows

where t 0 and tf are the initial time and the end time, respectively. The AE values of the position and velocity tracking errors of all the compared control strategies are, respectively, reported in Table 5 and 6. From the above table, it can be seen that the proposed controller has the smallest AE value in both position and velocity tracking errors compared to other methods. Besides, we present in Table 7 a collection of steady-state errors of position tracking for the abovementioned controllers. From Table 7, we can see that the steady-state error provided by the ECBNN is at least an order of magnitude smaller than that of the other controllers.
AE of position tracking.
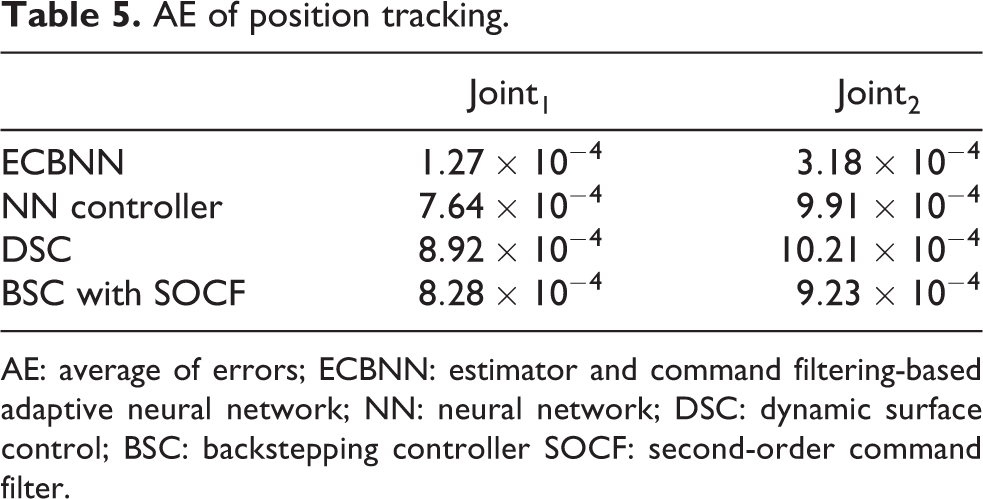
AE: average of errors; ECBNN: estimator and command filtering-based adaptive neural network; NN: neural network; DSC: dynamic surface control; BSC: backstepping controller SOCF: second-order command filter.
AE of velocity tracking.

AE: average of errors; ECBNN: estimator and command filtering-based adaptive neural network; NN: neural network; BSC: backstepping controller; SOCF: second-order command filter.
Steady-state error of position tracking.

ECBNN: estimator and command filtering-based adaptive neural network; NN: neural network; DSC: dynamic surface control; BSC: backstepping controller; SOCF: second-order command filter.
Conclusion and work in the future
In this article, a new robust ECBNN under the circumstance of system parameter uncertainty and disturbances is proposed for FJRM. Unlike the conventional DSC, this article substitutes the FOCF with an SOCF and constructs an ECM, thus improving the performance of the controller, solving the differential explosion problem, and compensating for the shortcomings of the new series of tracking errors arising from the employment of the command filter. Besides, a composite control strategy composed of NN and DO is proposed to reduce the dependence on robot parameters in controller design and to compensate for the estimation error of NN that cannot converge. Moreover, in DO part, a novel OBE is introduced to compensate the matched and mismatched disturbances in FJRM dynamic system, which makes estimation error asymptotically stable and broadens the range of utilization of the control law for the introduced OBE doesn’t require any prior knowledge about the bounds of the disturbances. Beyond these, to be more practical, the dynamic model of FJRM in this article is improved by taking the dynamic of DC motor into consideration, which introduces more unknowns and increases the dimensionality of the model; output constraint of FJRM is designed as well for the reason of using security. By means of Lyapunov’s theorem, we prove that ECBNN can ensure the system’s stability. Finally, simulations are performed and the outcomes confirmed the effectiveness of ECBNN. From the simulation results, we can see ECBNN provides the smallest average of errors in both position and velocity tracking and its steady-state error of position tracking is at least one order of magnitude smaller than that of the other controllers.
In future research, we will consider the combination of SMC technique and backstepping control technique to further improve the convergence speed and will consider the application of a predefined performance function to limit the range of tracking error.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (51765042 and 61963062).