
Abstract
This article addresses the problem of three-dimensional path following control for underactuated autonomous underwater vehicles in the presence of ocean current. Firstly, three-dimensional path following error model was established based on virtual guidance method. The control law is developed by building virtual velocity errors and backstepping method, which can simplify the virtual control input and avoid the singular problem induced by initial state constraints. Considering the curvature and torsion characteristics of the three-dimensional desired path, the approaching angle is introduced to guarantee fast convergence of error. Nonlinear damping term is introduced to offset the effects of dynamic uncertainties and external disturbances. The controller stability was proved by Lyapunov stable theory. Finally, simulations were conducted and the results indicate the effectiveness and robustness to parameter uncertainties and external disturbances of the proposed approach.
Introduction
In recent years, autonomous underwater vehicles (AUVs) are employed in a wide range of civilian and military applications, such as long-duration oceanographic sampling, 1,2 detection and localization of pollutant sources and undersea mines, 3,4 mine clearance, 5 region search for deep-sea wrecks, and so on. 6,7 To achieve those tasks, AUVs need the ability of accurate tracking control. 5,6 In order to reduce the vehicle’s weight and cost, save energy consumption, and improve system reliability, it is usually designed to be an underactuated AUV which can achieve the same control effects as a fully actuated AUV with less control inputs. Moreover, a full actuated AUV with actuator failures can be defined as an underactuated one which might be still controlled with an underactuated control scheme. There are not lateral and vertical thrusters for most underactuated AUVs, and only surge velocity, yaw angular velocity, and pitch angular velocity can be controlled directly. Therefore, the underactuated AUV control is much more difficult than the fully actuated AUV control. 8
Many researchers have focused on the path following control design for the underactuated AUV and developed some significant results. Approaches on the line-of-sight (LOS) guidance principle are proposed on horizontal path following for underactuated AUVs and marine vehicles. 7 –10 Moreover, an integral LOS guidance is introduced for path following of the underactuated AUV in the presence of ocean currents. 9 The adaptive robust control and new finite-time disturbance observer are established for trajectory tracking for marine vehicles with unknown disturbances. 11 The direct adaptive fuzzy tracking control scheme with fully unknown parametric dynamics for marine vehicles to deal with uncertainties and unknown disturbances is proposed in the studies by Wang and Er 12 and Wang et al. 13 The neural network and dynamic surface control technique and neurodynamics-based output feedback scheme are proposed in the presence of uncertainties and ocean disturbances. 14 –16 Backstepping method has been applied successfully for the path following control of the underactuated AUVs. 17,18 To avoid the explosion of complexity in backstepping design which is caused by differentiation at each step, researchers have proposed some methods to eliminate the problem in some studies. 19 –24 In addition, a nonlinear iterative sliding mode control method was presented for path following of underactuated AUVs. 25 However, much work on path following control of underactuated AUVs has been done in the horizontal plane and vertical plane, respectively, that is, the three-dimensional (3-D) motion model of the underactuated AUV is decoupled into two plane models and the path following controllers are designed, respectively. Due to ignoring the model coupling effects among different degrees of freedom (DOFs), the controllers on decoupling model design cannot achieve accurate 3-D path following for underactuated AUVs. Therefore, to build the 3-D path following error model and design 3-D path following controller have been the key research for AUV motion control.
Tian 26 decomposed the 3-D path following controller of the underactuated AUV into path following guidance function design and the PID controller design and utilized fuzzy logic theory to improve the guidance function. But the control effects of PID controller are unsatisfactory to system nonlinearity and lack of robustness to external disturbances. Zhou et al. 27 designed three adaptive neural network controllers based on Lyapunov stability theorem to estimate uncertain parameters of the AUV model and unknown current disturbances. These controllers were designed to guarantee that all the error states in the path following system are asymptotically stable. Lapierre and Jouvencel 28 designed a kinematic controller to deal with vehicle dynamics based on backstepping and Lyapunov-based techniques. Borhaug and Pettresen 29 applied cascade system theory and backstepping method to design controllers based on LOS, which can simplify the form of controllers but not discuss path following problem for general desired path. A nonlinear iterative sliding mode controller based on engineering decoupling was designed in the study by Jia et al. 30 to resist the model parameter perturbation and current disturbances, which can only guarantee asymptotic stability of the subsystem but the whole control system. Virtual control variable through the state error model is introduced to compensate nonlinear effects of the model, 31 and the feedback gain is introduced to avoid the problem of high-order derivative for virtual variable. To sum up, the path following control methods for underactuated AUVs have been discussed during the past decade. However, the problems of external disturbances and uncertainty of AUV models have not been investigated thoroughly. 32
Motivated by the above observation, this article investigates the path following control design for the underactuated AUV in the presence of ocean currents. Considering the effect of unknown modeling during AUV actual operations and current disturbances, we establish the 3-D path following error model based on virtual guidance method firstly, then we design the control laws combined backstepping and damping methods according to the curvature and torsion characteristics of the desired path, 33 which make AUV follow the desired path from any position and guarantee that all state variables converge to the desired value. The impact of dynamic uncertainty and external disturbances is offset by damping term. 34 Stability analysis for the whole control system is performed based on Lyapunov stability theorem, and simulations are conducted to verify the feasibility and robustness to external disturbances.
Problem formulation
AUV dynamic model
The AUV dynamic model in 3-D space is proposed in this section. Assume that the AUV center of gravity is the origin of the kinetic coordinate system and ignore the effects of AUV rolling due to its good symmetrical structure. Therefore, 6-DOF model can be simplified into 5-DOF model. 35
The AUV dynamic equation is

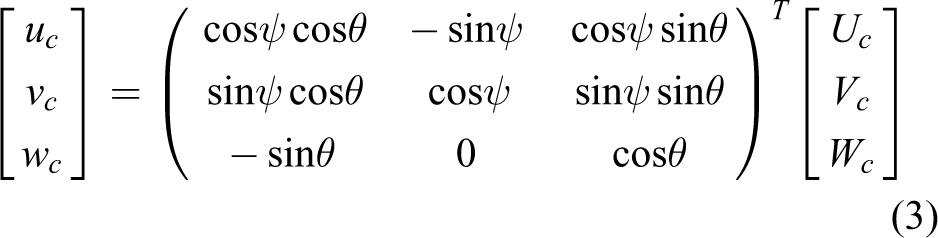
The AUV kinematic equation is

where
where
Path following error model
In Figure 1, the desired path is the spatial curve described by design parameters. {E}, {B}, and {F} represent the geodetic coordinate system, kinetic coordinate system, and Serret–Frenet coordinate frame, respectively.


Diagram of 3-D path following of AUV. 3-D: three-dimensional; AUV: autonomous underwater vehicle.
With

Then

where
The matrix form is
So the AUV dynamic model in 3-D space is


where α and β are the attack angle and drift angle of AUV, respectively.

Controller design
Backstepping is to construct Lyapunov function through iterative recursion to get the input of the system, and it is usually presented to deal with the robust control of nonlinear system. 36 In this article, we design the spatial path following controller of the underactuated AUV based on damping backstepping. 34
Consider the following uncertain nonlinear system

Assume that there is a continuous feedback control law ξ = α(x), α(0) = 0 and positive definite unbounded function V and semi positive definite function W.

Then the stable input of the closed-loop system is as follows 37

Pitch and yaw controller
To describe the AUV transient motion approaching to the desired path, the approaching angle 38 is introduced to represent the desired values of yaw angle error and pitch angle error designed as

The goal is to follow the desired path by the guidance laws based on damping backstepping for the underactuated AUV, which makes θe and ψe converge to δθ and δψ, respectively. To follow the desired path, we define the following error 35

Differentiate

Then

where
Define the following error

within

Thus,

where
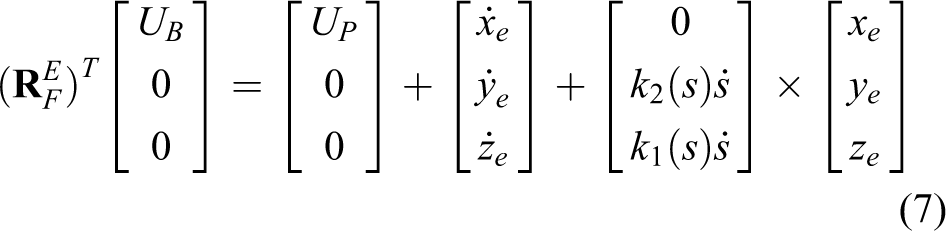
Furthermore, we get equation (21) from equations (18) and (1)

within
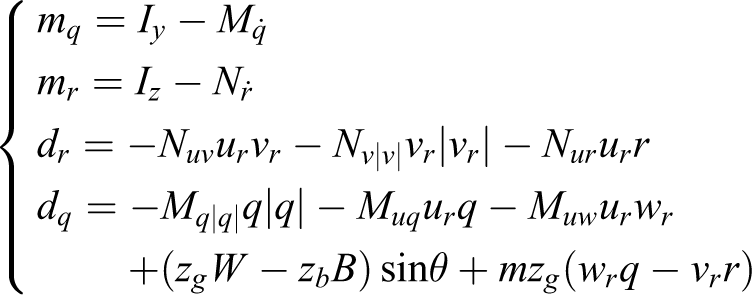
where Iy and Iz are the moments of inertia. X(⋅), Y(⋅), Z(⋅), M(⋅), and N(⋅) represent the AUV hydrodynamic coefficients.
Finally, we get the control laws as follows

where
Then

Note that qd and rd are virtual control variables, and the controller is designed based on backstepping. For the dynamic uncertainty, the value is bounded but not measurable, so the nonlinear damping term is introduced to offset the disturbances. We get

where β1 = q − qd, β2 = r − r d , and P1 and P2 are positive constants.
Consider Lyapunov function

Differentiate V1 with respect to time yields

where
Surge velocity controller
Define the following error

Consider Lyapunov function

Differentiate V2 with respect to time yields

To make the following error converge asymptotically, we select

where λ is a positive constant.
Nonlinear damping term defined as

where β3 = u − ud and P3 is a positive constant.
Stability analysis
Considering the 3-D continuous differential bounded desired path and the 3-D path following error model, we investigate dynamic controllers using backstepping method and virtual guiding speed designed by Lyapunov stability theorem. For the stability analysis of kinematics under current disturbances, we consider the following Lyapunov function

Differentiate V3 with respect to time yields

Then

Select virtual control variable

where c3 is a positive constant to be determined and s represents desired path parameters.
Substitute equation (50) into equation (49), we get

Note that

Consider the following Lyapunov function for the closed-loop system

Differentiate V4 with respect to time yields
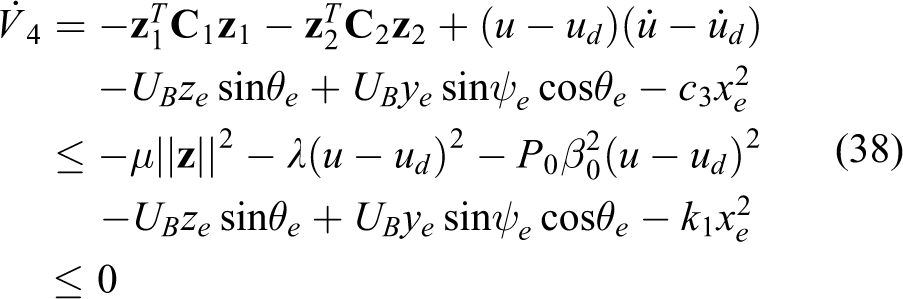
It can be then concluded that the designed control laws based on damping backstepping can guarantee the whole control system steady.
Simulation
In this section, to verify the feasibility and robustness of the path following controller proposed in this article, we conduct simulations on the underactuated AUV WL-II (Figure 6) developed by Harbin Engineering University in China. 8 The model is represented using equation (1) and detailed parameters can be found in the studies by Liang et al. 40,41
Firstly, the 3-D desired path is defined as a spiral in the following form

Then, the initial position and attitude angle of AUV are

In deep sea, the current is assumed irrotational and constant (or slowly changing), so the current disturbances in this article can be defined as fixed value and the current velocities are chosen as
To verify the performance of the controller design in this article, we compare and analyze the simulation results of AUV path following control using damping backstepping with traditional backstepping.
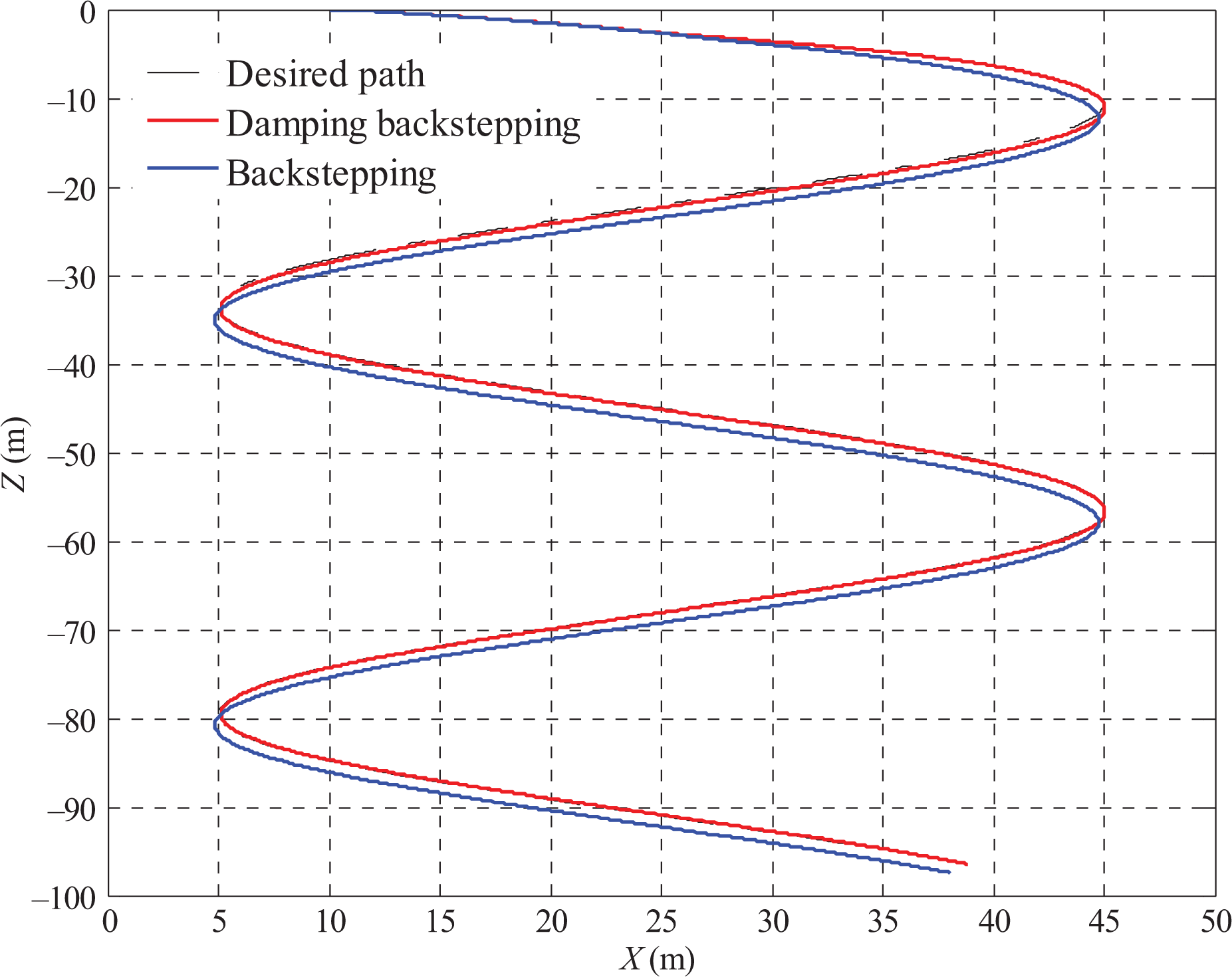
The simulation results are shown in Figures 2 to 9. Figure 2 shows the path following of AUV in 3-D space in the presence of current disturbances, and Figures 3 and 4 are the projection curves on the horizontal and vertical plane, respectively. As can be seen, the proposed controller based on virtual guiding speed and damping backstepping method shows its high performance, and the AUV trajectory can converge on the desired spatial path precisely compared to the traditional backstepping. Furthermore, the following errors converge faster using damping backstepping than traditional backstepping from Figure 5. Compared with the traditional backstepping, Figure 7, 8 and 9 can be clearly seen that the damping backstepping control method has better ability and stronger robustness of current disturbances and bounded dynamic uncertainty. In addition, the AUV control force and moments are relatively stable without chattering under the damping backstepping control and the effectiveness of the proposed control method is verified.

3-D path following of AUV. 3-D: three-dimensional; AUV: autonomous underwater vehicle.

Vertical projection for 3-D path following of AUV. 3-D: three-dimensional; AUV: autonomous underwater vehicle.
Horizontal projection for 3-D path following of AUV. 3-D: three-dimensional; AUV: autonomous underwater vehicle.

Path following errors of AUV. AUV: autonomous underwater vehicle.

WL-II underactuated AUV. AUV: autonomous underwater vehicle.

Velocity response of AUV. AUV: autonomous underwater vehicle.
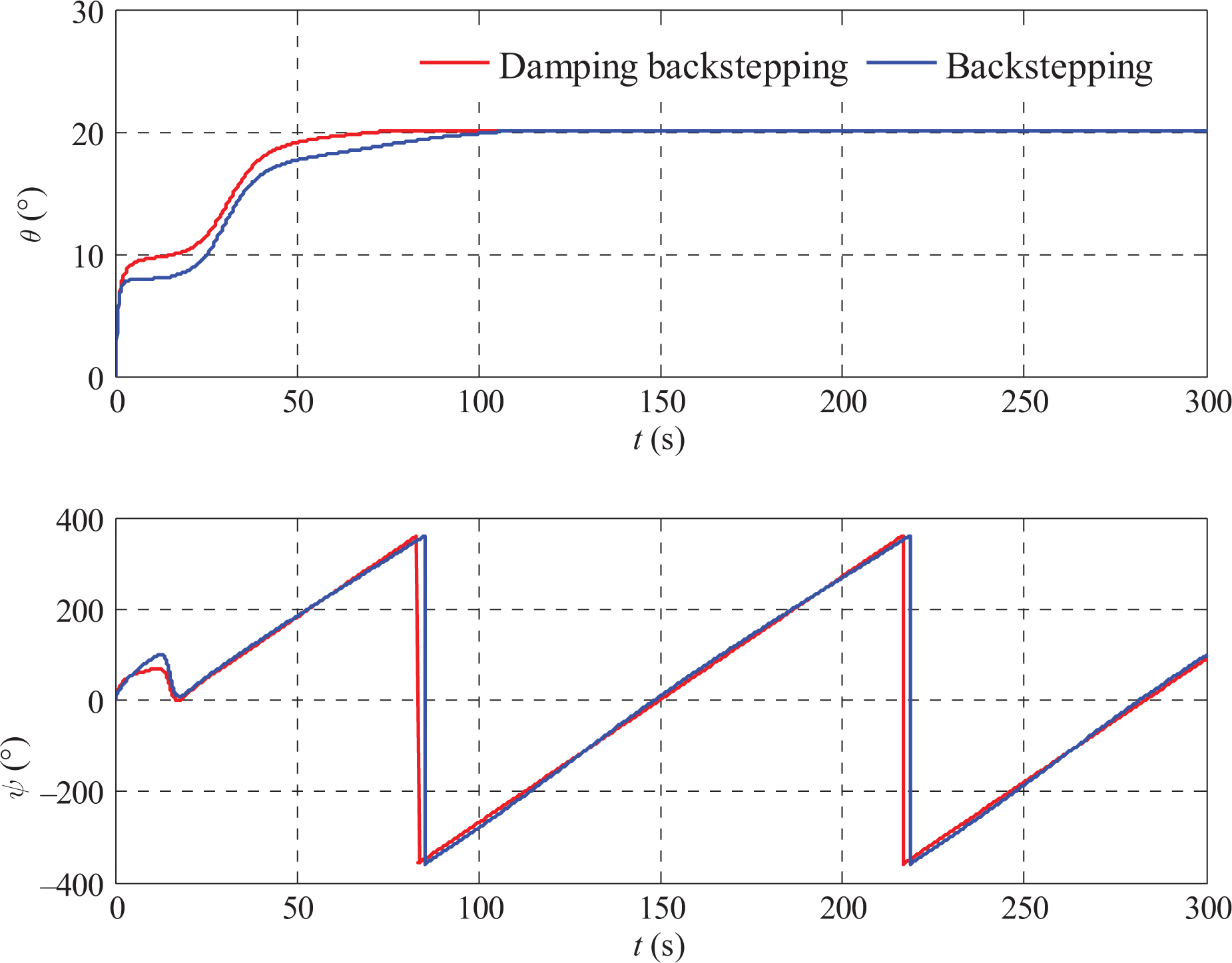
Angle response of AUV. AUV: autonomous underwater vehicle.

Control force and moments of AUV. AUV: autonomous underwater vehicle.
Conclusion
This article considers the problems of 3-D path following for the underactuated AUV in the presence of current disturbances. Path following error model of AUV in Serret–Frenet coordinate frame is established, and the virtual guiding speed is designed based on Lyapunov stability theory and backstepping to make the AUV follow the desired path and guarantee the closed-loop control system to converge finally. Moreover, we simplify the virtual variable design of the controller, which can avoid the singular value problems of the traditional backstepping in solving the controller and dynamic model. Nonlinear damping function is introduced to offset the effects of dynamic uncertainty and current disturbances. Considering the curvature and torsion of the following curve, the approaching angle is introduced to guarantee fast convergence of error. Simulation results show that the 3-D path following controller for underactuated AUVs proposed in this article is effective and robust to current disturbances greatly, which indicates high accurate tracking capacity and good robustness.
Future research will address the extension of these results, and path following controller based on nonlinear current observer should be developed to reconstruct the velocities based on kinematic and dynamic models, so the disturbances can be counteracted in the controller. Thus, how to design disturbance control law effectively for constant unknown current disturbances is the key work to achieve AUV precise path following control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant numbers 51579022, 51579023, and 51609030), Fundamental Research Funds for the Central Universities of China (grant numbers 3132016313, 3132016339, 3132016316, and 3132017017), and the National Key Technology R&D Program (grant number 2013BAC06B00).