
Abstract
This paper addresses the path following problem of an underactuated autonomous underwater vehicle (AUV) with the aim of dealing with parameter uncertainties and current disturbances. An adaptive robust control system was proposed by employing fuzzy logic, backstepping and sliding mode control theory. Fuzzy logic theory is adopted to approximate unknown system function, and the controller was designed by combining sliding mode control with backstepping thought. Firstly, the longitudinal speed was controlled, then the yaw angle was made as input of path following error to design the calm function and the change rate of path parameters. The controller stability was proved by Lyapunov stable theory. Simulation and outfield tests were conducted and the results showed that the controller is of excellent adaptability and robustness in the presence of parameter uncertainties and external disturbances. It is also shown to be able to avoid the chattering of AUV actuators.
1. Introduction
The autonomous underwater vehicle (AUV) plays an important role in the exploration of ocean resource and military affairs [1–4]. To achieve these tasks, the AUV needs the ability of accurate path following [5–6]. The paths are described by curve parameters which are usually not relevant to time. There are not lateral and vertical thrusters for most AUVs, and only longitudinal speed, yawing and pitching angle speed are controlled directly. Therefore, the AUV is a typical underactuated system which makes path following more difficult.
The path following problem of an underactuated AUV has been addressed in a large number of publications. Approaches based on the Line-of-Sight (LOS) guidance principle are very popular, by which horizontal path following in two dimensions (2D) of underactuated marine vessels was achieved in [7–8]. Moreover, Walter Caharija [9] introduced an integral LOS guidance for path following controller of underactuated AUVs in the presence of ocean currents. Advanced nonlinear control techniques were adopted in [10] to control the yaw rate of an underactuated marine vessel and hold a desired course. Yu Jiancheng [11] conducted horizontal path following experiments by direct adaptive control method based on neural network. Tang Xudong [12] put forward a process neuron control model. Repoulias Filoktimon [13] designed a horizontal path following controller based on Lyapunov stability theorem and backstepping method. Xiao Liang [14] proposed a novel method based on Lyapunov stability theorem and feedback gain backstepping to reduce the complexity of controller and improve adjustability of the controller parameters. Zaopeng Dong [15] proposed a state feedback based backstepping control algorithm to address the horizontal path following problem of an underactuated marine vessel. Jian Gao [16] proposed a global path following method for the AUV based on the same coordinates to achieve global asymptotic stability of the following error. Zhou et al. [17] designed three adaptive neural network controllers which are based on the Lyapunov stability theorem to estimate uncertain parameters of the vehicle's model and unknown current disturbances. These controllers are designed to guarantee that all the error states in the path following system are asymptotically stable. Lapierre [18] designed a kinematic controller and extended it to cope with vehicle dynamics by resorting to backstepping and Lyapunov-based techniques. As mentioned above, the control algorithms for AUVs have been advanced significantly. However, when it comes to solve the disturbance problems of exterior interfere and uncertain model of AUV, the above control algorithm is incapable of achieving high performance [19].
In recent years, fuzzy modeling and control algorithm have obtained a rapid development and applied to practice due of its function approximation ability [20–22]. Backstepping technology has obtained widespread application in AUV motion control [14,15]. To avoid the explosion of complexity in backstepping design which is caused by differentiation at each step, researchers have proposed some methods to eliminate the problem in some studies [23–25]. In this paper, we propose to adopt fuzzy backstepping sliding mode control to solve the problems of nonlinearity, uncertainties and external disturbances in the horizontal path following of underactuated AUVs. Firstly, we adopt fuzzy logic system to approximate unknown nonlinear function in the AUV model and fuzzy method to serialize the switching items of sliding mode controller to reduce the chattering of AUV actuators. Then, the system stability is proved by Lyapunov stable theory. Finally, simulation and outfield tests are conducted to verify the feasibility and superiority of the novel approach.
2. Problem Description
For ease of problem description, this paper establishes two kinds of coordinate system according to the glossary of ITTC and SNAME, fixed coordinate system
 This paper only considers path following in the horizontal plane, so heave, roll, and trim are ignored. The AUV kinematic equations in horizontal plane can be expressed as
This paper only considers path following in the horizontal plane, so heave, roll, and trim are ignored. The AUV kinematic equations in horizontal plane can be expressed as

The AUV dynamic equations can be expressed as
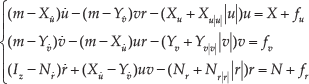
where m is the weight of the AUV, and Iz is the moment of inertia around z axis. X{•}, Y{•} and N{•} represent the AUV hydrodynamic coefficients. f{•} is unknown disturbances assuming |f{•}|≤F{•}. X is the longitudinal thrust provided by tail propellers of AUV. N is the torque around z axis produced under the joint action of thrusters and rudders.
The AUV is a complex nonlinear dynamic system and its dynamic model precision can be affected by external disturbances and load change. (2) are simplified equations which ignore higher-order hydrodynamic coefficients, so the horizontal kinematic equations based on (2) are not precise. However, they can be used as nominal model in simulation. Without affecting the generality, the horizontal kinematic equations of AUV can be expressed as

where
The path curve is described by parameter s and the reference point P(ξ(s), η(s)) is determined by s only. The moving speed of point
The included angle between ξsf axis and ξ axis is


Diagram of AUV path following
The kinematic equations of path following error can be expressed as

where ψe is the following error of yaw angle, ψe =ψ–ψp. Therefore, the problem discussed in this paper can be described as: In the presence of model uncertainty and external disturbances, we set the path Ω to follow and the desired longitudinal motion speed ud according to the kinematic and dynamic model of the AUV. The AUV seeks for longitudinal force X, turning stem torque N and the changing rate of curve parameter s from any initial position. In this way, we expect the following error

3. Fuzzy Backstepping Sliding Mode Control
Consider the n order nonlinear controlled object
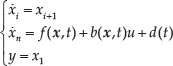
where f(
3.1. Controller design
The controller is designed into three parts: the first is backstepping algorithm, and the second is sliding mode control, and the third is fuzzy logic system.
The first step:
Define following error

then

Define virtual control value

where k1>0.
Define


then

Substitute (9) into (12) and we can obtain

The second step:
Define Lyapunov function

then

Define virtual control value

where
Define

then

The n–1 step:

where
The n step: Considering the strong robustness of sliding mode control, we can modify the backstepping algorithm and introduce sliding mode control in the last step of backstepping. Then the sliding mode surface can be designed as follows.

Select constant c1,c2…cn–1 and make polynomial P(p)=p( n −1)+cn–1 p( n −2) +…+c2p+c1 as Hurwitz stability, and p is Laplace operator.
Define Lyapunov function

then

If f(

where h is a positive constant.
Control law (23) is not applicable when f(
We will use product inference engine, single value fuzzy unit and center average defuzzifier to design fuzzy logic systems. The output of system [27] is
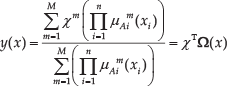
where

where

3.2. Stability proving
Define optimal parameters:

where Φ
f
, Φ
b
and Φ
d
are the collections of
Define minimum approximation error:

According to universal approximation theorem, there are small positive number ε1, ε2 and ε3 satisfying the following conditions,

There are small positive number εmax AND γ satisfy

Substitute (25) and (28) into (22), we can obtain

where
Define Lyapunov function

then

where
Substitute (26) into (33), we can obtain

take
As
(34) can be rewriten as

Because γ is a small positive constant, there is β≥γ satisfying
4. Design of Path Following Controller of the AUV
4.1. Longitudinal speed controller
According to (25), longitudinal speed controller can be designed as follows,

where
S1=u–ud, the corresponding membership function is selected as

where m=1,2…5, but

where m=1,2,3.
There are 125 fuzzy rules that can be used to approximate f1(

To make the following error of longitudinal speed convergent, we can select the value of h1 to make |
4.2. Yaw angle controller
Control the yaw angle and the longitudinal speed simultaneously. Define sideslip angle relative to longitudinal speed βd=arctan(v/u), then (5) can be rewritten into
where
Design calm function as
Define

where z1=ψ–ψd,
The corresponding membership function of

where m=1,2…5, and

where m=1,2,3.
Thus, there are 125 fuzzy rules that can be used to approximate f3(

To make the following error of yaw angle convergent, we can select the value of h2, c1 and k1 to make |
4.3. Stability analysis
If

Define Lyapunov function

Select the moving speed UP =Ud+kττe of point
then

Make control parameter

5. Simulation
To verify the feasibility of fuzzy backstepping sliding mode controller proposed in this paper, we conduct simulation research for an underactuated AUV WL-II developed by Harbin Engineering University in China [28–30].

WL-II underactuated AUV
The initial values of parameter estimations
The original state of AUV is ξB(0)=0, η(0)=10m, u(0)=0.05m/s, v(0)=r(0)=ψ(0)=0 and the desired speed of AUV is ud=1m/s. Choose straight line and circle respectively as following path by using the control parameters in Table 1. To verify the robustness of controller, we set the parameters to be 1.2 times of the nominal value, then take it as the controlled object. We also assume that the AUV is affected by white noise disturbances which have the largest amplitude of ω=5(N/N m). To verify the performance of the controller designed in this paper, we compare and analyze the simulation results of AUV path following through PID control system. What needs to be pointed out that the path following error in Figure 3 and 7 is
Control parameters of AUV path following

The parameter equation Ω of straight path is

Straight path following
Path following errors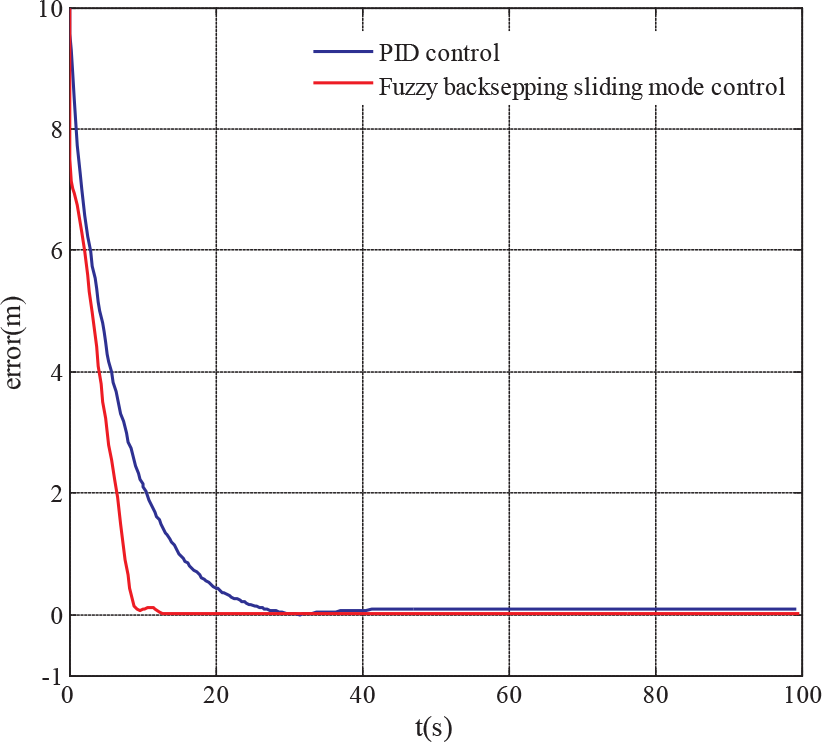
Longitudinal speed following
Longitudinal force and turn torque
The parameter equation Ω of circle path is

Circle path following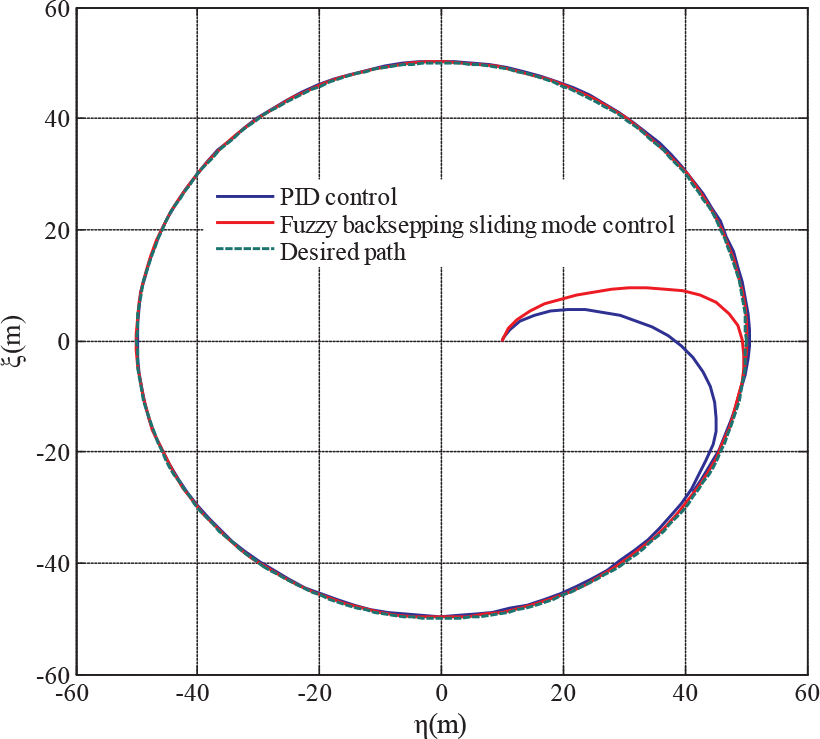
Path following errors
Longitudinal speed following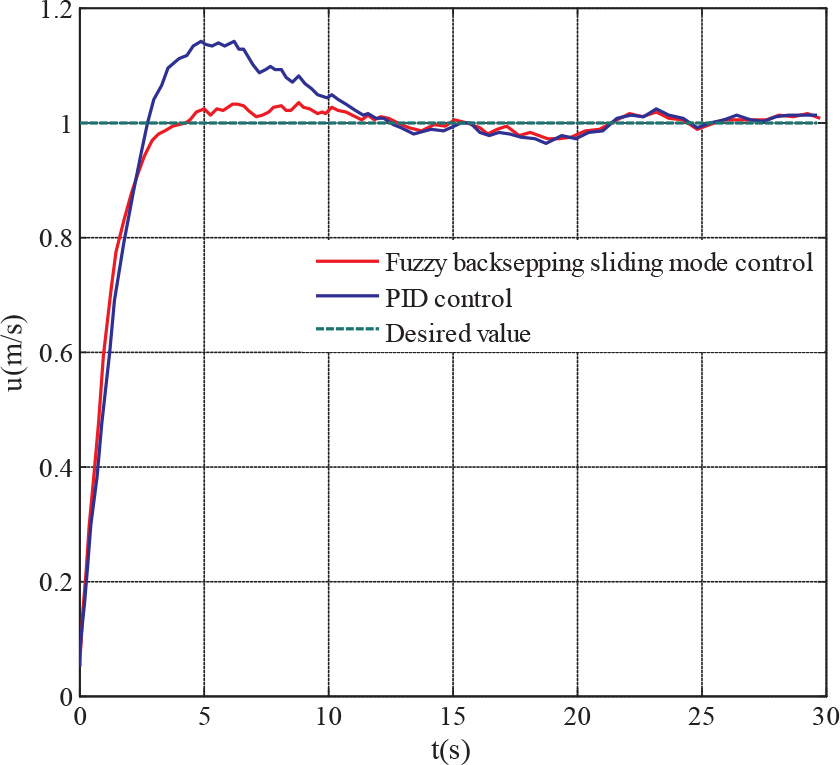
Longitudinal force and turn torque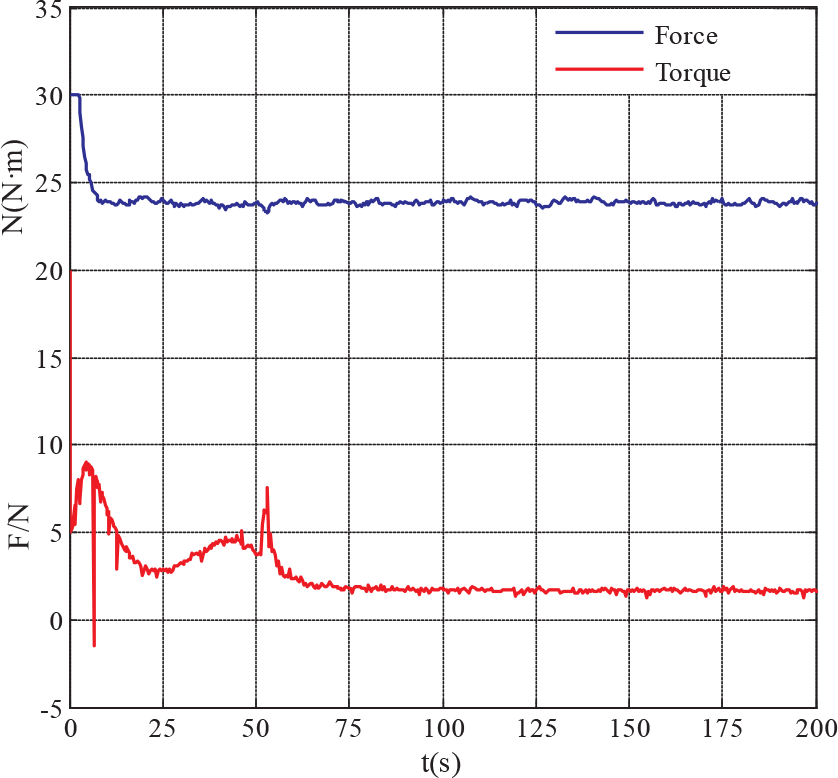
As shown in Figure 2 to 9, in the presence of model perturbation and unknown disturbances, both controllers can achieve straight and circle path following of underactuated AUV. However, As can be seen from Figure 3 and 7, the path following error based on fuzzy backstepping sliding mode control converges obviously faster than that under PID control. There is steady-state error in path following under PID control, But the path following error under fuzzy backstepping sliding mode control eventually converges to 0, which indicates the fuzzy backstepping sliding mode controller is of strong robustness. As can be seen from Figure 4 and 8, the longitudinal speed control in PID controller has an overshoot at about 10%, but fuzzy backstepping sliding mode controller can control the longitudinal speed of underactuated AUV fast, gently and without overshoot. As shown in Figure 5 and 9, actuator can continuously output and the fuzzy backstepping sliding mode controller doesn't show chattering phenomenon which usually happens.
To verify the feasibility of the approach further, outfield test is conducted on WL-II AUV in Hilongjiang River, China. The result show that the AUV can follow the reference path exactly enough, as shown in Figure 10.

Outfield test result of path following of WL-II AUV
In conclusion, the fuzzy backstepping sliding mode controller designed in this paper can make longitudinal speed of AUV converge to desired speed fast and without overshoot. The results show that the controller has following advantages:
It has good rapidity, that is the AUV can quickly follow the desired path.
It doesn′t need precise mathematical model of AUV and is not sensitive to uncertainties like model perturbation and external disturbances.
For different following paths, it can use the same control parameters and has good adaptability and strong robustness.
6. Conclusion
This paper considered the problems of path following for the underactuated autonomous underwater vehicle (AUV) in the presence of parameter uncertainties and external current disturbances. Considering kinematic and dynamic equations of AUV, we designed a fuzzy backstepping sliding mode controller which can not only restrain external unknown disturbances, but also avoid the chattering of AUV actuators. This paper theoretically proved the feasibility of the designed controller. Further work is to conduct an extension from horizontal path following to three dimensional space description.
Footnotes
7. Acknowledgements
This work is supported by the National Natural Science Foundation of China (Grant No. 51579022, 51579023, 51209025, 51379026) and Fundamental Research Funds for the Central Universities of China (Grant No. 3132016215, 3132015083).