
Abstract
This article presents a design method for the three-dimensional trajectory tracking control of an underactuated autonomous underwater vehicle with unknown current disturbances. To simplify the complexity of the controller and avoid the singular problem induced by initial state constraints, a novel nonlinear backstepping technique based on virtual control variables is employed to design the kinematics and dynamics controllers. The control law is developed by building virtual errors, which can solve the problem of differential explosion in the traditional backstepping. Specifically, an ocean current observer based on the kinematics model is proposed to estimate unknown current disturbances, where the estimation is integrated into the autonomous underwater vehicle kinematics and dynamics equations. The convergence of tracking errors and system stability are proven by using Lyapunov stable theory. Finally, the simulation studies were provided to illustrate the effectiveness and good performance of the above trajectory tracking strategy.
Introduction
The autonomous underwater vehicle (AUV) is one of the most modern and widespread equipment in the naval sector across the world, 1 since AUVs could be employed in various settings such as military applications, mineral resources sampling, gas operations, and recovery of lost artificial objects. 2,3 The complex missions require AUVs to track an inertial trajectory (a reference curve with time-varying), which is concerned with the design of control laws that guide and keep the vehicle on the reference trajectory. For underactuated vehicles, whose independent control inputs are less than six degrees of freedom (DOFs) to be controlled, the trajectory tracking control is still a popular and valuable research topic. 4,5
Many researchers have focused on the trajectory tracking control for underactuated AUVs and marine vehicles, which developed some significant results. With the development of advanced control method, including sliding mode control, 6,7 adaptive fuzzy control, 8 –10 neural network control, 11 model predictive control 12,13 and so on, promising control strategies are pursued ceaselessly. Further research has been reported in the study by Qu et al., 14 where the issue of unmanned surface ships with disturbance and system uncertainty is discussed in detail and an estimate-based backstepping controller is presented. Recently, Wang et al. 15 proposed self-organizing fuzzy neural control schemes by virtue of Lyapunov synthesis and backstepping technique for tracking unmanned surface vehicle (USV), whereby complex unknowns with fast dynamics can be sufficiently tackled. In case of realizing finite-time converge of the tracking error dynamics and disturbance identification, the finite-time tracking control scheme and disturbance observer are constructed, and results demonstrate remarkable performance and superiority of the proposed controller in terms of both tracking accuracy and robustness. 16,17 In addition, to track both curve and straight line with high accuracy, a nonlinear three DOFs underactuated dynamic model for USV is proposed, and control law is employed as the well-known persistent exciting conditions that yaw velocity is completely relaxed. 18 Trajectory tracking control schemes are designed for the underactuated AUV lateral motion using the concepts of terminal sliding mode control under bounded disturbances. 19 To challenge difficulty in tracking an uncertain marine vehicle with unknown dynamics and disturbances, an adaptive universe-based fuzzy controller with retractable fuzzy partitioning in global universe of discourse is employed to guarantee global asymptotic model-free trajectory-independent tracking. 20 Furthermore, an innovative adaptive approximation-based regulation control is developed for a general class of uncertain nonlinear systems. 21 And the problems of cascade constraints and unknown sideslip angles have been investigated by using backpropagating constraint-based virtual controls 22 and finite-time sideslip observer, 23 respectively. Yu et al. 24 focused on vertical-plane trajectory tracking of the underactuated AUV subject to saturation and disturbances and applied the line of sight guidance law to trajectory tracking, which transforms the depth tracking errors into the elevation angle tracking errors. A standard stabilizing nonlinear model predictive control-based approach augmented with an economic cost function is employed to steer the system through highly observable trajectories. 13
However, much of the early work in this sector is related to the horizontal plane, that is, the six DOFs motion of the underactuated AUV is decoupled into three DOFs motion, and then the trajectory tracking controllers are designed. Actually, for most AUVs, they do undertake the task of tracking a three-dimensional (3-D) trajectory. Therefore, a complete 3-D trajectory tracking strategy has been the key research for the AUV motion control. Based on the Lyapunov direct method and backstepping technique, 25 an adaptive controller is proposed, and the likelihood of actuators’ saturation is considered for an underactuated AUV in six DOFs, which interestingly guarantees robustness against parameter uncertainties and bounded signals using saturation function. 26 The control strategy is developed using Port-Hamiltonian theory and interconnection and damping assignment passivity-based control in the study by Valentinis et al., 27 and the trajectory of a virtual fully actuated plant is guided onto a vector field using energy routing. Moreover, the system kinematics error dynamics and the controller based on defining virtual velocity errors in the presence of constant environmental disturbances are constructed. 28 The derivative output value of the bioinspired model is used to replace the real-time derivation of virtual control variables in backstepping, which addresses the problem of differential explosion in backstepping method and reduces the complexity in dynamics controller, but the above techniques have not considered that current disturbances would cause influences on the controller design. 29
Motivated by the above observations, this article considers the 3-D trajectory tracking problems for the underactuated AUV in the presence of unknown current disturbances. A novel nonlinear backstepping technique is developed for dynamics controller design, where the AUV managed to be controlled in five DOFs. Besides, the virtual speed variables based on kinematics equations are employed here to avoid the singular problem by initial state constraints, which simplify the virtual control input compared to the traditional backstepping. The current disturbances are considered, which is accurately identified using ocean current observer based on the kinematics model.
This article is organized as follows. In the “Problem formulation” section, the five DOF underactuated AUV kinematics and dynamics equations in the presence of current disturbances are given. In the “Trajectory tracking strategy” section, we propose the control objective and then design the kinematics controllers and dynamics controllers. Besides, an ocean current observer for estimating unknown current disturbances is designed and the stability is analyzed. In the “Stability analysis” section, the system stability based on Lyapunov theorem is performed. Finally, an example with the WL-II is carried out in the “Simulation studies” section, and conclusions are stated in the final section.
Problem formulation
According to the literature, 30,31 the five DOF underactuated AUV kinematics and dynamics equations (neglecting motion in roll) can be represented by

and
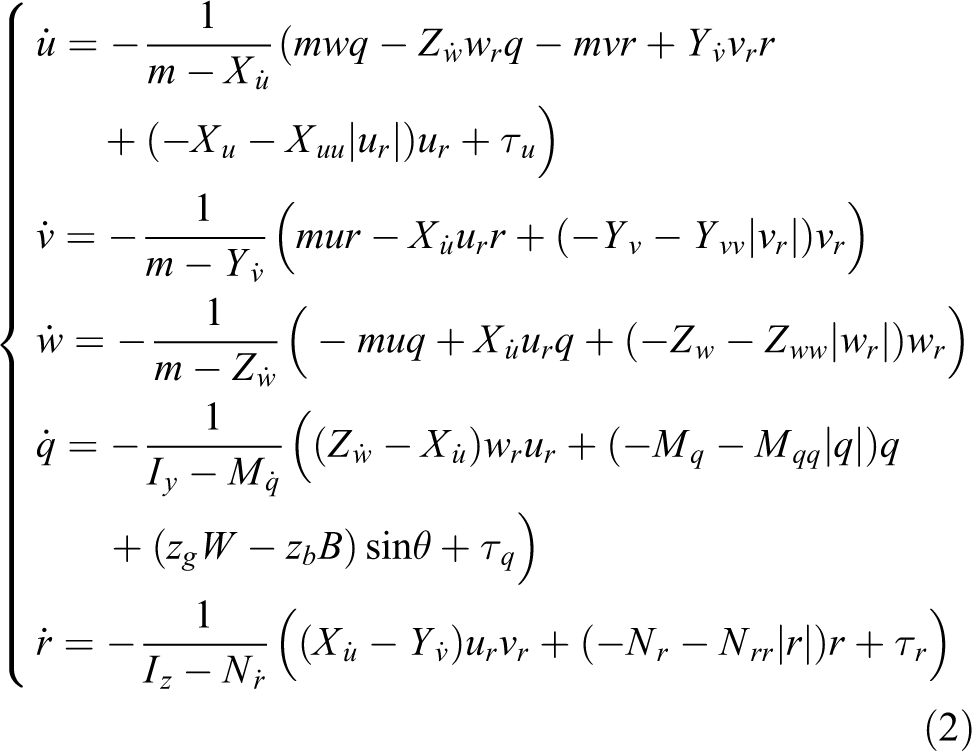
where m is the AUV weight; u, v, and w denote the surge velocity, sway velocity, and heave velocity, respectively; q and r represent pitch angular velocity and yaw angular velocity, respectively; θ and ψ are pitch angle and yaw angle, respectively;
The control objective is to force the AUV with equations (1) and (2) to track a continuous time-varying reference trajectory under unknown current disturbances.
Trajectory tracking strategy
Trajectory planning
To generate a reference trajectory with time-varying, the trajectory tracking controller using backstepping technique and ocean current observer are employed as follows.
Firstly, the reference trajectory signals must be determined before the trajectory tracking is carried out, that is, the position and velocities of the virtual AUV are available. Then, the controller is employed to follow the virtual AUV, and the tracking task is completed. In traditional research, the reference trajectory is directly used as the control objective, and a large amount of trajectory information is introduced, which increases the difficulty for the controller and simulation experiment. In this article, the error model between the reference trajectory and the AUV model is established by using virtual AUV, and then the reference trajectory information is converted into the velocities and position for the virtual AUV, which guarantees the tracking rationality.
Consider the time-varying reference positions defined as

Framework for trajectory tracking control.
For the underactuated AUV, the tracking errors are defined using

According to the actual AUV pose vectors and the reference vectors, we get the tracking errors as follows

Taking the time derivative for

where
Remark 1
The pitch angle is bounded such that
Remark 2
The actual pose vectors and reference vectors are related to time, namely,
Controller design
In this subsection, the trajectory tracking controller for an underactuated AUV based on the nonlinear backstepping technique is employed. 33,34
Kinematics controller
To eliminate the position errors, we consider the following Lyapunov function

The time derivative of V1 is given by

Then

The virtual speed variables are defined using α1 and α2, which can simplify the virtual control input and avoid the singular problem induced by initial state constraints.

To stabilize equation (8), we choose the virtual control variables

where
Returning to equations (2) and (10), we note that the virtual variables

Taking into account equation (10), its time derivative becomes

where

where k4 and k5 are positive constants.
Furthermore, equation (8) can be written as

Dynamics controller
Consider Lyapunov function

Differentiate V2 with respect to time yields

Combine equations (2) and (15), the longitudinal control input can be constructed as

where k6 is a positive constant.
Then

And equation (16) becomes

Define the pitch angular tracking error and yaw angular tracking error, respectively, as

To analyze the control error, we consider Lyapunov function
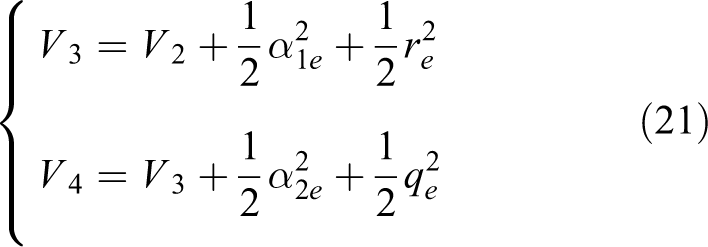
Whose time derivative satisfies

Consider the system dynamics in equation (2), the virtual inputs

where
Then

In the next section, we will discuss the stability of the proposed trajectory tracking strategy.
Ocean current observer
The current disturbances can be estimated by employing estimation for
We propose the following observer based on knowledge of the kinematics model for estimating the current velocities 37,38



To analyze the stability and convergence properties of the constructed observer (25)–(27), the system can then be written as follows

where
A visualization of the proposed trajectory tracking strategy can be shown in Figure 2, including the reference trajectory, the kinematics and dynamics equations, the ocean current observer, and controller. 39

Trajectory tracking strategy.
Stability analysis
Construct the closed-loop system of the underactuated AUV, the trajectory planning, the controller, together with the ocean current observer. There exist parameters that the tracking errors are globally uniformly eventually bounded.
Here, if we define

Then equation (24) can be written as

Taking

Using the Comparison Lemma, 40 it is observed that

Therefore

Equation (33) means that the tracking error signals converge to a compression bounded value near the zero, which can be reduced using the appropriate controller gains.
Consider the following Lyapunov function

where
Differentiate equation (34) with respect to time yields

Thus, it can be concluded that the errors converge to zero with global asymptotically stable. Furthermore, the ocean current velocity estimation converges asymptotically to the true and unknown ocean current velocity.
Simulation studies
In this subsection, an example on the underactuated AUV WL-II is given to illustrate the effectiveness of the proposed trajectory tracking strategy, together with the ocean current observer. The detailed model parameters
34,41
are employed as follows:

The reference yaw angle and pitch angle can be obtained from equation (3). Our objective is to track the reference trajectory
Simulation results using backstepping control and ocean current observer are plotted in Figures 3 to 8. As can be seen, the proposed trajectory tracking strategy is suitable for the 3-D trajectory tracking control, which shows its high performance and availability. In Figures 3 and 4, the reference and the actual trajectory of the underactuated AUV are displayed, including the varying time. Note that although there exist the current disturbances, AUV can set out from a large initial position and then track the virtual AUV accurately at 40 s. At the start of this example, the trajectory is not aligned with the reference radius (10 m) because of the virtual tracking objective and initial position, but the AUV converges onto the correct radius after a short period of time. Figure 5 illustrates surge velocity and virtual control variables. When the virtual AUV is tracking, the actual AUV surge velocity converges on the reference. Figure 6 shows the pitch angle and yaw angle when AUV tracks the time-varying helical trajectory. Besides, the AUV trajectory in the vertical plane is similar to the functions in whose pitch angle is kept at a certain value, and the trajectory in the horizontal plane is circle, whose yaw angle varies periodically, which both satisfy the actual diving. Furthermore, our proposed controller performs well with the AUV tracking all commands as required, which is illustrated in Figure 7. In addition to the observation for current disturbances shown in Figure 8, the errors of ocean current observer, namely, the comparison between estimation and reality, converge smoothly to a very small neighborhood of zero in a finite time, which shows that estimation for unknown current disturbances is employed by using ocean current observer. The results show that this trajectory tracking strategy is not sensitive to current disturbances and of good performance.

Reference and actual trajectories in three dimension.

Reference and actual trajectories in separate dimension.

Responses of velocity and virtual variables.

Responses of pitch angle and yaw angle.

Responses of force and moments.

Observation errors of unknown current disturbances.
Conclusions
This article considered the problems of 3-D trajectory tracking control for a single underactuated AUV under unknown current disturbances. A novel nonlinear backstepping technique was developed and an ocean current observer for estimation unknown current disturbances was designed, which avoided the singular problem by initial state constraints and simplified the virtual variable design of the controller. Furthermore, the system stability based on Lyapunov theorem was verified, and simulation results illustrated that AUV could set out from a large initial position and then track the virtual AUV accurately, which indicated high accurate tracking capacity.
Further research will address the cooperative trajectory tracking control of multi-AUVs based on the single trajectory tracking strategy and robust control algorithms, such as collision avoidance and intelligent navigation control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant nos. 51579022, 51879023, and 51609030), Fundamental Research Funds for the Central Universities of China (grant nos. 3132018306 and 3132018025), and Project of Shandong Province Higher Educational Science and Technology Program (grant no. J18KA043).