
Abstract
This paper presents a state-feedback-based backstepping control algorithm to address the point stabilization (or set-point regulation) control problem for an underactuated autonomous underwater vehicle (AUV) in the presence of constant and irrotational ocean current disturbance. A nonlinear three degree of freedom dynamic model in the horizontal plane for an AUV without symmetry fore/aft is considered. The expression of the relationship between the desired heading angle of the AUV and direction angle of the ocean current, which is a necessary condition for precise point stabilization control of an underactuated AUV in the presence of ocean current disturbance is firstly discussed in this paper. The proposed backstepping control law for point stabilization has further been enriched by incorporating an additional integral action for enhancing the steady state performance of the AUV control system, while practical asymptotic stability analysis of the system is carried out using Lyapunov theory and Barbalat's Lemma. Simulation experiments of an underactuated AUV verify the theorem proposed and demonstrate the effectiveness of the controller.
Keywords
Introduction
Autonomous underwater vehicles (AUVs) are attracting growing attention from researchers all over the world because of their promising applications in military reconnaissance, homeland security, hydrographie surveys, mineral resources sampling, environmental monitoring, ocean engineering maintenance and marine scientific exploration [1–4]. Guidance, navigation and control of the AUV has been one of the most important and meaningful areas in AUV research over the last few years; at the same time, many navigation and control algorithms have been proposed to improve the safety, reliability and effectiveness of AUV systems.
Point stabilization or set-point regulation, in some ways similar to dynamic positioning, refers to the problem of steering a vehicle to a final target position with a constant desired orientation [5]. Point stabilization is the most basic and critical motion control for the AUV, as an AUV generally needs to be stabilized at a waypoint because of environment conditions and missions, e.g., obstacle detection, target reconnaissance and location marking [see 6–10]. However, precise point stabilization control of the AUV is not easy, due to its coupled nonlinearities, nonholonomic qualities, generally underactuated nature and it being accompanied by disturbances arising from the external environment, e.g., ocean currents [11–16].
An AUV is usually underactuated as the number of control inputs is less than degrees of freedom to be controlled; thus, classic control technique designs for fully actuated systems are not reliable for use in these systems [16–18]. It has been proven that the underactuated AUV system does not satisfy the necessary conditions of Brockett and therefore cannot be stabilized by any time-invariant continuous state feedback controller [19]. Therefore, significant attention on behalf of researchers all over the world has promoted the development of advanced control technologies for point stabilization and the dynamic positioning control of the AUV in recent decades, and various control approaches have been proposed in the literature [16, 20–25].
In [16], a Lyapunov-based adaptive point stabilization and waypoint tracking control law is presented in the non-smooth transformed coordinates for an underactuated AUV, and an exponential observer for ocean current disturbance is designed, where the surge velocity is designed to force the position of the vehicle to the desired point, while angular velocity is designed to regulate the line-of-sight (LOS) angle to zero. A dynamic model-based control scheme is proposed for the point stabilization control of an underactuated AUV in [20], where an unscented Kalman filter (UKF) is applied for sensor fusion processing to provide an estimation of the full state vector of the system. Then, estimation of the state vector is used as feedback for the proposed control scheme in order to stabilize the AUV to the desired position and orientation.
Moreover, a robust adaptive neural network controller, combined with the vectorial backstepping technique, is proposed for dynamically positioning marine vehicles in [21]. Several types of hybrid controllers for the high level control of point stabilization systems are developed in [22], which includes multi-output PID controllers with position measurements and multi-output PID combining acceleration feedback controllers with position and acceleration measurements. In addition, a new modified linear quadratic Guass (LQG) feedback controller and a model reference feedforward controller are applied to the model-based point stabilization system in [23]; a port-Hamiltonian framework is used to design a nonlinear point stabilization controller with integral action in [24] and a passivity-based controller for the point stabilization of marine vehicles is presented in [25].
According to the theory of submarines, the six degrees of freedom kinematic and dynamic model of an AUV is often decomposed into two mutually, non-coupled vertical and horizontal plane subsystems [26–28]. Furthermore, due to the similar properties between them, many studies on AUV motion control are carried out in a horizontal plane [3, 10–14, 21, 23–24, 29–33].
However, most of the studies noted above have only focused on developing results that are valid for AUV models by using the simplifying assumption of having diagonal damping and inertia matrices [11, 14, 20]. For these matrices to be diagonal, an AUV should be both port/starboard and fore/aft symmetrical. Most AUVs have port/starboard symmetry, but they do not have symmetry fore/aft and their models will hence include off-diagonal matrix elements. Control design in the general case where non-diagonal matrix elements are also taken into account is not as difficult in a fully actuated case, but is nonetheless an active and difficult topic of research in the underactuated case [19, 34]. Though many motion control algorithms have been developed for dealing with underactuated systems of the AUV and other marine vehicles in [13,14,16–20,29,30,34–36], little research has considered fore/aft asymmetry of the AUV model, the exceptions being [17–19,34–36]. In [17–19,34–36], details concerning the control performance differences of AUVs when comparing the nonlinear control method based on the symmetric model and that based on the non-symmetric model are not presented.
Ocean current disturbance is one of the most important environmental disturbances when an AUV is working in the deep sea. Precise motion control of the AUV cannot ignore the influence of ocean currents. In this paper, a frequently used simplification that assumes the ocean current is irrotational and constant in an inertial reference coordinate system is adopted, as in, for example, [16,34]. Though many research results focused on the motion control of the AUV and other marine vehicles are obtained in the presence of ocean currents [13,16,30,34–36], a detailed description of the relationship between the direction of the ocean current and the desired yaw angle for point stabilization has to date not been clearly proposed.
Motivated by the above considerations, this paper addresses the problem of point stabilization for an underactuated AUV without fore/aft symmetry in the horizontal plane and in the presence of constant and irrotational ocean currents. The AUV's mathematical model of kinematics and dynamics in the horizontal plane is established by considering fore/aft non-symmetry and ocean current disturbance, and uses as a primary reference [5]. The relationship between the desired heading angle of the AUV and the direction angle of the ocean current for point stabilization is discussed in detail in this paper. In order to enhance the steady state performance of the underactuated AUV system, an integral action is added to the backstepping control law for position stabilization; in this way, a time-varying control law is derived. Practical asymptotic stability of a point stabilization system for the underactuated AUV is proven by Lyapunov theory and Barbalat's Lemma, and simulation results are presented to demonstrate the effectiveness of the proposed control schemes.
The paper is organized as follows. In section 2, an AUV model without fore/aft symmetry is presented and the problem of point stabilization in the presence of ocean currents in the horizontal plane is formulated. In section 3, a novel nonlinear backstepping control law containing an integral action for point stabilization is derived, and the closed-loop system is proved to be stable by Lyapunov theory and Barbalat's Lemma. Simulation results and discussions are presented in section 4 and conclusions are given in section 5.
Problem Formulation
In this section, the problem of point stabilization in the horizontal plane is formulated. The kinematic and dynamic equations of the AUV without fore/aft symmetry are presented in section 2.1, while a point stabilization control problem statement for the underactuated AUV is provided in section 2.2.
AUV Modelling
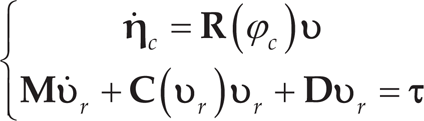
In this paper, a three degree of freedom underactuated AUV without fore/aft symmetry in the horizontal plane in the presence of an ocean current is considered, assuming that the ocean current is irrotational and constant. An inertial reference coordinate system {n} = (xn, yn) as shown in (a) of Figure 1, whose origin on is an arbitrarily selected point on earth is established. The velocity of the ocean current is Vc in {n} and βc denotes the direction of the current. Then, the AUV's kinematic and dynamic can be described as follows in (1), according to Thor I. Fossen's model in [5]:
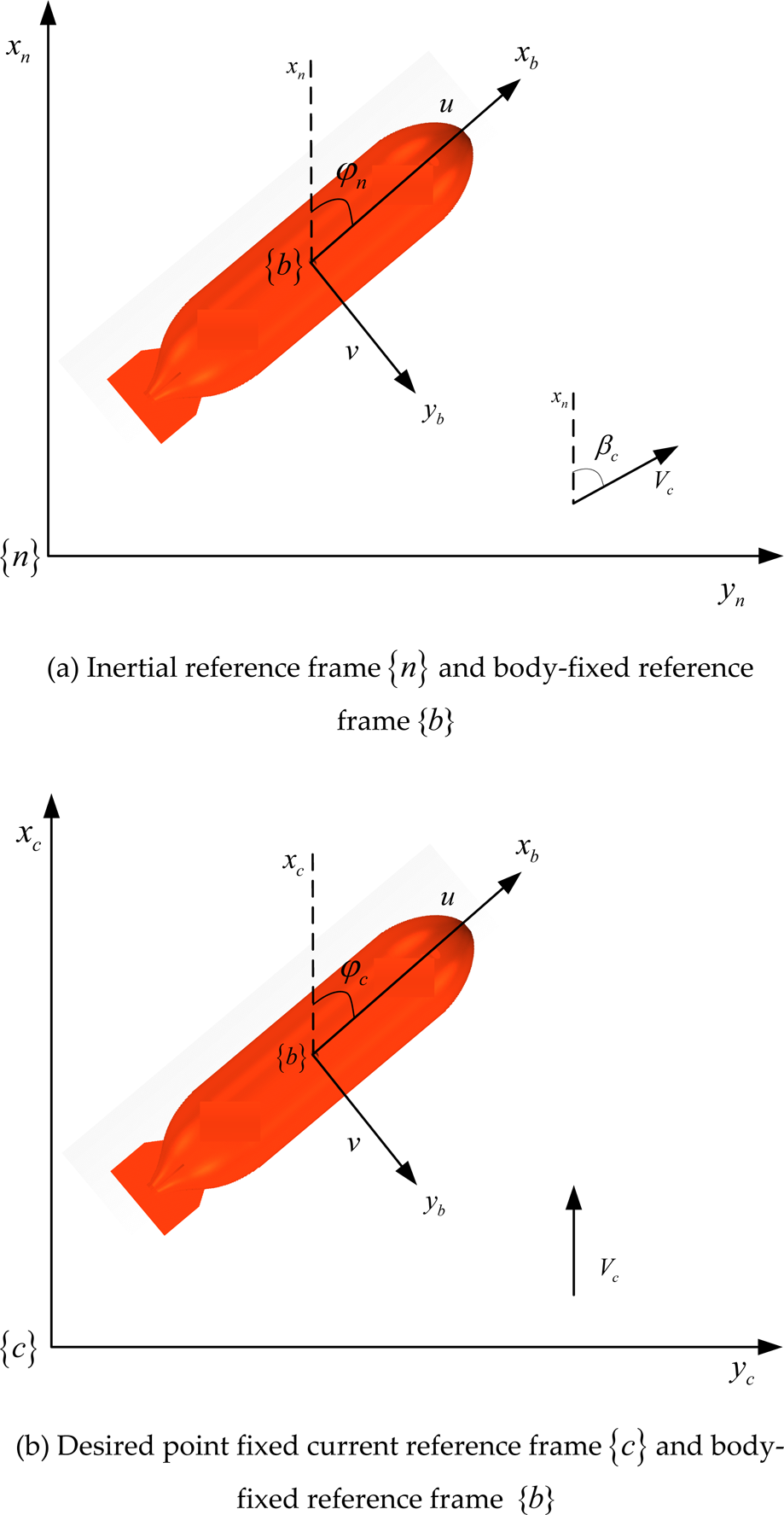
Reference frames for an AUV in the horizontal plane

where

where uc, vc denotes the surge and sway velocities of the ocean current expressed in {b}, respectively.
The system matrices are given as:
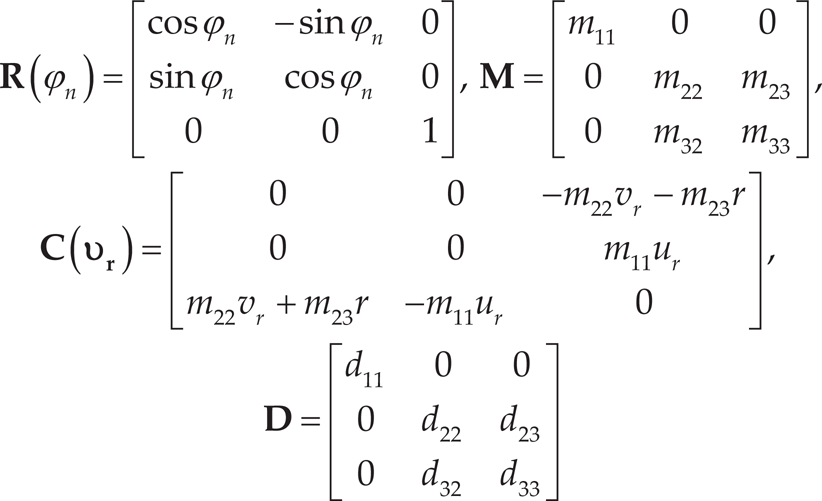
where matrix
In order to simplify the description of the point stabilization control problem, a desired point fixed current reference frame {c} = (xc, yc) is established as shown in (b) of Figure 1, whose origin oc is chosen to coincide with the desired waypoint and the xc-axis is parallel to the ocean current with the same direction. A new description of the AUV in the desired point fixed current reference frame {c} can be shown as follows in (4):
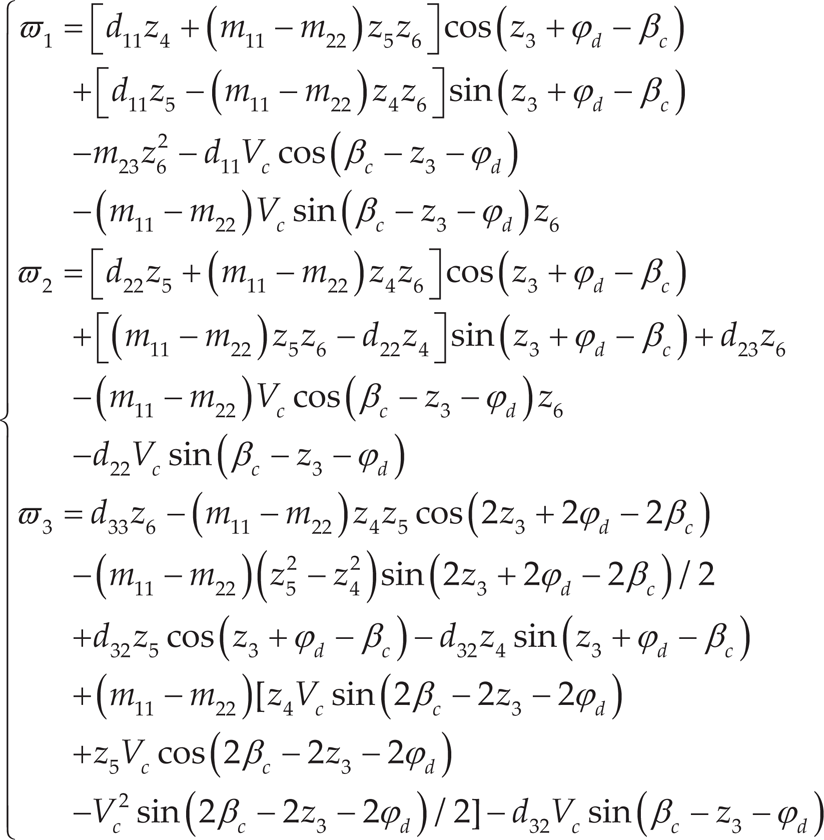
where

where
The general control problem of point stabilization for an AUV that we consider in this paper can be formulated as follows.
Consider the model of an AUV given by (1). Let pd = [xd, yd) be a desired position and ϕd be a desired heading angle in {n}. The control objective is to derive a control law for τu and τr so that pe = (xe, ye) = (xn – xd, yn – yd) and
Controller Design for Position Stabilization
This section presents a nonlinear control law using a backstepping technique for point stabilization of an underactuated AUV in the presence of ocean current disturbance. Assuming that the ocean current is irrotational and constant in {n}, and the constant speed is denoted by Vc, while its fixed direction is expressed by βc, as shown in (a) of Figure 1. The main process of the controller design and its implementation can be shown as in Figure 2.

Flow diagrams and control block diagrams for the controller design and its implementation
Coordinate transformation is commonly used in controller design for marine vehicles [5,16–18,34–36]. In this paper, the coordinate transformation that need to be carried out in order to facilitate the controller design consists of two steps; the first step is derived from [16–18,34–36], while the second step is different, as is shown below:
Step 1:
The first equation of (4) can be rewritten as:

Differentiating both sides of (6) results in:

Note that:

The second equation of (4) can be rewritten as:

Substituting (9) into (7) yields:

and (10) can be rewritten as:

Expanding (11) leads to:

and

Step 2:
Let pd be coincide with the origin oc of the frame {c} as shown in (b) of Figure 1. Define the following new variables

Designing the control input transformation as follows:

and
Equation (4) can be transformed into (17) as follows:

One primary result of this paper is presented in this section in

Proof: assuming that the stabilization for point pd was achieved in {n}, then the state variables of the AUV such as velocities and accelerations converge to zero, and position converge to point pd, while ϕn converge to ϕd. Thus, it is easy to prove that

As

Therefore,
According to the initial state and desired position of the AUV, let βc = ϕd or βc − ϕd = π that satisfies

and expressions (14–16) become:


Define the following error:

where k1 is a positive constant. Differentiating both sides of (24) leads to:

and
Define the following new variable:


where δ1, λ1 are positive constants. Substituting (28) and (29) into (25) gives:

Differentiating both sides of (29) leads to:
and
and

Define the following error:

where k2 is a positive constant. Differentiating both sides of (34) leads to:


Define:



where δ2, λ2 are positive constants. Substituting (37) and (38) into (35) gives:

Differentiating both sides of (38) leads to:


and

From (31) and (40), we choose the controls u1 and u2 as:

where δ3, δ4 are positive constants. In conjunction with expression (22), the control inputs τu and τr for the underactuated AUV are designed as follows:

Proof:
Step 1
Substituting (41) into (31) and (40), combining (27), (30), (36) and (39) gives:

The following Lyapunov function candidate is considered:

Differentiating both sides of (45) along the solutions of system (44) results in:

The expression of (46) implies that V (t) < V (0), therefore, ∊1, ∊2, θ1, θ2, θ3 and θ4 are bounded and then θ1, θ2, θ3 and θ4 are bounded, as they satisfy the final four equations of (44). The derivative of

Since θ1, θ2, θ3 and θ4 and θ4 are all bounded, Equation (47) implies the fact that
Step 2
This step aims to prove that the variables

Similarly, equation (34) implies that:

Equations (28), (29), (37) and (38) imply that:

Equations (26), (48), (49) and (50) imply that:

Thus, the variables
Step 3
The aim of this step is to prove that the control law for surge force τu and torque τr expressed in (43) have pe = (xe, ye) and
As

and then,

Therefore,
The proof for
In order to verify and illustrate the performance of the control schemes proposed for dynamic positioning and the position stabilization control of the AUV in the presence of constant ocean current disturbance, computer simulations are carried out on a model. An AUV with hydro dynamic parameters is shown in Table 1, which is a 1:6 scale model of XX AUV, developed by the National Key Laboratory of Science and Technology on Autonomous Underwater Vehicle, which is affiliated with Harbin Engineering University, China (see Figure 3).
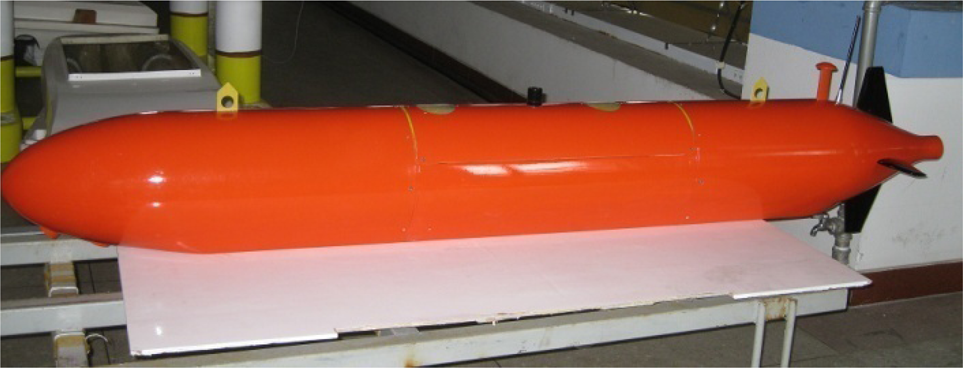
A 1:6 scale model of XX AUV
Parameters of the AUV model

Several experiments are carried, as shown below, ranging from case 1 to case 5. The initial position and heading angle of the AUV is xM = 10m, yn = 5m, and ϕn = 0, with the initial velocities u(0) = v(0) = r(0) = 0, and the desired position is set as xn = 20m, yn = 10m. The constant and irrotational ocean current is chosen as Vc = 1m/s with the direction angle βc = 45° in {n} for case 1 to case 3. The parameters of the controller designed above are chosen as k1 = 12.2, k2 = 0.5, λ1 = 0.01, λ2 = 0.05, δ1 = 0.5, δ2 = 3.2, δ3 = 2 and δ4 = 1, and the criteria used to select them are based on the following procedure: (1) parameters δ1, δ2, δ3, δ4 are selected to tune the convergence behaviour of θ1, θ2, θ3, θ4 to zero, respectively; (2) parameters λ1, λ2 are chosen to adjust the performance of the integral action of θ1, θ3 in order to enhance the convergence rate of θ1, θ3, as too strong integral action will lead to saturation of the control action; parameters λ1, λ2 are usually chosen as small values. (3) parameters k1, k2 are used to regulate the convergence of variables
Case 1. In this case, the AUV model without fore/aft symmetry is considered and the desired heading angle is chosen to be the same as the direction angle of the ocean current. Simulation results are shown below in Figure 4 and Figure 5.

Position stabilization results of the AUV

Stabilization results of some important variables
Case 2. In this case, the AUV model without fore/aft symmetry is not considered; thus, the inertia and damping matrices are symmetric matrices without non-zero off-diagonal elements, while the desired heading angle is still chosen to be the same as the direction angle of the ocean current. Simulation results are shown below in Figure 6.

Position stabilization results of the AUV without consideration of fore/aft non-symmetry
Case 3. In this case, the AUV model without fore/aft symmetry is considered, while the desired heading angle is chosen as ϕd = 30°, which is not parallel to the direction of the ocean current and does not satisfy the expression (18). Simulation results are shown below in Figure 7.
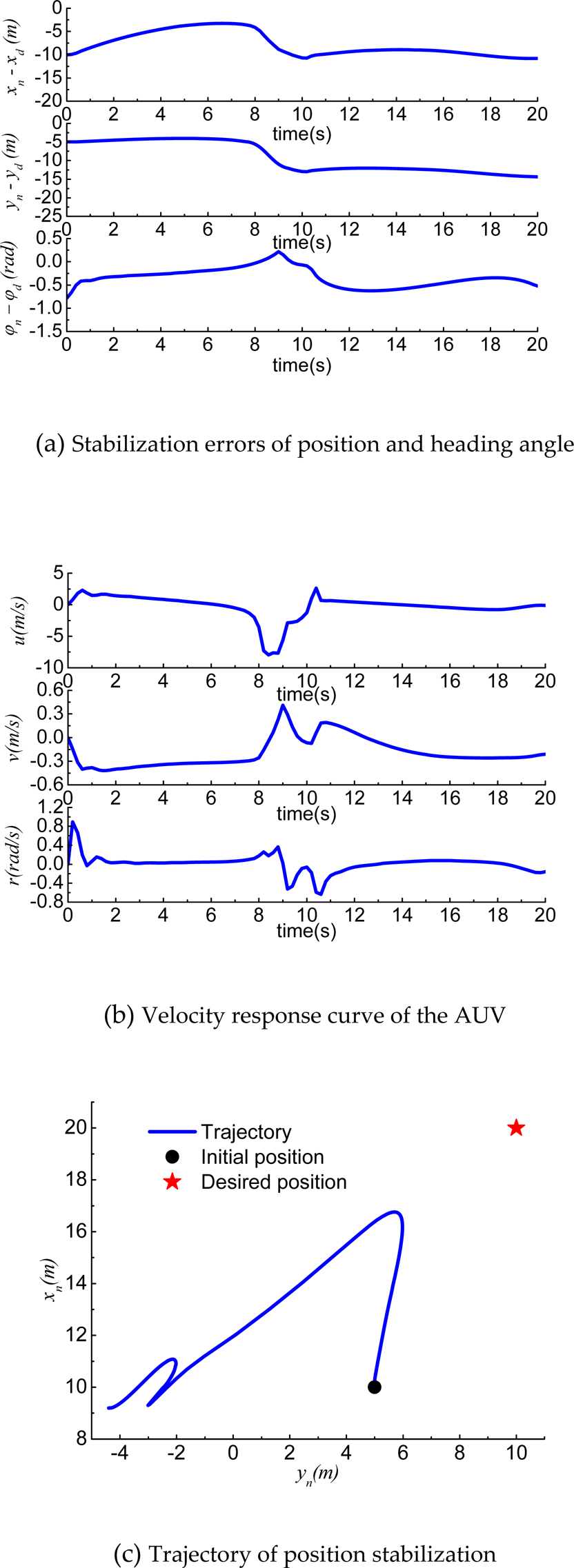
Position stabilization results of the AUV with the desired heading angle not satisfying
Case 4. In this case, several ocean current speeds are chosen for studying the robustness of the point stabilization controller designed for the AUV. The initial state of AUV and the desired position chosen here are the same as in case 1 to case 3. The speeds of the ocean current are chosen as Vc = 0.5m/s, Vc = 1m/s, Vc = 1.5m/s, Vc = 2m/s and Vc = 2.5m/s, separately and with the same direction angle βc= 45° in {n}. Simulation results are shown below in Figure 8.

Position stabilization results of the AUV in different ocean current speeds
Case 5. In this case, several ocean current angles are chosen for studying the robustness of the point stabilization controller designed for the AUV. The initial state of the AUV and the desired position chosen here are the same as in case 1 to case 3, and the direction angles of the ocean current are chosen as βc = 60°, βc = 45°, βc = 30°, βc = −30°, βc = −45° and βc = – 60°, separately and with the same speed, Vc = 1m/s in {n}. Simulation results are shown below in Figure 9.

Position stabilization results of the AUV with different ocean current angles
Five cases of experiments are carried out to verify the theorems proposed and to demonstrate the effectiveness of the control algorithm designed in this paper. Simulation results, shown in Figure 4 and Figure 5, indicate that the controller designed for position stabilization can steer the AUV to the target position with the desired heading angle and that all state variables, including intermediate variables, converge to zero. Furthermore, it is obvious that in the case of (c) of Figure 4, external torque τr converges to zero while external force τu converges to a non-zero value in order to compensate for the effects of ocean currents' disturbance on the AUV.
Simulation results in Figure 6 show that no consideration of fore/aft non-symmetry of the AUV will lead to steady state errors in position stabilization, thus demonstrating that fore/aft non-symmetry of the AUV needs to be taken into account for precise motion control.
A nonlinear model-based backstepping controller is designed in this paper for the position stabilization of an AUV in the presence of ocean currents. In order to simplify the controller design, a desired point fixed current reference frame is established; following on, point a stabilization control problem is formulated. A theorem is proposed in this paper, firstly indicating that the direction of the ocean current needs to be parallel to the heading of the AUV for point stabilization; this is proven through both theory and simulation experiments. An integral term is added into the controller in order to improve the practical asymptotic stability of the AUV system; then, a time-varying controller is obtained. With the aid of Lyapunov theory and Barbalat's Lemma, the practical asymptotic stability of the overall system is proven in theory and verified through simulation experiments with an AUV model. Meanwhile, simulation results show excellent robustness in terms of ocean current disturbances on the designed controller.
Footnotes
6.
The authors would like to acknowledge the support of the National High Technology Research and Development Program 863 of PR China (Nos. 2012AA09A304 and 2014AA09A509) and National Natural Science Foundation of China (Nos. 51209025, 51409054, 51409059, 51409061).