
Abstract
In this article, the three-dimensional trajectory tracking control of an autonomous underwater vehicle is addressed. The vehicle is assumed to be underactuated and the system parameters and the external disturbances are unknown. First, the five degrees of freedom kinematics and dynamics model of underactuated autonomous underwater vehicle are acquired. Following this, reduced-order linear extended state observers are designed to estimate and compensate for the uncertainties that exist in the model and the external disturbances. A backstepping active disturbance rejection control method is designed with the help of a time-varying barrier Lyapunov function to constrain the position tracking error. Furthermore, the controller system can be proved to be stable by employing the Lyapunov stability theory. Finally, the simulation and comparative analyses demonstrate the usefulness and robustness of the proposed controller in the presence of internal parameter uncertainties and external time-varying disturbances.
Keywords
Introduction
Autonomous underwater vehicles (AUVs) are widely used in marine scientific investigation, marine mineral exploration, and oceanographic mapping. 1 So the need for AUVs has become increasingly apparent and the research on the trajectory tracking control of AUVs becomes more important. Considering reducing the actuator cost and weight or increasing the reliability of the system in case of actuator failure, most of AUVs have fewer actuators than the number of degrees of freedom. 2,3 Nowadays, motion control of underactuated AUVs has been absorbing significant attention of researchers mainly in nonlinear control.
In past decades, lots of methods have been proposed to track AUVs, such as sliding mode control, 4,5 robust control, 6 neural network control, 7 and so on. There are also several methods combining the backstepping technique and other methods that are proposed to solve trajectory tracking problem of underactuated AUVs in a variety of complex environments. A current observer-based backstepping controller is developed to achieve trajectory tracking control of underactuated AUVs in the presence of unknown current disturbances. 8 The combination of backstepping technique and adaptive sliding mode control enhances the robustness of an AUV in the presence of model parameter uncertainties and external environmental disturbances. 9 Backstepping technique and bio-inspired models are used to increase system robustness and avoid the singularity problem in backstepping control of virtual velocity error. 10
Active disturbance rejection control (ADRC) was originally proposed by Han. 11 It’s worth noting that nonlinear tracking differentiator (TD) and extended state observer (ESO) are important parts of ADRC. The uniqueness of ADRC is that it treats all factors affecting the plant, such as system nonlinearities, uncertainties, and external disturbances as total disturbances to be observed and compensated by ESO and it has been applied in almost all domains of control engineering. 12 ADRC has been adopted to solve the path following control problem of underactuated AUVs, 13 but it has rarely been used in underactuated AUVs’ trajectory tracking control.
On the other hand, in some cases, it is necessary to constrain the position tracking error of an underactuated AUV within certain given boundary function all the time for safety reasons. It has been proved that the barrier Lyapunov function method 14 –17 and prescribed performance control method 18,19 are effective solutions to prevent constraint violation. A barrier Lyapunov function is incorporated with the backstepping control scheme to handle the position tracking error constraint. 20 Prescribed performance functions have been adopted to constrain the position and orientation errors of an underactuated AUV which can ensure both the prescribed transient and steady-state performance constraints. 21,22 But in these studies, point-to-point navigation is used and it is worth noting that the desired yaw angle is not continuously differentiable when the position error equals zero. To avoid this problem, the position tracking error converges to a constant instead of zero.
Underactuated AUVs lack sway and heave propellers, so the transverse and vertical position errors of trajectory tracking are usually eliminated by controlling the yaw and pitch angles, that is also why the backstepping technique is often employed in the trajectory tracking control of underactuated AUVs. However, backstepping controller has two obvious disadvantages. The first one is that the unknown transverse and vertical disturbances are usually omitted when deducing the virtual control variables of yaw angular and pitch angular velocities. As a result, the unknown transverse and vertical disturbances cannot be compensated in time, which always affects the result of trajectory tracking. The other one is that the problem of “explosion of terms” caused by the operation of differentiation always exists. Based on the above analysis, that reduced-order linear extended state observers (RLESOs) are used to estimate and compensate for the total disturbances which can improve the performance of backstepping controller and enhance the robustness of underactuated AUVs. Besides, TD can be used to provide the filtered version of the input signal and its differentiation. So TDs are employed to solve the problem of “explosion of terms.” What’s more, by barrier Lyapunov function, the controller can prevent the violation of the time-varying position error constraint and render the position tracking error converges to zero. In this work, the proposed controller can solve the three-dimensional trajectory tracking control problem of underactuated AUVs in the presence of internal parameter uncertainties and external unknown disturbances.
The rest of this article is organized as follows. The mathematical model of an underactuated AUV system is presented in the second section. In the third section, RLESOs are designed to estimate the total disturbances. The backstepping ADRC controller design procedure for the three-dimensional trajectory tracking of an underactuated AUV is illustrated in the fourth section. The simulation and comparative analyses are provided in the fifth section and some conclusions of this article are brought forward in the sixth section.
Problem formulation
This section presents the five degrees of freedom kinematics and dynamics model of an underactuated AUV and then formulates the problem of trajectory tracking.
AUV modeling
We define the earth-fixed coordinate system {E} and the body-fixed coordinate system {B} of the AUV as shown in Figure 1, where

AUV coordinate system. AUV: autonomous underwater vehicle.
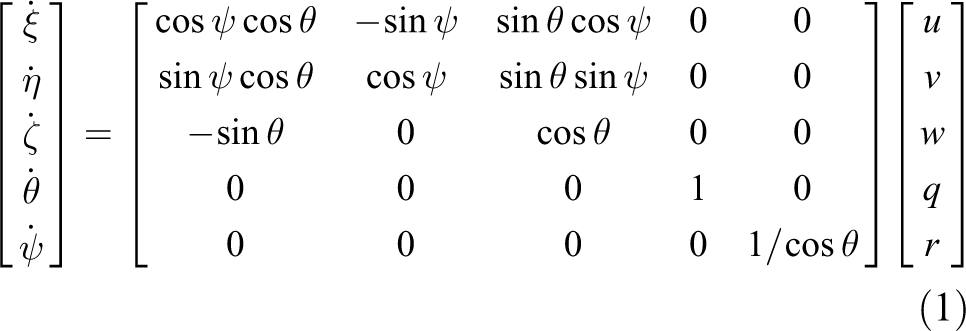
The underactuated AUV is assumed to satisfy the following assumptions 23,24 : (1) the center of gravity coincides with the center of buoyancy, (2) the mass distribution is homogeneous, and (3) the hydrodynamic drag terms of order higher than two and roll motion are neglected. Then the five degrees of freedom (DOF) AUV kinematics equations can be written as
The five DOF underactuated AUV dynamics equations, considering the internal parameter uncertainties and external environmental disturbances, can be expressed by the following differential equations






where
Assumption 1
The underactuated AUV’s velocities and control inputs are bounded, that is,
Assumption 2
For equation (2), the total disturbances and their derivatives are all bounded. There exists:

where
Control objectives
In order to facilitate the formulation,
Considering the kinematics and dynamics equations, design a controller to render the tracking error
RLESOs design
According to the design principle of RLESO which is firstly proposed by Huang and Xue, 12 RLESOs for the estimations of the total disturbances are designed as follows





where
If Assumption 2 is satisfied, we can obtain 25 :

where
Backstepping ADRC controller design
Coordinate transformation
The desired yaw angle and pitch angle are obtained only based on the reference trajectory


where
Then the position and attitude error variables xe
, ye
, ze
,
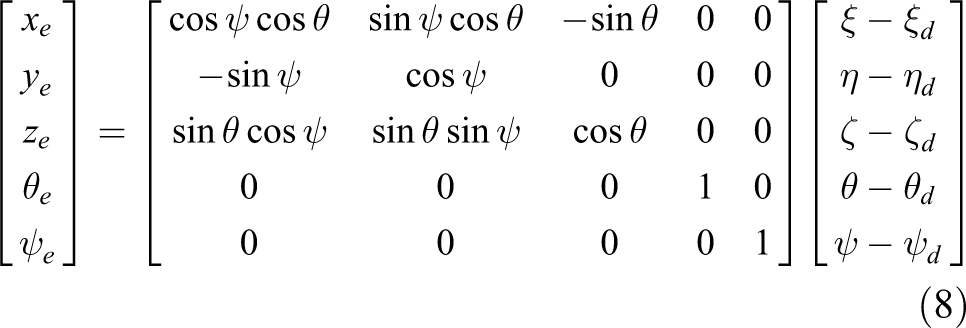
which express the errors in the body-fixed frame.
The derivatives of the position and attitude error variables are described as

Backstepping controller with RLESOs
This section designs a trajectory tracking controller by combining the backstepping technique and RLESOs and analyzes the stability based on the Lyapunov stability theory. Step 1: A time-varying barrier Lyapunov function is defined as

where

Choose virtual velocity error variables 26


In order to make



where k 1, k 2, and k 3 are positive constants.
Since the virtual variables ud
,



Substituting equations (14) to (19) into equation (11) yields

Step 2: To stabilize the error variable ue , define

Its derivative along with equation (17) and equation (2a) becomes

If we choose control input

where k 4 is a positive constant. Then equation (22) can be rewritten as

Step 3: To stabilize the error variable

Then the time derivative of V 3 becomes

Define

It can be known


The time derivative of equation (18) along with equation (12) and equation (29) becomes

In order to make

where
Considering that rd is not a true control input, we define error variables


We can obtain

where
Substituting equations (30) to (34) into equation (26) yields

Step 4: To stabilize the error variable re
, define

Its derivative along with equation (32), equation (35) and equation (2e) becomes

In order to make

where k 6 is a positive constant. Then equation (37) becomes

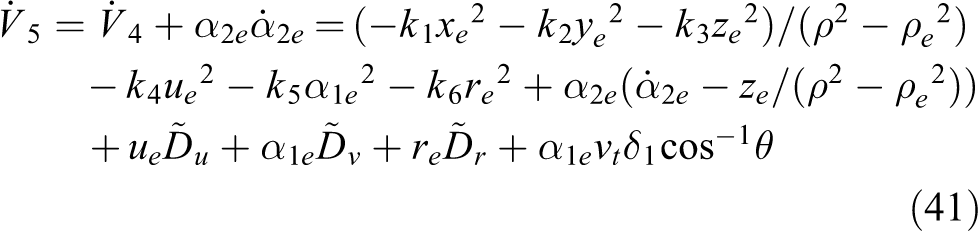
Step 5: To stabilize the error variable

Then the time derivative of V 5 becomes
Define

It can be known


The time derivative of equation (19) along with equations (16) and (44) becomes

In order to make

where
Considering that qd is not a true control input, we define error variables


We can get

where
Substituting equations (45) to (49) into equation (41) yields

Step 6: To stabilize the error variable qe , define

Differentiating V 6 with respect to time along with equation (47), equation (50), and equation (2d) yields

In order to make

where k 8 is a positive constant. Then equation (52) becomes

The complete Lyapunov function is as follows

Here, if we define

Then with the help of the inequality

where
We know from the section “RLESOs design” that

Therefore

Equation (59) means that the tracking error signals converge to a compression bounded value near the zero by increasing control gains appropriately and the system is stable.
Backstepping controller with TDs and RLESOs
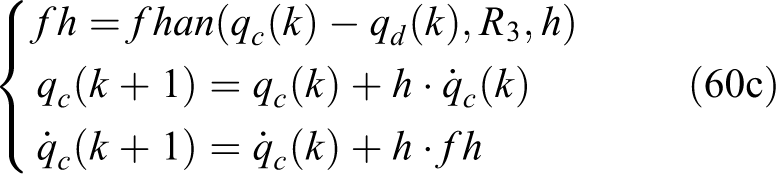
TD can be used to provide the filtered version of the input signal and its differentiation as fast as possible. And it is well known that the operation of differentiation always causes the problem of “explosion of terms” when the traditional backstepping technique is employed. In order to solve this problem, we add TDs to the above-mentioned controller and the TDs are as follows


where R
1, R
2, and R
3 are the acceleration factors to be adjusted and h is the sampling period. The function
Corollary: Considering the TDs described by equation (60), if the input signals ud
, qd
, and rd
are differentiable and bounded, and if there exist arbitrarily small values a, b, c,



Using uc
, qc
, rc
and

Redefine equation (56) as

where
Simulation and discussion
In this section, the simulation and comparative analyses demonstrate the usefulness and robustness of the proposed controller. The simulation is performed in MATLABR2014a/Simulink and the following two controllers are compared. Backstepping sliding mode controller.

where

The control gains are chosen as
(2) Backstepping ADRC controller combining the backstepping technique, TDs, and RLESOs (equation (62)), is marked as backstepping ADRC in the simulation figures. The time-varying error constraint is chosen as
We conduct simulation on the underactuated AUV WeiLong-II (Figure 2) developed by Harbin Engineering University in China. The nominal values of model parameters are

WL-II underactuated AUV. AUV: autonomous underwater vehicle.
The reference trajectory is given as follows
The AUV initial conditions are set as follows:
The simulation results are shown in Figures 3 to 8. As can be seen in Figure 3, the vehicle actual trajectory fluctuates around the desired trajectory under the backstepping sliding mode controller which is induced by the model uncertainties and disturbances, but the backstepping ADRC controller shows perfect performance. Clearly, the performance of the backstepping ADRC control laws is better than that of the backstepping sliding mode control laws in the presence of both internal parameter uncertainties and external time-varying disturbances.

(a to c) Desired trajectory and vehicle actual trajectory.

(a to d) Position tracking errors.

(a to e) Velocity errors and virtual variable errors.

(a to c) Responses of actual control inputs.

(a to e) Estimates and actual of the total disturbances.

(a to f) ud
,rd
,qd
and uc
,
The position error
The responses of velocity errors and virtual variable errors are shown in Figure 5. The velocity errors and virtual variable errors converge to zero rapidly and smoothly under the proposed controller, but the velocities and virtual variables fluctuate around desired values with the disturbances under the backstepping sliding mode controller. The results clearly demonstrate the effectiveness of the designed RLESOs.
The responses of actual control inputs are displayed in Figure 6.
The actual values of the total disturbances and the estimation values of the RLESOs are shown in Figure 7 which demonstrates that the designed RLESOs can quickly and accurately estimate the total disturbances Du , Dv , Dw , Dq , and Dr .
In addition, Figure 8 shows
Conclusion
In this work, a backstepping ADRC controller based on the time-varying barrier Lyapunov function is developed to achieve three-dimensional trajectory tracking control of underactuated AUVs in the presence of internal parameter uncertainties and external time-varying disturbances and guarantee the satisfaction of predefined performance requirements. RLESOs are used to estimate and compensate for the total disturbances and TDs are employed to calculate the derivative of virtual control commands. From the simulation results, the proposed controller can remain satisfactory performance of an underactuated AUV in a complex environment and the simulation shows high accurate tracking capacity which demonstrates that using RLESOs can improve the performance of backstepping controller and using TDs can make the calculation of backstepping control laws simplified. Conclusions can be drawn that the backstepping ADRC controller has the ability to reject both internal parameter uncertainties and external time-varying disturbances. Experiments will be conducted to demonstrate the effectiveness of the proposed control laws and the effect of actuator saturation and faults will be studied in the near future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Key Research and Development Plan of China (No. 2017YFC0305700), National Natural Science Foundation of China (No. 51879057, No. U1806228, and No. 51809064), Qingdao National Laboratory for Marine Science and Technology (No. QNLM2016ORP0406), and Fundamental Research Funds for the Central Universities (No. HEUCFG201810 and No. 3072019CFJ0103).