
Abstract
When two manipulators cooperate to clamp a rigid object, a closed chain with both ends fixed is formed. The singularity of a single manipulator causes the closed chain to be at a singularity, which results in uncertainty in the velocity mapping between the terminal and joint space. This study proposes a closed-chain singularity processing method for dual-arm collaboration, adopting the Jacobian pseudoinverse method based on damped least squares to obtain an approximate solution. During the solution process, the adaptive damping factor is improved by cubic polynomials, and the optimal damping factor is determined by quadratic sequence programming. Furthermore, this study analyzes the kinematic constraints of the closed-chain system and constructs a closed-chain Jacobian to judge whether the system is in a singular region. Finally, the effectiveness of the proposed method is verified through simulations.
Introduction
A dual-arm system outperforms a traditional tandem robotic manipulator system in terms of target object operations. For example, grasping of large or irregularly shaped objects can be completed through the cooperation of dual arms, whereas a single arm may not be able to perform a similar job. When the dual arms cooperate to carry a rigid object, the object and the two manipulators form a chain structure with both ends fixed, which is called a closed-chain system.
However, both a single-arm robot and a closed-chain system have a singularity, which manifests as uncertainty in the expected terminal velocity at the singularity when it is mapped to the joint space. 1 This uncertainty is due to the non-full rank of the Jacobian of the manipulator under the above joint configuration, resulting in the inability to solve the Jacobian inverse matrix. Redundant manipulators can rely on redundancy features to directly avoid singularities. 2 Conversely, nonredundant manipulators primarily deal with singularities by obtaining an approximate solution, and the damped least squares (DLS) method is the most typical approximation method applied to this problem. 3,4 In such methods, DLS is used to construct the pseudoinverse of the Jacobian, and then, a special velocity inverse mapping formula is used to solve the problem that the dimension of the driving joint is greater than the degree of freedom (DOF). 5
The selection of the adaptive damping factor in the constructed pseudoinverse has the greatest impact on the accuracy of the solution results of this method. According to the scope of the damping factor, the adaptive damping factor can be roughly divided into two categories. The first type of singular area does not define the effect of the damping factor. For example, the damping factor of the Gaussian distribution with a singularity as the expected value is used so that the damping term is small when it is far away from the singularity and has no significant impact on the entire approximation process. 6,7 The other most commonly used method is to determine the scope of the damping factor by defining a singular region so that the exact solution can be calculated using the normal method without having to solve the approximate value and the error in the non-singular region can be reduced. 8,9
When changing the adaptive damping factor, it is necessary to find an optimal value, which is known as the optimal damping factor and affects the performance and efficiency of the algorithm. The purpose of using an approximate solution is to make the terminal velocity norm as close to the expected value as possible while also making the velocity norm of the joint space a reasonable value. Thus, the problem becomes a problem of optimizing one nonlinear function under the constraints of another nonlinear function. Existing work has obtained the best damping factor through optimization functions, genetic algorithms and neural networks, all of which can obtain good results. 7,10 –12
The singularity of a closed-chain system is similar to that of a single manipulator. Park and Kim 13 described the basic singularity of a closed-chain system, where the singularity of the end effector is manifested by the inability of the end of the manipulator to generate velocity in a certain direction. This type of singularity depends on where the end coordinate system is established in the closed-chain system. Figure 1 shows two different positions of the end coordinate system of a planar closed-chain, where the X-axis points parallel to the end link, and the Y-axis follows the right-hand rule and is orthogonal to the X-axis in the plane.

Typical treatment of closed-chain singularity: (a) closed-chain end-effector singularity and (b) relocating the end coordinate system to the adjacent link.
When the end coordinate system of the closed chain is established at the position shown in Figure 1(a), the end coordinate system cannot generate velocity along the link direction under this configuration, and the system is at the singular point of the end effector. While the end-effector coordinate system is relocated at the position shown in Figure 1(b), the open-chain Jacobian of the manipulator becomes full rank, and the system can generate velocity in any direction along the plane; thus, the configuration is no longer the singular point of the closed chain to realize the traversal of the closed-chain singularity.
The above methods perform well in the singularity processing of a closed-chain system under the conditions of a simple environment and no obstacles. However, in recent years, more related studies have been conducted in complex environments, which require objects being grasped to have stricter obstacle constraints in the task space. Existing research can effectively solve such problems at the planning level. For example, by keeping a certain manipulator in a configuration and fixing the grasped object, the other manipulator generates a new joint configuration to realize the regrasp action, ensuring that the trajectory of the grasped object during the entire movement process coincides with the planned original expected trajectories. 14 –17 Furthermore, some studies have focused on the actual running time of the robot. They replan the path under environmental constraints based on known closed-chain singularities to avoid singularities. 18 –21 A summary of the above work shows that there are two optimization objectives for such problems: first, the manipulator needs to satisfy the complex obstacle constraints in the task space but does not necessarily require the system to strictly follow the expected trajectory and, second, to minimize the redundant motion of the system to reduce the total running time.
This study mainly aims at the application scenarios with complex obstacle constraints in the task space. Because there are many environmental constraints during the movement of object, it is difficult for the closed-chain system to avoid singularity by changing its trajectory when passing the constraints. For example, the object needs to pass through a narrow space close to its own size, or task constraints prevent the use of replanning to avoid singularity. Considering the above two optimization objectives, the main contributions of this study are as follows: Analyzing and constructing the Jacobian of the closed-chain system, and providing the discrimination method of the end-effector singularity according to the Jacobian rank. Improving the selection method of the adaptive damping factor and the optimization method of the best damping factor based on the DLS Jacobian pseudoinverse. Designing a closed-chain singularity avoidance algorithm based on the DLS Jacobian pseudoinverse.
Problem statement
This study addresses the singularity problem of a dual-arm closed-chain system, where the task space of the closed-chain system is no longer described according to the end of the manipulator but needs to be described according to the grasped object in a Cartesian coordinate system because of the existence of definite kinematic constraints at the end of the manipulators and the grasped object. Let the left manipulator end position qL be expressed in the Cartesian coordinate system as follows

where xL , yL , and zL describe the positions of the end of the left manipulator under Cartesian space, and RL , PL , and YL describe the poses of the end of the left manipulator under Cartesian space. The feasible set of these poses constitutes the workspace QL of the end of the left manipulator

Similarly, the workspace QR at the end of the right manipulator can be obtained. Assuming that the unreachable space at the end of the two manipulators due to obstacles or the volume of the clamped object is QE , the workspace Q of the clamped object in the closed-chain system can be described as follows

Given the desired path R of the clamped object in the task space Q, which contains information about the position and attitude of the clamped object, with a total of n path points, the desired path R is expressed as follows

where Si
denotes the ith path point. Assume that the kth path point Sk
in the given desired path R is a closed-chain singularity when at least one of the manipulators has a Jacobi matrix singularity. This leads to uncertainty in mapping the end velocity of the manipulator to the joint velocity. A definite joint drive velocity cannot be calculated. Therefore, the purpose of closed-chain singularity avoidance is to bypass the singularity Sk
in the task space and replace Sk
it with a new path point

where No need for full replanning of desired paths and no need for dual-arm systems to perform regripping actions, improving the efficiency in the planning and control stages. Avoidance is performed near singularities, and solutions in the joint space are acquired away from the singularities to avoid unnecessary errors between the actual path and the desired path in the task space. When performing singularity avoidance, the error between the derived replacement path and the desired path should be as small as possible to ensure overlap with the original desired path when the system is in motion.
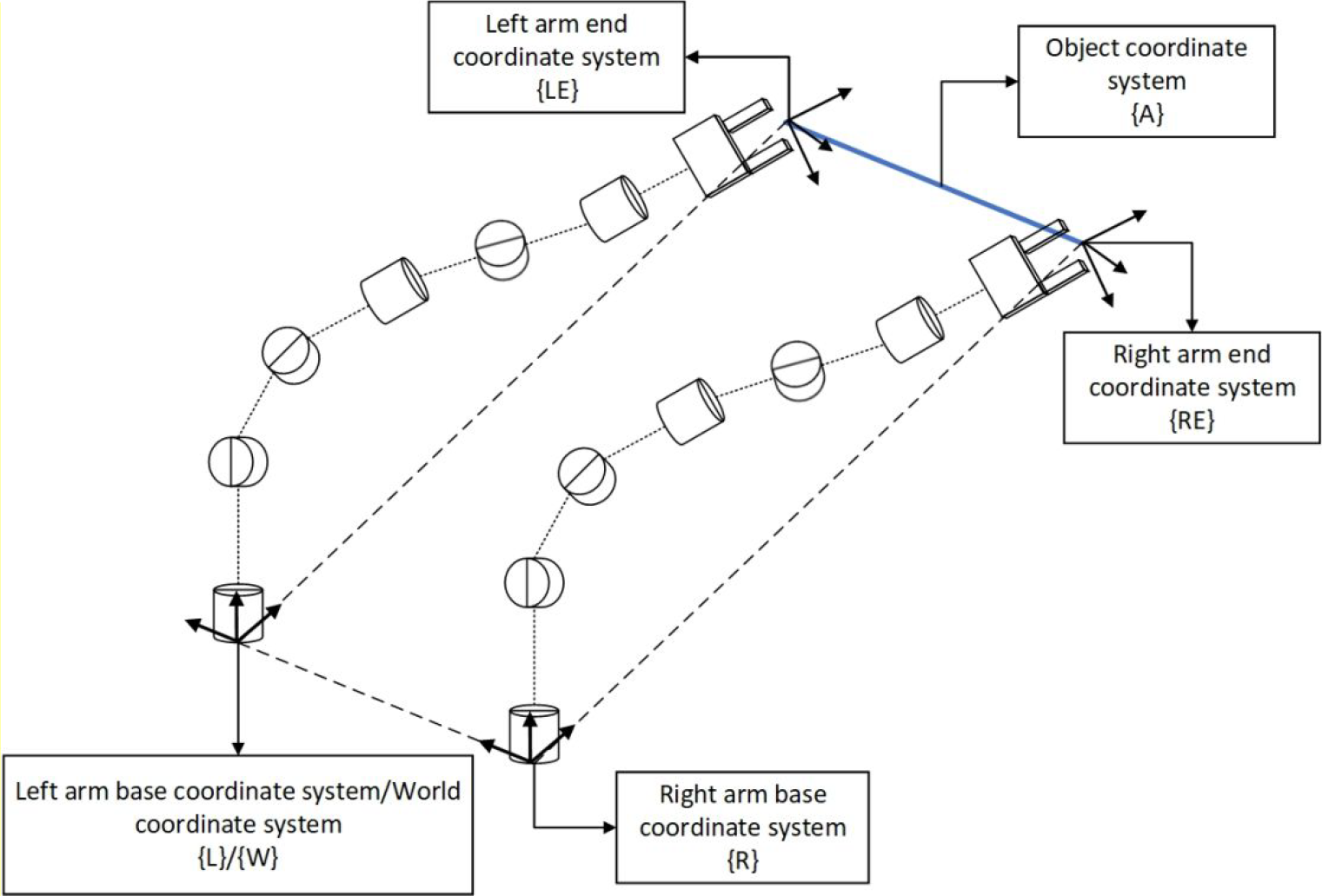
A simplified model of closed-chain system and main coordinate systems.
Proposed approach
Kinematic constraints on closed-chain systems
The closed-chain kinematic constraint is also known as the tight coordination constraint for dual-arm collaboration. It should be strictly observed by the closed-chain system during motion. In this study, the closed-chain system formed by two isomorphic 6-DOF manipulators clamping a rigid object is taken as the basic model. A simplified model of the closed-chain system is depicted in Figure 2.
In Figure 2, the coordinate system

Similarly, another variation relation is obtained from the rotational variation between the left and right manipulator base coordinate systems and the kinematics of the right manipulator

Both equations (6) and (7) describe the transformation between the world coordinate system

Construction of closed-chain Jacobian
According to the conclusion proposed by Park and Kim, 13 when the closed-chain system is at the end-effector singularity, the manipulator of the system located at the singularity is in the state of Jacobian under rank, whereas the other manipulator has a Jacobian full rank. Based on the above conditions, this study constructs a closed-chain system Jacobian that can determine whether the system is in a singular region.
Long et al. 22 analyzed and constructed a Jacobian for a dual-arm robot with the end velocities of the two manipulators in the closed-chain system being equal. According to the principle of vector superposition, it divides the terminal velocity into two identical new vectors with the same direction as the original vector, but half the size of the original vector. Two new vectors are used as end velocities for each two manipulators

where

where

where
As mentioned before, when the closed-chain system is at the singular point of the end effector, one manipulator is at the singular point but the other manipulator is not. At this time, the closed-chain Jacobian J is full rank, but JL and JR are not full rank. Therefore, we can determine whether the system is singular based on the Jacobian rank. When the system Jacobian satisfies

the closed-chain system is singular.
DLS Jacobian pseudoinverse and its optimization
This section introduces the DLS method for handling manipulator singularities and improves the method of varying the adaptive damping factor and the optimization finding method in it. First, equation (10) is described in general terms using the end velocity variable x and the joint angle variable q of the manipulator. Let

Typically, the Jacobian pseudoinverse is used to find the differential components of the joint angles when the number of driven joints is greater than the DOF of the system 23

where

where

In equation (15), the most important thing is to find the optimal damping factor, which directly affects the performance of the entire algorithm and its tracking error in practical applications.
25
When the damping factor
This work requires defining the singular region of the manipulator to determine the master and slave manipulators; thus, the adaptive damping factor is used, 8 and the variation in the damping factor is divided into three segments

where

In the original method,

where f represents the constrained function, g represents the nonlinear constraint and
Singularity avoidance algorithm for closed-chain system
This section presents the algorithm for closed-chain singularity processing, particularly closed-chain singularities, using equation (20). The algorithm first determines whether the system is singular and then determines which manipulator is in the singular region. Based on the singularity of the closed-chain system, the manipulator located in the singular region is considered the master manipulator, and the other manipulator is considered the slave manipulator. Then, the approximate solution of the master manipulator is solved by DLS. Finally, the slave manipulator velocity is

where D
1 and D
2 denote the singular region judgment coefficients, and when the system is in the singular region,

Closed-chain singularity avoidance algorithm flows.
The optimal damping factor was obtained by SQP in the previous section, and the method optimizes a function of the end velocity error in two parametric terms; thus, the process is one of error reduction through parameter optimization. To further reduce the error between the desired and solved paths and improve the accuracy of the solved path, this study adopts an accuracy improvement method that uses the velocity vector error as the correction quantity of the approximate solution. As depicted in Figure 4, the expected velocity vd
of the grasped object at the singularity and the recomputed velocity ve
are simplified and represented as two vectors, and the error

Velocity vector relationship at singularity.
Define the joint velocity vector je , which describes the joint velocity vector of the entire closed-chain system capable of yielding an end velocity ve

where

The above method calculates the error velocity vector
Experiments
In this study, Webots R2020a is used as the simulation platform. We call two ABB Irb4600-40 6-DOF manipulators from its robot model library so that the ends of both manipulators operate the same rigid object to form a closed chain. In the simulation environment, the rigid object is set as a 5 kg cuboid, and the robot and physical parameters are completely set according to the real world. Among them, the acceleration of gravity is set to
The four aspects of (1) adaptive damping factor improvement, (2) optimal damping coefficient and maximum singularity region finding, (3) singularity processing for the closed-chain system, and (4) cost time comparison are experimentally verified in this simulation environment. The numerical solution is obtained using MATLAB R2018a, and the calculated parameters such as joint angle and drive joint speed are written into the controller of the simulation platform. The simulation platform used in this study is depicted in Figure 5. The world coordinate system in the set task space is marked in the figure, with the red axis as the X-axis, the green axis as the Y-axis, and the blue axis as the Z-axis.

Webots simulation platform
Experiment on the effect of adaptive damping factor improvement
An improvement in the Jacobian pseudoinverse based on DLS is presented in section “Proposed approach,” and the results before and after the improvement are compared in this experiment. Let the maximum singular region be

Adaptive damping factor change curve before and after improvement.
Figure 6 shows that the improved damping coefficient has a significantly lower abrupt change in the change phase. In this experiment, assuming

Variation of joint velocity at singularity.
In Figure 7, the vertical axis is the joint velocity in
The solution effect before and after the adaptive damping factor improvement is compared in the singular region, and the comparison curve of the velocity change is obtained, as depicted in Figure 8.

Comparison of joint angular velocity variation curves at singular regions: (a) comparison of angular velocity variation in the second joint; (b) comparison of angular velocity variation in the third joint; and (c) comparison of angular velocity variation in the fifth joint.
The key parameters of the three joint angle variation curves before and after the improvement in Figure 8 are listed in the following three tables, containing the maximum velocity variations at the adjacent path points and the joint angle error caused by the velocity variation.
Comparison of parameters before and after the improvement in the second joint.

Comparison of parameters before and after the improvement in the third joint.

Comparison of parameters before and after the improvement in the fifth joint.

From Tables 1, 2, and 3, after changing the variation curve of the damping factor from a quadratic polynomial to a cubic polynomial, the variation in the joint angular velocity at the singularity is smoother than that before the improvement. In addition, the improved method produces less error in the singular region, as indicated by the joint angle error caused by the velocity change in the table.
Optimal damping coefficient and maximum singularity region search experiments
Based on the existing work, the optimal damping factor is set to

Optimization effects of three quadratic programming methods on damping factor: (a) Active Set optimization effect; (b) Interior-Point optimization effect; and (c) SQP optimization effect.
In Figure 9, the horizontal axis represents the number of iterations and the vertical axis represents the value of the function being optimized. To more intuitively compare the optimization effects of the three types of secondary planning, the parameters in the above figure are presented in the form of a table. The parameter types include the resulting optimal damping coefficient, end velocity error parametrization, and the number of iterations, as listed in Table 4.
Comparison of parameters of three secondary planning methods.

According to the data in Table 4, although the Active Set has fewer iterations, the results obtained from its iterations are not optimal solutions. Both Interior-Point and SQP can obtain the optimal solution, but the number of iterations of SQP is relatively small. This means that its solution is more efficient than that of Interior-Point.
Experiments on singularity processing for closed-chain systems
This experiment implements the proposed singularity avoidance algorithm of the closed-chain system in the simulation platform and demonstrates the simulation effects of the closed-chain system for singularity avoidance. A sine function path in the world coordinate system in the task space is selected so that its midpoint is at the singularity of the left manipulator, as depicted in Figure 10.

Expected path in task space.
All axes in Figure 10 are in meters. In the task space, the starting point is
All axes in Figure 11 are in meters. Because the algorithm makes the error at the singularities small, the path in Figure 11 is almost identical to the expected path. Taking the singularity as the center to observe its neighborhood, the six-dimensional position change of the path is enlarged and compared with the desired path, and the result is obtained, as presented in Figure 12.

Three views of the actual path of the object: (a) X-Y plane view; (b) X-Z plane view; and (c) Y-Z plane view.

Comparison of the expected and actual poses in singularity neighborhood: (a) Y-axis position; (b) X-axis rotation; and (c) Z-axis rotation.
Although more pronounced, the errors in the 3-DOFs shown in Figure 12 are still of a minute order of magnitude. The average error of the Y-axis position in Figure 12(a) is

Closed-chain system operation process in simulation environment
Cost time comparison
To further verify the advantages of our method, we carry out the comparative experiments for the following three methods: The DLS-based singularity avoidance algorithm proposed in this article. The method of avoiding singularities through path replanning: The robot strictly follows the expected path while it moves in a non-singular region. When running to a singular area, we first delete some path points belonging to the singular area in the expected path, and regard the singular area as an obstacle in the task space, then replan the path in this area and its neighborhood through the RRT algorithm, and detect whether the planned path intersects with the singular area until a feasible path is generated. The method of traversing singular points by regrasping: When the manipulator reaches the singular point, the end effector cannot generate velocity due to the loss of a DOF in one direction. Based on the method in the study of Xian et al.,
18
the configuration of a certain manipulator in the closed chain is changed by regrasping the object, thus leading to the variation of the closed-chain Jacobian to realize the traversal of the singularity.
The time spent on closed-chain singularity processing mainly includes the motion planning time at the singular point and the execution time of the manipulator. The time spent by the above three methods to deal with the closed-chain singularity is shown in Table 5.
Cost time comparison.

It can be seen from Table 5 that the planning time of method B is relatively long, and the execution time of the robot increases due to the increase in the length of the path generated by replanning compared to the expected path. Method C costs slightly less time in the planning phase, but the execution time of the robot increases due to the configuration variation of a certain manipulator during the regrasping process. The total time cost by method A is the shortest.
Conclusion
This article investigates and solves the problem of end-effector singularities during the motion of a grasped object in a closed-chain system that should follow an expected path. First, for the singularity judgment problem of the closed-chain system, a method of discriminating the singularity point of the end effector according to the rank of this Jacobian is presented. Then, the adaptive damping factor is improved by a cubic polynomial, and the parameters are optimized by SQP. Singularity avoidance is finally achieved by designing a closed-chain singularity avoidance algorithm based on the DLS Jacobian pseudoinverse. Future work includes: In this work, the optimal damping factor and the maximum singular region are determined by quadratic programming, where the threshold value of joint velocity variation parametrization as a constraint is selected empirically. We would like to find the optimal value of this threshold by optimization which allows a more accurate iteration of the optimal damping factor and the minimum singular region. We verified the feasibility and effectiveness of the proposed method in the experimental validation phase through a simulation platform. In the future, the effectiveness of the method needs to be verified on a physical object.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the Shandong Provincial Natural Science Foundation (ZR2022MF296), the National Natural Science Foundation of China (62073191), and a Project of Shandong Province Higher Educational Youth and Innovation Talent Introduction and Education Program.