
Abstract
Machine tools based on a Stewart platform are considered the machine tools of the 21st century. Difficult problems exist in the design philosophy, of which forward displacement analysis is the most fundamental. Its mathematical model is a kind of strongly nonlinear multivariable equation set with unique characteristics and a high level of difficulty. Different variable numbers and different solving speeds can be obtained through using different methods to establish the model of forward displacement analysis. The damped least-square method based on chaos anti-control for solving displacement analysis of the general 6-6-type parallel mechanism was built up through the rotation transformation matrix
1. Introduction
It is very difficult to obtain the forward displacement of the moving platform of parallel robots since the ability to realize pose is strongly coupled. Generally, a 6-6-type parallel mechanism is a Stewart mechanism, whose upper and lower platforms are flat arbitrary hexagons connected with six sliding pairs with spherical pairs at both ends. Obtaining forward displacement ultimately boils down to solving a set of nonlinear equations. Solving these equations is extremely difficult, which becomes another problem of the mechanism after completing the displacement analysis of the space 6R series mechanical arm [1]. Since D. Stewart first proposed the complete concept of the parallel mechanism and applied it to the moving platform of a flight simulator in 1965, the kinematics, the mechanism and the controller of the Stewart platform have aroused much interest [2–4]. The platform brings many advantages, such as strong rigidity and high accuracy with six DOFs. A machine tool based on a Stewart platform may be considered the machine tool of the 21st century. Difficult problems exist in its design philosophy, and the kinematics problem of the Stewart platform is the most fundamental [5]. This problem relates to the mechanism in the robotics, and to algebraic geometry, differential geometry, symbolic computation and numerical computation in the mathematical aspect. In the mathematical model of the Stewart platform, there is a class of strongly nonlinear multivariable algebraic equations which are extremely difficult to solve, since nonlinear science is at the forefront of technological development. Because of the high level of difficulty of the mathematics, machine tools with Stewart platforms are known as being “manufactured by mathematics”, and this has become one of the 100 most central problems in interdisciplinary science [5]. A breakthrough in solving this problem will be an important milestone in algebraic equation solving, robot operating and machine tool designing.
Methods to solve forward displacement in Stewart platforms generally include analytic methods and numerical ones. Analytic methods for finding the closed form of the forward displacement can give the exact solution, but they often generate intermediate polynomials that are too large for the calculation to proceed [6]. Different techniques have been used to obtain the estimated number of solutions, some of the real solutions, and closed forms of some special configurations for the forward kinematics of the Stewart platform, but there is still a long way to go before completely acquiring all the real solutions of the equations [7–13]. Numerical methods applied to the Stewart platform mainly include the Newton-Rapbson iterative method (referred to as NR method) [14], the homotopy method [15–17], the chaotic method [18], the neurons algorithm [19], and the additional sensor method [20]. There is no need to solve the complex high-order nonlinear equations when using the NR method. But, in the NR method, the calculation speed is unstable, and both the convergence of the calculation results and the speed of convergence depend on the initial values. The homotopy and neurons methods can work out a complete solution, but this requires a large amount of calculation. The additional sensor method uses the necessary number of additional sensors and a certain arrangement to simplify the solving process of forward displacement position. However, the simple additional sensor method is very demanding given the processing error; it is also difficult to conduct the platform structure calibration because of the assembly in platform parts. In the mathematical model of the Stewart platform, there is a class of strongly nonlinear algebraic equations with multiple variables. Different methods establishing forward displacement can obtain different variable numbers and different solving speeds of the nonlinear equations. Researchers around the world have long wrestled with this problem. C.G. Liang [21] and W. Lin [22] obtained forward displacement of the triangle and quadrangle platform-type parallel robot with coincidence hinges, respectively; C.D. Zhang [23] obtained forward displacement of the hexagonal platform-type parallel robot. Compared with platform type, 3-D type can effectively avoid the interference with branch chains and extend the working space of the moving platform and the swing range of the attitude angle. However, it exacerbates the coupling of the pose in the moving platform and makes it more difficult to obtain forward displacement. Three independent equations that take the positive angles of the moving platform as the variables were established based on the basic constraint equations of the parallel robot, intermediate variables and mathematical processing in Matlab [24]. The nonlinear equations whose forward displacements are four variables in a platform-type parallel mechanism were set up [25], and nonlinear equations with seven variables in a 3-D parallel mechanism were built [26].
The chaos method described in [18] supposed that the points of Julia centralization in the Newton iteration method would appear in the neighbourhood where the Jacobian matrix determinant of the equations is equal to zero. However, this supposition has not been proved. The symbolic expression of the multivariable Jacobian matrix determinant first needs to be found. Then, all the variable values except one need to be determined. Finally, the chaos zone is searched for the undetermined variable. It is quite complicated to solve the matrix. Chaotic sequence method is a new kind of solving method in which the initial point of Newton iteration is generated using the chaotic and hyper-chaotic system, whereby all the real solutions on the mechanism synthesis can be effectively solved [27–29]. However, the Henon hyper-chaotic Newton iteration method cannot solve the mechanism synthesis problem of 6-SPS. When the solutions are not convergent using the Newton or quasi-Newton method, the mathematical programming method can be adopted [30]. The mathematical programming method with the hyper-chaotic system was put forward to solve the synthesis problem of 6-SPS, and the problem was transformed into nonlinear equations with six variables [31]. The Henon super-chaotic sequence combined with the Newton downhill method created the super-chaotic Newton downhill method to solve this problem, which was transformed into nonlinear equations with nine variables [32]. The quaternion method was used to establish nonlinear equations in the synthesis problem of 6-SPS with eight variables, and was solved by using the hyper-chaotic neural networks damped least-square method, where the hyper-chaotic neural network produces a hyper-chaotic sequence as the initial iteration value in the damped least-square method [33].
In this paper, the nonlinear equations with nine variables on forward displacement in the general 6-6-type parallel mechanism were built up through the rotation transformation matrix
2. Chaotic anti-control of rigid motion
Chaos and unpredictability are often advanced as arguments by postmodernists who wish to attack science. Chaos does reveal a basic limitation as to what science can achieve. However, knowing one's own limitation is not unscientific but essential to science. It is also important to see how self-knowledge is attained, and what capacities are made possible in the process.
Dynamics is as old as Newton. However, classical dynamics mainly focuses on individual processes obtained by solving dynamic equations with specific initial conditions. A process is nothing but a temporal succession of consecutive steps, each determined by its predecessor. Classical dynamics lacks the conceptual means to represent phenomena such as chaos or bifurcation. Chaos in mathematics means extreme sensitivity to initial conditions, i.e., minute differences in the initial conditions are amplified exponentially. Given an initial condition, the dynamic equation determines the dynamic process, i.e., every step in the evolution. However, the initial condition, when magnified, reveals a cluster of values within a certain error bound. For a regular dynamic system, processes issuing from the cluster are bundled together, and the bundle constitutes a predictable process with an error bound similar to that of the initial condition. In a chaotic dynamic system, processes issuing from the cluster diverge from each other exponentially, and after a while the error becomes so large that the dynamic equation losses its predictive power.
Modern dynamics goes much further. It introduces an expansive conceptual framework that includes processes for all possible initial conditions, and if a system depends on a set of parameters, its behaviours for all values of the parameters. The framework summarizes all these possible behaviours in a portrait in the system's state-space or phase-space. The state of a dynamic system is a summary of all its properties at one moment in time, and a process is a sequence of states whose succession is governed by the dynamic equation. The state-space is the collection of all the states that a system can possibly achieve. It has become one of the most important concepts in all the mathematical sciences.
Dynamical equations are already generalizations, and each equation governs a class of dynamical systems. Solving one of these equations requires an initial condition. Classical dynamics does not generalize about initial conditions, whose value for each case is assigned “from outside.” Modern dynamics generalizes about an initial condition by making it a theoretical variable internal to the state-space representation. This broadened theoretical framework enables scientists to introduce new concepts for dynamical processes with various initial conditions. Chaos and attractors are examples of such novel concepts. By internalizing initial conditions instead of receiving them “from outside,” dynamical theory attains a higher level of generality. Its scope expands from individual processes to processes with all possible initial conditions. Further generalization and scope expansion are on the way. Let us return to the logistic equation
Logistical processes have an attractor A, whose behaviours change with d, not only quantitatively but qualitatively. For
Unlike the logistical system, which has only one attractor, many systems have several attractors. The state-space of such a dynamical system divides into many basins of attraction, separated from each other by separatrices, which, like continental divides, separate a continent into several drainage basins. Processes initiating from conditions that fall within an attractor basin all converge on the same attractor, just as rains dropping in a drainage basin all converge on the same river.
Attractors and bifurcation are not merely mathematical curiosities; they play significant roles in science. An attractor represents the long-term and steady behaviour of a dynamical system, when perturbations represented by various initial conditions die down. Such steady behaviours are interesting to scientists. For instance, a dynamical system with many attractors can represent the cognitive process by which an animal distinguishes odours. Initial conditions in the system represent stimuli to the nose. Stimuli come in infinite varieties, depending on complicated source and environmental conditions. Because of cognitive dynamics, they separate and settle into different attractors, each representing a different odour. The animal is aware not of the dynamics but only of the final attractor, or the odour that it recognizes. However, cognitive scientists are most interested in its unconscious cognitive processes.
As an animal grows, it may develop a keener sense of smell and the ability to distinguish more odours. Such development can be represented by bifurcations, or changes in the pattern of attractor basins. Like geological upheavals changing the landscape and creating more drainage basins, a new attractor basin may appear in the animal's cognitive dynamics. In such models, the control parameters whose changes engender bifurcation can represent the animal's growing physiological conditions.
Of course, one must be careful about changes in control parameters. Mathematically, the control parameters must be constants in the solution of a dynamical equation; otherwise, we get a different equation. However, we can approximately consider two time-scales, one much longer than the other. Smelling an odour takes a few seconds; developing a better sense of smell takes months if not years. Thus, even when an animal is growing, since the growth rate is relatively slow we can regard the control parameters of its cognitive dynamics as constants for the duration of the smelling process. It is an approximation, but approximations based on reasonable scales of magnitude prove can be fruitful.
Chaos control can suppress or eliminate chaotic dynamical behaviour. Making a non-chaotic dynamical system chaotic, or retaining (or enhancing) the chaos of a chaotic system, is called “anti-control of chaos or chaotification” [34]. This means chaotic anti-control could be mainly described as the original non-chaotic system becoming chaos or chaos of the original system becoming stronger through the external input or the adjustment in internal parameters. To realize the control and anti-control of chaos, the controller should be designed as simple as possible in order to be low-cost, easy to realize and convenient to use. It is an engineering design problem to look for a chaos generator to realize chaotic anti-control. Whether a simple and strict chaos controller is designed successfully reflects the level of the mathematics and the capability of the engineering design [34, 35]. Feedback control is one of the basic methods for control and anti-control of chaos. The linear feedback controller is one of the simplest controllers which can realize chaotic anti-control. Using Lyapunov exponents of control or anti-control of chaos is an effective way of describing chaotic properties of nonlinear systems. The number of Lyapunov exponents is equal to
The Euler equations for motion of a rigid body with principle axes at the centre of mass were given in [34, 35] as
where

Suppose

The qualifications when the system produces chaos are as follows [35]:
or
or
or
Select

Strange attractor of system

Lyapunov exponent of system
3. The least-square method of nonlinear equations
Take the nonlinear equation
Its solution is
Choose initial value x0;
Execute iteration based on the formula (4);

where
Many scholars have proposed improved algorithms to solve the above problem. The most famous is the damped least-square method (L-M algorithm). C.X. Zhan presented a new method which is more effective than the L-M algorithm based on this algorithm, and whose convergence rate is faster. Adopting this method, the basic idea is expressed as follows:
Let

where
4. The damped least-square method based on chaotic anti-control of rigid motion
The common system is transformed into the chaos system through chaotic anti-control, and chaotic sequences are produced by using a chaos system to obtain all solutions of the mechanism equations expressed with the vector
Selecting the system parameters according to Eq. (2) and its generating conditions, we can construct hyper-chaos sets
Suppose that the interval of variable
Take
5. Mathematical modelling of forward displacement
The structure diagram of the general 6-6-type 3-D parallel mechanism is shown in Fig. 3. In this mechanism, the upper plane is connected to the lower by six branched chains with ball joints and sliding pairs. The fixed coordinate system
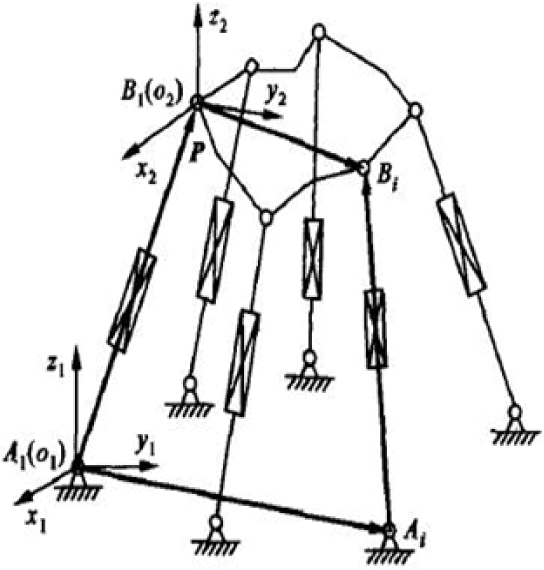
Structure diagram of the general 6-6-type 3-D parallel mechanism
According to the condition of the rod length, the following equations can be obtained:


where

After substituting Eq.(3) into Eq.(2) and expanding Eq.(2), we can obtain the equation as:

where






Through Eqs. (12)–(14),
6. Numerical example
In Fig. 3, the coordinates of point
Put the data into
Four examples of real solutions

Corresponding initial values of the four real solutions

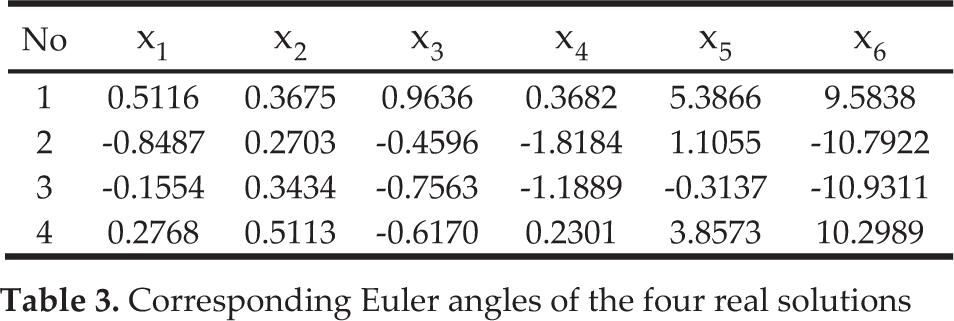
Corresponding Euler angles of the four real solutions
Four examples of real results based on quaternion hyper-chaotic damp least-square method

If we use a Hénon hyper-chaotic system to produce hyper-chaotic sequences, it will take 8.5s to find all solutions based on the hyper-chaotic least-square method [36, 37]. The results are shown in Tables 5, 6 and 7. Tables 1 and 3 are in fact the same as Tables 5 and 7, the only difference being in the order of solutions and corresponding initial values. Different nonlinear equations behave differently. Different methods establishing nonlinear equations for the forward displacement problem can obtain different variable numbers and different solving speeds of nonlinear equations. Selecting appropriate methods to build nonlinear equations around the mechanism problem, as well as selecting appropriate chaotic or hyper-chaotic sequences, can help solve the nonlinear equations fast.
Four examples of real solutions based on hyper-chaotic least-square method

Corresponding initial values of the four real solutions based on hyper-chaotic least-square method

Corresponding Euler angles of the four real solutions based on hyper-chaotic least-square method

7. Conclusions
The nonlinear equations with nine variables on forward displacement in the general 6-6-type parallel mechanism were built up through the rotation transformation matrix
Footnotes
8. Acknowledgments
This research is supported by the National Natural Science Foundation of P.R. China (No:51075144), the grant of the 12th Five-Year Plan for the key discipline programme (Mechanical Design and Theory) in Hunan province (XJF2011[76]) and the Hunan Provincial Natural Science Foundation of China (No:13JJ8023).