
Abstract
Manipulator is often impacted by singularity caused by joint configuration in execution process of precise tasks. Traditional singularity analysis method mainly depends on analytical modeling and geometric analysis, but both adaptability and real-time performance are restricted in dynamic changing environment or under complex joint configurations. Therefore, a kind of high-precision singularity prediction method for manipulator based on adaptive damped least-squares is proposed in this thesis. First, a kind of rotary wedge–type manipulator model suitable for the alignment of high-precision optical components is designed and established, and its positive kinematic solution is derived. Later, the adaptive damped least-squares is introduced to achieve its inverse kinematics solution. Tracking accuracy and singularity avoidance capability are effectively balanced via adaptive mechanism to effectively control the motion of manipulator under the singular configuration. Finally, singularity prediction ability of the method proposed on the specific trajectory of manipulator is verified via simulation and experiment. The results indicate that such method can effectively and accurately identify and forewarn potential singular interval, thus optimizing the path planning of manipulator. Such research provides a kind of new technical approach for the singularity analysis and avoidance of manipulator with complex configuration in dynamic environment, which significantly enhances the motion stability and environmental adaptability of the robot in high-precision operation tasks.
Keywords
Introduction
With the continuous development of robot technology, the application of manipulator in the field of automated production, precise operation, etc. has increasingly widespread. However, the singularity problem of manipulator has always been one of the challenges confronted by robot.1,2 Manipulator singularity often happens in its joint configuration, leading to Jacobian matrix degradation, loss of freedom of motion, even the control system can't work normally. Traditional singularity analysis method is mainly obtained via geometrical analysis, damping factor, etc., but these methods are usually only applicable to the static analysis and can't effectively handle complex tasks or dynamic environment.3,4 Therefore, how to identify and avoid the singular configurations that manipulator may encounter during task execution accurately and in time becomes the current research hotspots and technical bottlenecks in the field of robot motion control and path planning.
To address the singularity prediction problem, some studies attempt to use the method based on geometric analysis to analyze the manipulator singularity. To enhance the performance of current control and motion planning strategies of manipulator, Zaplana et al.5,6 proposed new singularity prediction method based on geometric analysis which centers on identifying the concrete configurations which would cause the outer product of these helical quantity is zero. Once these singularities are confirmed, the distance function could be defined in configuration space. The function's restriction on the set of singular configurations can calculate the distance between arbitrary configuration and specific singular point. To confirm the singularity of multiring coupling mechanism, Xiao et al. 7 and Guo et al. 8 proposed a kind of general method based on geometric algebraic analysis. Singular polynomial of multiring coupling mechanism is derived from the union of all basic branch chain constraint spaces, and the singular polynomial is analyzed to obtain all singular configurations in the global coordinate system. The method proposed is simple in calculation and clear in physical meaning. Some common senses of research adopt the method of damping factor to avoid the singular point. Nakamura and Hanafusa, 9 Wampler, 10 and Maciejewski and Klein 11 adopt the damped least-squares to solve the problem of differential inverse kinematics. The method can implicitly remove the degenerate motion component and can obtain well-defined and numerically stable approximate solution in the entire working space of manipulator by virtue of relatively small computational quantity. Stefano Chiaverini and Kanestrom 12 adopts the weighted damping least squares inverse kinematics method and allows the existence of relatively low tracking performance in other directions when guaranteeing high-precision motion of manipulator by weighing the tracking accuracy and the feasibility of joint movement generated. Some researches attempt to predict the singularity of manipulator using the trajectory planning method. For multistage continuous manipulator, Bai et al. 13 proposed a kind of new modal motion theory method to overcome the singularity problems generated by piecewise constant curvature kinematic modeling method, and configuration parameters are restricted via constraint function, thus achieving the control of precise shape of multisegment robotic arm. Simulation results indicate that the trajectory planning algorithm proposed is effective for multistage continuum manipulator. To simultaneously achieve the trajectory tracking of end effector and the attitude stability of spacecraft, Lu and Jia 14 constructed a kind of novel spacecraft attitude stability constraints with time-varying attenuation terms and time-varying gain parameters to simultaneously meet the constraint conditions of joint angle/speed/acceleration and the trajectory tracking requirements of end effector. The trajectory planning algorithm proposed can avoid the dynamic singularity of free-floating space manipulator. As computer optimization algorithm makes breakthrough progress in multiple fields, some researches attempt to utilize optimization algorithm to achieve the classification or regression prediction of singular configuration. For example, in order to improve the performance of particle swarm optimization algorithm in search for global optimal solution, Deng and Xie 15 proposed a kind of adaptive inertia weight strategy to adjust the velocity of particles. Two serial robots’ manipulators are used to test the performance of adaptive particle swarm optimization algorithm. The results indicate that the method proposed can effectively and accurately address the inverse kinematics problem of multi-degree-of-freedom manipulator. To address the possible singularity problem existing in Jacobian matrix of manipulator, Hernandez-Barragan et al.16–18 designed a kind of novel objective function and presented how to perform normalization processing to each objective function to construct the weighted objective function. The results show that the method can effectively combine position and joint targets and address the path tracking problems in the absence of singular points.
With the rapid development of machine learning and related fields, some research efforts have attempted to employ machine learning-based approaches to achieve joint control in manipulator. Sveen et al. studies motor joint control of a 4-degree-of-freedom robotic manipulator using learning-based Adaptive Dynamic Programming (ADP) approach. The manipulator's dynamics are modeled as an open-loop 4-link serial kinematic chain with four degrees of freedom. Experimental results show that four independent optimal controllers are found, each under similar exploration strategies, and the proposed ADP approach successfully yields optimal linear control policies.
However, in a high-dimensional space, certain limitations still exist in computing efficiency and real-time performance of the methods as mentioned in the above researches. Besides, the adaptability of the above methods in dynamic environment needs to be further enhanced. When environment changes, such as the pose change and blocking interference of target object, or fluctuations in sunlight conditions, the existing method may not track target stably, leading the reduction of positioning accuracy of manipulator. Therefore, how to optimize the computing model to improve real-time performance and to enhance system's adaptability to complex dynamic environments is the key challenge for further development of the above method.
In this article, singularity prediction focuses on early identification, quantitative assessment, and construction of early warning criteria for potential singular states before the system enters the singularity region. The core objective is to determine whether the system is approaching a singularity point and how severe the singularity is. On the other hand, singularity avoidance is an online adjustment strategy at the control level, primarily addressing how to stably pass through the singularity region when it is approached or entered. The method proposed in this article does not merely passively suppress singular values near the singularity point. Instead, it achieves early discrimination of potential singularity regions through a joint analysis of the evolution law of adaptive damping coefficients and the singularity proximity index. This mechanism enables the damping parameters to change before traditional DLS takes effect, thus achieving earlier intervention in the time dimension.
Geometric modeling
Rotary wedge–type manipulator
A kind of rotary wedge–type six-degree-of-freedom manipulator is proposed in this thesis, as shown in Figure 1(a)). Compared with traditional cantilever type manipulator, such manipulator adopts rotary wedge configuration which optimizes the force state of joint so that each joint mainly bears overturning moment rather than torque upon working. Such innovative design effectively improves the manipulator's structural stiffness, load bearing capacity and stability, owns good characteristics of obstacle avoidance and singularity avoidance, and can meet the alignment of high-precision optical components and the ground testing requirements for interferometers. Besides, confined to positioning accuracy, weight, and working range, this research doesn't adopt ball-wrist manipulator structure. However, such configuration's Denavit–Hartenberg model (D-H mode) parameters are different from traditional manipulator, and its inverse kinematics solution is more challenging because it is difficult to directly find a group of independent and unrelated variables via analytical method. To address the above problem, the inverse kinematics solution method will be deeply researched in this thesis to improve the calculation efficiency and the motion accuracy of manipulator.
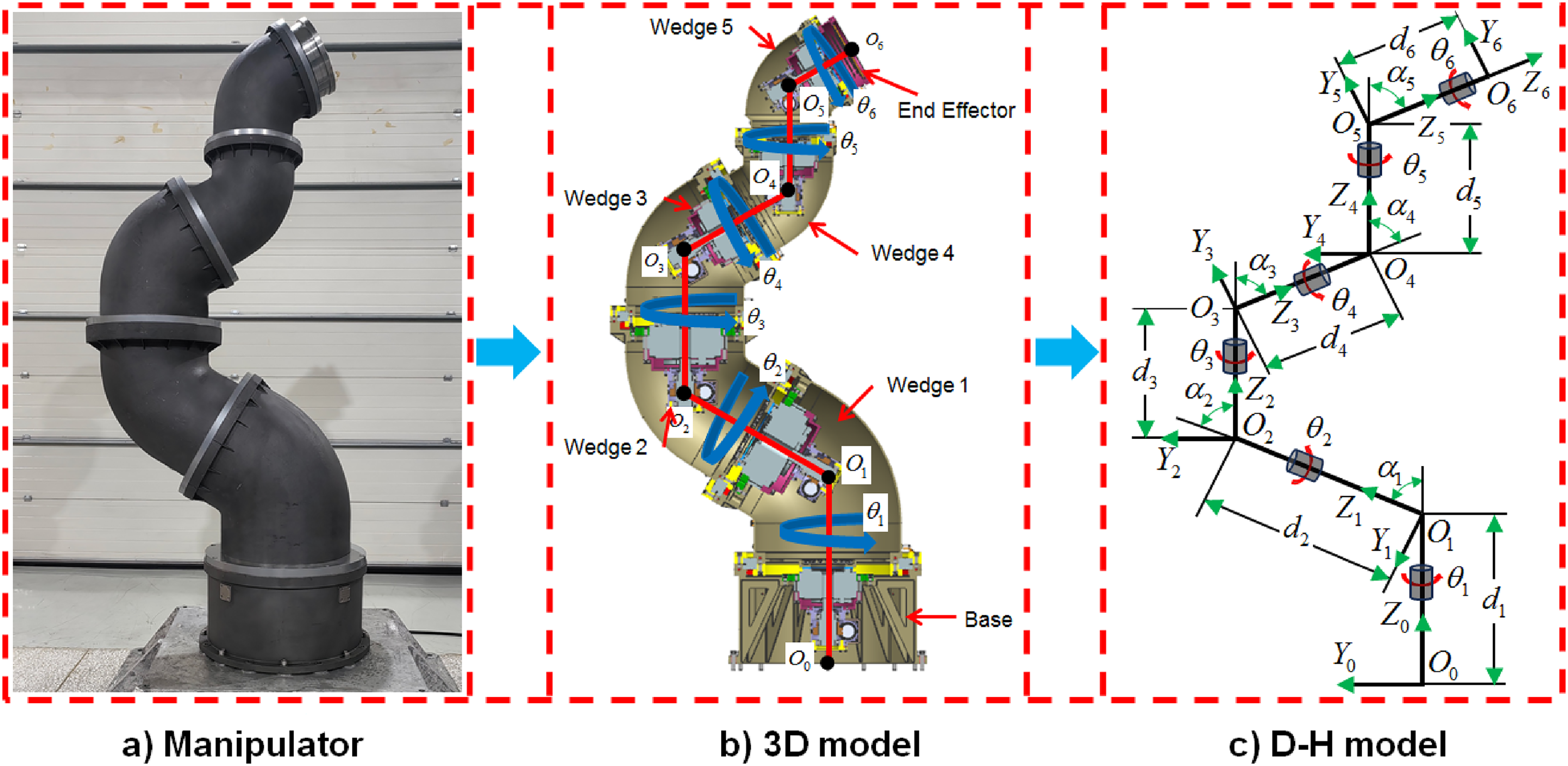
Rotary wedge–type six-degree-of-freedom manipulator and its D-H model.
The rotary wedge–type manipulator, characterized by its nonstandard kinematic joints and geometric complexity, may encounter fabrication feasibility and cost-efficiency challenges. However, the rotary wedge–type manipulator is primarily designed for the assembly and adjustment of high-precision, small-batch optical components, rather than for general industrial robots or large-scale production environments. The original intention of designing this mechanism is to enhance the precision of attitude fine-tuning, rather than pursuing low cost or standardization. Through modular design and precision machining techniques, it is possible to reduce manufacturing difficulty while ensuring accuracy, which is beneficial for long-term maintenance. Therefore, the rotary wedge manipulator proposed in this article possesses reasonable manufacturing and maintenance feasibility in its target application scenarios, while large-scale industrial production is not the focus of this study.
Operating principle of rotary wedge–type manipulator
Schematic diagram of rotary wedge–type six-degree-of-freedom manipulator joint is shown in Figure 1(b)), including base, joint, wedge, and end effector. There are six joints and five wedges. The torsion angle between wedge's horizontal connecting plate and inclined connecting plate is between 60°and 70°. All reducers transform motor's high-speed and low-torque output into the low-speed high-torque output needed by joints to achieve the rotation of all joints. The rotation of all joints of manipulator changes the normal direction of each inclined connection plate, and the posture of joints above each wedge adapter changes accordingly. The end effector reaches the specified pose via joint effect of all joints.
Different from traditional manipulator, such manipulator is free of singular point such as wrist singularity, elbow singularity, and shoulder singularity, owns good singularity avoidance and obstacle avoidance performance and can better achieve compliant control.
Mathematical modeling
Manipulator D-H model
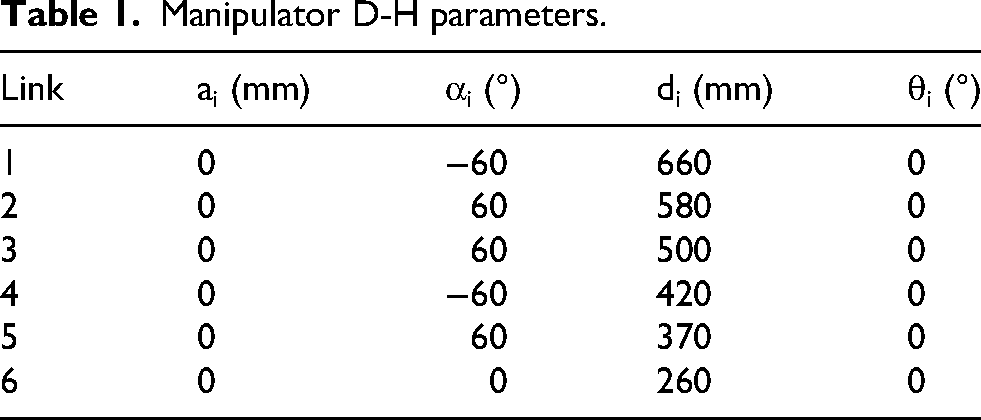
To research the motion of manipulator, its kinematic model shall be established, and then forward and inverse kinematics are solved via kinematic model. Generally, joint coordinate system is established and manipulator entity is abstracted in Mathematical method to describe the position and posture of relative base coordinate system of manipulator. The general modeling method of D-H parametric kinematics is adopted for modeling.19–22 The D-H model of six-degree-of-freedom rotary wedge–type manipulator is shown in Figure 1(c)), and parameter table is shown in Table 1. The i = 1, 2, 3, 4, 5, 6, in which
Manipulator D-H parameters.
The D-H method is applied to obtain the forward kinematic equation of rotary wedge–type manipulator, as shown below:
wherein the rest can be deduced in the same way.
Positive kinematic solution
Positive kinematic solution of manipulator means that the pose Q of relative coordinate system {0} of coordinate system {6} is solved based on the joint angle vector
It can be known from Formula (1) that,


Assuming the homogeneous transformation matrix of relative base coordinate system {0} of end effector coordinate system {6}:
Six-dimensional pose vector of corresponding end effector is
wherein 1 indicates the position of end effector, 
A and T is equal in corresponding item, then
Pose Q is the positive solution expression of kinematics.
Inverse kinematics solution
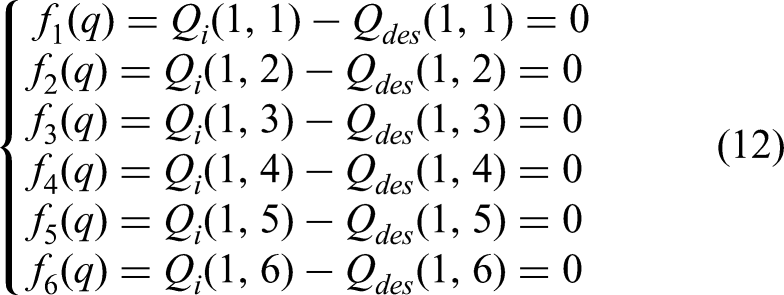
Newton's iterative method is utilized to solve the inverse kinematics solution1,23–25 of six-degree-of-freedom manipulator, and the nonlinear equation system is first formulated:
The target pose of the end-effector coordinate system {6} relative to the base coordinate system {0} is known
For each round of iteration, the current end-effector pose vector 
As per the formula, the equation set's Jacobian matrix can be confirmed as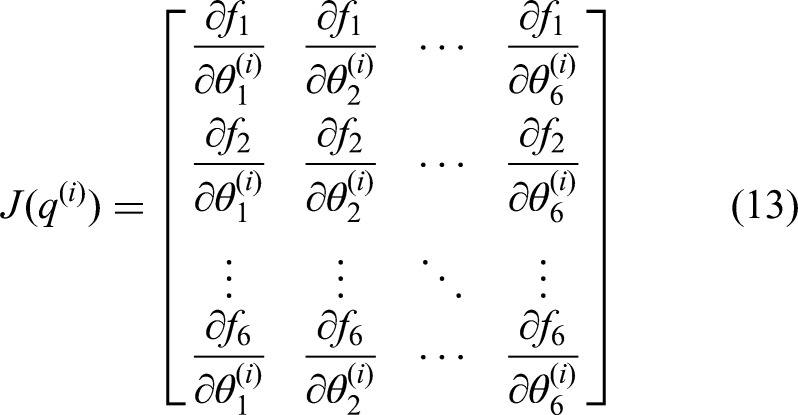
Newton's formula solving equation set is
Numerical method algorithm flow of manipulator is shown in Figure 2.

Numerical method algorithm flow of manipulator.
Statistical analysis reveals that the repeated singular value decompositions (SVD) and iterative updates during a single control cycle accumulate to a total computational duration of 0.3 s. While this marginally exceeds the computation time benchmark of industrial robots, it remains compliant with the operational requirements specified for optics assembly scenarios discussed in this study.
It should be noted that the analysis of real-time performance in this article is mainly based on the online closed-loop operation results of the experimental system, focusing on verifying that the proposed method can operate stably in the actual control loop and meet the control cycle requirements, rather than conducting extreme computing performance tests on specific hardware platforms. Therefore, indicators such as absolute computation time per iteration and CPU utilization have strong platform dependencies, making it difficult to conduct fair comparisons between different experimental environments.
Kinematic Jacobian matrix of manipulator
The transformation of manipulator between pose motion speed and joint angular motion speed is called the kinematic Jacobian matrix of manipulator,26–29 namely
wherein J refers to the kinematic Jacobian matrix of manipulator, with expression formula as given in equation (16):
Simulation and experiment of inverse kinematics solution
Simulation analysis
The simulation method is utilized in this section for verification of kinematic model of manipulator to guarantee the correctness of inverse kinematics solution. As per the D-H parameter table in the above, Robotics toolbox30–32 in Matlab is used to establish the simulation manipulator model, as shown in Figure 3 (all joint angles are zero). The axes X, Y, and Z in the figure indicate the position of end effector of manipulator in direction (unit: m) of X, Y, and Z.

Simulation model of rotary wedge–type manipulator.
In the forward kinematics calculation, refer to Table 2 for 18 groups of test points set in details, and refer to Figure 4 (unit: m) for the corresponding manipulator simulation model of test point in details. The letters a to r correspond to Test 1 to Test 18, respectively.
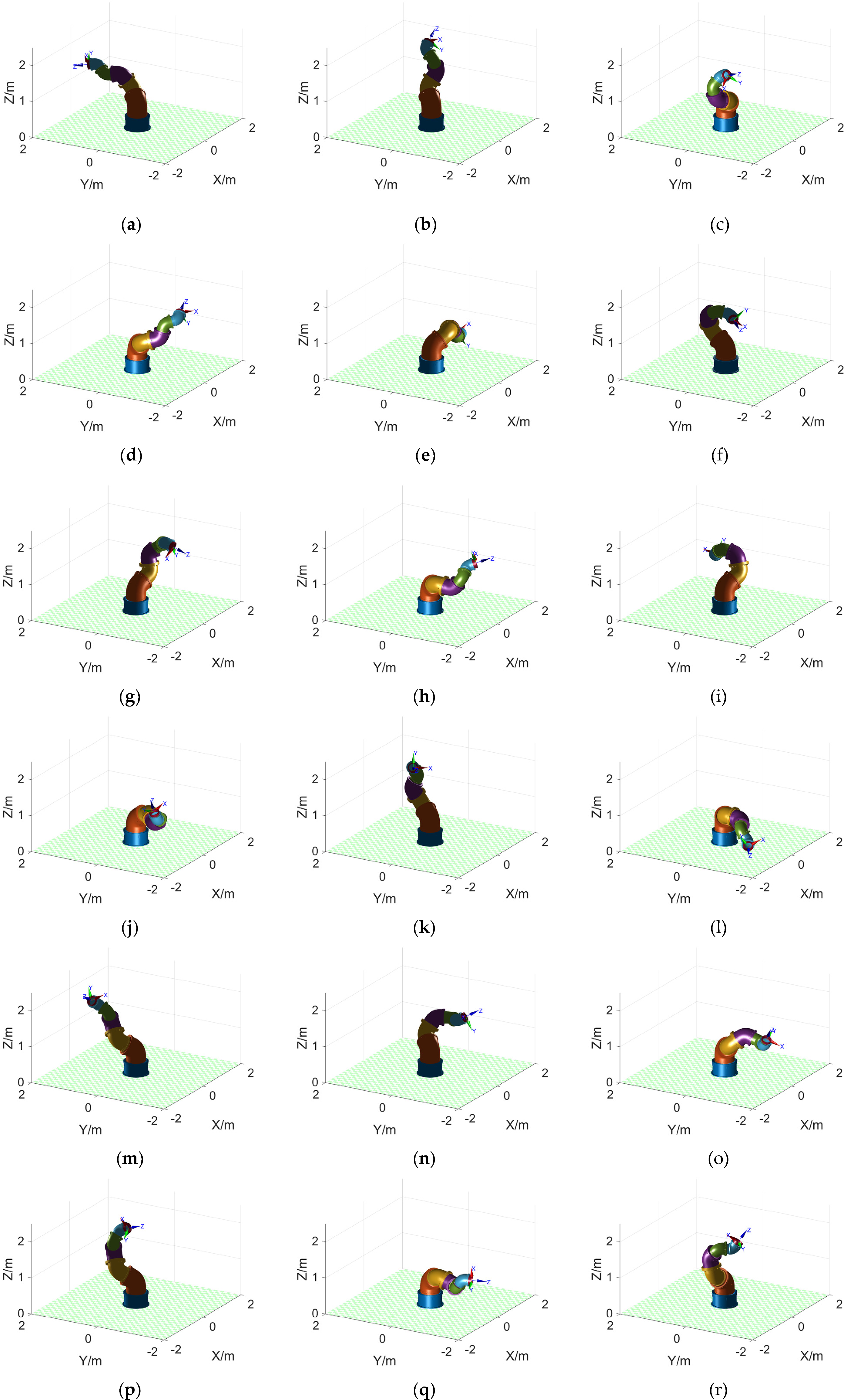
Simulation model of manipulator at test point.
Test point for verification of kinematic model (°).

The positive kinematic solution of manipulator is calculated at test points 1–18. Refer to Table 3 for the pose of corresponding end effector of joint angle.
Pose of corresponding end effector of joint angle.

At the above 18 poses, Newton's iterative method is utilized to solve their inverse kinematics solution, and the joint angle obtained is consistent with that in Table 2. Simulation results have verified the correctness of reverse solution of manipulator.
Experimental verification
To evaluate the motion performance of manipulator, six groups of predefined test points (the first six test points as mentioned in “Simulation analysis” section are adopted in this research for comprehensive experimental verification. The joint angle data are collected in real time via high-precision rotary encoder installed via axial system of each joint, and the actual end effector pose is compared with theoretical prediction results of forward kinematic model. Figure 5 shows the manipulator pose at different test points. Subgraphs (a)–(f) are corresponding to the pose state of test point 1–6 as defined in “Simulation analysis” section, respectively. Quantitative analysis indicates that root mean square error of translation between actual pose and theoretical value is 0.15 mm (maximum value is 0.23 mm, and the attitude angle error is 0.18°, verifying the effectiveness of kinematic model proposed.
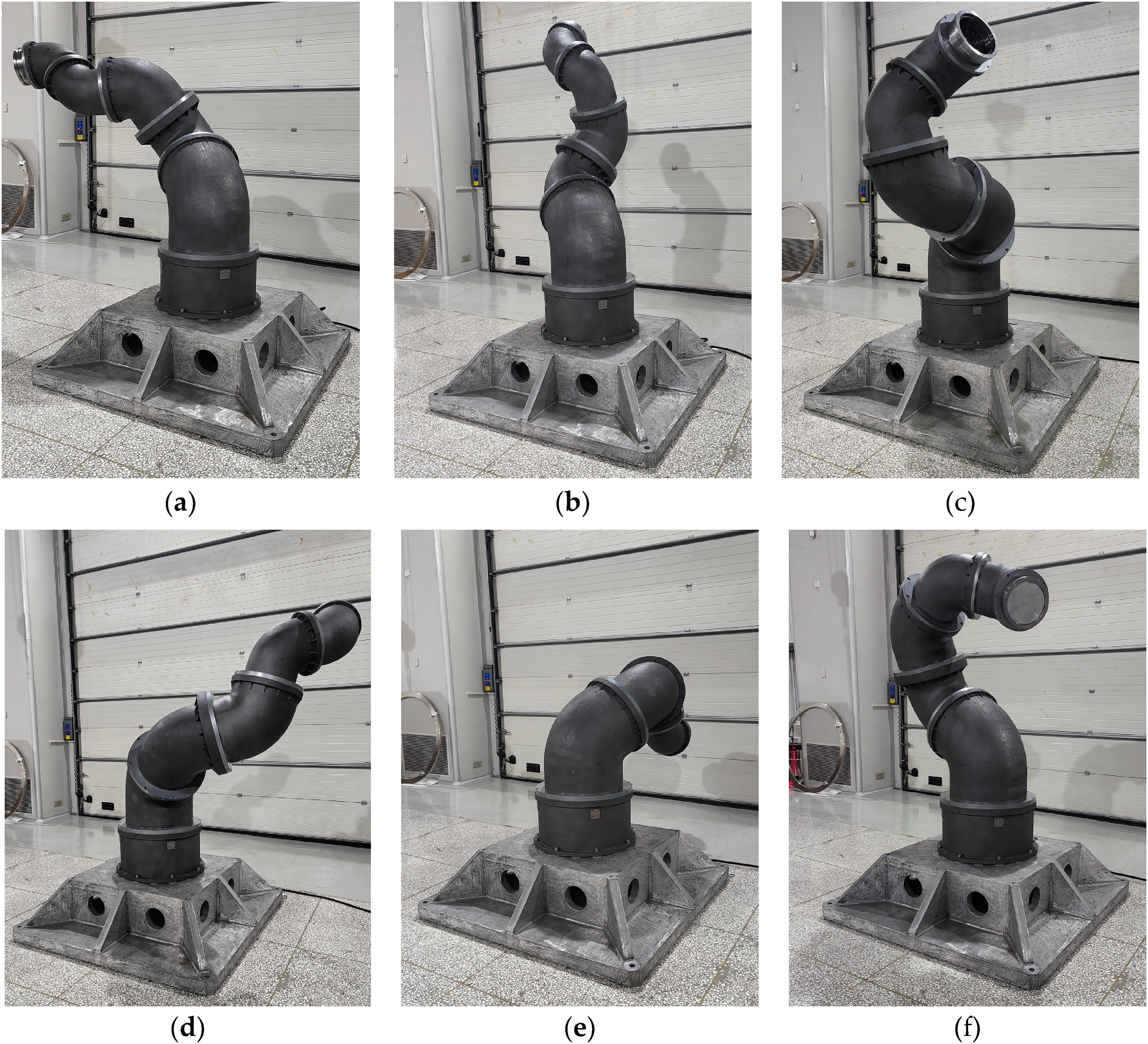
Manipulator pose at different test points.
Singularity analysis
Kinematic simulation of manipulator singularity is the key link for connection of theoretical design and practical application. When manipulator is at singularity pose, manipulator will exhibit special kinematic and dynamic characteristics and usually leads to the control difficulty, performance reduction even potential safety hazards.33–36 Therefore, the avoidance of manipulator singularity pose is of great significance in safe and reliable operation of manipulator. It not only can avoid the risk of losing control and optimize performance but also can provide data support for algorithm development control and mechanical structure improvement, finally improving the reliability and safety of manipulator in complex task. For the application scene (such as alignment of optical components) with high precision and high dynamic requirements, such simulation is indispensable verification link.
Analysis and calculation of kinematic singularity
The singularity of 6 × 6 Jacobian matrix actually needs be analyzed upon kinematic singularity analysis of the manipulator. Singular matrix J is rank-deficient matrix, and its determinant's value is 0, namely
where det() indicates the determinant of matrix.
Therefore, the value of matrix determinant is calculated and then the condition that such value is equal to 0 is found to obtain the rank-deficient condition of matrix.
Determinant value could be calculated via Laplace. 37 Any row i or column j could be selected for calculation:
The calculation is carried out as per the ith row
wherein
The calculation is carried out as per the jth column
After analysis and calculation, four conditions making J deficient in rank, as shown in Table 4.
Rank-deficient condition of J.

These four joint angle combinations would make manipulator lose partial degrees of freedom or control ability, so they shall be avoided in trajectory planning.
Singularity visualization
It is necessary to further analyze the distribution rule of those singular conditions and their impact on manipulator motion so that they can be better understood and avoided in actual application. The kinematic model of manipulator is established to calculate the conditional number or operability index of Jacobian matrix, thus quantizing singularity and identifying singular interval. Besides, the dynamic change of singularity distribution of manipulator in different postures could be observed more intuitively in combination with simulation analysis, rendering reliable basis for trajectory planning.
The simulation analysis is performed to the manipulator singularity with same posture in different positions to visualize the singularity distribution. The example of singular joint angle is shown in Table 5, and the corresponding singularity pose is shown in Table 6. Figure 6 shows the singularity distribution with unchanged posture and location change. Axes X, Y, and Z indicate the positions of manipulator end effector in the direction (unit: mm) of X, Y, and Z, respectively. Different colors in cube in the figure represent the manipulator's Jacobian matrix determinant value at the corresponding coordinates. The color of different position is observed to judge whether manipulator approaches the singular point at certain specific location and how is the motion flexibility at the location. In the blue area of the figure, Jacobian matrix determinant value is closer to 0, and the manipulator is more likely to be in singular state.
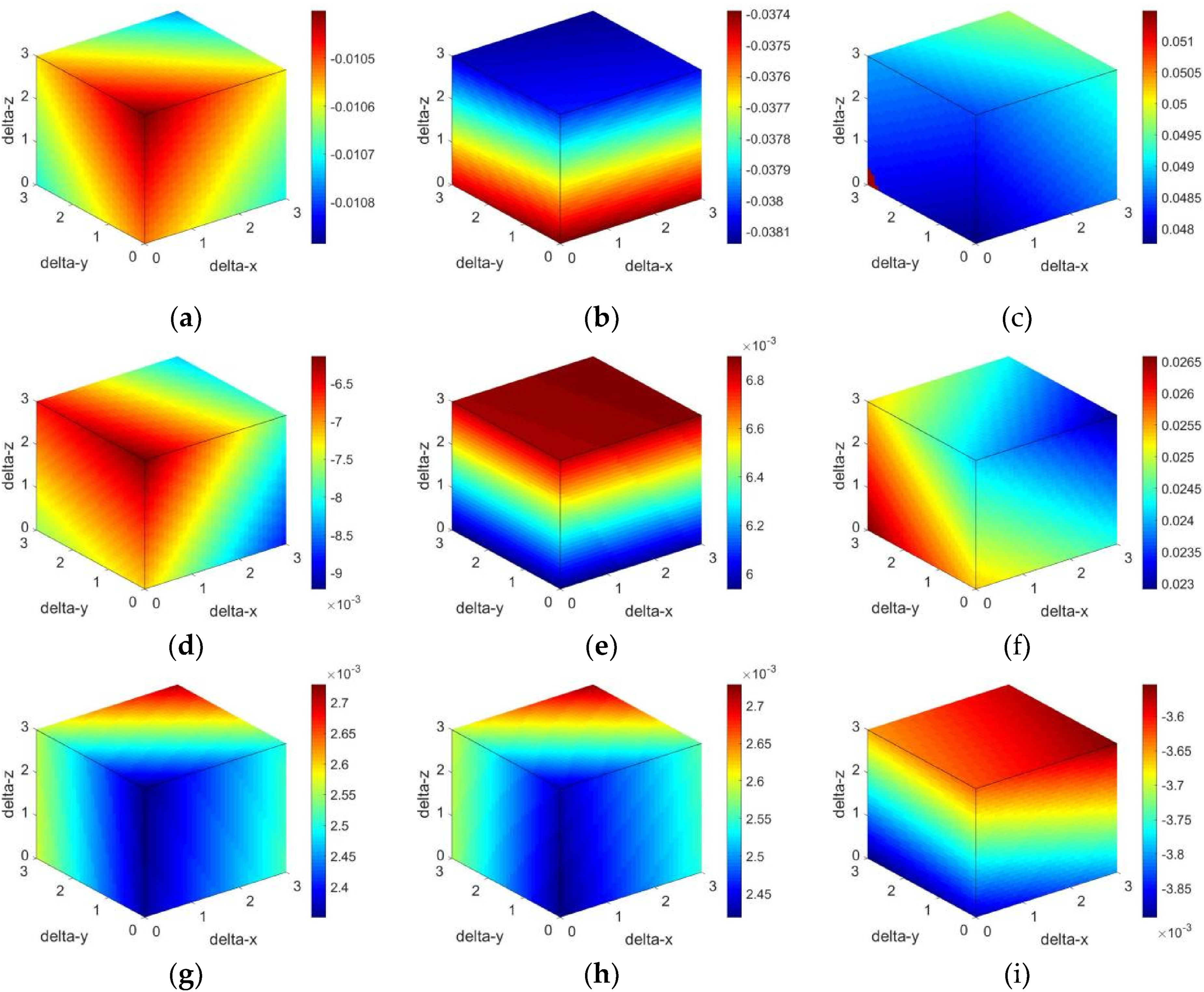
Distribution diagram of manipulator singularity with same posture in different positions.
Example of singular joint angle of manipulator (°).

Example of singularity pose of manipulator.

Figure 7 shows the singularity distribution with unchanged location and changed posture. The axes X, Y, and Z indicate the end effector's attitude angle
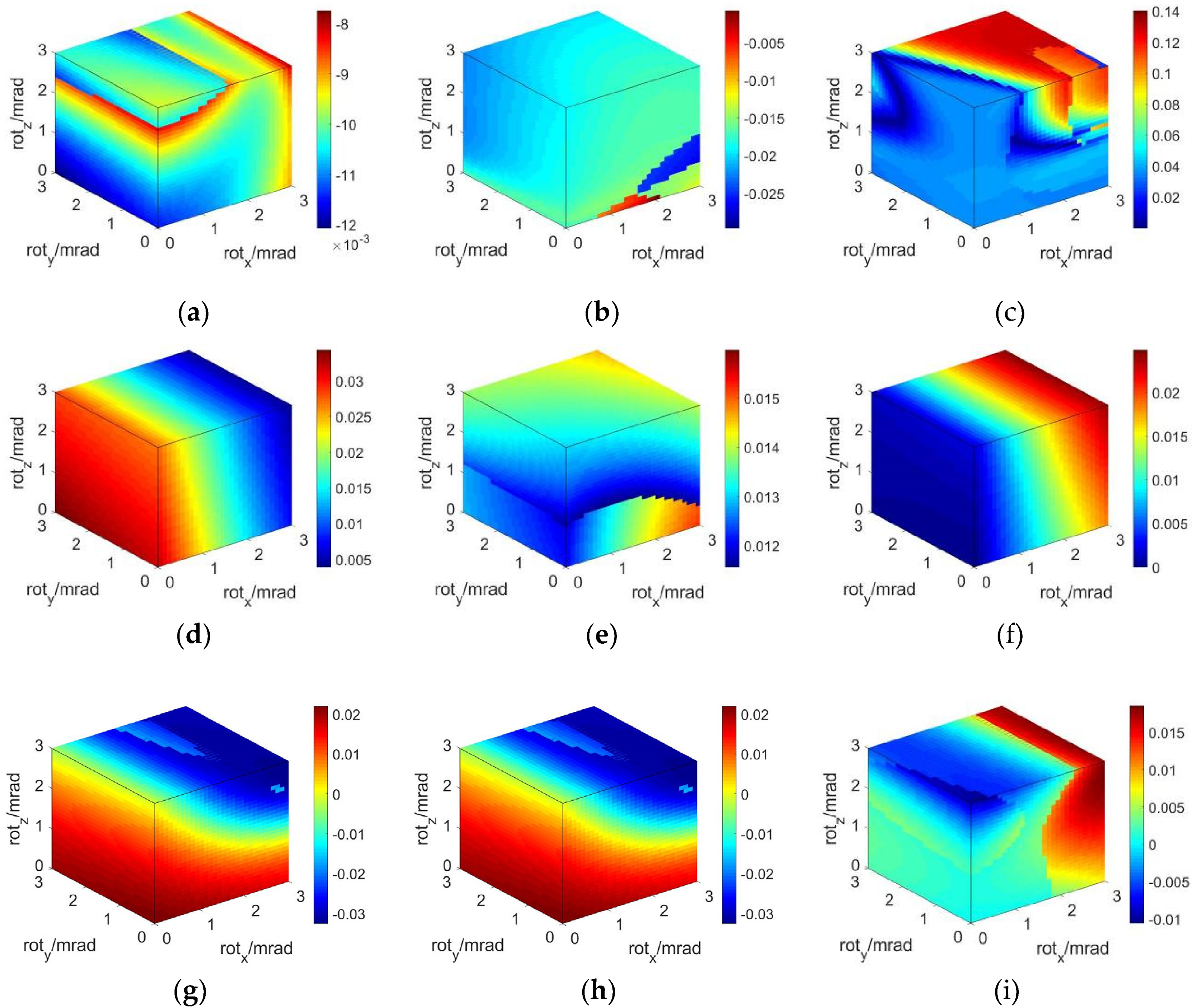
Distribution diagram of manipulator singularity at same position in different positions.
Three-dimensional spatial distribution diagram intuitively reflects the motion flexibility differences at different locations/postures. Position coordinates and attitude angle characteristics of singular configuration at Cartesian space are quantitatively demonstrated in combination with specific pose parameter table, rendering the obstacle avoidance basis for actual trajectory planning.
Singularity avoidance strategy based on ADLS
Singularity avoidance strategy based on ADLS is expounded in this section.
The damped least-squares is adopted in literature9–11 for singularity avoidance, namely
wherein
To address the above problems, the damped least-squares is adopted in literature.
12
First, the singular value of Jacobian matrix is decomposed, namely
wherein U refers to the
The weighted damped least-squares can be written as
wherein, for the
The Modified ADLS is adopted in this thesis to improve the singularity avoidance strategy. When manipulator stays away from singularity pose, its Jacobian matrix's inverse solution can be calculated, and Newton's iterative formula (14) can be adopted to solve its inverse kinematics solution. When manipulator approaches the singularity pose, its Jacobian matrix's inverse solution can't be calculated. At this time, the damping factor λ can be introduced to Newton's method to weigh the norm of joint factors to improve robustness, namely
It can be seen that the numerical value of λ determines the damping effect. In this thesis, λ is 0.1. In different algebras of iteration, the magnitude of damping affects the speed of convergence. Therefore, dynamic adjustment can be performed to the damping factor λ based on the SVD decomposition of Jacobian matrix, namely

wherein
We analyze the impact patterns of different parameter combinations on system convergence speed, terminal trajectory tracking error, and joint velocity smoothness. The results indicate that the adaptive threshold C primarily affects the timing of damping mechanism intervention. A smaller threshold allows the system to enter the damping adjustment phase earlier, thereby enhancing stability near the singularity interval but potentially reducing convergence speed. Conversely, a larger threshold is beneficial for maintaining rapid convergence performance but may weaken the suppression capability against singularity disturbances. The benchmark damping value primarily affects the smoothness and numerical stability of joint velocity. A larger benchmark damping helps to suppress peak values in joint velocity but may introduce some loss in tracking accuracy. Conversely, a smaller damping value can improve tracking accuracy but is more prone to generating velocity jumps when approaching singular configurations.
The basic principles of parameter selection emphasize the need to balance system convergence speed and tracking accuracy while ensuring numerical stability and velocity smoothness.
The algorithm flowchart is shown in Figure 8.
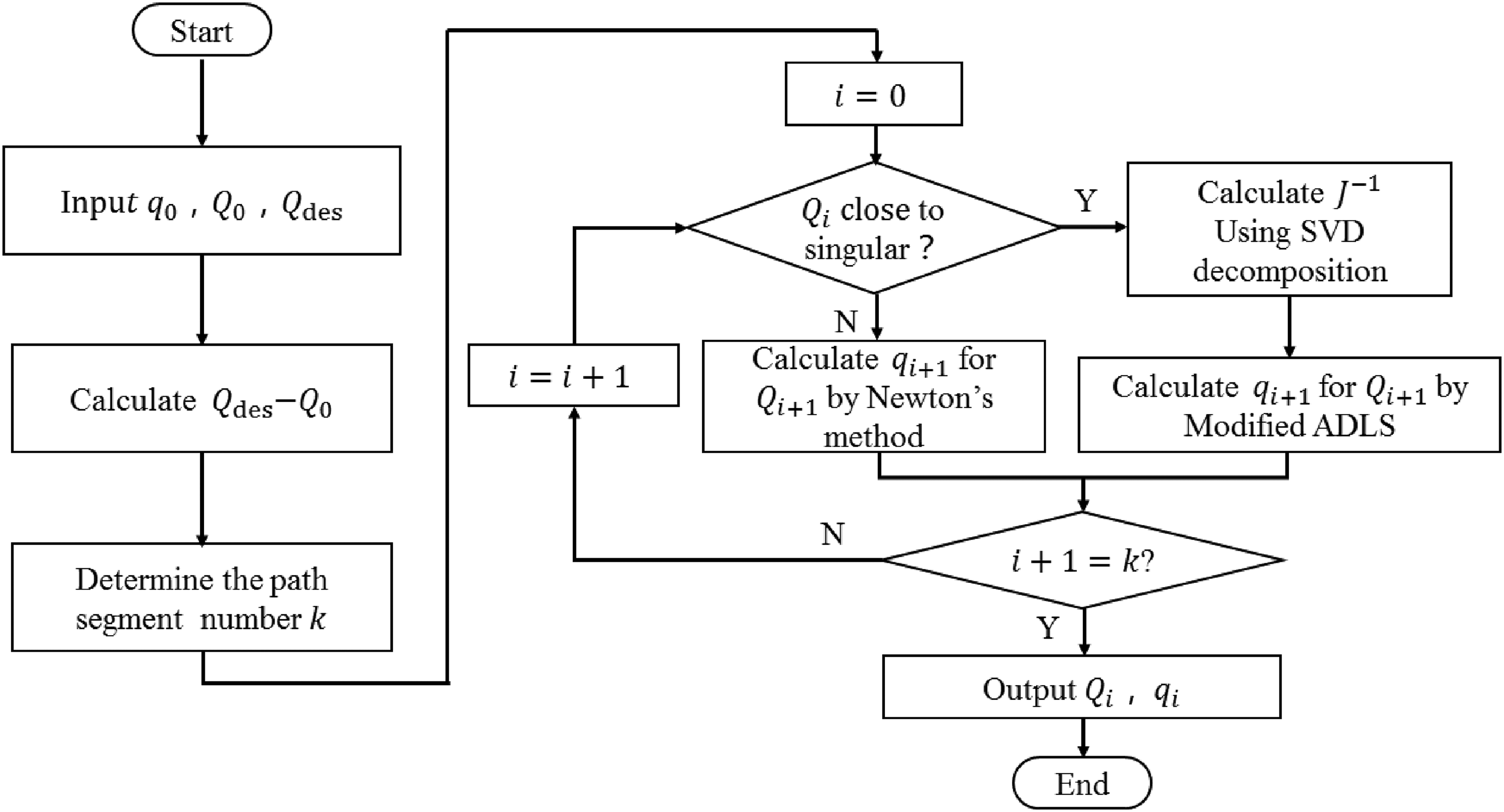
Singularity avoidance algorithm process of manipulator.
The method in this thesis shows the following core innovations:
Adjustment of dynamic damping: Based on SVD of Jacobian matrix, minimum singular value σ_min is calculated in real time, Optimization of threshold criteria: The threshold value c = 1 × 10−6 (formula 25) is set. When σ_min≥c, damping is constant (λ = 0.1) to guarantee the solution accuracy in nonsingular interval; When σ_min < c, damping has dynamic adjustment to improve the robustness in near-singular interval. Integrated design of algorithm: In combination with the Newton's iterative method (nonsingular interval) and damped least-squares (near-singular interval), smooth switching is achieved via the process in Figure 8, and the computational efficiency and stability are taken into account.
Compared with traditional fixed damping method (literature9–11) or weighted DLS (literature 12 ), the method in this thesis effectively balances tracking accuracy and singularity avoidance capability via adaptive mechanism, rendering new thought for high-precision and highly robust motion control of redundant manipulator.
Simulation and experiment of singularity avoidance
To verify the singularity avoidance performance of ADLS, this manipulator is taken as an example, and the singularity pose 1 as mentioned in “Singularity visualization” section is adopted for simulation analysis and experimental verification. Simulation analysis verification is performed in this research.
Simulation analysis
To address that Jacobian matrix can't undergo iteration due to singularity or ill-conditioning, the near-singularity pose substitutes the singularity pose 1. Terminal pose and initial pose are symmetric in singularity pose, namely
wherein 1 indicates the singularity pose. 
The basic parameters upon simulation analysis are shown in Tables 7 and 8. The running path of manipulator contains the pose close to singularity.
Joint angle (°) for simulation analysis of singularity avoidance.

Singularity avoidance simulation analysis pose.

The path from initial pose to terminal pose is divided into 50 sections, including 25 sections from the initial pose to singularity pose, and 25 sections from near-singularity pose to terminal pose.
Newton's algorithm is adopted to obtain the singular value σ curve of Jacobian matrix and the angular velocity curve of all joints upon running of manipulator, as shown in Figures 9 and 10. The figure shows that the Jacobian matrix determinant falls below 105 at about 33 s–35 s, the joint angular velocity exhibits a discontinuity at approximately 30 s, the singularity occurs in simulation process, and the singular interval is judged to be between 29 s and 40 s.
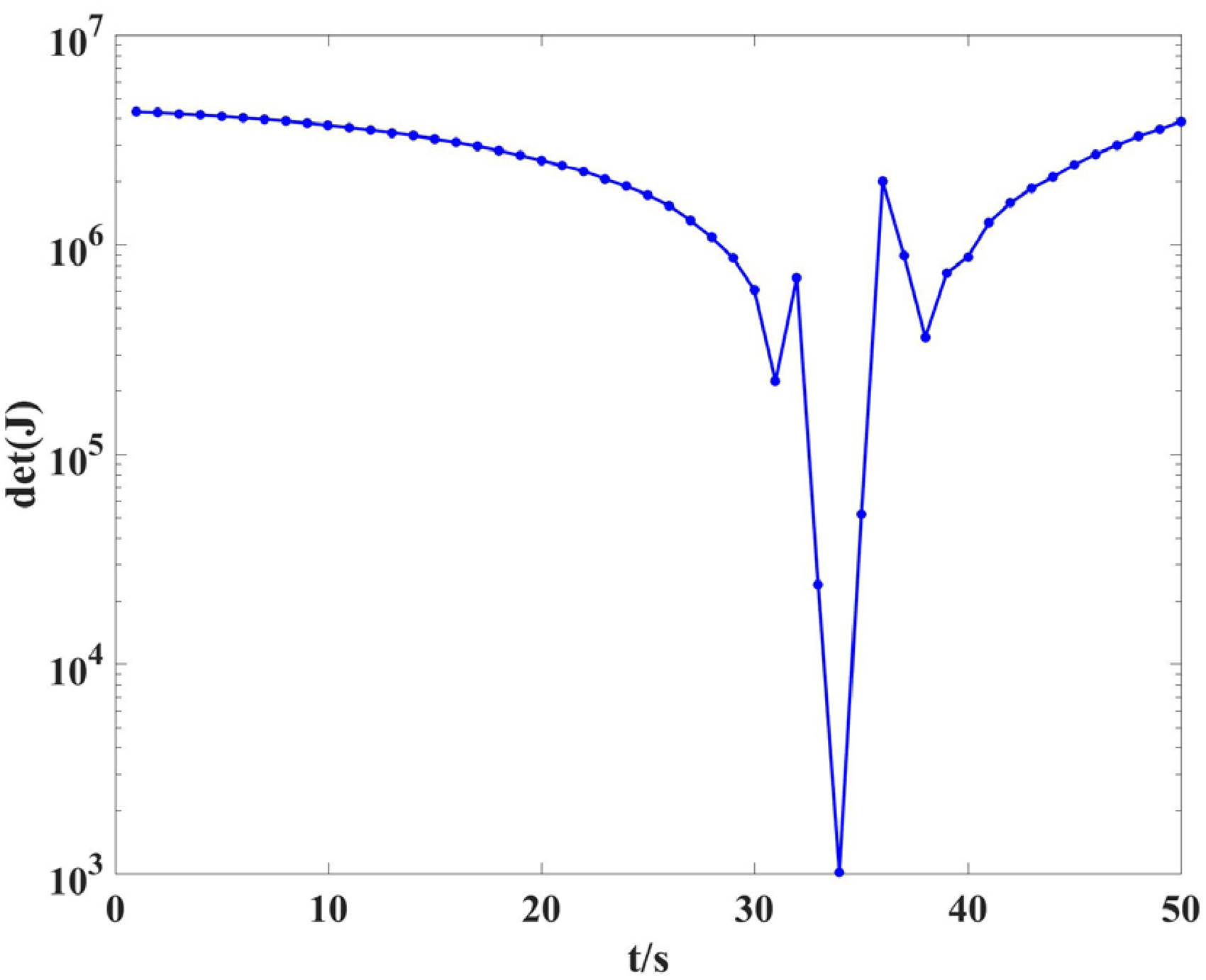
Simulation results of Jacobian matrix determinant curve when Newton's algorithm is adopted.

Simulation results of angular velocity of all joints of manipulator when Newton's algorithm is adopted.
Adaptive damped least-squares algorithm is adopted to obtain the modified damping factor λ curve and the angular velocity curve of all joints of manipulator, as shown in Figures 11 and 12. Figure 11 shows that during 0–29s and 40 s–50 s, since σ > c = 0.06, λ is always 0. During 30 s–39 s, since singular value σ ≤ c = 0.06, λ enters the dynamic adjustment interval. Figure 12 shows that in singular interval, the angular velocity of joints 1–6 isn't impacted, the joints 1–4 exhibit minor oscillations between 29 s and 42 s, but the amplitude value is still controlled obviously, avoiding the occurrence of singularity.

Simulation results of λ upon improvement of the adaptive damped least-squares.

Simulation results of angular velocity of all joints of manipulator upon improvement of adaptive damped least-squares.
To verify the advantages of ADLS over standard DLS, we conducted two comparative experiments: one was the path smoothness of the manipulator when passing through singular points, and the other was the position error of the manipulator when reaching the destination. Figure 13 compares the offset of the avoidance path between DLS and ADLS relative to the target path. In this figure, the horizontal axis represents time, and the vertical axis represents the deviation of the actual trajectory from the planned trajectory. It can be seen from the figure that compared with the standard DLS, ADLS can better fit the original path and has better trajectory smoothness.

The offset of the avoidance path between DLS and ADLS relative to the target path.
Table 9 compares the positioning errors of the manipulator when using ADLS and standard DLS, respectively. The results indicate that, compared to standard DLS, ADLS achieves singularity prediction and more precise positioning of the end-effector, with higher numerical stability.
Comparison of positioning error between ADLS and standard DLS.

This article mainly verifies the singularity prediction and avoidance capabilities of the proposed method at the kinematic level. The proposed adaptive damping mechanism can mitigate sudden speed changes during operation to some extent. By adjusting the damping parameters in real time, the system increases damping when approaching a singularity, thereby suppressing rapid speed variations, improving the smoothness and controllability of motion, and helping to maintain stability and repeatability.
External disturbances, such as mechanical vibrations or environmental interference, may cause lag in the adjustment of damping parameters, introducing cumulative errors or drifts. Load variations, especially heavy-load operations, can change the dynamic characteristics of the manipulator, posing challenges to model-based adaptive strategies and potentially reducing control accuracy or stability.
Experimental verification
To further evaluate the performance of singularity avoidance algorithm of manipulator, the manipulator is adopted in this research for comprehensive. Joint angle data are collected in real time via high-precision rotary encoder installed in each joint axis system, and the actually measured data of angular velocity of all joints and the theoretical prediction results are compared. Figure 14 exhibits the initial pose and terminal pose of manipulator, in which (a) is initial pose and (b) is terminal pose. Figure 15 exhibits the angular velocity of all joints of manipulator upon singularity avoidance, respectively. High-precision encoder data indicate that: The error between the actual measured angular velocity of the joint and the simulated angular velocity is less than 0.21°/s. The algorithm robustness is verified.
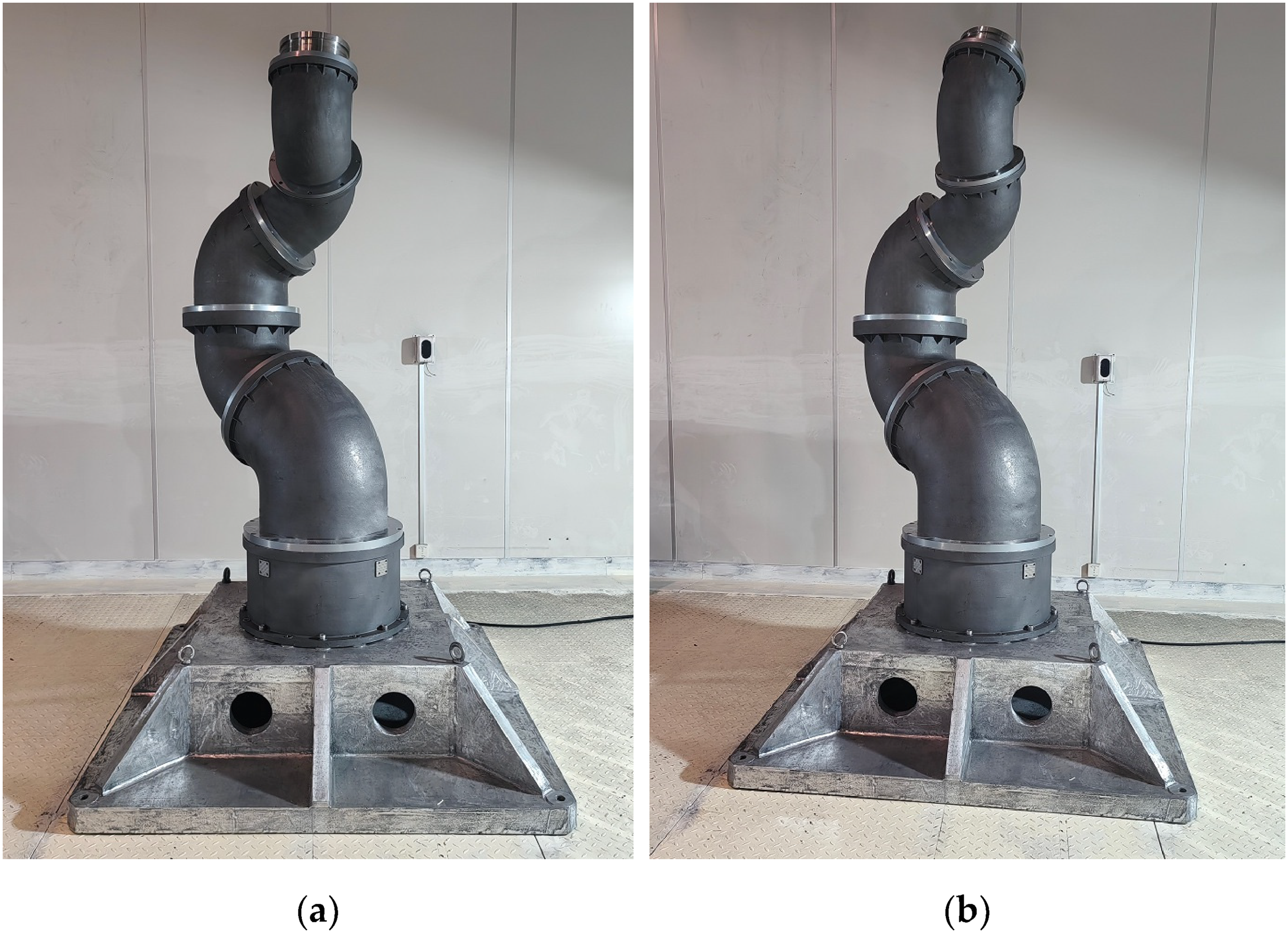
Verification test of manipulator singularity.

Actual measurement results of angular velocity of all joints of manipulator.
The proposed singularity prediction method is located at the inverse kinematics and trajectory tracking layer, rather than directly involving upper-level planning or lower-level drive control. This method can be seamlessly embedded into existing robot control frameworks, achieving decoupling from upper-level path planning tools and lower-level drive control systems. This design approach facilitates deployment in existing systems without requiring significant modifications to the overall control architecture, thereby reducing engineering implementation costs and risks.
Conclusion
A kind of rotary wedge–type manipulator suitable for the alignment tasks of high-precision optical components is proposed in this thesis, the systematic research centers on its kinematic modeling and singularity processing, with main conclusions as below:
Positive kinematic solution model of the manipulator is established, and a kind of ADLS is proposed to address its inverse kinematics problem. Exact solution in all dimensions could be provided when feasible motion is met. When the manipulator is close to singular configuration, the algorithm allows users to effectively balance tracking accuracy and singularity avoidance capability via adaptive mechanism, thus achieving the effective control of task accuracy. The simulation analysis and experimental verification on the six-joint industrial manipulator verifies that the method proposed can effectively and accurately predict and avoid the potential singularity interval of manipulator in motion process, with good real-time performance and engineering application prospects.
Due to experimental conditions and research period constraints, this article fails to systematically cover multiple singular points or highly complex three-dimensional trajectory conditions. It should be noted that the core purpose of the experimental design in this article is not to exhaustively verify all industrial application scenarios, but rather to focus on verifying the feasibility and effectiveness of the proposed method in predicting and identifying singular intervals in advance. Therefore, the experimental trajectory was intentionally designed to encompass typical singularity intervals, aiming to highlight the response characteristics of the prediction mechanism when approaching singular configurations. Through simulation and experimental verification of a six-degree-of-freedom industrial manipulator, the method presented in this article demonstrates good consistency in singularity prediction progress and adaptive damping adjustment, preliminarily proving its feasibility and application potential in practical engineering systems. Further expansion to systematic verification in multisingularity environments and under complex three-dimensional trajectories will be one of the important directions for future work, in order to comprehensively evaluate the robustness and engineering applicability of this method under complex working conditions.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Data Availability Statement
The data that support the findings of this study are available within the article. No further raw data are available.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.