This paper presents the construction of the two-point and three-point block methods with additional derivatives for directly solving . The proposed block methods are formulated using Hermite Interpolating Polynomial and approximate the solution of the problem at two or three-point concurrently. The block methods obtain the numerical solutions directly without reducing the equation into the first order system of initial value problems (IVPs). The order and zero-stability of the proposed methods are also investigated. Numerical results are presented and comparisons with other existing block methods are made. The performance shows that the proposed methods are very efficient in solving the general third order IVPs.
Olabode1 used block multistep method to solve special third order initial value problems (IVPs) of ordinary differential equations (ODEs). This new block method has desirable property of Runge-Kutta method, which is self-starting. Majid et al.2 derived a two-point implicit block direct integration method to solve third order IVPs. This method estimates the solutions of the IVPs at two points concurrently.
Mehrkanoon3 used the Gauss Seidel approach to implement three-point implicit block multistep method for directly solving the third order IVPs. Majid et al.4 applied the simple form of Adam’s Moulton method to present two-point 4-step implicit block method for solving the general third order ODEs directly. In the same vein, Bolaji et al.5 developed a 1-step implicit block method using collocation technique to find the approximations of third order ODEs where three sub-step methods were considered. Jator et al.6 constructed a new class of implicit continuous linear multistep methods (LMMs) which were used to solve general third order initial and boundary value problems. Jikantoro et al.7 developed hybrid method for direct integration of special third order ODEs.
Omar et al.8 solved the third order ODEs directly by developing a new predictor-corrector block method of order seven. Abdullahi et al.9 derived predictor-corrector block method of order six to solve third order ODEs directly by using collocation and interpolation approach on power series. In the previously mentioned work, all of them did not use the additional derivative in the formulation of the methods. Most of the methods were also derived using interpolation and collocation technique, the points need to be collocated and interpolated after which a system of linear equations need to be solved simultaneously to obtain the coefficient of the block methods. Hence the process requires more computational effort compared to integration method used in this paper, whereby the function is replaced by the interpolating polynomial and integrating the polynomial at the specific points. This technique is simpler and straight forward.
In this paper, we focus on the derivation of two-point and three-point block methods for solving general third order IVPs, which approximate the solution to the IVP at two or three-point simultaneously. The block methods obtain the numerical solutions directly without reducing the IVP into a system of first order IVPs three times the dimension. In most of the previous work, the methods do not have the extra derivative of the functions. In the new proposed methods, the higher derivative of the function is incorporated into the methods. The purpose of introducing the additional derivative into the formula is to enhance the efficiency in terms of accuracy and computational time. Numerical experiments are carried out to show the superiority of these new methods compared to the existing methods. It is expected that the new methods will outperformed the existing methods in terms precision and they will require less CPU time to do all the computation. The order and zero-stability of the methods are also presented, which clearly show that the methods are convergence.
General third order IVP can be written as:
The methods are two-point and three-point block methods. The second derivative of fwith respect to t can be written as
The derivation of the new methods are based on Hermite Interpolating Polynomial P, which can be defined by:
where and , n is a positive integer. can be defined by
And recursively for
Derivation of the new methods
In this section, we present the construction of two-point and three-point implicit block methods with additional derivatives.
Two-point additional derivative block method
In two-point block method, each block in the interval [a,b] contains two points. The values of and at the first point can be obtained by integrating (1) once, twice and thrice over the interval which gives
and
Let and substituting into (3), (4) and (5), we have
Replace, in (6), (7) and (8) by Hermite interpolating polynomial in (2), which is defined as , where
Let t and
Substitute and change the integration limits from −2 to −1 in (6), (7) and (8) to obtain
where
Evaluating the integrals in (11), (12) and (13), results in the formula at the first point as follows,
Integrating (1) once, twice and thrice over the to acquire the approximate solutions of , and taking
Then, replace in (17), (18) and (19) by Hermite interpolating polynomial in (9). Letting and replacing the lower limit of the integration by −1 and the upper limit by 0, gives
Evaluating the integrals to obtain the formula at the second point as follows,
The set of formulae in equations (14), (15), (16), (39), (24) and (25) is denoted as 2PSDIBM(3) method.
Three-point additional derivative block method
In the three-point implicit block method, each block in the interval [a,b] contains three points. The values of , and at the point , and are concurrently evaluated in a block.
The derivation of the three-point block method is similar to the previous construction of the two-point block method. Equation (1) will be integrated once, twice and thrice on the interval , and to obtain the values of and . Define as follows,
Replace by polynomial in (26), let t hence, The formula for the first, second and third point can be written as follows:
This method is denoted as the 3PSDBI(3) method.
Order conditions and error constant of the methods
The local truncation error associated with the normalized form of the proposed method can be defined as the linear difference operator
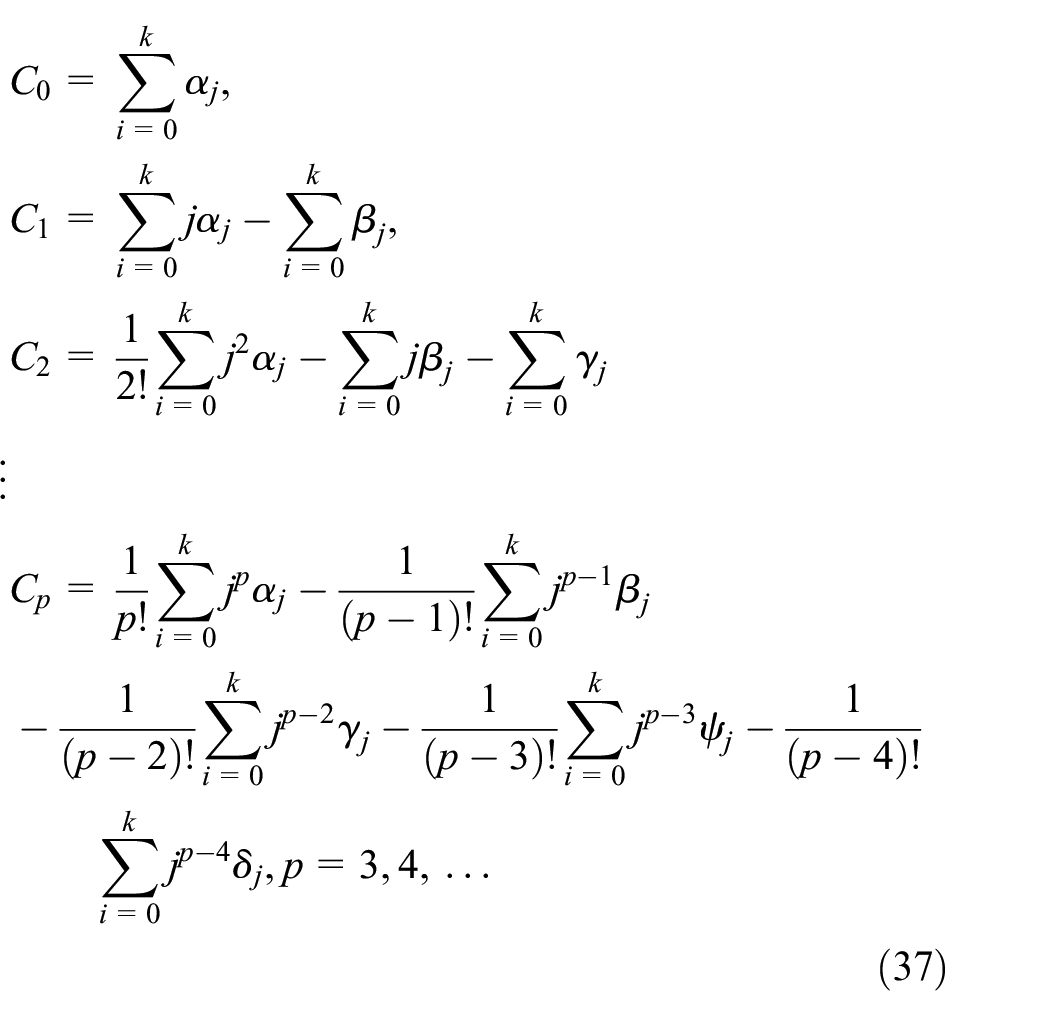
where d is the order of the differential equation and is an arbitrary function, which satisfied the conditions for continuity and differentiability, see Fatunla10 and Lambert11 for further details. Using Taylor series at point t to expand and in (36) gives
the constant coefficients are given as follows:
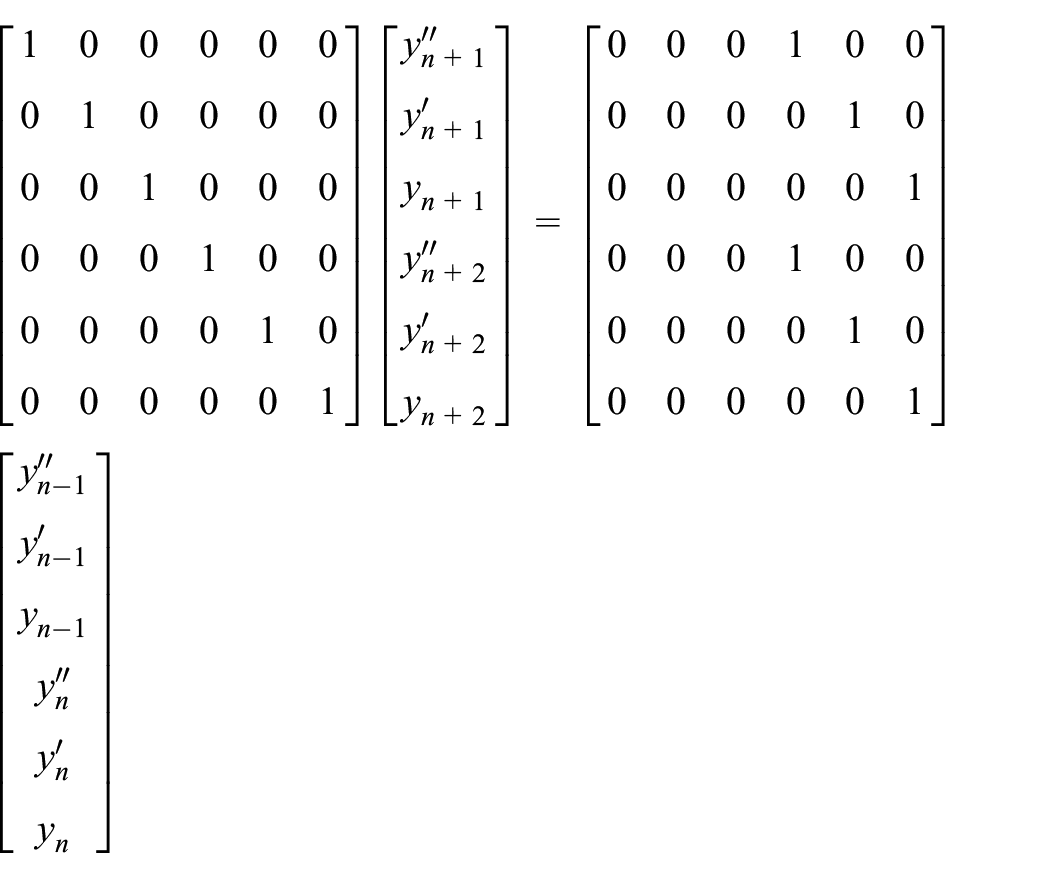
The proposed method has order p if Therefore, is the error constant and is the principal local truncation error at the point . The two-point block method given by (14), (15), (16), (23), (24) and (25) can be written in a matrix as follows:
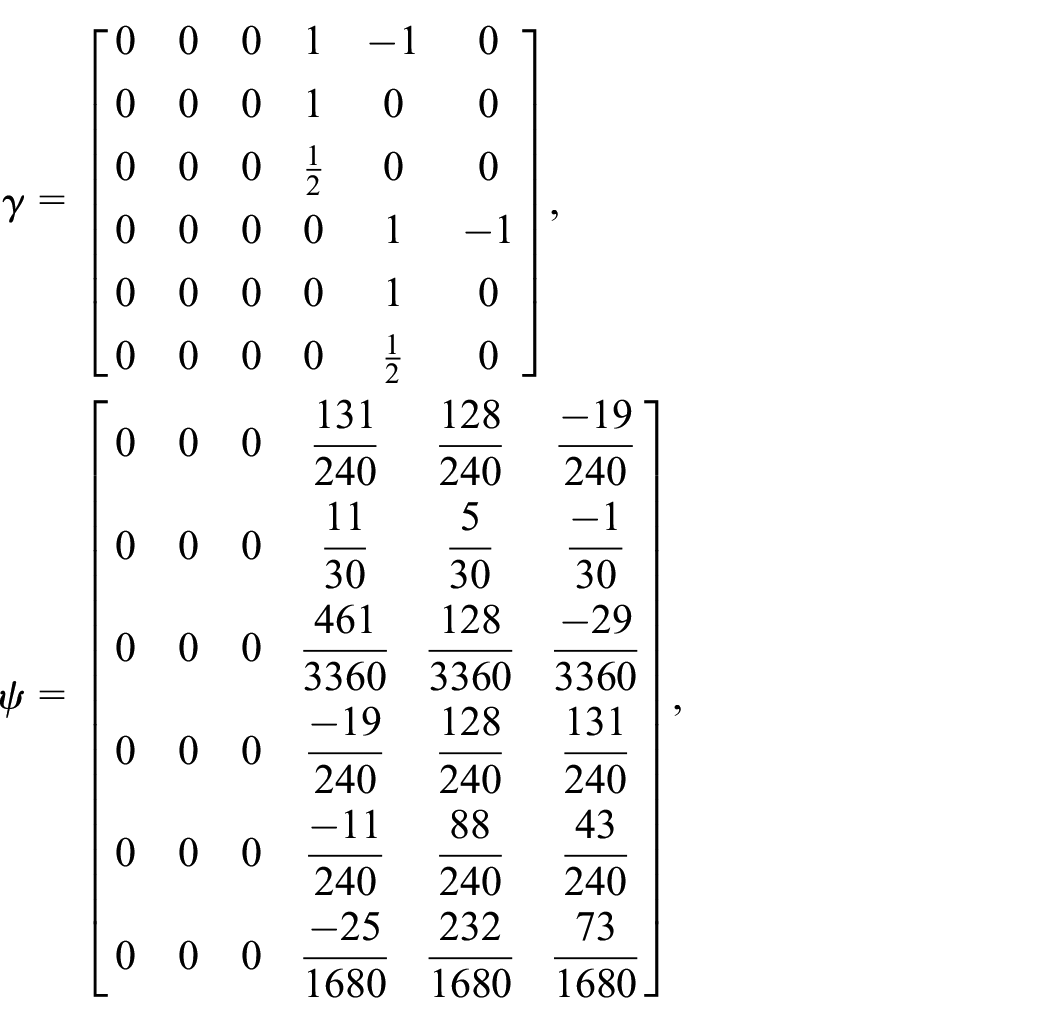
where , and are the coefficients with the m-vector and be defind as,
By substituting these matrices into equation (37) we have
where is the zero vector which can be written as
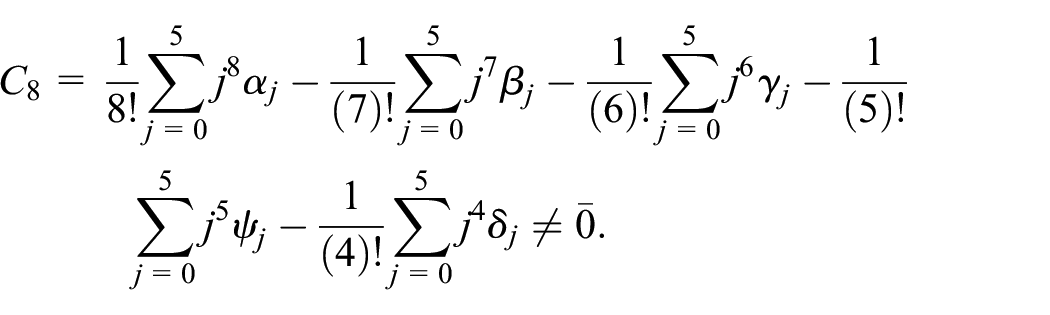
For it is found that where
Then, the order of the two-point block method is with error constant,
The formulae of the three-point implicit block method given by equations (27) to (35) can be written as in (38) with and depend on the coefficients of the method. While
Then, the order of the three-point block method is with error constant Hence, the method is said to be consistent since the order is higher than three.
Zero-stability of the methods
In this section, zero-stability of the proposed methods is discussed. For the two-point block method, substituting equation (14) into (23), gives
Write the formulae in (27), (28), (29), (42), (43), (44), (45), (46), and (47) in matrix form and the zero-stability of the method can be obtained from
Let the matrix coefficient on the left and is the matrix coefficient on the right of the above equation.
Zero-stability polynomial of the method is det ,
The three-point block method is zero-stable since and multiplicity of the roots is at most 3.
The zero stability and consistency (the order of the methods is greater than three) of the two-point and three-point methods implied that the methods are convergence, according to Ackleh et al.12
Numerical Experiments
Based on the proposed methods, codes in C-programming are constructed for solving general third order IVPs, comparisons of the results are done with other existing methods. The comparisons are made with block methods of almost the same order or the same point number. The values of in the two-point method and and in the three-point method are approximated using the predictor-corrector equations. Where Taylor method is used as the predictor equation, this is the common practice in the implementation of other implicit block methods in the literature, see Majid et al.13 for further details. We are also using Taylor method for the predictor equations in the implementation of the methods of comparison, hence, it is a very fair comparison. The predictor equations using Taylor method can be written as:
Where for the two-point method and for the three-point method.
Test problems:
Problem 1
Exact Solution:
Problem 2
Exact Solution:
Problem 3
Exact Solution:
Problem 4
Exact Solution:
Problem 5
Exact Solution:
Problem 6
Exact Solution:
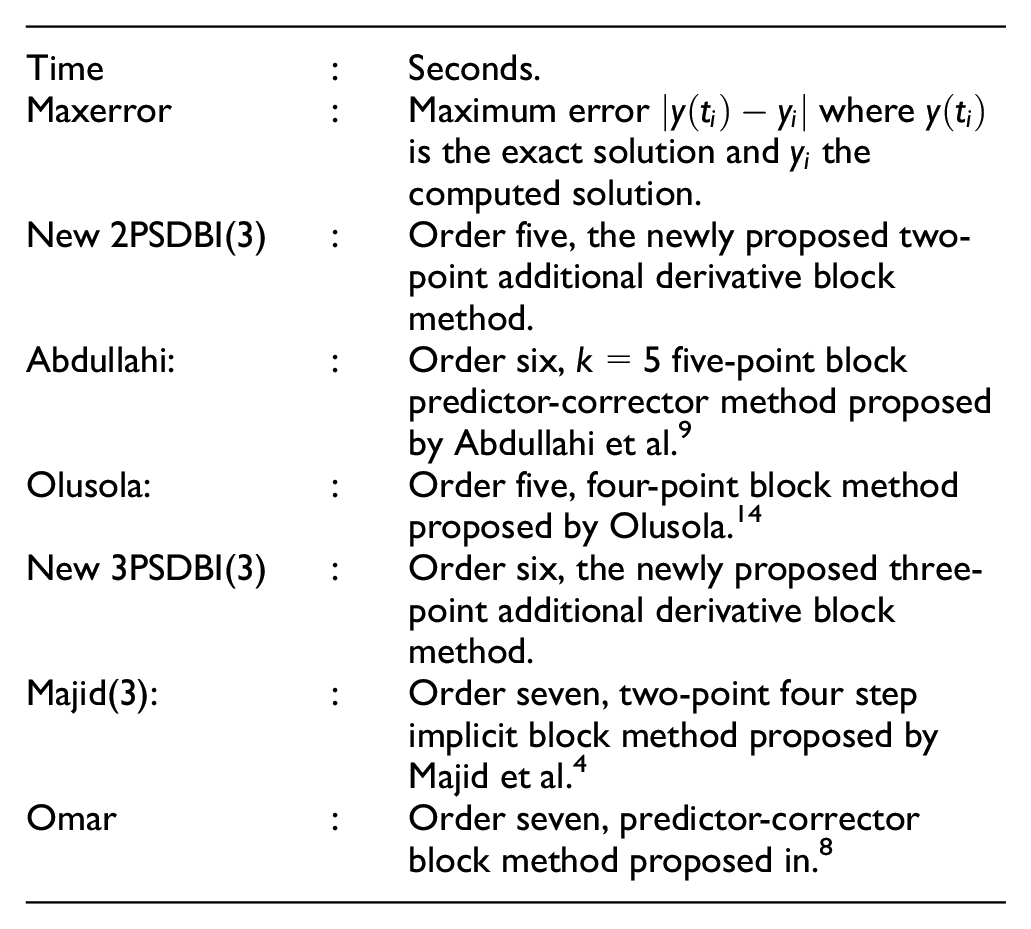
Notations used:
Time
:
Seconds.
Maxerror
:
Maximum error where is the exact solution and the computed solution.
New 2PSDBI(3)
:
Order five, the newly proposed two-point additional derivative block method.
Abdullahi:
:
Order six, five-point block predictor-corrector method proposed by Abdullahi et al.9
Olusola:
:
Order five, four-point block method proposed by Olusola.14
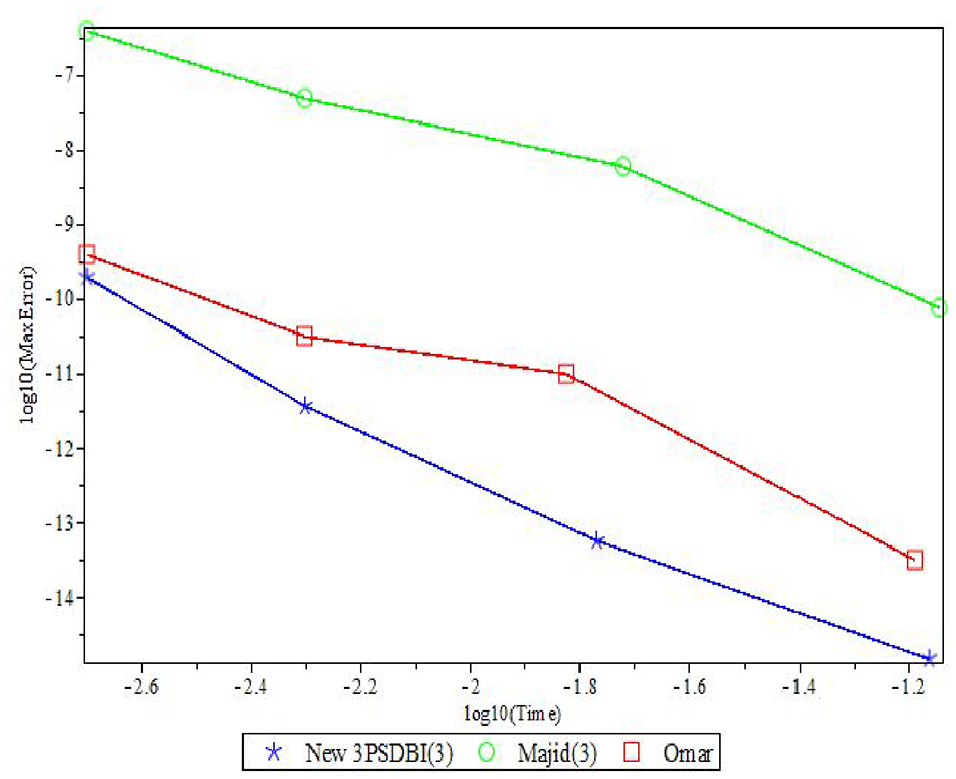
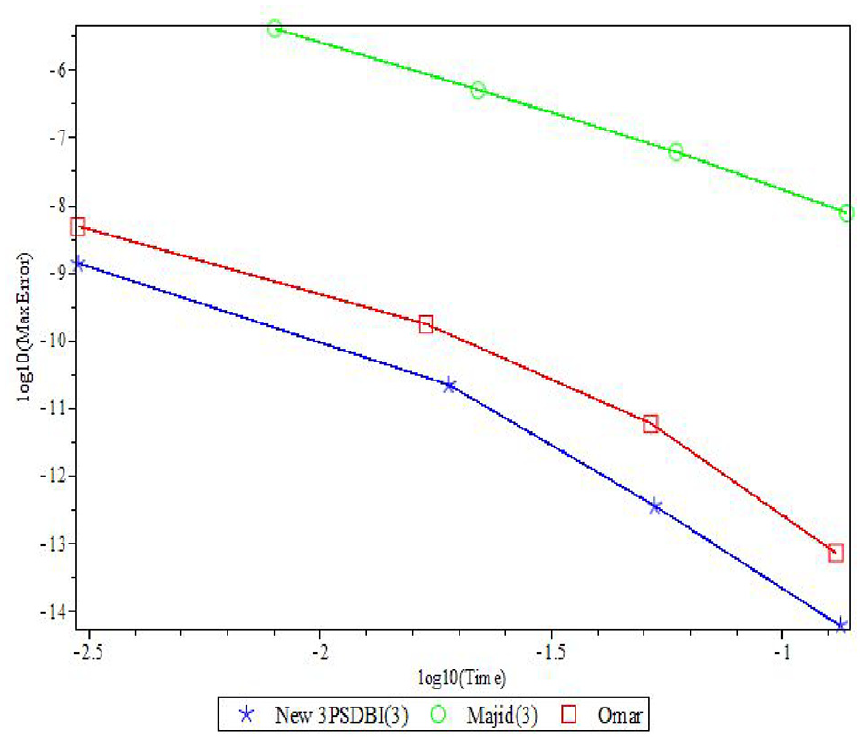
New 3PSDBI(3)
:
Order six, the newly proposed three-point additional derivative block method.
Majid(3):
:
Order seven, two-point four step implicit block method proposed by Majid et al.4
Omar
:
Order seven, predictor-corrector block method proposed in.8
Numerical results for 2PSDBI(3) are given in Figures 1–6, whereas for 3PSDBI(3) are given in Figures 7–12 respectively.
Comparison of the methods (New 2PSDBI(3)) for problem 1.
Comparison of the methods (New 2PSDBI(3)) for problem 2.
Comparison of the methods (New 2PSDBI(3)) for problem 3.
Comparison of the methods (New 2PSDBI(3)) for problem 4.
Comparison of the methods (New 2PSDBI(3)) for problem 5.
Comparison of the methods (New 2PSDBI(3)) for problem 6.
Comparison of the methods (New 3PSDBI(3)) for problem 1.
Comparison of the methods (New 3PSDBI(3)) for problem 2.
Comparison of the methods (New 3PSDBI(3)) for problem 3.
Comparison of the methods (New 3PSDBI(3)) for problem 4.
Comparison of the methods (New 3PSDBI(3)) for problem 5.
Comparison of the methods (New 3PSDBI(3)) for problem 6.
Noted too that the methods can be used to solve physical problems such as the well-known thin film flow problem,15 Blasius equation16 and the nonlinear Genesio equation,17 and we can treat it as further research.
Discussion and conclusion
Here, we presented the construction of the two and three-point additional derivative block methods which are zero-stable for directly solving . The methods are used to solve linear and nonlinear problems. Numerical results are presented in the form of efficiency curves, where the common logarithm of the maximum global errors, were plotted versus the computational time in seconds. Graphs in Figures 1–6 show the efficiency curves of the proposed 2PSDBI(3) method as compared to Abdullahi and Olusola methods. From the efficiency curves the graphs of the new 2PSDBI(3) lie well below the graphs of methods by Abdullahi and Olusola, this shows that 2PSDBI(3) method can achieved smaller maximum error compared to the other two methods for the same computational time. Hence 2PSDBI(3) method is the most efficient compared to Abdulahi and Olusola methods for solving the same test problems. Though all the three methods are almost of the same algebraic order, the 2PSDBI(3) method is order five, Abdullahi method is order six and Olusola method is order five and noted too that the new proposed method is a two-point block method, Abdullahi method is a five-point block method and Olusola method is a four-point block method.
Figures 7–12 show that the efficiency curves of the proposed 3PSDBI(3) order six method compared to Majid(3) two-point block method of order seven, and Omar methods which is order seven block method. From the efficiency curves, the graphs of the new 3PSDBI(3) method lie well below the graphs of methods by Majid(3) and Omar, this shows that 3PSDBI(3) method can achieved smaller maximum error compared to the other two methods for the same computational time. Based on the results, it can be concluded that the proposed 3PSDBI(3) method is the most efficient compared to the two existing methods, though the order of the existing methods is one order higher.
It can be concluded that introducing the additional derivatives into the proposed block methods do enhanced to efficiency of the methods. Thus they have a very high potential to be an efficient solver for general third order IVPs. The methods can also be adapted for solving any third order boundary value problems, third order delay differential equations as well as third order volterra-integro differential equations.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Fudziah Ismail
References
1.
OlabodeB. An accurate scheme by block method for the third order ordinary differential equation. Pac J Sci Technol2009; 10: 136–142.
2.
MajidZASuleimanMBAzmiNA. Variable step size block method for solving directly third order ordinary differential equations. Far East J Math Sci2010; 41: 63–73.
3.
MehrkanoonS. A direct variable step block multistep method for solving general third-order odes. Numer Algorithms2011; 57: 53–66.
4.
MajidZAAzmiNASuleimanM, et al. Solving directly general third order ordinary differential equations using two-point four step block method. Sains Malays2012; 41: 623–632.
5.
BolajiBAdemiluyiRAwoyemiD, et al. A single step implicit hybrid numerical method for the numerical integration of initial value problems of third order ordinary differential equations. Can J Sci Eng Math2012; 3: 143–153.
6.
JatorSOkunlolaTBialaT, et al. Direct integrators for special third order differential equations with application to the kortewg-de vries equation. Inst J Appl Comp Math2018; 4: 110.
7.
JikantoroYIsmailFSenuN, et al. Hybrid methods for direct integration of special third order ordinary differential equations. Appl Math Comp2018; 320: 452–463.
8.
OmarZAbdullahiYAKuboyeJO. Predictor-corrector block method of order seven for olving third order ordinary differential equations. Int J Math Analy2016; 10: 223–235.
9.
AbdullahiYAOmarZKuboyeJO. Derivation of block predictor-block corrector method for direct solution of third order ordinary differential equations. Glob J Pure Appl Math2016; 12: 343–350.
10.
FatunlaS. Block methods for second order odes. Int J Comput Math1991; 41: 55–63.
11.
LambertJD. Numerical methods for ordinary differential systems: the initial value problem. New York, NY: John Wiley & Sons, Inc., 1991.
12.
AcklehASAllenEJKearfottRB, et al. Classical and modern numerical analysis: theory methods and practice. Boca Raton, FL: Chapman and Hall/CRC Boca Raton, 2009.
13.
MajidZASuleimanMOmarZ. 3-point block method for solving ordinary differential equations. Bull Malays Math Sci Soc2006; 29: 23–31.
14.
OlusolaKJ. Block methods for direct solution of higher order ordinary differential equations using interpolation and collocation approach, Ph.D. Thesis, Universiti Utara Malaysia, 2015
15.
LeeKCSenuNAhmadianA, et al. On two- derivative Runge-Kutta type methods for solving u′′′ = f(x,u( x)) with application to thin film flow problem. Symmetry2020; 12: 924.
16.
Lien-TsaiYCha’o-KuanC. The solution of the Blasius equation by the differential transformation method. Math Comput Modell1998; 28: 101–111.
17.
BatainehASNooraniSHashimI. Direct solution of nth-order ivps by homotopy analysis method. Differential Equations and Nonlinear Mechanics. Epub ahead of print 1 January 2009. DOI: 10.1155/2009/842094.