
Abstract
Based on the full-discretization method, this work presents a generalized monodromy matrix as an exact function of the order of polynomial approximation of the milling state for chatter avoidance algorithm. In other words, the computational process is made smarter since the usual derivation of the monodromy matrices on order-by-order basis – a huge analytical involvement that rapidly gets heavier with a rise in the order of approximation – is bypassed. This is the highest possible level of generalization that seems to be the first of its kind among the time-domain methods as the known generalizations are limited to the interpolating/approximating polynomial of the milling state. It then became convenient in this work to study the stability of milling process up to the tenth order. More reliable methods of the rate of convergence analysis were suggested and utilized in consolidating the known result that the best accuracy of the full-discretization method lies with the third and fourth order. It is seen from numerical convergence analyses that, although accuracy most often decreases with rising order beyond the third-order methods, the trend did not persist with a continued rise in order.
Keywords
Introduction
Regenerative vibration is a violent and noisy chatter of machine tools that limits material removal rate. It causes scraping of parts due to its inscription of vibration marks on the parts. Such compromise of integrity leads to a rise in economic loses. Regenerative chatter is self-excited and it occurs when an unfavourable phase difference occurs between two successive cuts thus it is governed by delay differential equation models. The regenerative delay differential equation models for turning process are autonomous1–9 while those of milling process are periodically non-autonomous.10–13 The stability analyses of milling processes are either in the frequency domain or time domain. Frequency-domain approaches are based on truncated Fourier series expansion of the periodic coefficients and utilization of the Nyquist stability criterion.14–18 A frequency domain approach that is based on utilizing only the first term in the Fourier series expansion of the periodic coefficients is called the zeroth-order approximation (ZOA) method. 16 The ZOA method fails to reveal the flip bifurcation that appears in low radial immersion milling.19–21 Another frequency domain approach that overcame the shortcomings of ZOA is based on utilizing additional higher order harmonics in the Fourier series expansion of the periodic coefficients. It is called the multi-frequency solution method. 13 Insperger and colleagues22–24 introduced a time-domain approach called the semi-discretization method which was later improved for computational efficiency and accuracy by Henninger and Eberhard. 25 The semi-discretization method basically involves discretizing the delayed term while leaving the undelayed terms undiscretized and approximating the periodic coefficient matrices as piecewise constant functions thus allowing the formation of ordinary differential equations from which a monodromy matrix is constructed. Further applications of the semi-discretization method can be seen.26–31 The semi-discretization method has been recently reconstructed with Shannon standard orthogonal basis by Dong et al. 32 to generate an equally accurate but much faster method. Temporal finite element analysis was introduced for milling process stability analysis by Bayly et al. 33 The method has been applied in the stability analysis of milling process in other works.34–37 A cluster treatment of characteristic roots for stability analysis of autonomous delayed systems and regenerative machining was developed by Olgac and Sipahi.38–40 Chebyshev collocation method was introduced for stability analysis of milling by Butcher et al.41,42 Shifted Chebyshev polynomials were very recently applied in the prediction of stability of milling thin-walled workpiece by Yan et al. 43 Ding et al. 44 introduced the method of full-discretization which discretized the delayed state like the semi-discretization method and further discretized the current state. The structure of the full-discretization method (FDM) allows the reduction of computational time relative to the semi-discretization method. The FDM, as applied in the stability analysis of milling, can be classified into two: the methods based on the interpolation theory44–49 together with the more-time-saving methods based on the approximation (from the least squares sense) theory50,51 and the methods based numerical integration which are further sub-divided into those based on Newton–Cotes method52–54 and those based on spectral method. 55 The FDM has been applied in the study of different aspects of milling, for example, the least squares version has been applied56,57 in minimizing pocketing time. Complete discretization method for prediction of milling stability was introduced by Li et al. 58 The method not only discretizes the delayed state and the current state like the FDM but further discretizes other terms. An improved complete discretization method has been proposed very recently. 59 A generalized Runge–Kutta method based on Volterra integral equation of the second kind has been proposed by Niu et al. 60 A wavelet-based approach has been proposed for the stability analysis of periodic delay differential equations with discrete delay and application of the method demonstrated with the milling process by Ding et al. 61
Detailed review of the development of the FDM, as seen in the works,44–51 shows that each of the available first- to fifth-order methods were derived from the first principles. The derivation process requires a computation of a polynomial of needed order, an evaluation of a vector/matrix integration problem and a manipulation of the arising results towards constructing a monodromy matrix. This process rapidly gets too complicated and unwieldy with rising order. Increase in order was necessitated by the initial recognition that it causes a rise in the accuracy of the method. The aim of this work is to derive the FDM of general-order p such that a monodromy matrix of general-order results, preempting the difficult derivation process in future use of the method. Such generalized monodromy matrix could then be written down at the specification of the order of approximation. The proposed generalization is carried out on the first class of the FDMs that are based on the interpolation/approximation theories. Specifically, the generalization is carried out on the methods based on the approximation theory because they are of same accuracy as those based on the interpolation theory but considerably saves more computational time. 50
A mathematical model of milling process
The milling models presented in this section are adaptations from existing works such as Ozoegwu et al. 51 The model that conforms with the stability analysis based on the FDM is

where the matrices and the state vector for the 1 degree of freedom (1DOF) model has the form



The symbols

The symbols
The parameters used in all numerical computations.

DOF: degree of freedom.
These parameters are identical with the experimentally determined parameters of Bayly et al. 33
The symbol w, as seen in the non-zero element of

where


A generalized order FDM
The discrete delay

The general p-order least squares approximation of

The matrix



Equations (11a)-(11c) are introduced in equation (10) and evaluated to give the general form

where

Equations (12)–(14) are inserted into equation (9) and the integration carried out between the limits

where for

and for


The symbol






The monodromy matrix for the system is constructed as

where

and




The summary of generating the general p-order least squares approximated full-discretization method (LSAFDM) simply involves
Making use of equation (17) and equations (18a)-(18c) to generate the (
The
The first-row sub-matrices of the local transition matrices
Finally the monodromy matrix
Application in deriving known first- to fifth-order FDMs
Generating LSAFDM at a given numerical value of p previously required challenging analytical processes of deriving the p-order polynomial and evaluating the symbolic integration problem needed to get to the discrete transition. On the traditional order-by-order basis, FDM requires discretization, modelling of state variation between mesh points through approximation/interpolation, solution of complex integration problem and manipulation of results to get the
Application in deriving hyper-fifth-order FDMs
Investigation of FDM beyond fifth order is carried out with the presented generalization. The process of generalization, though rigorous, has truncated the most difficult analytical steps (generation of relevant polynomial and handling of a convoluted integration problem) in the generation of FDM of any given order such that any needed FDM can directly be written down. Making use of the presented general p-order FDM, the sixth- to tenth-order LSAFDMs are directly written down (as given in Table 4 in Appendix 3) and numerically studied in the following sections.
Error and convergence analysis
The 1DOF case
The estimate of numerical rate of convergence with rising approximation parameter (ENRCAP) of maps has been determined by considering how fast the function
Illustrating the superiority of

(a) Plot of
The ENRCAP based on

(a) A plot of
Further calculations of ENRCAP and calculations of computational time (CT) for ENRCAP at additional depth-speed pairs, chosen on the basis of central composite design, indicate that accuracy most likely peaked at the third order, and that CT rises with a rise of order as shown in Figure 4. The natural and coded levels of the depths and speeds used in the simulation are given in Table 2. The coded levels are used to title each element of Figure 4. Among the nine numerical experiments shown in Figure 4, the third-order method is the most accurate in six cases and the first, second and fourth are each the most accurate in a single case.

Calculations of estimate of summed deviations from the reference spectral radii (ESDRSR) and calculations of computational time (CT) of ESDRSR at depth–speed pairs chosen on the basis of central composite design. The plots are titled with the coded depth–speed pairs.
The natural and coded levels of the depths and speeds used in the simulations of Figure 4.

The 2DOF case
Equation (1) also governs the 2DOF model but with the matrices and the specific force variation changed as seen in Ozoegwu et al.
51
Therefore, the generalization does not discriminate between 1DOF and 2DOF systems. To compare the accuracy of various orders of the generalized monodromy for 2DOF model, the
The parameters used in all numerical computations for 2DOF systems.
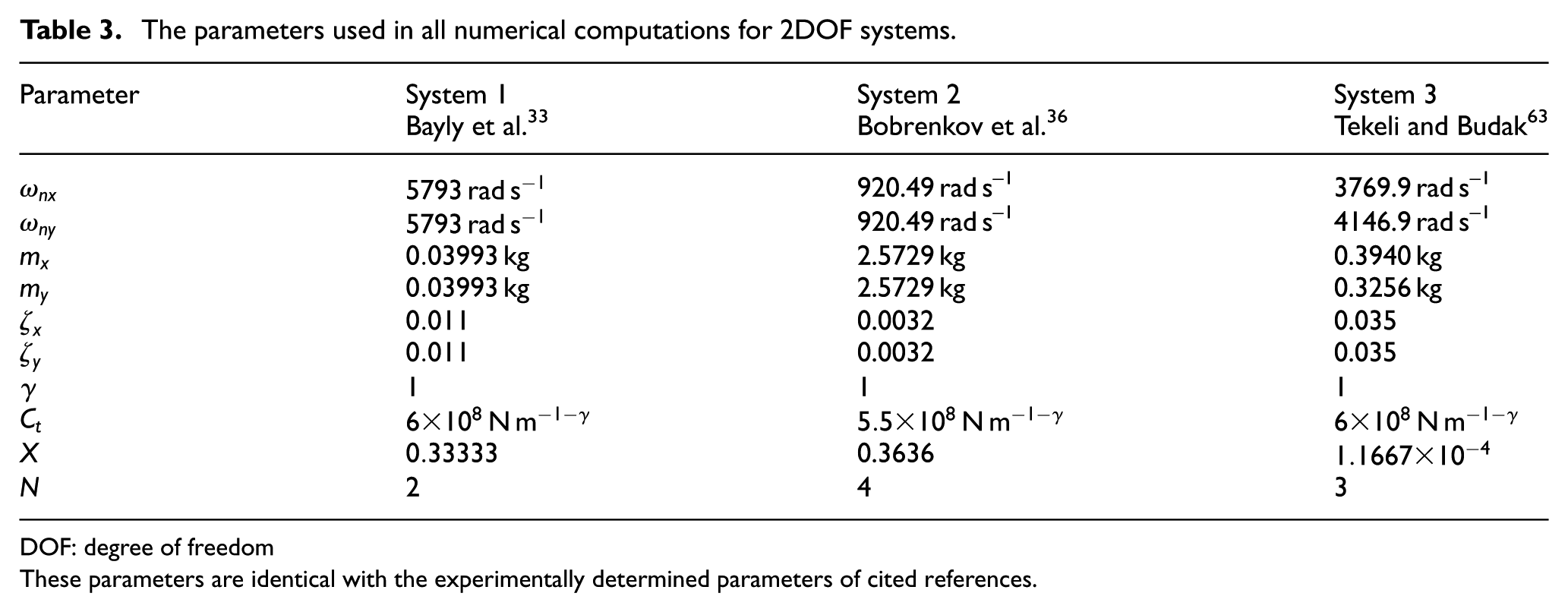
DOF: degree of freedom
These parameters are identical with the experimentally determined parameters of cited references.

The System 1 plots of

The System 2 plots of
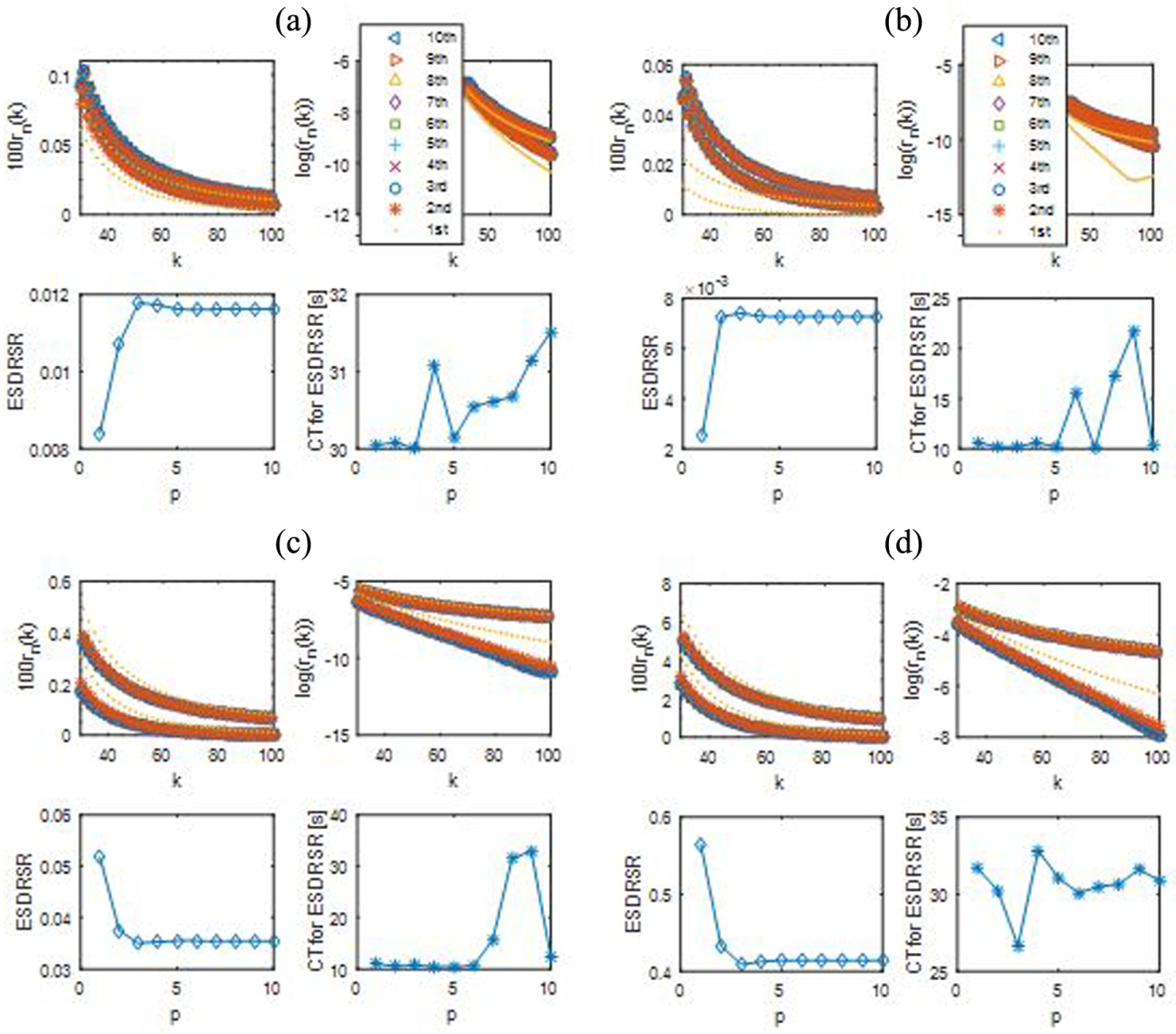
The System 3 plots of
By comparing the exact Taylor series solution of milling process and the approximate solution as given in equation (15) over the first discrete interval
The condition for asymptotic stability is that all the
Conclusion
This work generalizes the FDM such that the monodromy matrices are presented as exact function of the order of state approximation. In other words, the usual derivation of monodromy matrices of various FDMs on order-by-order basis (which entails heavy analytical involvement that rapidly gets heavier with the rise in the order of approximation) is bypassed. This is the highest possible level of generalization that seems to be the first of its kind among the time-domain methods. The known generalizations are limited to the interpolating/approximating polynomial of milling state. A potential application is complete computerization of stability analysis such that order of approximation is input with the stability diagram as output rather than the usual time-consuming approach of programming on order-by-order basis. This generalization has made it convenient in this work to study the stability of milling process with the FDMs of first- to tenth-order. By considering the actual geometric nature of characteristic multipliers as complex numbers, more reliable methods for rate of convergence analysis are suggested and utilized in consolidating the known result that best accuracy of the FDM lies with the third- and fourth-order methods. It is seen from numerical convergence analyses that, although accuracy decreases with rising order beyond the third- and fourth-order methods, the trend of decreasing accuracy did not persist with rise of order. The generalized method proved to be very accurate in the stability analysis of 2DOF milling process; less than 0.01% error was attained within
Footnotes
Appendix 1
Appendix 2
Appendix 3
The sixth- to tenth-order LSAFDMs directly written down using the presented general p-order FDM.

|
|
|
|
|
|
|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|||
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
||
|
|
|
|||
|
|
|
|||
|
|
||||
|
|
LSAFDM: least squares approximated full-discretization method; FDM: full-discretization method.
Handling Editor: Peter Nielsen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.