
Abstract
An approach to the dynamic modeling and sliding mode control of the constrained robot is proposed in this article. On the basis of the Udwadia–Kalaba approach, the explicit equation of the constrained robot system is obtained first. This equation is applicable to systems with either holonomic or non-holonomic constraints, as well as with either ideal or non-ideal constraint forces. Second, fully considering the uncertainty of the non-ideal force, that is, the dynamic friction in the constrained robot system, the sliding mode control algorithm is put forward to trajectory tracking of the end-effector on a vertical constrained surface to obtain actual values of the unknown constraint force. Moreover, model order reduction method is innovatively used in the Udwadia–Kalaba approach and sliding mode controller to reduce variables and simplify the complexity of the calculation. Based on the demonstration of this novel method, a detailed robot system example is finally presented.
Introduction
A constrained robot system is a typical mechanical system. The control of this kind of system usually needs some dynamic equations. It is known that the robot system has characteristics of high coupling, nonlinearity, and uncertainty in trajectory tracking. As a result, it is almost impossible to build a model of the robot dynamics perfectly. Fortunately, this solution of this problem is vigorously worked since the constrained movement technique was proposed by Lagrange. 1 He developed a Lagrange multiplier method for solving constrained movements. However, in practical engineering applications, it is difficult to get the Lagrange multiplier, which leads to the difficulty of obtaining this equation. Then, Gauss 2 provided a new common principle for motions of constrained mechanical systems, which can be applied in constrained robot systems. Gibbs 3 and Appell 4 also present the comprehensive equation of movement which is apprised highly by Pars; 5 however, the equation is difficult to deal with large degree of freedom (DOF).
Professors Udwadia and Kalaba6–9 proposed the equation of the multi-body system motion under the constraint condition, which is one of the important achievements in Lagrange mechanics field. This equation is applicable to a variety of constraints, such as holonomic and non-holonomic constraints. Later on, they extended their work to the non-ideal constraint system and general mechanical system. The merit of their method is that the system they focus on may not meet D’Alembert’s principle, 10 while other works are almost on the basis of D’Alembert’s principle. Attributing to the simple and general expression, this equation has attracted more and more attentions and has been applied in many different fields.
In recent years, researchers have done much work to obtain the dynamic model and control of the constrained robot. Liu and Liu 11 got dynamic modeling of industrial robot subject to constraint using the Udwadia–Kalaba equation, and the ideal constraint force is taken into consideration. Su et al. 12 used a sliding mode control algorithm in the constrained robot system, but the approach ignored the constraint force which is indispensable in practical application. Wang et al. 13 primarily studied the variable control of non-holonomic constraints. Wanichanon et al. 14 proposed a general sliding control scheme on the holonomic and non-holonomic constraints. On the foundation of their work, the ideal force and non-ideal force are both taken into consideration and a novel dynamic model is established.
Actually, a constrained robot system usually suffers from the constraint force, which is commonly caused by the end-effector of the robot being constrained on a surface. In practice, the constraint force which is produced on the constraint surface cannot be ignored. This constraint force can be divided into two parts. One is the normal force which is regarded as the ideal constraint force. Thanks to the Udwadia–Kalaba approach, it can be used to obtain the dynamic model combined with normal force in constrained robot system, and the explicit expression of the normal force can be obtained. The other is the tangential force which can be seen as the non-ideal constraint force. Non-ideal constraint forces often include friction force and electromagnetic force. Note that the friction force cannot be ignored in the constrained robot system, but unfortunately it cannot be calculated. In the simulation, the friction force can be obtained by first giving an initial condition and then introducing the sliding mode control method to track the trajectory and force.
The constrained robot system is a very complicated multi-input multi-output (MIMO) nonlinear system, which has several dynamic characteristics of time-varying, coupling, and nonlinear. For these characteristics, neural adaptive control and sliding mode control are regularly used to control the constrained robot, and lots of researchers have achieved good results. S Frikha et al. 15 proposed an adaptive neural sliding mode control scheme with Lyapunov criterion for typical uncertain nonlinear systems, and neural network was used to estimate the structural model of the system. H Wei et al. 16 used adaptive neural network control with full-state feedback for an uncertain constrained robot, which can effectively guarantee the performance and improve the robustness of closed-loop system. R García-Rodríguez and V Parra-Vega 17 designed a neural sliding mode control scheme for constrained robots based on Lyapunov function, which can prove the robustness of closed-loop system and finally conclude convergence of position and force tracking errors. Liu et al. 18 proposed neural network control which is based on adaptive learning design for nonlinear systems with state constraints, in which signals of the closed-loop system are bounded and the tracking error converges to a bounded compact set.
In this article, the sliding mode control19–21 is used to trajectory tracking of the end-effector on a vertical constrained surface to obtain actual values of the unknown constraint force. The sliding mode control is also called the variable structure control, which is proposed by Soviet scholars Utkin and Emeleyanov. The structure of the sliding mode control system is constantly changing as the current state, so that the system is moving according to a predetermined trajectory. The sliding mode control method is suitable for the robot control because of its two benefits. On one hand, the sliding mode control does not need the accurate mathematical model of the controlled object. As mentioned above, in the constrained robot system, the non-ideal force can only be obtained by experimentation or observation. Therefore, utilizing this benefit, the sliding mode control algorithm is appropriate to achieve trajectory and force tracking. On the other hand, the sliding mode control is invariant to uncertainty factors such as parameters perturbation and the external disturbance. This benefit can ensure the control performance of the system due to the random interference. The main contributions of this article are as follows:
By the Udwadia–Kalaba equation, the ideal and non-ideal forces are both taken into consideration. Because the non-ideal constraint force is hardly calculated but only can be obtained by the experiment or the experience, the sliding mode control algorithm is developed for tracking the non-ideal force (the dynamic friction) in the constrained robot system. In this way, the dynamic equation of the constrained robot is more complete and the non-ideal force can be obtained theoretically. This contribution gives a theoretical basis for the future experiment investigation.
The major innovation of this article is the establishment of a new order reductive dynamic equation and sliding mode controller to describe the constrained robot motion. The model order reduction method not only can simplify the complexity of the calculation but also can be extended to multi-degree of the constrained robot system.
The outline of this article is organized as follows. First, Udwadia–Kalaba approach is described in detail. Second, the dynamic model of the constrained robot system is obtained by the order reduction and Udwadia–Kalaba approach and the sliding mode control algorithm is derived. Third, the 2-DOF robot with vertical constraint is used as the example to specify and verify the correctness of the Udwadia–Kalaba approach and sliding mode control approach. Fourth, some conclusions are presented.
Detail the Udwadia–Kalaba approach
To the robot system without constraint, the dynamic equation of n-DOF robot is established with Lagrange method 22

where


It is assumed that the constraint form of this robot system can be described by

and

where

where A referred to as
When the system is constrained and additional set of forces act on the robot system, which can be called the constrained system, the motion equation of the constrained robot system is given by

where
According to D’Alembert’s principle, constraint forces can do positive, negative, or zero work under virtual displacement in the constrained system. When constraint forces do no work, they are called ideal constraint forces. While constraint forces do work, they can be named as the non-ideal constraint force which is the dynamic friction in this article. Therefore, when the constrained robot system exists ideal and non-ideal constraints in the same time, the

where
Assuming that the virtual displacement
24
is

While the work done by the non-ideal constraint force

The form of the ideal and non-ideal constraint force has been given by Udwadia and Kalaba 6

and

where
From above all, the equation of the constrained robot system is given by

Remark
Non-holonomic constraint is the constraint that contains time derivatives of the generalized coordinates of the system, which is not integrable. While, non-ideal constraint is the one that does virtual work which is not equal to zero in any particle system. So, non-holonomic and non-ideal constraints are naturally different in the aspect of definition. In this article, holonomic and non-holonomic constraints, as well as ideal and non-ideal constraints are used to indicate different kinds of constraints in the constrained robot systems. And according to the Udwadia–Kalaba approach, the explicit equation of the constrained robot system is applicable to all holonomic and non-holonomic (ideal and non-ideal) constrained systems no matter whether they satisfy D’Alembert’s principle.
Model reduction
The constrained robot is a typical mechanical system. The 2-DOF robot with vertical constraints is shown in Figure 1 below.

2-DOF robot with vertical constraint.
As shown in Figure 1, it is the schematic diagram of 2-DOF robot with the vertical constraint. Let
The equation of the constraint is written as 20

where

where h is two times continuously differentiable, then the equation of constraints in joint space is obtained

In the constrained robot system,

where

From equations (1), (7), (8), and (17), the dynamic equation of the 2-DOF constrained robot is given by

Since the end-effector of the robot is constrained in the vertical surface, DOFs of the robot system changed from two to one. Here, choose

And then from equation (20), one can obtain

and

where
Therefore, equation (19) is expressed in the reduced form as

where
Remark
Equation (23) is the basis for the control purpose of the constrained robot system.
Now multiply both sides of equation (23) with

Equation (24) can be simplified as

By exploiting the structure of equations (23) and (25), three properties can be obtained: 25
Property 1: Define the matrix
Property 2: Define the matrix
Property 3:
Three properties are the basis of the design for the sliding mode control laws.
To obtain the practical dynamic friction in simulation, the
Situation 1: When
Situation 2: When

Situation 3: When

To be sure, the value of
Sliding mode control for the constrained robot system
In this section, a general tracking problem for the constrained robot system is considered. As the desired joint position
Defining



where
The sliding surface is defined as


The sliding controller is defined as

where
The item for controlling the dynamic friction is given by

where
From equation (34), the following equation is obtained

Using equations (23), (31), and (33), the following equation can be obtained

Multiply both sides of equation (36) with

The Lyapunov function is taken as

Differentiating equation (38) with respect to time gives

Considering the skew symmetric property of

Substituting equation (37) into equation (40), one can obtain

Since

According to equations (35), (36), and (42), it is obvious that

The following can be known by LaSalle theorem

Simulated example
As shown in Figure 1, the 2-DOF robot with vertical constraint is used to verify the correctness and reliability of the proposed dynamic model and the sliding mode control method. Detailed matrices in equation (1) are shown in the following


where
According to equation (2), the external resultant force without constraint can be obtained as 26

In equation (48), because the robot has not been constrained, the vector of applied joint torque is
As shown in Figure 1, the position of the end-effector is obtained as

where
Considering the end-effector of the robot is constrained with the vertical surface, one can get

Taking time derivation twice on equation (50), one can obtain
Differentiating equation (49) with respect to time twice, the following equation is given by
where the three parameters m, n, and p are functions of physical parameters

Substituting equation (52) into equation (51), the second-order constraint equation 23 is shown as

in which

Now, M, A, b, and Q have been obtained, so the ideal constraint force
As shown in Figure 1, the constraint function is

Since the constraint equation is

According to equation (18), the following is obtained

Two situations to get the value of
Situation 1: When
Situation 2: When
In simulation, it is assumed that

The robot is constrained by the vertical surface, so

The relationship between

According to equation (61), one can obtain

For the simulation, the reduced order model is used as the controlled object. The initial position is
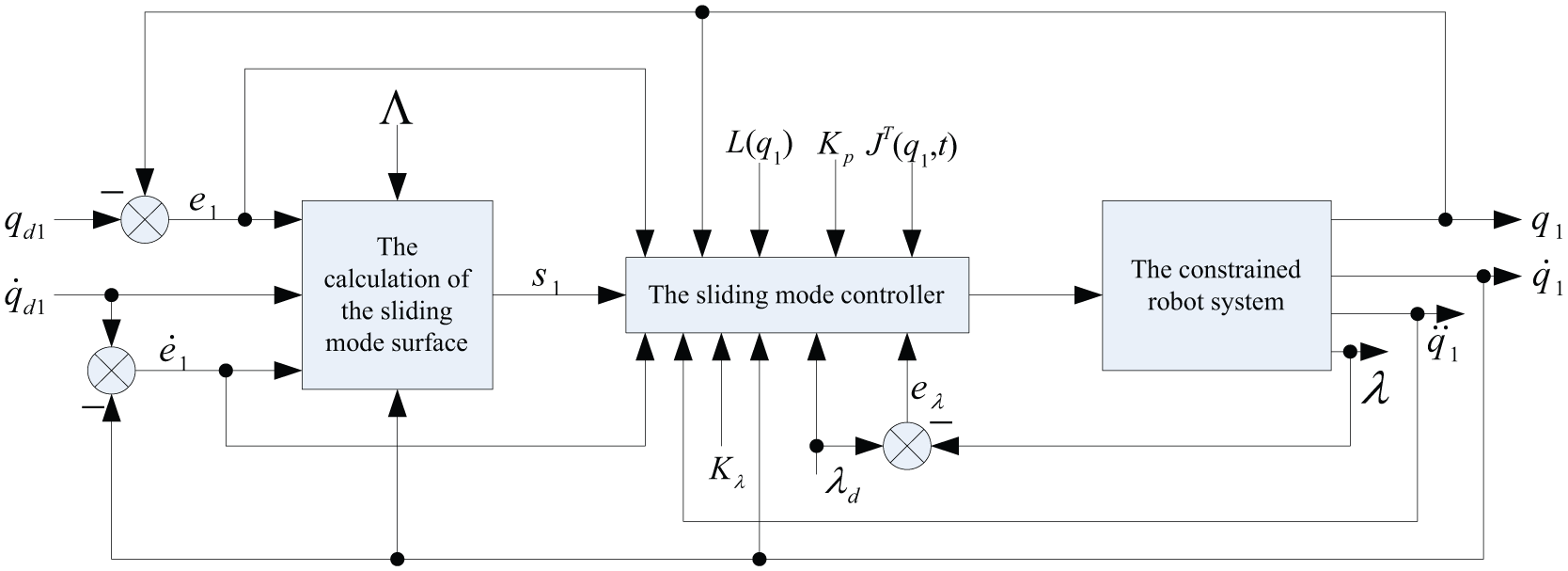
The control scheme of the controlled system.
Simulation results are shown in Figures 3–8.
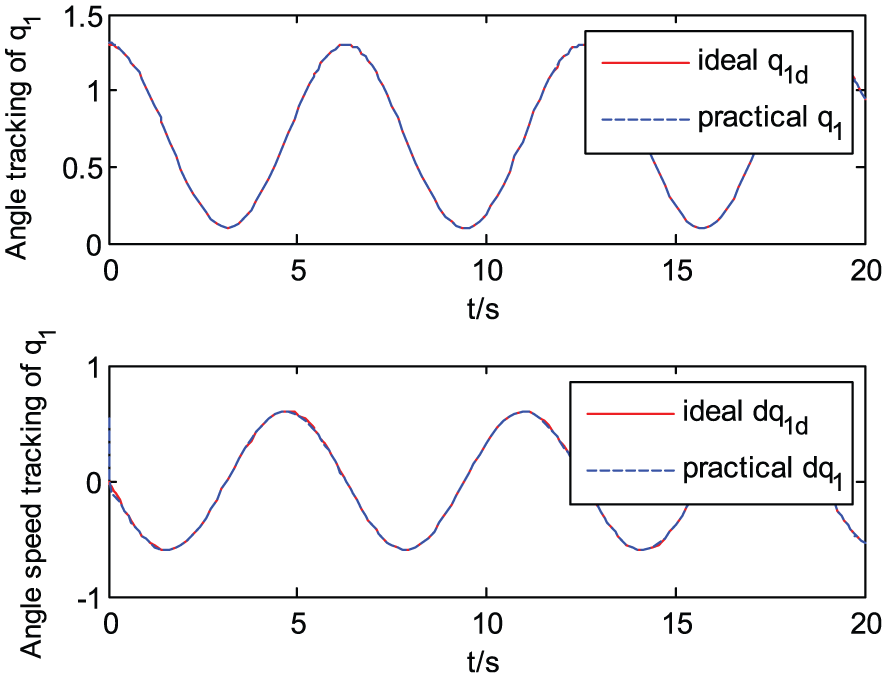
The angle and angle speed tracking of the first link.

The angle and angle speed tracking of the second link.

Tracking errors of angles of the robot.

Tracking errors of angle speed of the robot.
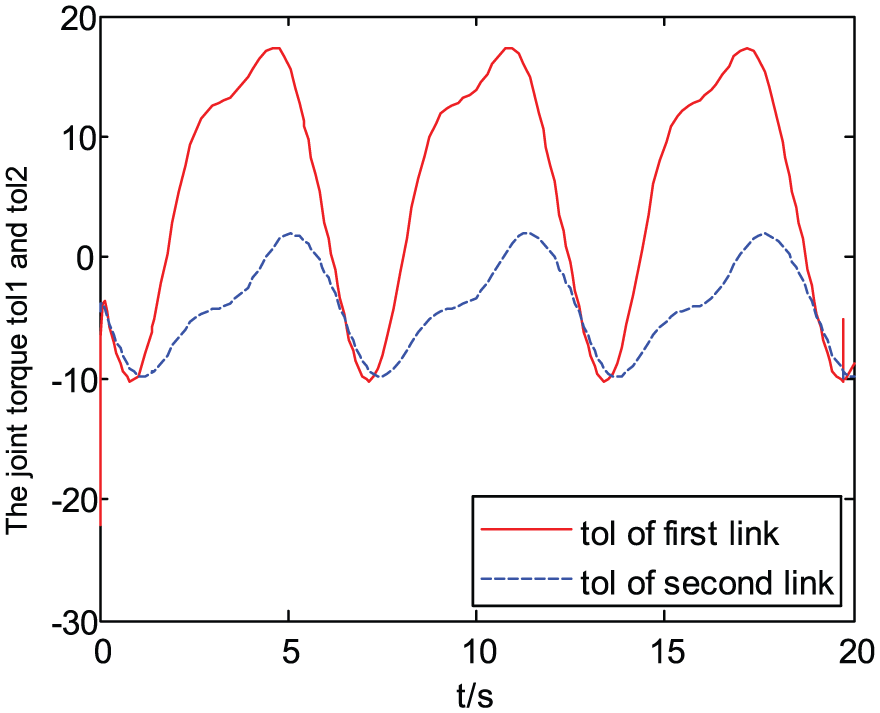
The torque of the constrained robot.

The tracking and tracking error of the dynamic friction.
Figures 3 and 4 show angles and angle speed tracking of the constrained robot, in which Figure 3 represents the first link and Figure 4 represents the second link. In Figure 3, solid red lines represent ideal values of
Figures 5 and 6 show tracking errors of angles and angle speed of the constrained robot system. It is obvious that tracking errors of angles and angle speed are almost equal to zero. In the stable region of Figures 5 and 6, the maximum error of
Figure 7 represents the torque of the constrained robot, in which the solid red line represents torque values of the first link and the dashed blue line represents torque values of the second link. Because the second link is little affected by the static moment and the first link is affected by the static and dynamic moments,
Figure 8 shows the tracking and tracking error of the constrained dynamic friction, which can be seen as the non-ideal force in Udwadia and Kalaba theory. It is observed that the dashed red line represents desired values of
From the above figures, these simulation results show that the dynamic model and the sliding mode control algorithm are achieved successfully.
Conclusion
In this article, a novel approach to the dynamic modeling and sliding mode control of the constrained robot system is proposed. By the Udwadia–Kalaba equation, expressions of the ideal and non-ideal forces are obtained and then the dynamic equation of the constrained robot system is established. Because the non-ideal constraint force is hardly calculated, the sliding mode control algorithm is presented for tracking the non-ideal force (the dynamic friction) in the constrained robot system. The major innovation in this article is the establishment of a new order reductive dynamic model and sliding mode controller to describe the constrained robot motion. Due to the lack of freedom, model order reduction method is creatively used in the Udwadia–Kalaba approach to complete the simulation of the constrained robot system. The model order reduction method can simplify the complexity of the calculation and can be extended to multi-degree of constrained robot system. A simple 2-DOF robot system with the vertical constraint is used to illustrate the methodology proposed in the article. From several simulation results, it can be found that the tracking errors are almost equal to zero. So, the proposed model and control method are feasible, correct, and valid.
Footnotes
Academic Editor: Elsa de Sa Caetano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.