
Abstract
In order to improve the high-precision tracking control of angle variables and the sliding mode equivalent control part for the 3-RRS parallel manipulator, an adaptive neural network fuzzy sliding mode control algorithm with self-adjusting switching gain is proposed. Firstly, considering the uncertainty of the constrained force between derived links and the moving platform, the complete dynamic model including ideal and non-ideal constrained force is established by combining with the Udwadia-Kalaba(U-K) equation and Lagrange method. Secondly, the neural network sliding mode controller is designed to realize the approximate solution of the sliding mode equivalent control part. At the same time, in order to reduce the chattering phenomenon of the neural network sliding mode controller, a fuzzy adjustment rule of switching gain is designed to better compensate for the uncertain terms. And then the stability of the control system is proved by the Lyapunov method. Finally, the proposed control algorithm is simulated on the 3-RRS parallel manipulator. The simulation results show that the chattering phenomenon is overcome. The high-precision control of angle variables and the sliding mode equivalent control part is realized.
Keywords
Introduction
Parallel manipulator has many advantages,1,2 such as high motion accuracy, large stiffness, high load-to-weight ratio, good dynamic performance, easy to control, and so on, which form a complementary relationship with serial manipulator in automation applications. Therefore, the parallel manipulator has been widely used in industrial fields such as aviation, machining, medical devices. In recent years, the 6-DOF parallel manipulator is more studied due to its outstanding advantage in static stiffness. However, the performance in the workspace and machining accuracy has disappointed the scholars. In many cases, 2–5 DOFs parallel manipulator could satisfy the actual requirements. This kind of parallel manipulator with less than 6-DOF is called lower-mobility parallel manipulator. 3 The lower-mobility parallel manipulator has high practical value and great application potential because of its few driving elements, low cost and compact structure. Many scholars have successively carried out research on lower-mobility parallel manipulator, especially the 3-DOF parallel manipulator, such as the famous Delta, 3-RRR, 3-RPS, and so on.
The dynamic model of parallel manipulator is the basis of dynamic characteristics research and system motion control. The research methods of parallel manipulator dynamics mainly include the Newton-Euler equation, 4 D’Alembert-virtual displacement principle, 5 Lagrange equation, 6 Kane method, 7 and screw theory. 8 Based on the Newton-Euler method, Yang et al. 9 studied the inverse dynamics of a space parallel manipulator with two translational DOFs and one rotational DOF. Song 5 obtained the joint driving torque and dynamic model by eliminating the virtual displacement in the dynamic equation of 3-PUU parallel manipulator according to the virtual work principle in the form of D’Alembert. Yen and Lai 10 derived the effective dynamic equation of a 3-DOF translational parallel manipulator by using Lagrange and D’Alembert equation. Cheng and Shan 7 deduced the dynamic model of 3RRR + 1PS space parallel manipulator based on Kane equation, which provided a theoretical basis for the structural parameter and control system design of driving links. Jaime 8 established the inverse dynamic model of 4-PRUR parallel manipulator according to the screw theory and virtual work principle.
Although the above dynamic modeling methods have been widely used in the engineering field, the analytical expression of non-ideal constrained force could not be obtained when considering the constrained force in the system. Udwadia-Kalaba theory11–15 is an important research achievement in Lagrangian mechanics in recent two decades, which provides the motion equation of multi-body system under constraints. The main contribution of the theory could be divided into two parts: on the one hand, the basic motion equation of the ideal constraints is proposed according to the D’Alembert and Gauss principle; On the other hand, considering the non-ideal constrained force could not satisfy the D’Alembert principle, the basic motion equation is improved and the analytical expression is added.
Based on the above research situation, this paper takes the 3-RRS parallel manipulator as the research object. Considering the uncertainty of the constrained force between derived links and the moving platform of the 3-RRS parallel manipulator, the complete dynamic model including ideal and non-ideal constrained force is established by combining with the U-K equation and Lagrange method. The complete dynamic model could provide theoretical support for realizing the high-precision control of angle variables and the sliding mode equivalent control part.
3-RRS parallel manipulator is a complex nonlinear system with multi-variable coupling and time-varying, and it is difficult to establish an accurate dynamic model. In addition, the conventional linear controller is difficult to achieve high precision control due to the uncertainties of model parameters, load disturbance, friction and many other uncertain factors. Because the sliding mode control does not require an accurate dynamic model and the parameters selection is not strictly. Furthermore, the sliding mode control system has the advantages of fast response speed, no overshoot and simple physical implementation. So the sliding mode control method is widely used in the control system of the parallel manipulator. Zhu et al. 16 designed a sliding mode control algorithm for the new parallel manipulator, which had strong robustness to uncertainty and interference, and realized the high-precision real-time control of the parallel manipulator. Boudjedir et al. 17 proposed a hybrid nonlinear proportional differential sliding mode controller (NPD-SMC) for trajectory tracking of the Delta parallel manipulator. Su et al. 18 proposed a sliding mode control method based on dynamic model of the Delta parallel manipulator to realize the robust trajectory tracking of uncertain model parameters.
When the sliding mode control is used alone for the parallel manipulator, the discontinuous switching characteristics of the control system will inevitably cause chattering due to the switching function.19,20 At present, many scholars have done a lot of research to weaken the chattering phenomenon and put forward many solutions from different perspectives. Schenk et al. 21 extended the sliding mode controller through feedforward dynamic inverse control for the redundant cable-driven parallel manipulator, which reduced the workload of the sliding mode controller and weakened the chattering phenomenon. Vo et al. 22 designed a disturbance observer based on sliding mode control to identify and compensate for the disturbance, which greatly reduced the gain of the required switching function, weakened the chattering phenomenon and improved the tracking performance. Wang et al. 23 proposed a controller composed of sliding mode control, fuzzy control, and low-pass filter to reduce the high-frequency chattering control signal in the sliding mode control. Yang et al. 24 introduced fuzzy logic to adjust switching function gain so that the gain could change with the interference. It has been successfully applied to the 2-DOF manipulator, which has higher accuracy and less chattering than the sliding mode controller with fixed gain. Yu and Yao 25 used a genetic algorithm to optimize the nonsingular sliding mode surface and control parameters for the 6-DOF parallel manipulator, which reduced the chattering phenomenon and improved the convergence speed. Guoqin et al. 26 proposed a novel sliding mode control method which used RBF neural network to optimize its switching gain for a 2-DOF redundant parallel robot. It was shown from the comparison of the simulation and experimental results with the fixed-gain sliding mode control that the proposed RBF neural network sliding mode control had smoother control volume. Le et al. 27 proposed a novel chattering free neuro-sliding mode controller for the trajectory tracking control of two degrees of freedom parallel manipulators which had a complicated dynamic model, including modeling uncertainties, frictional uncertainties and external disturbances.
It can be seen from the above research that only one intelligent control algorithm combined with sliding mode control can achieve the purpose of reducing chattering, but the input torque of the control system still has a small chattering phenomenon.
In this paper, an adaptive neural network fuzzy sliding mode control algorithm with self-adjusting switching gain is proposed to realize the high-precision of angle variables and modeling uncertainty. Based on the complete dynamic model of the 3-RRS parallel manipulator, the neural network sliding mode controller is designed to realize the approximate solution of sliding mode the equivalent control part. When the neural network sliding mode controller is used alone, the control system has small chattering. In this paper, a fuzzy controller is added to the neural network sliding mode controller, and a fuzzy adjustment rule of switching gain is designed, which adaptively adjusts the switching gain according to the generalized distance. The uncertainty is compensated and the chattering phenomenon of the control system is eliminated, and then the stability of the control system is proved by Lyapunov method.
The rest of this article is organized as follows: firstly, based on the U-K equation, the analytical expressions of ideal and non-ideal constrained force for the constrained mechanical system are obtained. In the next section, taking the 3-RRS parallel manipulator as the research object, considering the constrained force between the moving platform and drived links, the complete dynamic model of the 3-RRS parallel manipulator is derived. Then, for the constrained dynamic equation, an adaptive neural network fuzzy sliding mode control algorithm with self-adjusting switching gain is proposed, and the stability of the control system is proved by the Lyapunov theorem. Finally, taking the 3-RRS parallel manipulator as the simulated object, the high-precision control of angle variables and the sliding mode equivalent control part are realized, which verifies the effectiveness of the control algorithm proposed in this paper.
Udwadia-Kalaba equation
If a mechanical system consists of
Under the unconstrained condition, the motion equation of the mechanical system can be expressed as:

Where,
Suppose the mechanical system is constrained by a group

Where,

Where,

Take:

Therefore, equation (4) is expressed in matrix form as:

Where,
The force is the only reason to change the motion of the mechanical system. When considering the constrained force, the mechanical system will be subject to additional constrained force

The constrained force consists of two parts, one is the ideal constrained force and the other is the non-ideal constrained force. According to D’Alembert’s principle, the virtual work done by the ideal constrained force is zero and the non-ideal constrained force is not equal to zero. Therefore, the constrained force can be expressed as:

The Udwadia-Kalaba method has given the expressions of ideal and non-ideal generalized constrained force in the analytical form 12 :

and

Where
The complete dynamic equation of the 3-RRS parallel manipulator
Taking the 3-RRS parallel manipulator as the research object, the manipulator is shown in Figure 1. 3-RRS parallel manipulator is composed of a moving platform

3-RRS parallel manipulator diagram.
In the 3-RRS parallel manipulator,

In Figure 1, the moving and static platform of the 3-RRS parallel manipulator are equilateral triangles. The moving coordinate system

Where,

Considering the uncertain disturbance term caused by modeling error and external interference, the dynamic model of 3-RRS parallel manipulator can be obtained by deriving

Where,
In the equation, the parameters of the Coriolis force and centrifugal force matrix are:

The static platform is taken as the gravity zero potential energy surface, and the gravity matrix is:

According to the U-K equation, the constrained force can be divided into ideal constrained force and non-ideal constrained force. Therefore, the complete dynamic model of 3-RRS parallel manipulator can be obtained from equations (8) and (14):

As shown in Figure 1,
Design of the adaptive neural network fuzzy sliding mode controller
Design of the neural network sliding mode controller
It can be seen from equation (11) that the angle variable
If

Where,
Take the sliding mode function as:

Where,
The equation can be calculated from equations (18) and (19):

After solving the first-order differential of equation (20), both sides of the equation are multiplied by the mass matrix
For equation (21), suppose that:

Where,

Where,
Because the calculation of
The basis function adopts Gaussian function, and the ideal input and output algorithm of the RBF neural network is:

Where,
The input value of the network is

Therefore, the sliding mode controller can be designed as the neural network sliding mode controller according to equations (23) and (25), the equation can be expressed as follows:

Design of the adaptive neural network fuzzy sliding mode controller
In the neural network sliding mode controller of equation (26), the switching gain
The distance between the current motion point and the sliding mode surface is defined as the generalized distance, which is represented by
Design of fuzzy adjustment rules for switching gain.

Where,

Further,
Since the number of input fuzzy subsets is 7, given that

In equation (28), each matrix can be specifically expressed as:

From equations (26) and (28), the neural network fuzzy sliding mode controller can be designed as follows:

Stability analysis of the control system
Adjust the fuzzy rules before analyzing the stability of the proposed control algorithm. First, take
Design of the adjusted fuzzy rules.

According to the adjusted fuzzy rules, the neural network fuzzy sliding mode controller of equation (30) can be converted into the following equivalent controller:

From equations (21), (22), (24), and (26), we can get:
Take the vector

Then let

Where,
According to the characteristics of the manipulator:
According to the matrix relationship, it can be deduced that

In order to stabilize the control system, the adaptive laws of neural network weight adjustment and fuzzy system output are designed respectively, which are shown in the following:

Because

Substituting equation (37) and (38) into equation (36), we can get:

There is a vector set

Equation (39) can be simplified by equation (40):

When

Simulation experiment and results
In order to prove the effectiveness of the proposed adaptive neural network fuzzy sliding mode control strategy, taking 3-RRS parallel manipulator as the simulated object, the feasibility of the control algorithm is verified by simulation experiments.
In Figure 1, the desired angle variables and motion constraints of driving links are set as follows:

The second derivative of equation (43) can be obtained:

According to the constrained equation (6), equation (44) can be written in matrix form:

Take the 3-RRS parallel manipulator as a homogeneous rigid body, and set the physical parameters during simulation as shown in the Table 3:
Simulation physical parameters.

Through the physical parameters, each matrix of the dynamic equation of 3-RRS parallel manipulator can be obtained. Substituting the values of equation (45) and dynamic matrix into equation (9), the ideal constrained force can be calculated. Considering the dynamic modeling error and the uncertainty of non-ideal constrained force, the proposed control algorithm is used to approximate the sliding mode equivalent control part.
The control parameters used in the simulation are shown in the Table 4:
Simulation control parameters.

The structure diagram of the neural network fuzzy sliding mode control system proposed in this paper is shown in Figure 2:
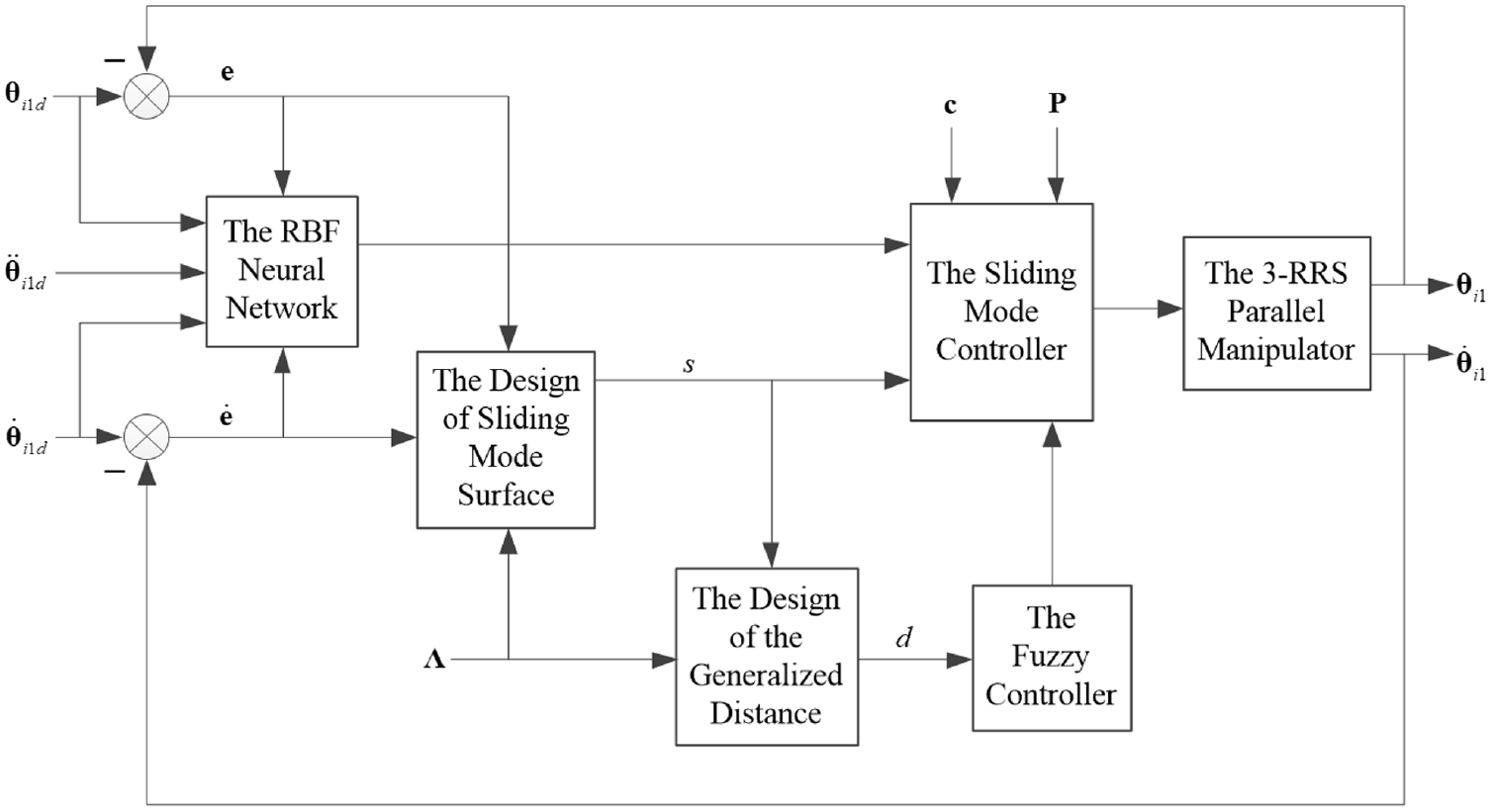
Structure of control system.
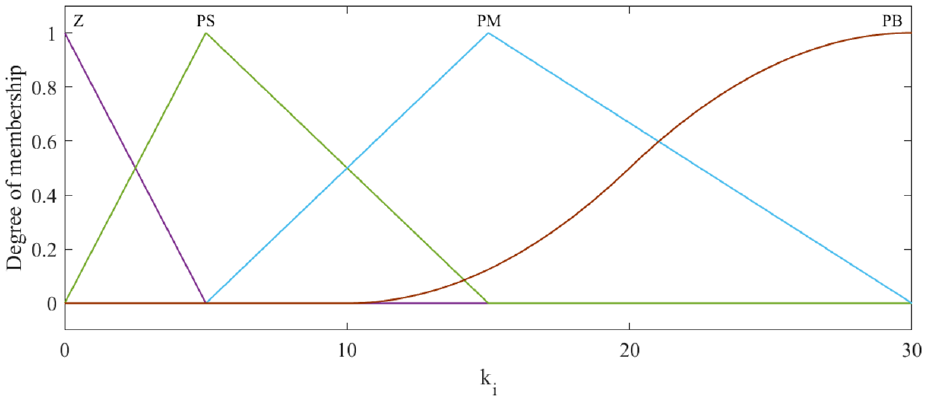
The fuzzy system membership function of the input and output fuzzy sets adopt the commonly used triangular membership function and Gaussian membership function, as shown in Figures 3 and 4.

The generalized distance
The switching gain
Simulation results are shown in Figures 5 to 9. Figures 5 to 7 give the angle variables tracking curve and tracking error for three driving links

The angle tracking and tracking error of

The angle tracking and tracking error of

The angle tracking and tracking error of

Control driving torque of driving links.
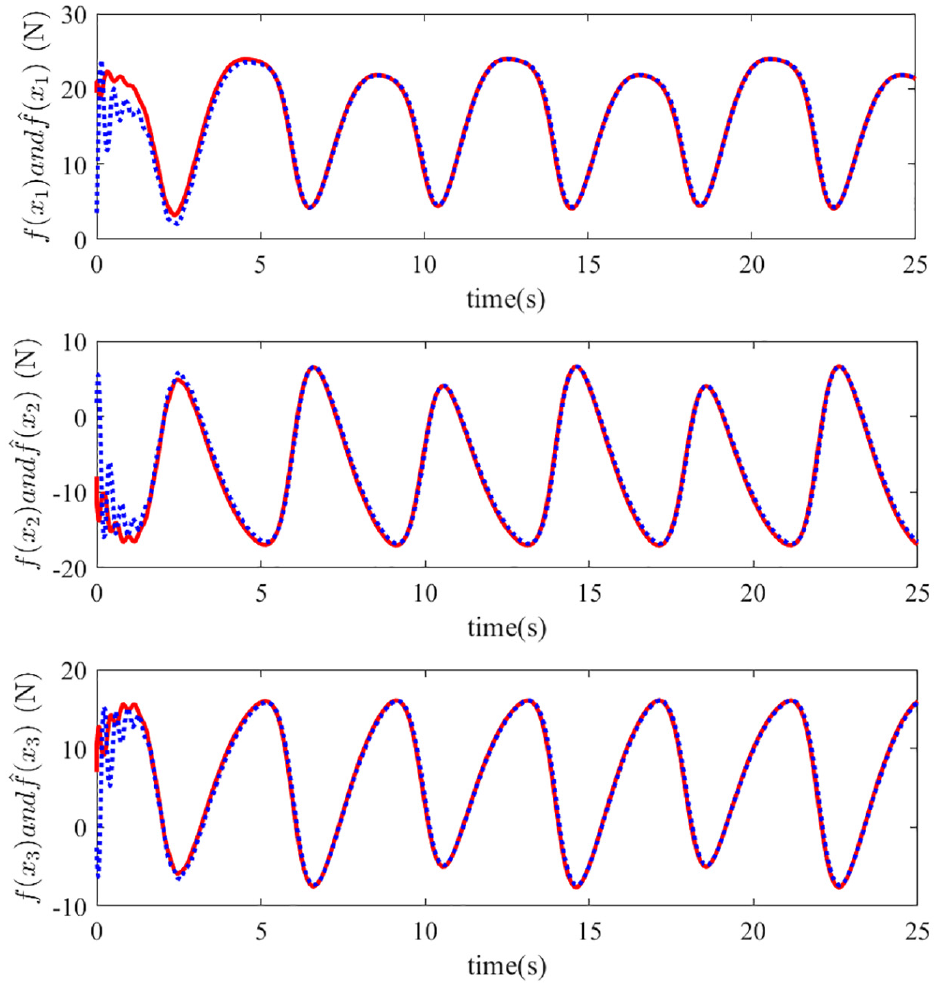
The approximation for the sliding mode equivalent control part.
Figure 8 gives the control driving torque of three driving links.
Figure 9 shows the RBF neural network approximation for the adaptive neural network fuzzy sliding mode control algorithm, the red solid line represents the value of the sliding mode equivalent control part, and the blue dotted line represents the RBF neural network approximation for the sliding mode equivalent control part.
Table 5 presents the maximum tracking errors of angle variables and the sliding mode equivalent control part in the stable stage. The maximum value of the control driving torque are given as follows:
Numerical simulation results.

Our simulation data are briefly summarized as follows:
The adaptive neural network fuzzy sliding mode control proposed in this paper realizes the high-precision tracking control of angle variables for each driving link, and the simulation results of angle variable
The simulation results show that there is no chattering phenomenon, which proves that the control algorithm proposed in this paper overcomes the chattering phenomenon of sliding mode control.
The neural network in the control algorithm could better approximate the sliding mode equivalent control part. The control algorithm proposed in this paper realizes the high-precision control of the accurate model information for the 3-RRS parallel manipulator, which is also the outstanding advantage of this method.
Conclusion
The friction between motion pairs is easy to be ignored in the accurate dynamic modeling for the parallel manipulator. At the same time, the accurate dynamic model of parallel manipulator is difficult to obtain in practical engineering. Taking 3-RRS parallel manipulator as the research object, this paper established the accurate constrained dynamic model and proposed the corresponding adaptive neural network fuzzy sliding mode control algorithm. Firstly, the Lagrange method is simple and convenient for the transformation from dynamic analysis to control model, and the analytical expression of the constrained force is obtained by using U-K equation. Combining with the U-K equation and Lagrange equation, the complete dynamic model of 3-RRS parallel manipulator including ideal and non-ideal constrained force is established. In the basis of the complete dynamic model, the neural network sliding mode controller is designed to realize the approximation of the sliding mode equivalent control part. In order to weaken the obvious chattering phenomenon of the neural network sliding mode controller, the fuzzy adaptive adjustment rule of switching gain is designed to compensate the uncertainty, and the stability of the control system is proved by Lyapunov method. Finally, taking the 3-RRS parallel manipulator as the simulated object, the high-precision control of angle variables and accurate model information for each driving link is realized, which verifies the effectiveness and correctness of the control algorithm proposed in this paper. The complete dynamic modeling method and control algorithm proposed in this paper are suitable for most constrained mechanical systems and have important engineering application value.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The Youth Innovation Promotion Association CAS Fund Project (No. 2021406); Key Laboratory of Space Precision Measurement Technology CAS Fund Project (No. 29J21-063-III).