
Abstract
Dempster–Shafer evidence theory is widely used in information fusion. However, it may lead to an unreasonable result when dealing with high conflict evidence. In order to solve this problem, we put forward a new method based on the credibility of evidence. First, a novel belief entropy, Deng entropy, is applied to measure the information volume of the evidence and then the discounting coefficients of each evidence are obtained. Finally, weighted averaging the evidence in the system, the Dempster combination rule was used to realize information fusion. A weighted averaging combination role is presented for multi-sensor data fusion in fault diagnosis. It seems more reasonable than before using the new belief function to determine the weight. A numerical example is given to illustrate that the proposed rule is more effective to perform fault diagnosis than classical evidence theory in fusing multi-symptom domains.
Keywords
Introduction
With the progress of modern production and the level of science and technology, the structure of modern engineering system is more and more complex. 1 These engineering systems play a huge role in improving the development of economy and people’s living standards. But because of long-time continuous operation and the changing environmental factors, various types of faults occurred, 2 for example, large-scale outages, forest fire insurance, and hazardous chemicals explosion. These emergencies cause massive destruction and unsafe factors.3,4 It seems that fault diagnosis5,6 is very important in our daily life.
Because the complex environment and information acquisition are not perfect, the reliability of system and information of fault diagnosis often show the random uncertainty.7,8 There is no single sensor that can reliably obtain all the information required for fault diagnosis.9,10 In order to have more accurate comprehensive understanding of the object and make a better judgment, we use many sensors in the real applications.
Information fusion technology is the collaborative use of multi-source information,11,12 in order to get more objective, more natural understanding of information integrated processing technology. It is one of the key technologies of intelligent degree to improve the intelligence system. Multi-sensor system13,14 is the hardware basis of information fusion. Multi-source information is the object of information fusion. And the cores of information fusion are comprehensive processing and coordinate information. Because of the influence of the military, 15 the development of information fusion is very fast.
As the generalized Bayesian theory,16–19 Dempster–Shafer evidence theory20,21 can deal with the evidence when a priori information is not clear. 22 It makes evidence theory applied to wide areas such as decision making under uncertain environment.23–25 It represents imprecision and uncertainty of the information. In this perspective, Dempster–Shafer evidence theory is more effective and accurate. These characteristics make it widely used in the field of information fusion. Dempster–Shafer evidence theory is an important method and can fuse the result of multi-symptom domain. 26 And it plays a very important role in fault diagnosis. However, when dealing with high conflict evidence, evidence theory will lead to a perverse conclusion. 27 To solve this problem, some researchers presented many improved combination rules, for example, Yager method, 28 Dubois and Prade method, 29 and Smets method.30,31 How to handle conflicts in evidence combination is still an open issue. Murphy presented a new methodology to combine the conflicting evidence with average operation. 32 The result seems that average method is a promising solution to address this issue. But it is not reasonable to assume that each evidence has equal weight in sensor data fusion since different sensors have different reliabilities. 33 As a result, to determine the weight of each evidence before sensor fusion is very important.
Entropy is associated with uncertainty, and it has been a measure of uncertainty and disorder. The quantity of entropy is always associated with the amount of states in a system. For the case of equal probabilities, the entropy or the uncertainty of a system is a function of the quantity of states. Moreover, the maximum entropy law widely exists in our real world. It means if we do not exactly know the detailed information when processing, the state with the maximum entropy is the most possible state. This state keeps the maximum uncertainty. It is well known that Shannon entropy is the uncertainty measure or information volume.34,35 The main idea of this work is that if one evidence has more information volume, this evidence has more impact on the final combination result. In this article, we use a new entropy function, named as Deng entropy, 36 to obtain the information volume of each sensor report. Deng entropy is the generalization of Shannon entropy. Then, we present a new weighted average method based on information volume that can increase the accuracy of decision making through fusing multi-source information.
This article is organized as follows. Section “Preliminaries” describes some basic concepts. Section “The proposed method” presents a new method based on Dempster–Shafer evidence theory. It emphasizes the compatibility of evidence, importance of evidence, and conflict of evidence. Section “Application in fault diagnosis” gives an example to prove the validity of this new combination rule. Finally, conclusions are summarized in section “Conclusion.”
Preliminaries
Dempster–Shafer evidence theory
In this part, we mainly introduce a few concepts used in Dempster–Shafer evidence theory.20,21
Let

Basic probability assignment (BPA) satisfies the following formula


BPA reflects the degree of evidence support for the proposition of A in recognition framework, namely,
Dempster’s rule of combination 37 is defined as follows


k is a normalization constant, named conflict coefficient, because it measures the degree of conflict between
Based on this, we put forward the following formulas


In the above formulas,
In Dempster–Shafer combination rule, k is a coefficient to measure the conflict between evidence. If
Set a discernment frame is

we can get the conclusion:
In order to solve this problem, there are mainly two methods. One is to modify the combination rule. Especially, the unification of the reliability function combination method by Lefevre et al. 39 There are some others: Inagaki, 40 Yager, 28 and so on introduce a method of the degree of the average support, Diniel 41 puts forward minC combination rule by considering the credibility of the method of evidence, and conditional Dempster combination rule is proposed in. 42 . Another is to modify the original data, the method of view is Dempster combination rule itself is not wrong. Many people choose this to solve the problem. The typical method is an averaged algorithm based on the consideration of the ensemble potential by Murphy method. 32
Murphy method 32 just modified data model, but not changed Dempster combination rule. Murphy analyzed the existing method and then the average combination rule was presented. First, assigning the BPAs to the average and then fusing the information by Dempster combination rule. Comparing with others, it can deal with conflict and has a fast rate of convergence. But the deficiency of this method is that it does not consider the relation and just a simple average between all the evidence.
In this article, on the basis of Murphy method, we propose a new method based on Deng entropy. With the proportion of Deng entropy as the weight of evidence and the weighted average of multi-source evidence, we can fuse information by Dempster combination rule. This method inherits all the advantages of Murphy method and has a stronger anti-interference ability and faster convergence speed.
The weight
In the process of fusion and decision making, not all evidence has the same importance in our life. Often some evidence is more effective than others. Conventional evidence does not distinguish the importance between different evidence. This method may cause the error of the result. In fault diagnosis, the influence of different fault on the whole is different.
The weight is also applied to multi-expert consultation. Every expert has own expertise and presents better opinion in this area. Let us use an example to explain this concept. There are two doctors and three kinds of diseases: A, B, and C. Doctor 1 is better at curing disease A, and Doctor 2 has more experience in treating disease B. At the same time, they both have some knowledge in A, B, and C. When we diagnose the disease of A, the weight given by Doctor 1’s diagnosis should be more effective than the weight by Doctor 2’s. If the disease is B, the weight given by Doctor 2’s diagnosis should be more effective than the weight by Doctor 1’s. According to different people having different diseases, different weights will be given.
Suppose there are m evidences, and a certain hypothesis set


Because of different reliability and significance, every evidence is described by different

In Fan’s method,
9
he uses a matrix to express the importance of BPAs. He recommends an importance weight:

Although Fan’s method is effective in fault diagnosis, there are still some shortages. First, it needs prior information, such as the importance of evidence and the reliability of sensor. They are usually uncertain in practice. Another reason is that a decision process of conflict between evidence degree is introduced. And using different combination rules on the basis of conflict degree between evidences makes this method complex.
Deng entropy
Deng entropy
36
is proposed to measure the uncertainty of BPA. It is a generalized Shannon entropy.
34
Since uncertain information is represented by probability distribution, the uncertain degree measured by Deng entropy and Shannon entropy is the same. Set
Deng entropy 36 is defined as follows

Especially, if there is only one element in each proposition, it degenerates into Shannon entropy

The more the evidence of uncertain information, the more the uncertainty it has. When Deng entropy of multiple evidences is normalized and processed, we can get the information indicator of evidence


The proposed method
Based on the above theory in this article, the following decision rule is proposed. This rule can be applied to obtain BPAs either by the method proposed or by the conventional evidence theory.
When the equipment is diagnosed, the determined fault types should have a maximum BPA, and this decision-making BPA must be greater than a threshold denoted by
Entropy is an efficient tool to measure uncertain information. It represents the redundancy of information. When
From Figure 1, the calculation process can be given. First, information should be collected and pre-processed. And all hypotheses are estimated independently by different evidences and probability distribution. Second, as shown in Figure 1, calculating Deng entropy by equation (9) of each group of BPA and normalized them. Third, making the proportion as the weight of each BPA. It represented by


Structure of fusing multi-sensor.
Then we can get a new evidence by the weighted average 32 method of multi-source evidence, and the evidence is presented by the following formula

In the end, fusing the new evidence with the original evidence by Dempster combination rule, we will get the result. Dempster combination rule can be used in the synthesis of two or more than two assumptions, and when the synthesis is more than two assumptions, it meets

When the number of original evidence is n, we should combine the new BPA for
The direct use of Dempster combination cannot make an exact decision of which kind of fault the equipment occurred. Without considering the correlation between evidence, Murphy method is still unable to judge correctly. Murphy wants to offset the disadvantages by averaging, but it is only an average of evidence. However, the method in this article considers the characteristics of the correlation and the validity among evidences.
In Lin’s method,43,44 Shannon entropy 34 is used. Both Lin’s work and ours are proposed based on entropy function. The results illustrate the efficiency. The entropy function in our method is a new belief function entropy, named as Deng entropy. 36 Compared with Lin and colleagues’ work,43,44 we use Deng entropy to measure information volume of BPAs directly. In the case that the belief function is adopted, it seems reasonable to use our method to measure the information volume and to determine the weights.
One of its advantages is that the amount of information in evidence should be driven by data entirely and does not need prior information of sensors. Another is these evidence remains the BPA of set properly, and redundancy information is left for the conflict information. We could still fuse the information effectively with high conflict. In this perspective, the new method can deal with the conflict better. The proposed method has validity and robustness; it is a simple and effective method in fault pattern recognition. The method in this article can solve the problem of conflict effectively, ensure the fusion result, and improve the accuracy of our decision.
But we still cannot solve the famous example raised by Zadeh.27,38 At the same time, if the data of evidence given by fault are huge, there will be a very complex calculation process.
Application in fault diagnosis
In this section, a simple example is given to illustrate the efficiency of the new method. In the case of motor rotor fault diagnosis, vibration signal is collected by three kinds of sensors: acceleration, velocity, and displacement. The four evaluation criteria are described in Table 1.
Output of the multi-sensors.

In this table, m1 = acceleration sensor, m2 = velocity sensor, and m3 = displacement sensor. There are four states: F1 = normal operation, F2 = unbalance, F3 = misalignment, and F4 = pedestal looseness; then we transform them into four kinds of evidences, a frame of discernment
Deng entropy: by equation (9), we can get the following entropy of each BPA

The weight by equation (13)

From Table 2, we get a new set of data.

The BPA of every fault.

The fusing result appears clearly in Table 3. Although the gap between the various methods is not great, this proposed method seems to look better. In Dempster and Murphy, their difference is small between unbalance and misalignment from Table 3. Moreover, the data of unbalance is no more than 0.7. We cannot judge what kind of fault the system has. So we think the two methods are unable to deal effectively with the evidence and make the right decision. In the proposed method, we get the inequality:
Comparison of the results of several existing methods.
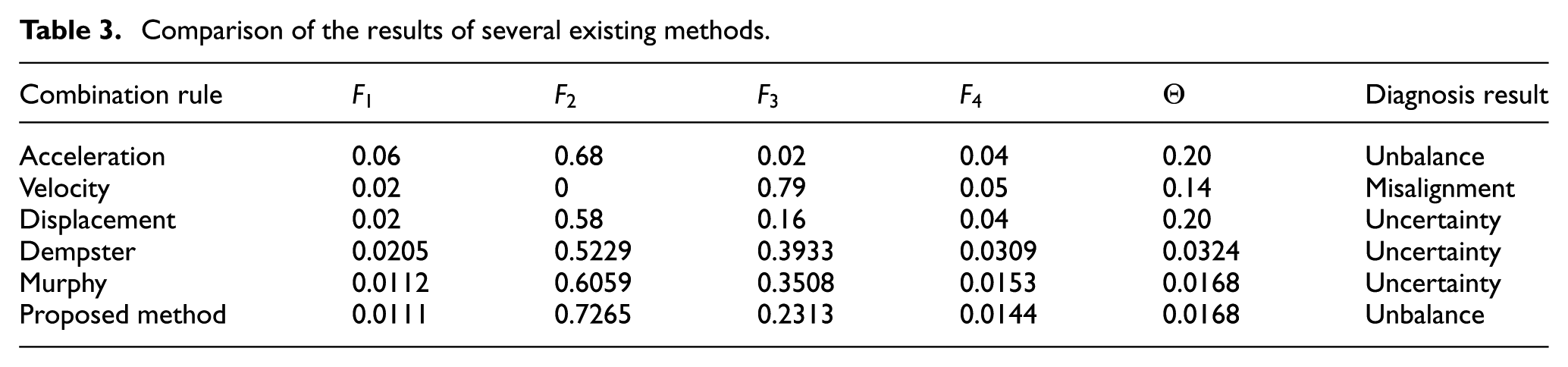
The example shows that the new proposed method performs much better than Dempster combination rule and Murphy method. The diagnosing accuracy is improved through information fusion of fault diagnosis. This proposed method reduces the confidence level of the interference evidence, also effectively reduces the impact of “interference evidence” on the final fusion result. And it improves the whole performance of the identification system. Comparing with other methods, the above example shows that the new method has validity and robustness and can be used for fault diagnosis efficiently.
In this example, due to the interference of external conditions or human factors, a single sensor may lose efficacy and the conclusion among sensors is different from Table 3. So, people cannot obtain the information directly from the sensors to determine the specific operation of the equipment.
Conclusion
In this article, a new combination rule is proposed based on information volume of each BPA. This proposed method considers the amount of information and the consistency of the evidence, so as to estimate the uncertainty of information and the degree of conflict among evidences. The greater the weight of evidence, the stronger the effect of the evidence on the fusing result. The method of weighted balance of evidence is used to reduce conflict and make the evidence with greater authority plays the more important role.
Footnotes
Acknowledgements
The authors greatly appreciate the reviewers’ suggestions and the editor’s encouragement.
Academic Editor: Hamid Reza Shaker
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by a grant from National Natural Science Foundation of China (No. 60904099) and Foundation for Fundament Research of Northwestern Polytechnical University (Grant No. JC20120235).