
Abstract
In real applications, sensors may work in complicated environments; thus, how to measure the uncertain degree of sensor reports before applying sensor data fusion is a big challenge. To address this issue, an improved belief entropy–based uncertainty management approach for sensor data fusion is proposed in this article. First, the sensor report is modeled as the body of evidence in Dempster–Shafer framework. Then, the uncertainty measure of each body of evidence is based on the subjective uncertainty represented as the evidence sufficiency and evidence importance, and the objective uncertainty measure is expressed as the improved belief entropy. Evidence modification of conflict sensor data is based on the proposed uncertainty management approach before evidence fusion with Dempster’s rule of combination. Finally, the fusion result can be applied in real applications. A case study on sensor data fusion for fault diagnosis is presented to show the rationality of the proposed method.
Keywords
Introduction
Sensors play an important role in environment sensing and information acquiring in real applications, such as fault diagnosis, 1 risk analysis, 2 route optimization, 3 image processing, 4 and so on.5,6 Driven by real applications, many methods have been proposed for multi-sensor modeling and sensor data fusion, 7 including neural network model,8,9 belief function theory,10,11 Dempster–Shafer evidence theory (D-S theory),12,13 fuzzy set theory, 14 and so on.15,16 However, sensors may be affected by the complicated application environment. How to measure the uncertain degree or the reliability of sensor reports with heterogeneous sources is also an open issue. This article will focus on multi-sensor data fusion by designing a new uncertainty measure–based sensor data fusion approach.
Uncertainty management is a key point in uncertain information modeling; many theories and methods have been proposed for intelligent information processing, such as Shannon entropy, 17 probability theory, 18 fuzzy sets, 19 fuzzy inference,20,21 D-S theory,22,23 rough sets, 24 support vector machine,25,26 belief function,27–29 evidence reasoning,30–32 and so on.33,34 Among all these methods, D-S theory can process vague information modeled in fuzzy sets, and it can lead to information convergence in data fusion. Although D-S theory is an effective method for information processing in many fields, such as multiple attribute decision-making,35–38 risk analysis,39–44 pattern recognition,45–50 fault diagnosis,11,13 controller design,51,52 and so on,53–56 the classical Dempster’s rule of combination cannot be used directly for conflict sensor data fusion, especially when there exist highly conflict data, because it may lead to counterintuitive results.57,58
One way to handle the conflict information in real application like sensor data fusion is to measure the uncertain degree before applying sensor data fusion11,13,59 But how to measure the uncertain degree of uncertain information in the framework of D-S theory is still an open issue.60–62 Shannon entropy is a typical way for uncertainty measure in the probabilistic framework. 17 Shannon entropy has been generalized to many fields, for example, as a generalization of Shannon entropy, network entropy is an effective measurement for testing the complexity of networks;63–66 however, Shannon entropy cannot be used directly among mass functions in the framework of D-S theory; this is because a mass function is the generalized probability assigned on the power set of the frame of discernment (FOD). To address this issue, many uncertainty measures in Dempster–Shafer framework are proposed, such as Höhle’s 67 confusion measure, Yager’s 68 dissonance measure, the weighted Hartley entropy, 69 Klir and Ramer’s 70 discord measure, Klir and Parviz’s 71 strife measure, George and Pal’s 72 conflict measure, and so on.60,61 However, the existed methods may not be that effective in some cases.73,74
Recently, based on Shannon entropy, Deng entropy is proposed to measure the uncertainty in mass functions. 73 Deng entropy can measure uncertain degree more efficiently than the other uncertain measures in some cases. Although Deng entropy had been successfully applied in some real applications, 75 Deng entropy did not take into consideration the scale of the FOD, which means a loss of available and valuable information in information processing. Thus, the improved belief entropy is proposed by Zhou et al.,74,76 which can process the uncertain information in the FOD and lead to a more accurate information modeling.
In order to address the uncertain information in multi-sensor, in the work by Fan and Zuo, 59 a fault diagnosis method based on multi-sensor reports is presented based on D-S theory, and the evidence sufficiency and evidence importance are defined to model the reliability of evidence. Later, the method in the work by Fan and Zuo 59 is improved with Deng entropy and evidence distance by Yuan et al., 13 which leads to a better fusion result for fault diagnosis. However, while modeling the sensor reliability, both Deng entropy and evidence distance are based on basic belief assignments (BBAs) in the work by Yuan et al., 13 and a coupling relation may exist in the proposed uncertainty measure. The same problem also exists in the works by Yuan et al. 11 and Wang et al. 75
In this article, based on the improved belief entropy, which can process more uncertain information than Deng entropy, a new uncertainty management approach for sensor data fusion is proposed. In the proposed method, first, the sensor report is modeled as the body of evidence (BOE) in Dempster–Shafer framework. Then, the uncertain degree of each BOE is measured based on a new uncertainty management method. The uncertainty measure of each BOE is based on the subjective uncertainty represented as the evidence sufficiency and evidence importance, and objective uncertainty measure is represented as the improved belief entropy. Third, the evidence is modified with the weight of each BOE. The relative weight of each BOE, which is measured with the proposed uncertainty management method in the previous step, is used to modify the BBA of BOEs. Fourth, evidence fusion of the modified evidence is based on Dempster’s rule of combination. Finally, the fusion result is used for real application.
The rest of this article is organized as follows. In section “Preliminaries,” the preliminaries are briefly introduced, including D-S theory, Deng entropy, and the improved belief entropy. In section “A new uncertainty measure–based sensor data fusion approach,” the new uncertainty measure–based sensor data fusion approach is proposed. In section “Application in sensor data fusion,” a case study on sensor data fusion for fault diagnosis is presented to show the efficiency of the new method. The conclusions are given in section “Conclusion.”
Preliminaries
In this section, some preliminaries are briefly introduced, including D-S theory, Shannon entropy, and some typical uncertainty measures in Dempster–Shafer framework.
Dempster–Shafer evidence theory
Let

A mass function

If
A BOE, also known as a basic probability assignment (BPA) or BBA, is represented by the focal sets and their associated mass value

where ℜ is a subset of the power set
A BBA

In D-S theory, two independent mass functions, denoted as

where

Deng entropy
Deng entropy is a generalization of Shannon entropy in Dempster–Shafer framework.
73
If the information is modeled in the framework of a probability theory, Deng entropy can be degenerated to Shannon entropy. Deng entropy, denoted as

where
Some properties of Deng entropy are also discussed in the work by Abelln, 77 which can contribute to a better understanding of this theory. For more details on Deng entropy, please refer to Deng 73 and Abelln. 77
The improved belief entropy
In Dempster–Shafer framework, the improved belief entropy is defined as follows 74

where
The exponential factor
Example 1
Consider a target identification problem; assume that two reliable sensors report the detection results independently. The results are represented by BOEs which are shown as follows


Recalling equation (7), the uncertainty measure with Deng entropy is shown as follows


The results calculated by Deng entropy are counterintuitive. Although the two BOEs have the same mass value, the FOD of the first BOE
With the improved belief entropy in equation (9), the uncertainty measure in Example 1 is calculated as follows


It can be concluded that Deng entropy cannot measure the different uncertain degree between these two BOEs in this case, while the improved belief entropy can effectively measure the difference by taking into consideration more available information of the BOE. According to Table 1, it is also safe to say that the first BOE
Calculation results in example 3.1.
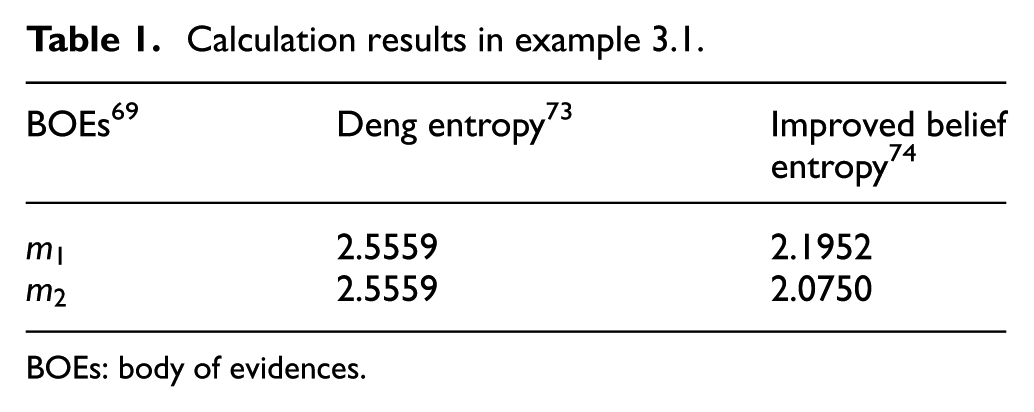
BOEs: body of evidences.
Some properties and the merit of the improved belief entropy, such as its compatibility with Shannon entropy, are briefly discussed in the work by Zhou et al.74,76 In addition, the improved belief entropy function can be used to measure the uncertainty of
A new uncertainty measure–based sensor data fusion approach
In this section, a new uncertainty measure–based sensor data fusion approach is proposed. The basic feature of the proposed method is the uncertainty management approach for sensor data fusion. The flow chart of the proposed methodology is shown in Figure 1. Five steps are included in the proposed methodology, which are shown as follows.
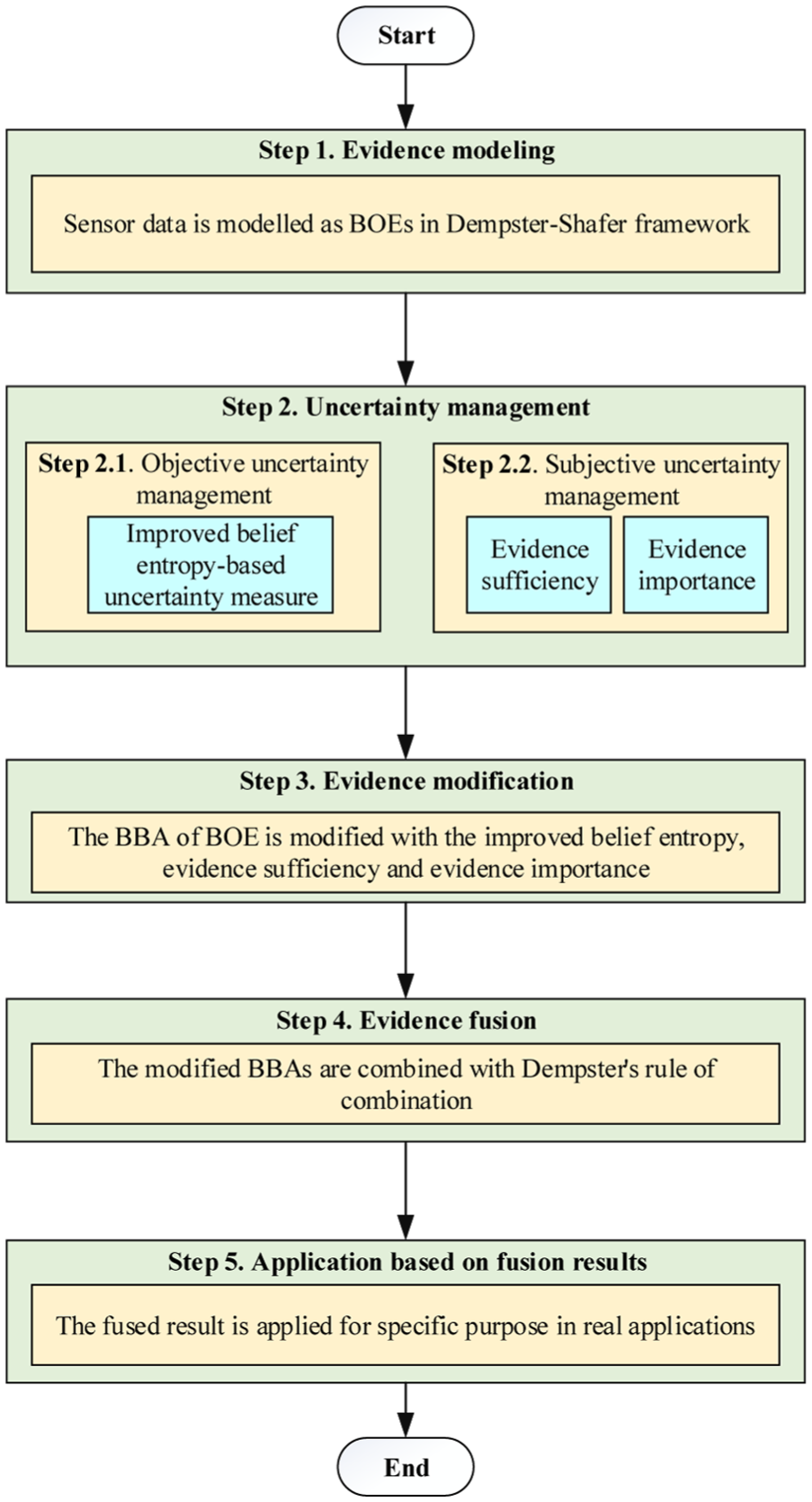
The flow chart of the uncertainty measure–based sensor data fusion approach.
Step 1: evidence modeling
Sensor data or other uncertain information is modeled as BOEs in Dempster–Shafer framework. Usually, the information is represented as BOEs; before further study, BBAs in BOE will be used to represent each tiny piece of evidence. Evidence modeling is another important open issue in D-S theory; for more details on this issue, please refer to Deng et al. 79 and Yang and Liu. 80
Step 2: uncertainty management
Uncertainty management of the uncertain information is necessary before data fusion or other application types. Uncertainty often comes from several types of uncertain and incomplete information, including ignorance and vagueness. In this article, the uncertainty of information is divided into two types: the objective uncertainty and the subjective uncertainty. The objective uncertainty comes from objective data, such as sensor data modeled in BBAs. In complicated real application environment, many reasons may affect sensor reports; sometimes, sensor data may be in high conflict with each other, thus the uncertain degree of sensor data is modeled as the objective uncertainty in the proposed methodology. The subjective uncertainty means information comes from subjective information, such as the subjective assessment of experts or personal experience of an engineer, which is modeled as evidence sufficiency and evidence importance in the work by Fan and Zuo. 59
The flow chat of the uncertainty management method, which is based on the improved belief entropy, the sufficiency index, and the importance index, is shown in Figure 2.
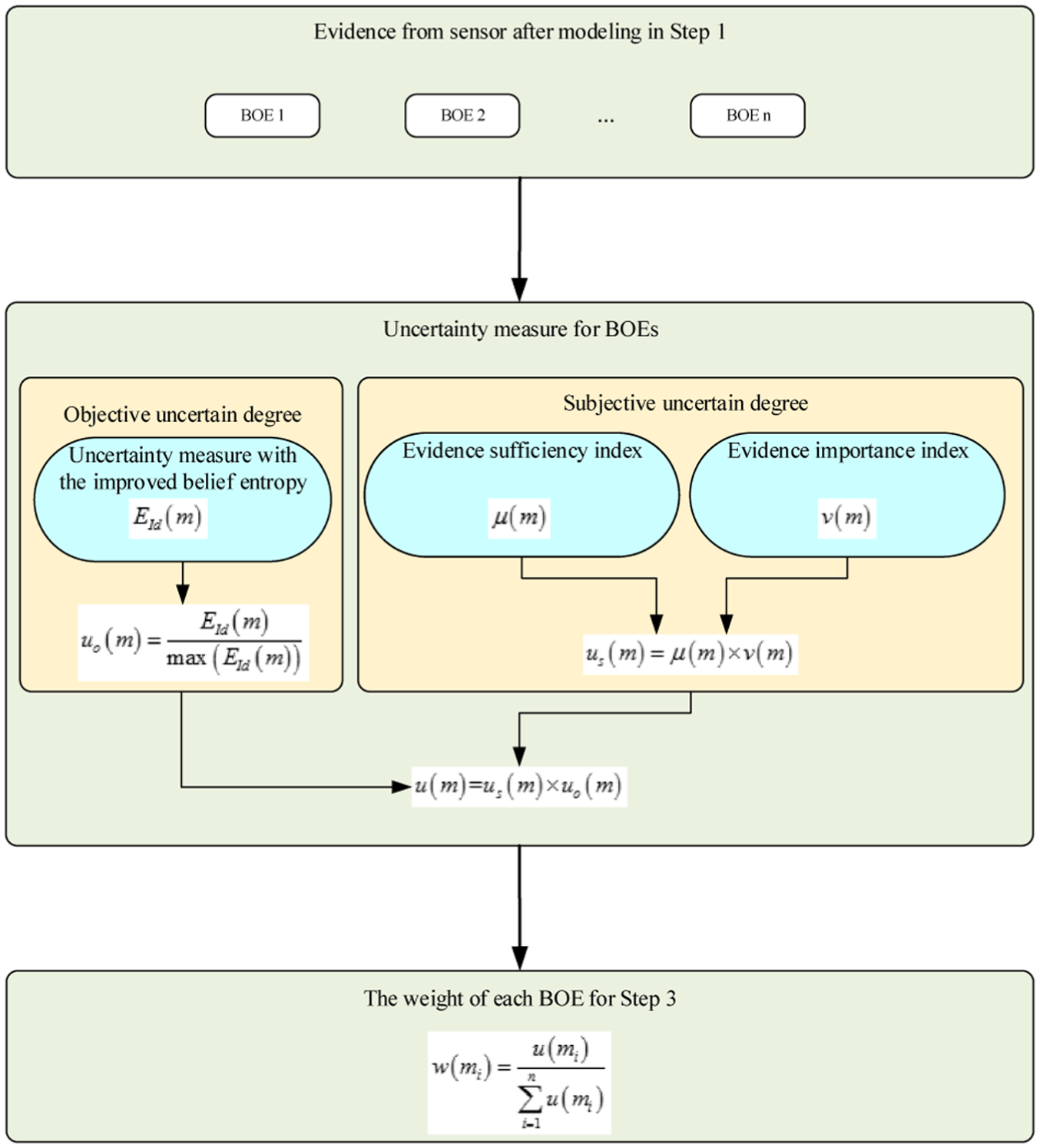
The flow chart of the proposed uncertainty management method.
The subjective uncertainty, denoted as

where
The objective uncertainty of each BOE is measured by the improved belief entropy. In the FOD, the objective uncertain degree is a relative value with respect to the highest uncertain degree among all the BOEs; thus, the objective uncertainty, denoted as

where
With equations (14) and (15), the total uncertainty measure of each evidence (BOE) is defined as follows

After normalization, the final relative weight of the

where
Step 3: evidence modification
Since conflict evidence may lead to counterintuitive results,58,57 evidence modification is a common method for uncertain data preprocessing.11,13,81,82 In this article, the evidence modification is based on the uncertainty management methodology. Each BOE will be modified with a weight based on the uncertainty management methods. In other words, the BBA of BOE is modified with a comprehensive weight based on the improved belief entropy, evidence sufficiency, and evidence importance.
For a proposition

where
Step 4: evidence fusion
After evidence modification, the modified BBAs now can be combined with Dempster’s rule of combination.
For a proposition

Step 5: application based on fusion results
The fused results can be applied for specific purpose in real applications, such as decision-making and target identification. Usually, the final result can be got accompany with a belief in terms of percentage; the higher the value, the more helpful it will be for real applications.
Application in sensor data fusion
In this section, the proposed sensor data fusion methodology is applied to the case study on sensor data fusion in the work by Fan and Zuo. 59
Problem description
Recall the example in the work by Fan and Zuo.
59
Three fault types are denoted as
BBAs in the fault diagnosis problem. 59

BBAs: basic belief assignments.
Based on the sensor reports in Table 2, which one is the fault that happens now,
Fused results with only Dempster’s rule of combination.
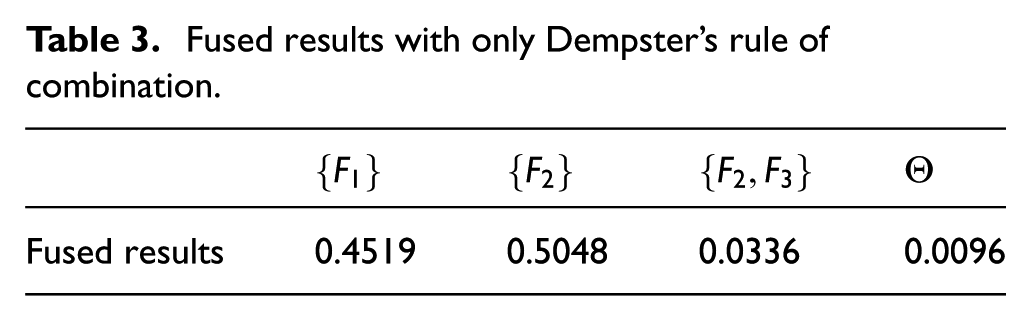
Sensor data fusion with the proposed method
Recall the proposed method in section “A new uncertainty measure–based sensor data fusion approach” to handle the problem in section “Problem description.”
Step 1: evidence modeling
Adopted from Fan and Zuo, 59 the sensor reports in the problem are modeled as three BOEs, and the BBAs are shown in Table 2.
Step 2: uncertainty management
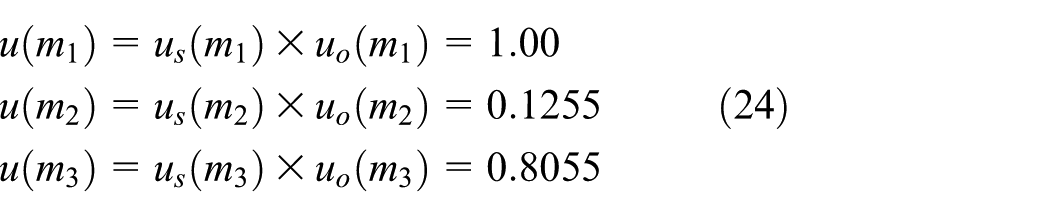
In the proposed method, the uncertainty management of evidence is modeled as the objective uncertainty and the subjective uncertainty. The subjective uncertainty

Parameters in the application adopted from Fan and Zuo. 59

BOE: body of evidence.
Before calculating the objective uncertain degree of the BOEs, the improved belief entropy of each BOE, according to equation (9), is calculated as follows

It is clear that

The objective uncertainty, according to equation (15) accompany with equation (22), is calculated as follows

where
With equation (16), accompanying with equations (20) and (23), the total uncertainty measure of each evidence (BOE) is calculated as follows
After uncertainty management, with equation (17), the weight for evidence modification of each BOE is calculated as follows

Step 3: evidence modification
Evidence modification is based on uncertain management in the previous step; with equations (18) and (25), the evidence in Table 2 is modified as follows
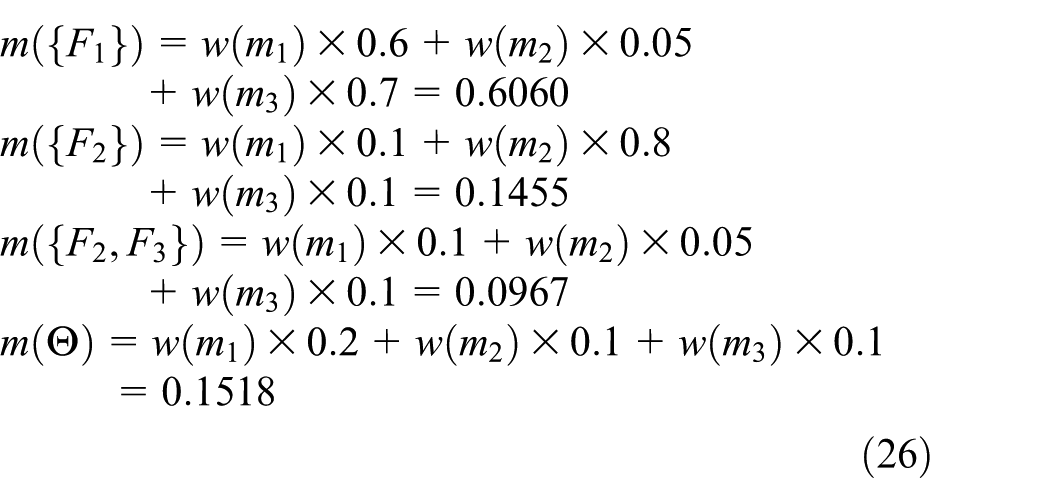
Step 4: evidence fusion
After evidence modification, the modified BBAs now can be combined with equation (19). Since there are three BOEs in total, the modified evidence will be fused with Dempster’s rule of combination by two times, and the combination result is shown as follows

The fusion result is presented in Table 5.
Fusion result with different methods.

Step 5: application based on fusion results
Based on the fused result, it can be concluded that
The case study demonstrates the effectiveness of the proposed uncertainty management approach.
Discussion
The fused results with the proposed uncertainty measure are compared with the method in the works by Tang et al. 12 and Fan and Zuo, 59 and the comparison result is shown in Table 5.
It can be concluded from Table 5 that the proposed method has the most distinguishable fusion result on sensor reports. The highest belief degree on fault type
Three reasons contribute to the effectiveness of the proposed uncertainty management–based sensor data fusion approach. First, the sensor data are preprocessed properly before applying the combination rules based on the subjective uncertainty management method and the proposed objective uncertainty management method. This is very important in sensor data fusion especially when there is conflict evidence. Second, the weights of BOEs are calculated based on a new belief entropy, which can address more uncertain information in BOE in comparison with the old belief entropy. Finally, the final fused rule is based on Dempster’s rule of combination. The merits of Dempster’s rule of combination, such as satisfying the commutativity and associativity, contribute to the rationality of the proposed method.
Conclusion
In this article, an improved belief entropy–based uncertainty management approach is proposed for sensor data fusion. The uncertain degree of sensor report modeled as BOE is measured based on an improved belief entropy. In addition, the importance index and the sufficiency index of evidence are also taken into consideration in the proposed method. After evidence modification with the proposed uncertainty measure method, the weighted BBAs are fused by Dempster’s rule of combination. Finally, decision-making in real applications is based on the conflict data fusion results. The rationality and merit of the proposed method are verified with a case study of fault diagnosis. The on going work of this article is applying the proposed sensor data fusion method to solve more industrial problems in real applications.
Footnotes
Appendix 1
Acknowledgements
The authors greatly appreciate the editor’s encouragement and the three anonymous reviewers’ constructive comments to improve this paper.
Academic Editor: Florentino Fdez-Riverola
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was partially sponsored by the National Natural Science Foundation of China (Grant No. 61671384), the Natural Science Basic Research Plan in Shaanxi Province of China (Grant No. 2016JM6018), the Aviation Science Foundation (Grant No. 20165553036), the Fund of Shanghai Aerospace Science and Technology (Grant No. SAST2016083), and the Innovation Foundation for Doctor Dissertation of Northwestern Polytechnical University (Grant No. CX201705).