
Abstract
Recently, vehicular ad hoc networks, which organize communications between vehicles and between vehicles and infrastructures, have played an important role in providing safe transportation and infotainment applications. To satisfy the various requirements of applications such as delay-bounded transmission of safety packets, a broad bandwidth of non-safety packets, known as medium access control has been developed. In addition, to cope with the frequent topology changes of vehicular ad hoc networks, adaptive IEEE 802.11p–based multi-channel medium access control protocols have been proposed, which can adapt to different traffic conditions. In this article, we focus on such protocols and classify them according to interval division methods. Here, we perform comparisons between these protocols following three main categories: the fixed safety transmission interval, safety and Wireless Access in Vehicular Environment Service Advertisement/Acknowledgment transmission interval, and safety and Wireless Access in Vehicular Environment Service Advertisement transmission interval. We performed simulations in NS-3 under the assumption of saturated throughput for Wireless Access in Vehicular Environment Service Advertisement packets and a Poisson arrival process for the safety packets. From the simulation results, it is evident that the design of a new multi-channel medium access control protocol based on IEEE 802.11p needs to balance the trade-off between transmission delay and packet delivery ratio to be efficient, reliable and adaptive. Moreover, such a medium access control protocol can provide efficient vehicle-to-vehicle and vehicle-to-infrastructure communications, which affect the stability of the vehicular cloud.
Keywords
Introduction
According to the World Health Organization, the number of deaths in traffic accidents worldwide annually is 100 million, which accounts for an economic loss of 500 billion. 1 Vehicular ad hoc networks (VANETs) are a part of the Intelligent Transportation System (ITS), which aims to enhance vehicular safety, reduce traffic accidents, and improve transportation efficiency. VANETs consist of vehicles that use wireless communication equipment, that is, On-Board Units (OBUs), enabling them to connect with other vehicles, and Road Side Units (RSUs), which are positioned along the road. Therefore, VANETs perform two types of communications: vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I). Based on these communications, VANETs classify applications into mainly three categories:2,3 (1) safety-related applications (e.g. emergency brakes, collision avoidance, and automatic notification of crashes on roads); (2) transport efficiency applications (e.g. intersection management and navigation and lane merging assistance); and (3) infotainment applications (e.g. voice over IP, video, web browsing, and mobile multiplayer gaming). Non-safety applications are defined as representing transport efficiency and infotainment applications. Note that safety and non-safety applications have various requirements, such as a short delay constraint and wide bandwidth, as shown in Table 1.
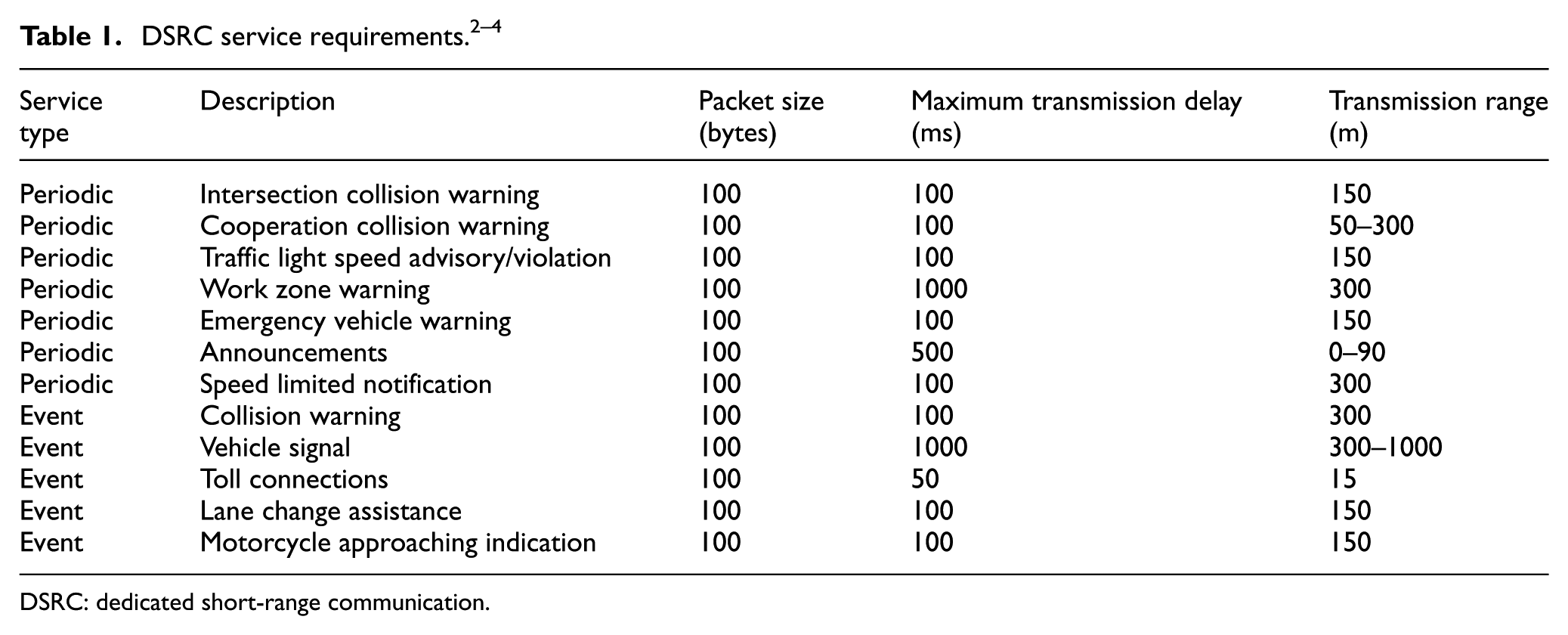
DSRC: dedicated short-range communication.
Recently, modern vehicles are expected to carry relatively more communication systems, on-board computing facilities, storage, and increased sensing power. 5 However, there is an increasing need for resources, in particular, for safety applications that require cooperation between vehicles. The vehicular cloud offers to users the opportunity to rent resources on-demand or to share them freely to run their applications or to carry out some tasks. 6 The vehicular cloud is used to improve safety, increase efficiency, and help the economy. 7 Moreover, the vehicular cloud can dynamically adapt according to changing application requirements and system environments. In contrast, in VANETs, safety packets require strict reliability and timeliness requirements; when a vehicle is performing certain actions, such as changing direction dramatically or driving over the speed limit, emergency warning messages (EWMs) will be generated and sent to the cloud storage and surrounding vehicles on the road. 5 In addition, many schemes 8 proposed for VANETs can increase the throughput for non-safety packets and alleviate the congestion of some channels. By comparing the requirements of VANET applications and benefit of the vehicular cloud, the need for a medium access control (MAC) protocol which provides efficient transmission delay and the use of rationalized radio resources 5 is crucial for VANETs.
MAC is designed to meet the requirements of safety and non-safety applications. It provides an efficient broadcast service and shares this with different vehicles in an efficient and fair manner. Various MAC protocols have been proposed for VANETs that improve the throughput for non-safety applications and support the reliability of safety applications. In general, MAC protocols are separated into three categories: contention-based, contention-free, and hybrid MAC protocols.8–11 In contention-based MAC protocols, if vehicles have data to transmit, they will access the channel using a carrier sensing mechanism. 12 However, a data packet collision occurs at the destination vehicle when neighboring vehicles sense that the channel is free and simultaneously transmit their data. In addition, contention-based MAC protocols allow each vehicle to attempt to transmit across the channel without any collisions. 9 In real-time applications, such protocols increase the packet loss ratio and access delay. The second category is contention-free MAC protocols, which prevent collisions by allowing only one vehicle in a neighborhood to access the channel at any given time. Hence, they allow for periodic transmission of control messages. However, all vehicles are required to store the schedule table and time synchronization. Finally, hybrid MAC protocols have tried to combine contention-based and contention-free methods into a single mechanism to increase the quality of service (QoS) and system throughput.
However, one of the issues among VANETs is that the high mobility and rapid changes in the topology cause frequent network disconnections and link failures. It is necessary to design MAC protocols that adapt to different traffic conditions, such as vehicle density and traffic data. Time-division multiple access (TDMA)-based MAC protocols, such as those in previous works,13–25 support an efficient channel utilization, reliable communication, and deterministic access times, even with a large traffic load and QoS requirements. In contrast, contention-based MAC protocols10,26–29 allow vehicles that wish to transfer data to randomly attempt accessing the channel. As the network load increases, the transmission collision also increases. These protocols are primarily used for safety-critical situations. In recent years, hybrid MAC protocols30–33 have been designed to increase the QoS and system throughput.
The IEEE 802.11p 26 standard, which is based on the legacy IEEE 802.11 standard, is a recently proposed MAC standard for VANETs 18 and is widely implemented. To support multi-channel access for a single-radio transceiver in IEEE 802.11p, IEEE 1609.4 34 was developed for Wireless Access in Vehicular Environments (WAVE), as shown in Table 2. IEEE 1609.4 employs an alternate access scheme, which allows a vehicle to switch between the control channel (CCH) and service channels (SCHs) every 50 ms. In this article, we focus on multi-channel MAC protocols based on the latest drafts of the IEEE 802.11p and IEEE 1609.4 standards with a single radio transceiver. Alternatively, adaptive IEEE 802.11p–based multi-channel MAC protocols are proposed to adapt to both vehicle density and traffic data conditions. These adaptive IEEE 802.11p multi-channel MAC protocols primarily use information (the delay/ throughput performance) from Markov chains modeling. In this article, we study the main contributions of the proposed adaptive IEEE 802.11p–based multi-channel MAC protocols via their classifications using interval division methods. We perform simulations by using NS-3 35 and compare these protocols in terms of the packet delivery ratio of safety applications and non-safety applications. Finally, we conclude and discuss some issues in designing adaptive IEEE 802.11p–based multi-channel MAC protocols.

VANET: vehicular ad hoc network; WAVE: Wireless Access in Vehicular Environment; MAC: medium access control; OBU: On-Board Unit.
In this article, we study the main contributions of the proposed adaptive IEEE 802.11p–based multi-channel MAC protocols via their classifications using interval division methods. We perform simulations by using NS-335 and compare these protocols in terms of the packet delivery ratio of safety applications and non-safety applications. Finally, we conclude and discuss some issues in designing adaptive IEEE 802.11p–based multi-channel MAC protocols.
Comparison of interval division method of adaptive IEEE 802.11p–based multi-channel MAC protocols
The main challenge of designing MAC protocols for VANETs is achieving reliable delivery of messages within a given time limit, even when the density of vehicles greatly and rapidly varies in the network, 38 that is, the variance of the vehicle density is large and fast. One approach is using MAC protocols to adjust the intervals according to vehicle density or traffic data. By leveraging information from Markov chains, 8 adaptive IEEE 802.11p–based multi-channel MAC protocols can dynamically change intervals. According to Nguyen et al., 8 there are two different Markov chain models for safety and WAVE Service Advertisement (WSA) packets. If a vehicle has a non-safety packet, it broadcasts a WSA packet and piggybacks off the service information, eventually identifying the SCHs to be used. If a receiver agrees with the information sent by the sender, it responds to the WSA packet with an acknowledgment (ACK). In contrast, safety messages have their own special properties: bounded delay and no positive ACK. Therefore, researchers have proposed many schemes that apply Markov chain models for either safety or WSA transmission to compute the optimized intervals in MAC protocols.
According to the frameworks of control channel intervals (CCHIs), we classified adaptive IEEE 802.11p–based multi-channel MAC protocols into three main categories: the fixed safety transmission interval, safety and WSA/ACK transmission interval, and safety and WSA transmission interval, as shown in Figure 1. For the fixed safety transmission interval methods, we classify them using Markov chain models: (a) the WSA/ACK transmission interval10,29,39 and (b) the WSA transmission interval with a fixed ACK transmission interval. 40 The APDM 41 uses both the safety and WSA/ACK transmission intervals method. By separating ACK into independent intervals, APDM 41 divides the WSA/ACK transmissions into two intervals: a WSA transmission interval and an ACK interval. FCM-MAC 42 is split into WSA transmissions and RSU broadcast Reservation (RES) messages, which contain the SCH assignment and scheduling order for each link of service data transmission.
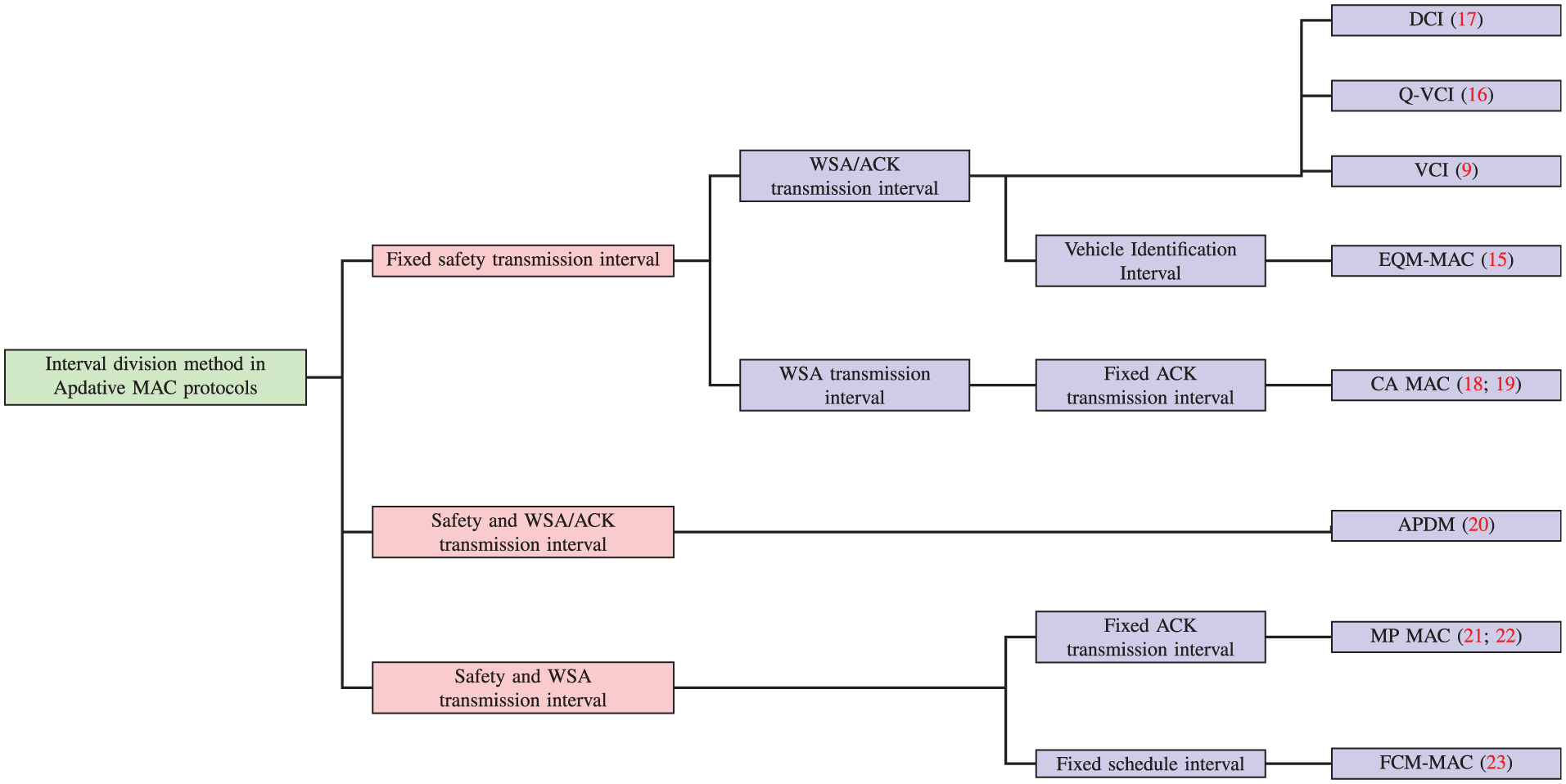
Classification of adaptive MAC protocols according to interval division methods.
Bianchi et al. 43 presented a Markov chain model to compute the saturation throughput performance of the 802.11 Distributed Coordination Function (DCF). (All nodes providing service always have available WSA packets.) Based on this model, VCI 10 is enhanced by considering the frozen backoff timer and holding the maximal backoff stage. In VCI, CCHI is split into two intervals: a safety interval and a WSA/ACK interval. However, VCI cannot avoid interference from hidden nodes. EQM-MAC 40 is extended from VCI, which considers the number of vehicles in the RSU’s coverage. EQM-MAC divides the CCHI into three intervals: a safety interval, a vehicle identification interval, and a WSA/ACK interval (Song et al. 40 define this interval as a contention-free interval). To improve the throughput for non-safety applications, CA MAC44,45 divides the WSA/ACK interval in VCI 10 into two independent intervals: the WSA and ACK intervals. However, fixed safety interval methods10,40,44,45 have a disadvantage in that the safety packet that arrives in the WSA interval has to wait for the next safety interval to broadcast the safety packets.
To improve the reliability of safety transmission, the safety and WSA/ACK transmissions are transmitted together in the same interval in APDM. 41 APDM divides the CCHI into two intervals: the multi-priority (MP) broadcast interval, which is used to broadcast the optimal ratio packet (ORP), and the random contention interval. MP MAC46,47 divides the WSA/ACK interval in VCI 10 into two independent intervals: the WSA interval and the ACK interval. One fixed interval is used to broadcast an MP-supported p-persistent (MP) packet (which is a fixed interval), and the other interval is used to dynamically adjust the broadcast safety and WSA packet. Alternatively, based on RSU, FCM-MAC 42 proposes a fixed interval for broadcasting an RES packet in exchange for a fixed ACK interval in MP MAC.46,47 All operations of the existing adaptive IEEE 802.11p–based multi-channel MAC protocols are shown in Figure 2.

Operation of existing adaptive IEEE 802.11p–based multi-channel MAC protocols.
In Table 3, we discuss the advantages and disadvantages of adaptive IEEE 802.11p–based multi-channel MAC protocols. Although these protocols use different interval division methods, their advantages are summarized as follows:
Improve the saturated throughput;
Adapt to the amount of traffic data;
Ensure safety packet transmission;
High channel utilization.
Different adaptive IEEE 802.11p–based multi-channel MAC protocols.

MAC: medium access control; VANET: vehicular ad hoc network; WSA/ACK: Wireless Access in Vehicular Environment Service Advertisement/Acknowledgment; SCHI: service channel interval; QoS: quality of service; CCH: control channel; RES: Reservation; ORP: optimal ratio packet.
Their disadvantages are summarized as follows:
Not suitable for multi-hop communication because each control vehicle (RSUs or Cluster Heads (CHs)) computes the optimized interval among its one-hop neighbor.
The channel access schedule is lost and collision between messages will occur when CHs move out of their clusters.
In order to compare adaptive IEEE 802.11p–based multi-channel MAC protocols, we will discuss the simulation results in the next section.
Performance evaluation
In this section, we discuss the simulation results of three main categories: the fixed safety transmission interval, safety and WSA/ACK transmission interval, and safety and WSA transmission interval division methods. Let VCI 10 and CA MAC44,45 represent two fixed safety transmission interval division methods, APDM41 represent safety and WSA/ACK transmission interval division methods, and MP MAC46,47 represent safety and WSA transmission interval division methods with fixed ACK intervals.
The MAC protocols performance is based on the density of vehicles.8,48 Therefore, we simulate and compare the operations of different existing MAC protocols under different vehicle densities. We assume that the simulated highway segment consists of one RSU and vehicles that are placed on a straight line according to a Poisson point process with network density
The performance of different MAC protocols is carried out by NS-3. The parameter configurations are summarized in Table 4. The sending frequency of safety packets
System parameters for simulations.

SCHs: service channel; CCH: control channel; ACK: acknowledgment; WSA: Wireless Access in Vehicular Environment Service Advertisement; DIFS: distributed coordination function (DCF) inter-frame space; SIFS: short inter-frame space.
In VCI and CA MAC, CCHI consists of a fixed safety interval, while MP MAC has a fixed ACK interval. Now, we present formulas to compute these intervals.
A fixed safety interval. The length of a safety interval, defined as

where N presents the total number of nodes sending safety packets,
A fixed ACK interval. The length of an ACK interval, defined as

where

Compared with VCI, 10 CA MAC,44,45 and APDM, 41 MP MAC46,47 can support the reliable transmission of safety packets via ACK schemes. In MP MAC, the operation of the reliability of safety packets is as follows:
If a node hears a safety packet, it will reply to the ACK packet during the ACK interval.
If a node hears an ACK packet responding to the same safety packet, it will not repeat the response.
Safety packets require a short delay constraint and efficient broadcast. Hence, we compare two parameters: (1) transmission delay (D) and (2) packet delivery ratio (

where

In Figure 3, we discuss the transmission delays of packets #1 and #2 in the case of using VCI, CA MAC, and MP MAC. We assume packet #1 has experienced a collision; hence, this packet must wait until the next safety interval of the Synchronization Interval (SI). Since packet #2 arrives at the same time as the service channel interval (SCHI), both VCI and CA MAC skip this packet and head toward the next safety interval of the next SI to broadcast SI. In contrast, the MP MAC and CA MAC allow packet #2 to be broadcast when a corresponding vehicle attempts to successfully access the channel, as shown in Figure 3. To fairly compare VCI, CA MAC, and MP MAC, we consider the role of an RSU and define the following rules:
Rule 1. If an RSU successfully receives safety packets, it will broadcast the corresponding vehicle sender’s ID by including it in the control packets.
Rule 2. If the vehicle senders overhear their IDs in the control packet broadcast by the RSU, the vehicle senders successfully broadcast safety packets. Otherwise, the vehicle senders will attempt to access a channel and broadcast their packets again until they are successfully broadcast.
Rule 3 (Saturated throughput condition). In VCI, CA MAC, and MP MAC, an optimized interval is calculated based on the saturated throughput. Therefore, we assume that all vehicles always have a non-safety packet to exchange. In addition, we assume that the generated safety packets that arrive at the MAC queues follow Poisson distributions.

An example of transmission delay of safety packets.
First, we compare these methods under a low-density scenario with

Low-density scenario
Second, we consider an average density scenario with

Average density scenario
Finally, we consider a high vehicular density scenario with

High-density scenario
Conclusion and future works
In this article, we discuss interval division methods in adaptive IEEE 802.11p–based multi-channel MAC protocols. First, we classify the existing adaptive IEEE 802.11p–based multi-channel MAC protocols into three main categories: fixed safety transmission intervals, safety and WSA/ACK transmission intervals, and safety and WSA transmission intervals. Second, we evaluate and compare these protocols under the same conditions. The simulation results are carried out using NS-3 under the assumptions of saturated throughput for WSA packets and safety packets following Poisson point processes. Under saturated throughput, the simulation results demonstrate the following: (1) VCI and CA MAC cannot support reliability for safety packets that have collided; (2) protocols using a separated ACK interval (CA MAC and MP MAC) have a lower packet delivery ratio of safety packets and WSA packets compare to not using a separated ACK interval (VCI and APDM); (3) VCI supports efficient broadcast of safety packets and the PDR of the WSA packets; and (4) APDM and MP MAC satisfy a short delay constraint for safety packets. Future adaptive IEEE 802.11p–based multi-channel MAC protocols should consider the trade-off between transmission delay and PDR to improve their efficiency, reliability, and adaptability.
Footnotes
Handling Editor: Geng Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Institute for Information & Communications Technology Promotion (IITP) grant funded by the Korea government (MSIT) (No. 2017-0-00294, Service mobility support distributed cloud technology). This research was also supported by the MSIT (Ministry of Science and ICT), Korea, under the ITRC (Information Technology Research Center) support program (IITP-2018-2013-1-00717) supervised by the IITP (Institute for Information & communications Technology Promotion).