
Abstract
In recent years, the increase in vehicular traffic has led to a drastic increase in road accidents, thus requiring adequate vehicle safety measures. The intelligent transportation system is a branch of modern technology responsible for delivering such road safety services. The wireless access vehicular environment standard defines how these intelligent transportation system applications can be incorporated in highly varying vehicular ad hoc network environments. Wireless access vehicular environment comprises the IEEE 802.11p and IEEE 1609.4 standards responsible for handling medium access control and transmission mechanisms in vehicular ad hoc networks. However, these standards still face medium access control and physical layer challenges, which must be addressed for reliable quality of service. Several research studies have been proposed and are still underway into improving medium access control protocols in the wireless access vehicular environment stack model defined by IEEE 1609.4 multichannel operation. These proposed medium access control protocols refine the quality of service and reliability of certain performance parameters and have also added some limitations. The working of such wireless access vehicular environment medium access control protocols can be enhanced by defining their limitations and improving them, without causing any performance tradeoffs. Finally, this article works toward reviewing and analyzing such limitations and tradeoffs to provide insight into possible improvements for future medium access control research deployments.
Keywords
Introduction
Vehicular ad hoc networks (VANETs) are a paradigm contemplating the issues of safe driving and proper traffic management and synchronization. They are wireless communication networks that translate the role of wireless fidelity into a wireless intelligent transportation system (ITS) network. 1 The VANET environment consists of on-board units (OBUs) and roadside units (RSUs). OBUs are embedded electronic systems in vehicles, whereas RSUs are stationed on the roadsides and exchange data with OBUs (vehicles). These OBUs and RSUs are responsible for vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications in VANETs. 2 The communication range of each node in a typical VANET environment is around 1 km. Also, a VANET supports V2V and V2I communications with a relative velocity of up to 200 km/h. 3 The main services provided by vehicular networks are primarily safety, commercial, convenience, and productive applications 4 or infotainment. The services provided by VANETs in V2V and V2I communications are mainly divided into two metrics: random event-driven emergencies and periodic infotainment services. 5 Going into further detail, a VANET is utilized for its vehicular safety applications such as collision warnings and infotainment services such as video calling, email, and other multimedia-related services. Numerous industries show interest in making their vehicles more safe and luxurious and are more driven to invest in such technology. 6 The quality-of-service (QoS) requirements of these ITS services in VANETs are supported by the wireless access vehicular environment (WAVE) 7 standard, also referred to as IEEE 802.11p. 8 WAVE/IEEE 802.11p is basically an amendment to IEEE 802.11 8 to support communications between vehicles in a highly mobile VANET mode.
WAVE QoS requirements differ for safety and non-safety services. Safety services are mainly associated with emergency packet broadcasts and are highly delay sensitive, with higher QoS requirements. Meanwhile, non-safety applications can handle some delay, but are very throughput sensitive.9–12 Unlike a regular mobile ad hoc network scenario, which is the basic infrastructure of VANETs, the communicating nodes (vehicles) in VANETs are very mobile. Moreover, nodes in VANETs have a limited range for communications, with drastically varying topologies, and the comparatively unstable environment13–19 makes it a rather inconsistent network. VANETs work in dedicated short-range communication (DSRC) mode. DSRC obeys orthogonal frequency-division multiplexing (OFDM) to direct the emergency- and infotainment-related data into seven channels. Each channel exhibits 10 MHz of bandwidth within 5.9 GHz of spectrum, supporting data rates of up to 27 Mbps. This operation of utilizing multiple channels for data delivery is defined under multichannel medium access control (MAC) operation of the IEEE 1609.4 standard in WAVE. 20 However, IEEE 1609.4 standard in WAVE exhibits numerous QoS-related limitations which are discussed in detail in section “MAC in WAVE.” These constraints limit the IEEE 1609.4 multichannel medium access control (MCMAC) scheme for the use in VANETs and are mainly contributed by the random mobility nature of WAVE. Numerous multichannel operational WAVE MAC protocols21–24 are proposed to address these issues in VANETs. These MAC protocols will be discussed in forthcoming sections. In this article, we provide detailed summary and critically analyze these multichannel operational MAC protocols on the basis of their proposed work, system model, QoS delivery, and limitations. The main contribution of this article is to review the QoS provision of safety and non-safety applications in VANETs considering MCMAC approach. We also discuss the limitations of current and previously proposed MCMAC schemes for the following purposes: recognition of QoS requirements for delay-bounded safety broadcasts, and higher non-safety packet throughput performance. This article discusses in section “IEEE standards and mechanisms for WAVE” the various standardizations and the corresponding management-level functions under the WAVE scenario. Section “IEEE standards and mechanisms for WAVE” discusses limitations and prerequisites of WAVE and related multichannel standards for efficient MAC protocol modeling. Section “Related work” provides an insight into the related work. Section “Proposed Multichannel-operational MAC Protocols in WAVE and related issues” introduces and summarizes the limitations of multichannel operational VANET MAC protocols. Finally, section “Conclusion” concludes the article.
IEEE standards and mechanisms for WAVE
This section describes the updated IEEE WAVE-related standards and mechanisms, such as the enhanced distributed coordination access function (EDCAF). Figure 1 defines the workings of WAVE network devices according to the multiple vehicular standards, which include upper MAC (IEEE 1609.4), lower MAC (IEEE 802.11p MAC), the WAVE physical layer (PHY), and so on. WAVE umbrellas all these standards and defines the processing of each one of them and their dependability on each other.

WAVE protocol stack.
DSRC
In 1999, the United States Federal Communications Commission allocated 75 MHz of spectrum from the 5.9 GHz band to be utilized by ITS. 25 The regulatory requirements of DSRC standard in several world regions are in process of being finalized. Other DSRC frequency bands that were used before 5.9 GHz band are defined in Table 1. 26 It is evident that the allotted number of channels for the United States is 7 and is considered to be the scope of ITS. For the purpose of global inter-operability and efficient costs, a common spectrum allocation worldwide might be adopted in future DSRC technology. 27 Figure 2 depicts the 5.9 GHz DSRC spectrum constituting six service channels (SCHs) and one control channel (CCH), each with 10 MHz of bandwidth. The services provided in VANETs fall into two categories, namely, safety and non-safety services. The DSRC standard dedicates a single CCH for safety and other multichannel service announcements. Six SCHs are responsible for non-safety/infotainment service–related transmissions (e.g. video calling). A VANET supports a range of communication (ROC) of up to 1 km, with 300 m being widely considered. Figure 1 represents the DSRC and IEEE 802.11p 28 considerations under MAC and PHY specifications for WAVE.
DSRC/WAVE parameters.

DSRC: dedicated short-range communication; WAVE: wireless access vehicular environment; RSU: roadside unit; OBU: on-board unit.

DSRC spectrum channel assignment.
IEEE 802.11p standard
Over the years, IEEE has evolved to develop new standards and protocols and making amendments to them. One such standard is IEEE 802.11p. It operates on a DSRC frequency band that is considered the future of ITSs, mainly due to its low message latency.25,29 IEEE 802.11p is an incentive model for development of numerous VANET-based protocols. The distributed layered structure mainly constitutes IEEE 802.11p PHY and IEEE 802.11p MAC (WAVE lower MAC), as shown in Figure 1.
WAVE/IEEE 802.11p PHY
The WAVE PHY adopts OFDM IEEE 802.11a 30 for broadcasting services. However, due to the entirely different environment from IEEE 802.11a, WAVE possesses high mobility and constantly changing channel conditions. Considering this, DSRC adopts a reduced bandwidth of 10 MHz instead of a 20 MHz under IEEE 802.11a. 31 The reason DSRC is not considering a 20-MHz channel width is significant worsening of intersymbol interference caused by the gradual increase in node mobility. Furthermore, DSRC opts for a moderately higher operational frequency, spanning 5.855–5.925 GHz, rather than the standard IEEE 802.11a, which ranges between 5.170 and 5.230 GHz. In addition, separate and exclusive 5.855–5.925 GHz frequency band by DSRC for ITSs also limits the interferences from other ad hoc wireless network devices.
IEEE 802.11p MAC/WAVE lower MAC layer
IEEE 802.11p adopts the enhanced distributed channel access (EDCA) scheme from IEEE 802.11e.
32
EDCA is defined by the MAC layer management entity (MLME) in WAVE protocol stack and follows priority-based distribution of data packets into four access category (AC) queues for QoS management. Figure 3 represents the operation of four access categories contending for channel access: voice traffic (VO), video traffic (VI), best-effort (BE) traffic, and background (BK) traffic, each coordinated by an independent EDCAF. Each AC follows the necessary EDCA parameters, such as minimum contention window


EDCA mechanism of the four ACs.
The ACs flow data packets into a first-in first-out (FIFO) queue followed by the EDCA-based contention process during the given
IEEE 1609.4/WAVE upper MAC layer
Safety and non-safety services are the staple of information exchanged in the IEEE 802.11p scenario. Figure 4 describes the IEEE 1609.4 DSRC multichannel operation strategy to coordinate these safety and non-safety services over a single CCH and the six SCHs. In addition, the CCH and the six SCHs operate during subsequent alternating CCH and SCH intervals (50 ms). Henceforth, a control channel interval (CCHI) is exclusively utilized by the nodes to broadcast and listen to safety messages on CCH. Alternatively, non-safety packets are transmitted and received on the six SCHs during service channel interval (SCHI). Elaborating to the functionality of alternating channel intervals in IEEE 1609.4, each node tunes to CCH during CCHI to listen to any safety message broadcasts and exchange WAVE service announcement (WSA) messages to negotiate SCH. During the SCH interval, each pair of node can switch to a negotiated SCH to perform non-safety data exchange. A combined pair of CCHI and SCHI is referred as a 100 ms synchronous interval. 33 With the beginning of each channel interval, a radio device is allotted 4 ms of channel switching time, defined as a guard interval, when no broadcast takes place. The guard interval ensures that the beginning of each and every time interval is well synchronized among the entire common channel–switching radio devices. For vehicles to avoid any possible communication delays or losses, IEEE 1609.4 employs a global positioning system (GPS) to synchronize the nodes with universal time coordination (UTC) system.

IEEE 1609.4 DSRC multichannel operation.
MAC in WAVE
The mobility aspect of WAVE sets it apart from other wireless ad hoc environments having comparatively stable nodes. Infrastructure-based communications can add reliability and fairness to VANET communications, but constant usage of such services is very expensive 34 under WAVE. Thus, envisioning a fully dedicated WAVE-based on ad hoc networking mode is rather more convenient. Adapting to this, WAVE MAC follows the IEEE 802.11p carrier sense multiple access with collision avoidance (CSMA/CA) ad hoc MAC-based approach to limit collisions and interferences caused by the varying dynamicity and topology of vehicles in a network. However, IEEE 802.11p/WAVE is not able to fully overcome certain MAC layer–related limitations, discussed in detail next.
Dynamic environment. The standard ad hoc networking mode of VANETs possesses significant and unwanted delays and interferences due to the constant dynamicity of the vehicles. Dynamicity in VANETs imparts substantial instability to a WAVE topology, which constantly varies with time. Instability contributes to the subsequent signal losses and attenuation experienced by the nodes during transmission/reception. To improve WAVE MAC design reliability, it is mandatory to take the dynamicity of VANETs into consideration. 35
Hidden/exposed node problems. The hidden node 31 problem describes a scenario where two vehicular nodes are each absent from the other’s coverage range. 36 Being unaware of each other’s presence, these nodes initiate communications contending for the same time slot, resulting in channel-access collision. The exposed node problem explains a scenario where a transmitting node is exposed to the transmission of another node. This problem occurs only when both of the transmitting nodes fall within each other’s ROC.
Adaptability/scalability. Nodal density and adaptability in a particular WAVE environment play a vital role in the functioning of a MAC protocol.37,38 The WAVE environment has a wide scale of application scenarios, spanning urban to rural and crowded city buildings to less-crowded highways. The MAC design must efficiently adapt to such populations.
QoS requirements. The quality-of-service requirements for safety and non-safety messages differ on the basis of delay and throughput sensitivity, respectively. 39 Urgent broadcast/reception defines the low-delay sensitivity requirement of safety messages. Non-safety services are not time-restricted or delay sensitive, but rather require higher throughput delivery/reception. Hence, a WAVE MAC protocol must be able to accommodate varying QoS requirements.
Time synchronization. Time-division multiple access (TDMA)-based protocols trigger the nodes to communicate in allotted time frames. It is mandatory that they are tightly time synchronized. Usually, modern vehicles are equipped with GPS services, which initiate a one-pulse-per-second signal to synchronize all nodes at the start of every frame.
IEEE 1609.4 multichannel operation. The operation mode in WAVE describes the ad hoc networking scheme. In standard ad hoc networking, the density of receiving or transmitting nodes varies slowly. Thus, single-channel operation is a viable option, with insignificant attenuation and losses. However, the density of traffic nodes in WAVE varies at higher rates. There are instances where the higher traffic density cannot be handled by a single channel, which causes notable collisions and signal losses. Adapting to such a highly dynamic environment, the ad hoc mode will require additional channels to stream data efficiently to meet all specific QoS requirements. The use of these additional channels under WAVE is defined by IEEE 1609.4 multichannel operation. Some MAC protocols in WAVE are still limited to the use of single-channel operation, and simultaneous operation on all seven channels is an open issue that can be addressed to optimize multichannel coordination and provide enough time for services.
Pre-transmission channel status. Even after selecting a particular SCH for transmission, there is no such parameter to determine the congestion status of all SCHs under IEEE 1609.4. However, in a centralized configuration, there is no requirement to calculate the channel’s busyness or idleness, as nodes are centrally coordinated.
Bandwidth constraints. The ability of a particular node to transmit safety packets during a CCH interval is suppressed due to the non-availability of adequate allotted time. Although a 50-ms CCH channel (10 MHz) is available for safety and coordination broadcasts, research studies show that it may require a whole 100 ms synchronous interval to complete them. 15
Collisions due to CCH congestion. The nodes can potentially miss WAVE service advertisements due to the possible collisions on the CCH, which means the whole synchronous interval is impaired.
Interference and losses. Simultaneous working of any adjacent channels may cause a lot of interference, also delaying transmission opportunities. 27
Related work
MAC approaches are distinguished on the basis of contention-free or contention-based channel access. Contention-based protocols, such as IEEE 802.11p, depend on carrier sense multiple access (CSMA) and EDCA to work, whereas contention-free schemes like TDMA, frequency-division multiple access (FDMA), code-division multiple access (CDMA), or space-division multiple access (SDMA) adopt time, frequency, code, or slot allocation techniques. TDMA allots a respective time slot to each node trying to transmit/receive information over a given DSRC channel. However, maintaining a tight time synchronization constraint can cause problems in TDMA-based protocols. Moreover, underutilization of bands is another limitation with TDMA-based MAC protocols. Assuming an upper limit to a VANET’s ROC, that is, 1 km, two mobile nodes are not able to communicate for more than 30 s. Thus, the need for a highly reliant WAVE MAC protocol is an open issue. It is perceivable that contention-based MAC performs better in low traffic volumes due to low channel congestion; meanwhile, contention-free MAC delivers packets with higher throughput in high-traffic densities. Based on the possibility of the existence of MAC approaches in VANETs, factors such as high nodal density, dynamic VANET environments, tight time synchronization, and limited bandwidth resources must be taken into consideration before designing a contention-free MAC protocol for VANETs. Unlike TDMA MAC schemes, the contention-based scheme in IEEE 802.11p for WAVE is not constrained by tight time synchronization. It can comparatively adapt to the dynamicity of vehicles. Also, more than the required information overhead, such as the node ID in TDMA-based MAC, does not have to be transmitted. As nodal density increases, the chances of collisions, unbounded delays, and low network throughput performance issues arise. Contrarily, TDMA manages to improve network throughput and reduce collisions by allotting respective time slots to each and every node trying to transmit. There are scenarios where a hybrid of contention-based and contention-free protocols is utilized for channel reservation and contention. Merely based on traffic densities, it is conceivable to opt for an optimal MAC protocol.
There are several earlier survey works40,41 in the literature referring to VANET-QoS issues. The VANET MAC protocols in Hadded et al. 40 and Booysen et al. 41 are categorized into contention-free/TDMA-based and contention-based/non-TDMA-based channel-access mechanisms. The MCMAC protocols reviewed in earlier survey papers40,41 are further summarized in our article in Table 2. However, our primary goal is not to briefly discuss earlier reviewed work in our survey. Our work is rather focused on discussing and reviewing newly devised and few old multichannel-based VANET MAC protocols. This survey article attempts to scrutinize various MCMAC approaches on the basis of corresponding QoS requirements met for safety and non-safety applications, addressed issues, limitations, and so on.
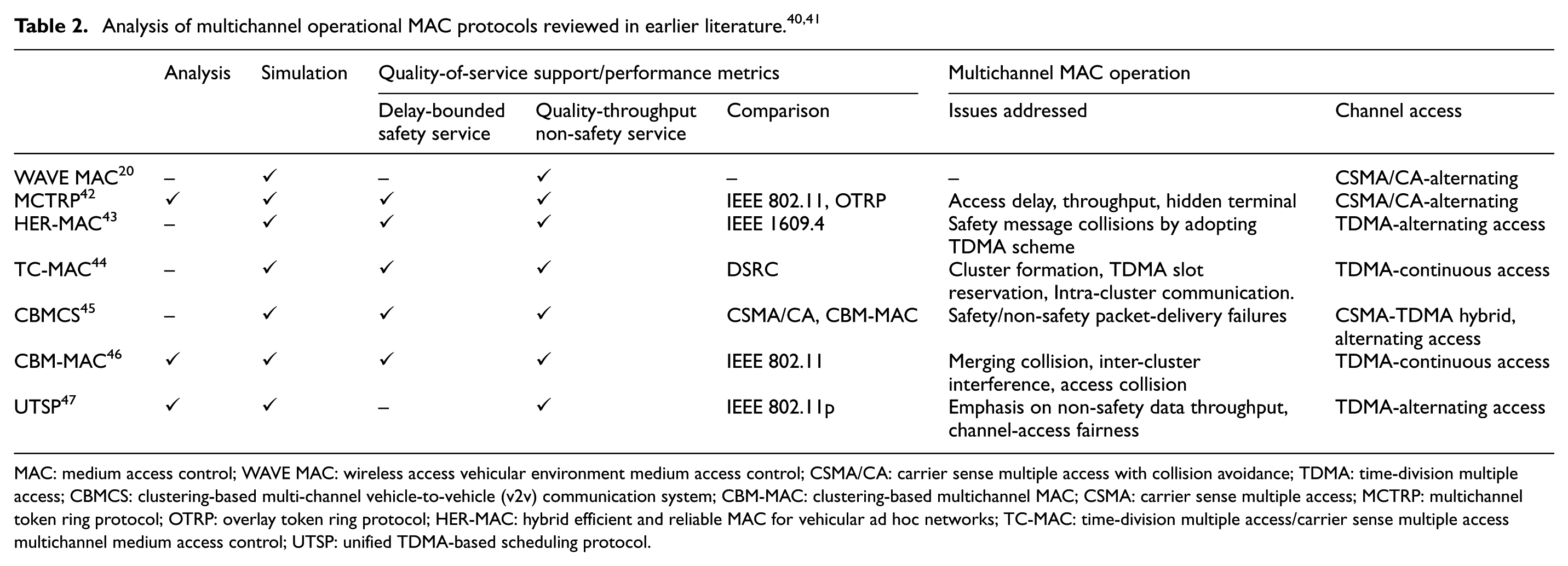
MAC: medium access control; WAVE MAC: wireless access vehicular environment medium access control; CSMA/CA: carrier sense multiple access with collision avoidance; TDMA: time-division multiple access; CBMCS: clustering-based multi-channel vehicle-to-vehicle (v2v) communication system; CBM-MAC: clustering-based multichannel MAC; CSMA: carrier sense multiple access; MCTRP: multichannel token ring protocol; OTRP: overlay token ring protocol; HER-MAC: hybrid efficient and reliable MAC for vehicular ad hoc networks; TC-MAC: time-division multiple access/carrier sense multiple access multichannel medium access control; UTSP: unified TDMA-based scheduling protocol.
Proposed multichannel operational MAC protocols in WAVE and related issues
In this section, we represent our survey work based on recent and some earlier published multichannel operation-based MAC schemes that profess to improve the existing VANET standards, IEEE 802.11p/IEEE 1604.9. These protocols are classified into two categories mainly based on the channel operation mechanism adopted, namely, synchronous and asynchronous channel MCMAC protocols for WAVE. Figure 5 depicts this classification of MCMAC protocols systematically. Synchronous MCMAC protocols describe the interval switching mechanism by MCMAC protocols after every 50 ms. Synchronous multichannel protocols require tight time synchronization and provide exclusive service intervals to safety and non-safety services. On the contrary, asynchronous MCMAC protocols require no such interval switching, and nodes can stay on certain channel for any amount time. There is a specific need of coordination between vehicles as nodes may operate on separate channels. This coordination is mainly maintained using GPS. The schemes that consider both asynchronous and synchronous mechanisms in their work are entitled under hybrid multichannel operation mechanism. The synchronous, asynchronous, and hybrid protocols are further, respectively, classified into contention-based, contention-free, and hybrid of contention-based, and contention-free channel-access mechanisms. The review is mainly based on QoS performance delivery of safety and non-safety applications by these protocols. Further detailed limitations and possible future directions are also mentioned subsequently. In addition, our work is compiled in Table 3, which summarizes QoS constraints dealt, performance comparisons, channel access method adopted, issues addressed, and possible limitations of the protocols reviewed in our survey work.

Classification of multichannel-based WAVE MAC protocols.
Analysis of multichannel operational MAC protocols reviewed in our survey work (section “Proposed multichannel operational MAC protocols in WAVE and related issues”).

MAC: medium access control; RSU: roadside unit; MCMAC: multichannel medium access control; CCH: control channel; MCHT: multichannel hidden node terminal addressed; ST SCH: simultaneous transmissions on different service channels addressed; CSMA: carrier sense multiple access; VEMMAC: an enhanced multi-channel MAC for vehicular ad hoc networks; Sync: synchronous multichannel medium access control scheme; AMCMAC: asynchronous multichannel medium access control; EDCA: enhanced distributed channel access; AMCP: asynchronous multichannel coordination protocol; Async: asynchronous multichannel medium access control scheme; POCA-MCVN: prioritized optimal channel allocation with multichannel vehicular networks; CS-TDMA: scalable CSMA and self-organizing TDMA MAC; SDMA: space-division multiple access; TDMA: time-division multiple access; VeMAC: vehicular MAC; SOFT MAC: space division multiple access for robust ad hoc vehicle communication networks; C-MAC: coordinated multichannel MAC protocol for vehicular ad hoc networks; VANET: vehicular ad hoc network; ADHOC MAC: typical ad hoc based medium access control protocol; VER-MAC: an efficient and reliable MAC in VANETs; C-A MAC: connectivity-aware MAC protocol; ACK: acknowledgment interval; DFSA: dynamic framed slotted ALOHA; VCI: variable CCH interval multichannel medium access control scheme; HTC-MAC: hybrid time-division multiple access/carrier sense multiple access medium access control; HER-MAC: hybrid efficient and reliable MAC for vehicular ad hoc networks; ANC: announcement packet; WSA: wireless access vehicular environment service advertisement; V2V-EDF-CSMA: vehicle-to-vehicle earliest deadline first–carrier sense multiple access; SCH: service channel; CCHI: control channel interval; EDF-CSMA: earliest deadline first–carrier sense multiple access; WAVE MAC: wireless access vehicular environment medium access control; VCI MAC: variable CCH interval multichannel medium access control; CER-MAC: cooperative–efficient–reliable medium access control; DMMAC: dedicated multi-channel MAC protocol design for VANET with adaptive broadcasting; VeSOMAC: self reorganizing MAC protocol for inter-vehicle data transfer applications in vehicular ad hoc networks; QoS: quality of service; V2V: vehicle to vehicle.
The proposed MCMAC schemes discussed in subsequent sections address certain inherent MCMAC protocol–related problems and issues. The addressed problems and issues include multichannel hidden terminal problem, missing receiver problem, hopping time penalty, time synchronization, constraints such as limited aggregate throughput on non-safety services, and uncertain QoS of safety services.21,22 Multichannel hidden terminal problem is prevalent in MCMAC protocols due to the unawareness caused among nodes. The transceivers used in WAVE are half-duplex, which can either transmit or listen on a single channel at a time. Thus, when some nodes are busy exchanging messages on a certain channel, they are unaware of the communication taking place on different channels. Considering a scenario where a pair of nodes (a, b) are exchanging non-safety information on SCH1, they miss the WSA-related request-to-send/clear-to-send (RTS/CTS) packets on CCH between (c, d). Subsequently, (a, b) end their non-safety message exchange on SCH1 and return to CCH. Meanwhile, (c, d) switch to their agreed service channel, supposedly SCH3. This leads to a scenario where (a, b) are unaware of the presence of (c, d) on SCH3. Due to unawareness caused, (a, b) can also choose the same SCH3 for another non-safety data exchange. This problem causes significant collisions on SCHs, further leading to degraded network performances in WAVE environment. Another issue is related to the problem of missing receiver in asynchronous multichannel medium access control (AMCMAC). Missing receiver problem arises when source node initiates a channel negotiation process on CCH and the destination node is busy on another SCH or is absent. This queues up other source nodes (waiting to initiate negotiations) for a substantial wait time until the current source node confirms an unsuccessful handshake. This problem causes subsequent transmission delays and minimizes the asynchronous multichannel performance.
Additionally, as devices are required to hop synchronously between CCH and SCHs, the standard multichannel WAVE protocol requires tight time synchronization. Moreover, this article focuses on the basic limitations of IEEE 1609.4. These limitations are based on whether a particular MAC protocol delivers QoS safety broadcasts. QoS of safety packet is referred to delay-bound transmissions with proper collision and congestion handling. Additional QoS requirement includes high throughput performance of non-safety broadcasts. MCMAC protocols based on TDMA in a distributed network scheme also try to address the problem of merging and access collisions.50,54 Basically, access collision occurs when two or more nodes within same two-hop neighborhood try to access same available time slot. Contrarily, merging collisions occur when two nodes belong to separate coverage areas and are accessing the same time slot within their respective coverage sets. Eventually, the two nodes enter each other’s coverage area and become members of same coverage set. This leads to a condition called merging collision where both nodes within same coverage set are assigned same time slot. Merging collision can be caused when vehicles are moving in opposite directions, moving at varying velocities. After merging collision is detected, at least one vehicle should release its time slot and acquire a new one. Another problem that can occur when two nodes moving in opposite directions toward each other and becoming members of same coverage set is the unnecessary release of time slots by these nodes. It becomes unnecessary in case two nodes are acquiring different time slots in the same frame however release their respective time slots on entering same coverage set even if no merging collision occurs.
RSU-coordinated synchronous MCMAC scheme
Li et al. 21 proposed an RSU-coordinated synchronous MCMAC scheme for VANETs. The proposed scheme deals with the drawbacks of the MCMAC scheme under IEEE 1609.4, where six SCHs are usually underutilized. It introduces the concept of an RSU coordinator to simultaneously appoint specific time periods over different SCH channels to each set of rendezvous vehicles for non-safety–data exchange, thus increasing the throughput rate of non-safety data. It considers a VANET scenario constituting of N number of OBUs which pass through the coverage area of RSU. In this topology, whenever an OBU enters the coverage of a particular RSU, it is able to initiate communication (broadcast/receive) with RSU. Primarily, each OBU is assumed to be equipped with a half-duplex transceiver which can switch between CCH and SCH for safety and non-safety broadcasts, respectively. Secondarily, RSU is considered to be equipped with two separate half-duplex transceivers: transceiver A and transceiver B. Transceiver A follows an asynchronous multichannel pattern by always listening to CCH during both CCHI and SCHI, and it records rendezvous information during SCHI. Rendezvous defines the scheduled meeting of nodes, and this meeting information is called rendezvous information. Meanwhile, transceiver B is able to switch channels between CCH and SCHs. Moreover, CCHI constitutes of individual RSU and request-for-service (RFS) intervals. Transceiver B is responsible for broadcasting the rendezvous information in upcoming RSU interval to avoid multichannel hidden node problem. Basically, RSU acts as a coordinator responsible for coordinating and scheduling these meetings of nodes over different service channels, simultaneously.
Further discussing the channel access, coordination, and reservation pattern, the OBUs required to broadcast safety alert messages (S in Figure 6) contend for CCH access before finally broadcasting safety message during RFS interval in CCHI. Similarly for non-safety transmissions, the OBU tries CCH channel access for reserving any available SCHs. This mechanism requires OBUs to exchange RFS (announcement messages) and clear-to-rendezvous messages (CTR; RFS/CTR in Figure 6) during RFS interval. Eventually, multiple rendezvous pair of nodes can be setup during RFS to rendezvous simultaneously on different SCH channels, example (v1, v8) on SCH1, (v2, v9) on SCH2, and (v3, v10) on SCH3. The transmission parameters (rendezvous time slots utilized and channel information) of these meetings are recorded and updated in the corresponding rendezvous information tables: local service channel rendezvous table-1 (LSRT-1) during CCHI and local service channel rendezvous table-2 (LSRT-2) during SCHI. This updated information is broadcasted by RSU in the next upcoming intervals (SCHI or CCHI, accordingly) to refresh the available SCHs and their time slot information. The nodes that decide to exchange non-safety messages and reserve SCHs during CCHI, simultaneously record this rendezvous pattern information in LSRT-1 which is followed by rendezvous nodes into upcoming SCHI orderly tune into agreed SCHs for non-safety data exchange. Similarly, other nodes switch to CCH during SCHI to reserve one of SCHs in next synchronous interval, and the successful rendezvous information is further recorded in LSRT-2 and broadcasted by RSU in upcoming CCHI. Basically, RSU is responsible for conveying the information to OBUs about the available SCHs and time slots in SCHI. Figure 6 systematically describes this operation of the RSU-coordinated synchronous MCMAC scheme. The channel operation begins with an RSU interval in the CCHI. With the start of the RSU interval, the RSU broadcasts an RSU packet containing the rendezvous information (LSRT-2). This rendezvous information is immediately accepted by the OBUs to update their respective LSRT-2 tables and is further recorded in LSRT-1. Newly recorded LSRT-2 information updates the nodes on reserved/available SCHs and time slots. Furthermore, the nodes utilize a RFS interval to broadcast safety messages and to make service announcements available on other SCHs. During the SCHI, all SCHs can operate at the same time, thus increasing non-safety data throughput.

RSU-coordinated synchronous MCMAC scheme.
Analysis
The scheme shows significant throughput improvement. Considering the low nodal density (20 OBUs), the throughput performance of the proposed scheme is very relevant to that of IEEE 1609.4 and vehicular MAC (VeMAC). 54 However, throughput shows significant improvement comparative to other schemes at higher nodal densities.
Limitation
A 50-ms CCH can be insufficient for broadcasting safety messages, thus causing unwanted data losses. 15 More than that, the safety-related packets are managed along with the non-safety–service announcement packets (ANCs). With high nodal densities, the rate of transmission of emergency packets is predicted to rise. This means limited SCH rendezvous opportunities and an increased load on the CCH, thus leading to more safety-broadcast collisions.
Asynchronous MCMAC scheme for VANETs
Han et al. 22 proposed an asynchronous MCMAC scheme for VANETs with a comparatively large number of nodes. Figure 7 depicts this asynchronous scheme adaptation, that is, nodes do not need to switch intervals from CCH to SCH or vice versa. It improves the typical IEEE 1609.4 MCMAC-related delays and data losses. The losses are caused due to limited CCH and SCH interval times available for broadcast/reception. Further it also aims to address weaknesses in current multichannel schemes: time synchronization difficulty, missing receiver problem, and multichannel hidden terminal problem. Nonetheless, an AMCMAC scheme allows nodes to continuously listen to the CCH and transmit necessary event-driven safety messages. Nodes maintain an updated idle/busy and reserved time slot status for all other SCHs in their SCH table entries. Whenever a pair of nodes requires exchanging non-safety information on any SCH for an available time slot, they broadcast the reserved time slot and SCH information on CCH before switching to agreed SCH. However, when the nodes are switched to SCH and exchanging non-safety messages, they might miss the SCH idle/busy slot status updates on CCH. This lack of slot status information update can cause collision if uninformed node tries to utilize an already reserved SCH or which is currently in use. This type of collision is referred as multichannel hidden terminal problem. AMCMAC solves this problem by allowing the nodes switching to an SCH, to first, listen to the SCH for a short period of time before broadcasting. During the sensing period, if the SCH is found to be busy and currently in use (an on-going transmission), the node returns back to CCH to renegotiate for an available SCH.

Asynchronous MCMAC scheme for VANETs.
When a sender node needs to transmit non-safety data to its neighbor, it primarily accesses the CCH channel following the EDCA contention process. Secondarily, the sender node sends a request-to-send (RTS) packet to the receiver node over the CCH. The RTS packet includes information regarding all the SCHs and the corresponding time slots available to the sender node for communications. On receiving the RTS packet from the sender node, the receiver node searches its SCH entry table for a common SCH channel. If a common service channel is found, it acknowledges by replying with clear-to-send (CTS) packet. After exchanging the necessary handshake, the two nodes switch to the agreed SCH and start the data transmission. Meanwhile, other nodes can continue listening to the CCH for any emergency broadcasts and simultaneously exchange data packets on other remaining SCHs.
Analysis
It is clear that the proposed scheme addresses the tight time synchronization problem, as it does not require switching channels every 50 ms. There is a thorough increase in packet throughput because nodes can remain connected without even a need to switch channels after every 50 ms. Also, nodes sense the SCH for a brief time interval before transmitting through it, thus mitigating the multichannel hidden–node terminal. Moreover, it adopts a timeout method to overcome the missing receiver problem of the asynchronous multichannel scheme. When a sender node does not receive CTS for its RTS, other nodes are not required to wait for network allocation vector (NAV) timer equal to CTS+short interframe space (SIFS) before backing off. Rather, other nodes will immediately start random backoff after SIFS time when a certain sender does not receive the corresponding CTS from missing destination node (busy on other SCH). Additionally, asynchronous MCMAC schemes clearly require no tight time synchronization, and nodes can hop between channels independent of the time. This addresses the weakness of synchronous MCMAC related to hopping time penalty.
Limitation
With the increasing nodal density, there is a probability that a node might spend the maximum time tuned to the SCH exchanging non-safety packets, meanwhile missing nearby safety broadcasts on the CCH. The scheme justifies non-requirement of tight synchronization in AMCMAC by adapting an asynchronous mode of operation; nodes are not required to switch channels every 50 ms. But for non-safety–message exchange, nodes are still required to switch to SCHs with precision, and added vehicle mobility can cause unpredictable delays in transmission/reception. Also, limiting overall synchronization in AMCMAC can leave nodes uninformed about neighboring nodes, and they can miss crucial emergency broadcasts on the CCH.
Prioritized optimal channel allocation schemes for multichannel vehicular networks
Chu et al. 23 described a prioritized optimal channel allocation (POCA) scheme based on the concept of cognitive radio (CR) for multichannel vehicular networks (MCVN). The aim of POCA is oriented toward improving the throughput and reliability of data transmissions. Following the concept of CR applications in multichannel VANETs, nodes are either categorized as primary providers (PPs) or secondary providers (SPs). Correspondingly, the recipient nodes are defined as primary users (PUs) and secondary users (SUs). PPs and SPs differ on the basis of service provided: safety or non-safety, respectively. The PPs and SPs function distinctively during CCH and SCH intervals. In the CCH interval, PPs broadcast safety messages and advertise the non-safety services available in the upcoming SCHI and accordingly schedule the rendezvous. SPs stay tuned to the CCH and listen to emergency broadcasts or stay updated with information exchanged among the PPs. During an SCH interval, the PPs can access any SCH or single CCH for non-safety message broadcasts. In the meantime, SPs can transmit non-safety entertainment messages. The scheme is applied in two different CR network scenarios: a distributed CR scenario called POCA-D and a centralized CR scenario referred as POCA-C. It optimizes the channel-hopping sequence of SPs. Optimizing the channel-hop sequence is mainly to increase the throughput rate and improve QoS. POCA-D restricts SPs from initiating rendezvous negotiations on CCH during CCHI. Contrarily, PPs are obliged to broadcast safety-related messages and WSA frames in CCHI. Furthermore, during SCHI, PPs exchange non-critical messages according to the WSA frames announced during CCHI. However, in order to access the channels during the SCH interval, the SPs follow a default channel-hopping sequence generated using a pseudo-random generator in a discrete probability distribution, h_s = {h_(s, i)|i = 1 to 6}, where h_(s, i) is the channel-hopping probability of the SP on the ith channel. After successfully acquiring the channel access in SCHI, SPs will broadcast non-safety services. Those SPs (nodes) that hop on the same channel and respond to these service advertisements will act as SUs (receivers). It basically considers two types of network scenarios: paired and non-paired networks.
In paired network, a PP and PU, and SP and SU will always find each other, correspondingly. Meanwhile, in a non-paired network, the (SU or PU) receivers of particular SP or PP can change over time. A provider can also act as a receiver to data transmitted by other providers. In this case, SPs stochastically (randomly) select a channel to hop on and contend for data transmission. Finally, after contending and accessing the channel, some nodes act as SPs (providers) and some turn into SUs (receivers) and respond to non-safety services. There is no pre-defined sender (SP/PP) and receiver (SU/PU) prior to pseudo-random channel-hopping process, but only the type of data to be transmitted: safety or non-safety. Additionally, PPs also follow a discrete probability distribution, h_p = {h_(p, i) |i = 1 to 6}, to access SCHs in the SCHI, where h_(p, i) denotes the PP’s ith channel-access probability. Furthermore, POCA-C allows SPs to exchange control messages during SCHI to rendezvous in a transmission slot time available on any available SCH. The control messages contain the SP’s channel allocation information. This information is obtained on the basis of number of PPs and their reserved SCH time slots during CCHI in CCH. POCA adopts a modified EDCA scheme by assigning high-priority ACs to PPs and low-priority ACs to SPs. This is done by providing PPs with shorter backoff window than SPs.
Analysis
The article utilizes POCA protocols to improve IEEE 1609.4 channel utilization and throughput. The article divides the network nodes into PPs and SPs based on the type of priority. Each node broadcasts or accesses the channel based on priority, which probably sets out to improve the aggregated throughput of the SPs and to guarantee the safety message QoS transmissions of PPs.
Limitations
The scheme is mainly safety service–oriented, and there is no guarantee on improving non-safety–transmission throughput delivered by SPs. The scheme modifies the EDCA mechanism and allocates ACs according to high/low priorities of the nodes. This may cause channel-access collisions for PPs or SPs, independently. Both scenarios are considered under the saturated nodal density state, which does not provide enough insight into the POCA-D or POCA-C schemes in a multihop network. Future research can consider vehicles approaching from the front and back to provide more explanations about the model in terms of hidden/exposed node problems. Moreover, the scheme does not mention any use of updated information lists to keep other nodes aware of the channels’ busy/idle status.
CS and self-organizing TDMA
Zhang et al. 50 proposes a MCMAC protocol for VANETs. The channel-access mechanism emphasizes on adopting combined advantages of CSMA, TDMA, and SDMA to meet QoS requirements and avoid hidden node problems. scalable CSMA and self-organizing TDMA MAC (CS-TDMA) improvises on its predecessor space division multiple access for robust ad hoc vehicle communication networks (SOFT MAC) 51 by implementing multichannel operation instead of single-channel operation. CS-TDMA follows a dynamic mechanism to adjust the length of CCH interval and SCH interval according to the traffic density. In case of high traffic density where vehicles are more prone to broadcast emergency messages, the CCH interval will be significantly greater than SCH interval. Contrarily, when the traffic density is lower than normal, the SCH interval will be maximized.
Analysis
CS-TDMA dynamically adjusts the lengths of CCH and SCH intervals. When scheme focuses on maximizing CCH interval for high vehicle densities means that the delay sensitivity requirements of emergency packets are significantly met. Meanwhile, when vehicle density is low, correspondingly maximizing the length of SCH interval ensures the high throughput requirements of non-safety packets are met. The scheme follows a cluster-based mechanism and provides each vehicle in its coverage area with a respective time slot for transmission purpose (TDMA). However, the reservation of time slot is based on CSMA contention–based mechanism. The clusters are actually formed when the service region is divided into set of region units called clusters. Each cluster umbrellas a certain number of vehicles which contend for transmission and possess set of non-overlapping frequency sub-carriers. A node at a particular time instant can only be covered by a single cluster and not more than that. The time slot assignment to vehicles within cluster is done by a cluster head. The cluster head is also responsible for admitting new vehicles into the cluster and further assigning them new transmission time slots. This scheme overcomes the hidden node problem because an intermediate node (cluster head) is responsible for assigning distinct transmission time slots for each vehicle within the cluster.
Limitations
Although the scheme assigns TDMA-based distinct transmission slots to the vehicles, the reservation of these slots follow a contention-based mechanism. In case two vehicles count down the backoff counter to zero and access the channel at the same time, then all reservation requests will fail and vehicles are required to request once more. Moreover, merging and access collisions are not verified in the CS-TDMA scheme.
Coordinated MCMAC protocol for VANETs
In Kim et al., 52 the MCMAC emphasizes on following a contention-free broadcasting approach for safety services by utilizing RSU for coordination purpose. The importance of RSU is that it schedules the transmission order for safety messages. Scheduling and coordinating the transmission order of safety messages lowers the collision probability and thus reducing the safety transmission delays. Also RSU improves the data collection rates and safety messages by the mechanism of coordination. The article improvises on the previous 9 work where the rate of safety message transmission times were pre-defined and fixed. Due to varying number of nodes, the fixed transmission time rate of safety-broadcast times might not be convenient.
First and foremost, the proposed scheme considers a familiar scenario of a single RSU (coordinator) and related OBU vehicular nodes (being coordinated) entering its coverage area. The CCHI of the proposed scheme is divided into three intervals: (1) length information broadcast phase (LIBP), (2) safety message phase (SMP), and (3) channel reservation phase (CRP). During LIBP, an RSU transmits length information (LI) message to convey other nodes about the coordination scheme of CCHI as well as the schedule for the time slots of SMP. LI packet helps the neighboring nodes entering the RSU coverage area to become aware of the coordination of CCHI and the broadcast order of nodes during SMP. After nodes receive all coordination information during LIBP, the SMP begins. During SMP, the vehicles start broadcasting the safety messages according to the scheduling information received earlier in LI packet. After the SMP, the CRP begins. During CRP, the vehicle nodes included in the LI information packet contend to acquire the rendezvous time slot on SCHs during SCHI. After CCHI ends, SCHI begins. During SCHI, the vehicles that reserved the SCHs for rendezvous, tune to SCHs and start their respective non-safety data transmission. Meanwhile (in SCHI), the newly entering vehicles in the scenario utilize CCH to broadcast safety packets and also contend to obtain transmission opportunities during CCHI using dynamic frame-slotted ALOHA (DFSA). The nodes that successfully obtain the transmission opportunity in CCHI are included in the LI packet and provided their respective transmission time slots in SMP and CRP.
Secondarily, the proposed scheme considers that the newly entering vehicles are not assigned the safety transmission slots yet. In order to obtain the transmission slots, the nodes must undergo DFSA-based identification process executed by RSU. DFSA procedure consists of vehicle density-based time frame mechanism. For better understanding the scheme considers three frames, (1) Frame 1, (2) Frame 2, and so on, depending on the vehicle density and collision within the frame. Each frame has a control slot (CS) and then subsequent time slots. The scheme assumes that RSU is aware of the average velocity, mean density of the vehicles, and length of synchronization interval. Eventually, when vehicles enter the RSU coverage area, RSU tallies the number of vehicles entering and accordingly determines size of the first frame (Frame 1). RSU broadcasts this information broadcasted as a query packet during CS. Furthermore, RSU allocates same vehicle number of time slots after CS slot. On receiving CS query packet, the vehicle nodes select their respective time slots within the frame in a random fashion. Vehicle nodes broadcast an acknowledgement safety message during the selected time slot. On receiving this safety acknowledgement message, RSU identifies the time slots utilized by each vehicle. However, in case two or more than two vehicles select a same time slot, the collision occurs. Accordingly, RSU determines the size of next frame (Frame 2), which is based on the slots utilized and collision slots. It estimates the number of contending vehicles based on the ratio of collision slots to total number of slots or ratio of idle slots to total number of slots. In case of collision, after Frame 1, the RSU once more determines the Frame 2 size based on collision information and in similar fashion broadcasts it as query packet in CS slot. For example, in case two vehicles collided in one time slot during Frame 1, RSU allocates two time slots in Frame 2. This mechanism is repeated until all vehicles are identified, and if not, then until the end of SCHI. The RSU utilizes this vehicle identification information and prepares LI packet for upcoming synchronization interval.
Analysis
The proposed coordinated multichannel MAC protocol for vehicular ad hoc networks (C-MAC) allows the vehicles entering the RSU coverage to reserve CCH during SCHI utilizing DFSA. Furthermore, the RSU coordinates the transmission order of the safety messages from reservation information. Moreover, the CCH interval constitutes of separate SMP and CRP for safety broadcasts and channel reservation purposes, respectively. The length of SMP is dynamic and depends on the number of vehicles identified by RSU during previous SCH interval. As vehicles broadcast safety messages in a contention-free manner and CCH interval defines varying safety broadcast times, the reception rate of safety packets is enhanced. The proposed C-MAC protocol consumes less time to transmit the safety packets without collisions and also improves the safety packet delay performance in dynamic environment.
Limitations
The scheme assumes that a vehicle can only transmit event-driven critical safety message during its allotted time. However, a fixed time slot selection for random safety event is not robust.
An efficient time slot acquisition on the hybrid TDMA/CSMA MCMAC in VANETs
Nguyen et al. 59 have proposed a hybrid time-division multiple access/carrier sense multiple access medium access control (HTC-MAC) protocol for VANETs. The hybrid scheme allows efficient packet transmission and throughput on CCH. HTC-MAC is a multichannel improvement of the hybrid efficient and reliable MAC for vehicular ad hoc networks (HER-MAC) 43 protocol as it eliminates the unnecessary control packets such as HELLO and SWITCH in HER-MAC. Moreover, HTC-MAC differs from HER-MAC by allowing new nodes to successfully acquire transmission slots and decreasing the collision probability.
Analysis
The HTC-MAC defines both TDMA and CSMA multiple access schemes. Nodes must be switched to CCH in order to broadcast safety message or exchange rendezvous messages. The CCH interval is further divided into two parts: TDMA-based reservation period (RP) and CP. RP consists of a number of time slots dedicated for safety application broadcasts. Also, each node must reserve exactly one time slot in RP. In order to do so, each node transmits an ANC. Upon receiving the ANCs from neighboring nodes, each node becomes aware of neighbor node identification, reserved time slot, and so on. Nonetheless, with the increasing number of new nodes, the probability of packet collisions and channel reservation collisions increase, respectively. This determines the increased probability of ANC collisions during time slot channel reservation. As the nodal density increases, the number of contending nodes per time slot in RP also increases causing unwanted channel reservation collision during RP. The proposed scheme does not discuss any idea to mitigate the problem of channel reservation collision and can be suggested as future work. Similarly, CP is responsible for exchanging WAVE service advertisement messages. The length of RP and CP is dynamic and depends on the current vehicle density.
Limitations
When the traffic density is high, the RP duration is maximized to ensure bounded transmission delay for event-driven safety messages. HTC-MAC achieves a significant improvement in multichannel utilization, but as the RP increases, the CP significantly decreases. The decrease in CP consequently increases the collision probability due to large number of nodes attempting to broadcast WSA/RES (SCHI Time slot Reservation Confirmation packet)/acknowledgment interval (ACK) packets. Moreover, HTC-MAC requires relatively larger ANC payload size to broadcast its neighbor’s information in high nodal densities.
V2V QoS-guaranteed channel access in IEEE 802.11p VANETs
Chang et al. 24 proposed a scheme primarily focused on developing a VANET-favorable WAVE environment with a multichannel schematic model for data transmissions, taking all QoS requirements into consideration. It deals with the problem of a fundamental channel-access mechanism for WAVE, that is, EDCA. EDCA fails to define a fair channel-access mechanism affecting the mandatory VANET-QoS requirements. They assumed an environmental scenario is a cluster-based ad hoc mode. The scenario constitutes multiple nodes/clients (group members (GMs)) forming a WAVE service group (WSG). A nominated vehicle node acts as the group head (GH) to the WSG.
Analysis
Primarily, the GH organizes all requesting GMs accordingly and distributes all GMs around the CCH and the six SCHs. GMs request a GH utilizing six different SCHs or the CCH. The GH listens to these requests by switching between the CCH and the SCHs after every 50 ms. All GMs, being aware of the current channel frequency status of the GH, send an RFS packet to the GH. The RFS packet encodes delay-bound information to meet the required QoS for transmission. This information is referred to as a transmission specification (TSPEC) and also includes the destination MAC address. The GH receives the TSPEC and determines whether it meets the required QoS of the GM. Serving all TSPEC requirements, the GH reserves a channel for the requesting GM following the admission control unit (ACU). The ACU determines whether the packet to be transmitted has a delay limitation within the minimum delay bound. After the GH reserves all the possible GMs for transmission, the GMs are categorized based on channels assigned and their respective delay-bound information. An aggregated category table (ACT) defines these categories, such that GMs that are allotted the same channel and delay bound are put into the same category. Later, the GM checks its position in the category table by analyzing the member ID sub-field of station_info. For coordinated and fair transmissions, the GMs follow earliest-deadline-first–carrier sense multiple access (EDF-CSMA). Following EDF-CSMA, GMs in same category initiate an EDF-backoff procedure and transmit packets once the backoff timer reaches zero. Unlike a standard distributed coordination function (DCF) scheme, the EDF-backoff value selection is based on the latest service time of each category in the ACT. The latest service time for each category is defined by the delay-bound value of each GM. Each GM exhibits a different delay bound or deadline. Moreover, as each GM stores the ACT table, it can determine the deadline of other GMs in the category. After surpassing these deadlines, the GMs refresh their ACT tables to determine new sorting positions, and hence, new backoff values. It is evident that each GM has a unique backoff value, and only one GM reaches zero at any one particular instant. This achieves collision-free channel access based on EDF-CSMA.
Limitations
The proposed scheme has yet to be analyzed under multihop and heterogeneous networks, where a QoS channel resource allocation scheme can be proposed for inter-connecting WSGs that are positioned more than one hop from the GH. The ACU, as defined in the article, mainly gives a brief idea about the GMs’ minimum delay-bound calculations and provides limited information about the process of a GH’s channel assignment after reserving a GM for transmission. After being reserved by the GH for transmission in phase 1, the GM has to delay until the beginning of the next same interval to start an EDF-CSMA–based backoff for transmission in phase 2. However, if the vehicles initiate phase 2 during a CCH interval, they can supposedly miss real-time emergency broadcasts. There are several multichannel coordination approaches discussed by Chen and Heinzelman, 63 where multiple frequency channels are efficiently utilized.
VeMAC: TDMA-based MAC protocol for reliable broadcast in VANETs
The method proposed by Omar et al. 54 lays more emphasis on improving the QoS of safety packets. The quality of a broadcast service in any network is directly dependent on collisions, delay, and system throughput. Omar’s VeMAC is a TDMA-based scheme to improve hidden node–terminal disputes among nodes and RSUs. It achieves this by assigning disjoint time slots to each vehicle trying to access the channel. Following TDMA, the vehicles avoid the randomized CSMA/CA channel selection method causing possible network collisions and interference. 60 VeMAC enhances network reliability and awareness by supporting multihop ad hoc broadcasts on a CCH. It supports the use of two transceivers, both switched to the CCH or an SCH. So, during frame transmissions, nodes are aware of the time slot status of vehicle nodes up to two hops away. Nodes avoid collisions by exchanging reserved time slot information over the CCH. This information updates nodes in a multihop neighborhood, thus avoiding the hidden node–terminal problem. The exchanged information also includes announcements of services (AnS), acknowledgement or acceptance of services (AcS), and high-priority short applications for safety-related services. The AnS is utilized by a provider node during CCH broadcast to announce the availability of services on a particular SCH. Moreover, when such an AnS is acknowledged by any one-hop node, the provider tunes transceiver-2 to the acknowledged SCH and starts providing services.
Analysis
The nodes access time slots on the CCH primarily by initiating a collision-detection process. Each node randomly chooses a time slot and checks if any of the neighboring nodes within two hops simultaneously attempt to acquire the same time slot. If at least one node within a two-hop neighborhood tries to access the same time slot, then access collision will be detected. Conversely, if no such access collision is detected, then the node is recognized by the neighboring nodes. It also improves the condition of slot-release prevention (SRP),61,62 to prevent nodes from unnecessarily releasing their time slots. This is done by a mechanism of node identification in VeMAC. When vehicle nodes enter each other’s coverage area, they transmit their respective time slot information. On receiving this information, nodes become aware of each other’s slot assignments. This prevents nodes from unnecessarily releasing their time slots even if no merging collisions occur.
Limitations
One of the limitations of VeMAC lies in its approach of transmitting comparatively larger control information over the CCH, resulting in greater overhead. The proposed scheme does not consider the density of vehicles in either direction, or the time slots can be dynamically reconfigured accordingly. Also, if the node fails to acquire any time slot, then the time of reassessment to acquire a new time slot adds a broadcasting delay. The effect of RSUs on VeMAC performance can be investigated by implementing more realistic urban and highway models. The mechanisms that allow nodes to access more than one time slot per frame on a CCH are looked forward to in future research. The amount of delay faced by the packets on the CCH can also be examined. The packet errors caused by a poor wireless channel can be wrongly interpreted as transmission collision. Thus, investigating the noise, fading, and shadowing of asymmetric wireless channels is necessary.
VER-MAC
This proposed model by Dang et al. 9 tends to improve the reliability and throughput of VANETs by allowing nodes to exchange safety packets (on a CCH) and service packets (on an SCH) during the whole Sync interval. It also improves on packet-delivery ratio by allowing nodes to retransmit emergency packets during the whole 100 ms Sync interval. The reason for choosing CCH as a rebroadcast channel is in the VER-MAC’s motive to provide uninterrupted and collision-free non-safety services on SCHs. Additionally, the proposed scheme provides nodes with a common CCH to hop back on to during SCHI and listen to important emergency rebroadcasts. Otherwise, if any SCH is selected for emergency rebroadcasts, the non-safety services on that particular SCH will suffer, leaving CCH itself underutilized or vacant during SCHI. A two-dimensional (2D) Markov chain model is used to analyze the performance of both IEEE 1609.4 and VER-MAC.
Analysis
The proposed scheme improvises transmission delays and throughput by devising the SCHI and the CCHI for safety and non-safety services, respectively. The scheme delivers a high packet-delivery ratio with respect to the IEEE 1609.4 standard. However, the scheme faces delay constraints, and the author considers that a future research direction.
Limitation
The scheme improves safety message throughput through rebroadcasting. A safety message rebroadcast takes place after delaying the first message broadcast by 50 ms. However, in the long run, several rebroadcast delays affect system performance. It also considers safety message retransmission on a CCH in a time slot during an SCH interval, at the very moment nodes can be tuned to other SCHs, and hence, they can miss emergency packet rebroadcasts as well. Also, during the WSA on a CCH in the CCHI, there is a possibility that some nodes are switched to other SCHs. In this manner, nodes on SCH are unaware of service channel negotiations taking place on CCH and fail to update this information in their respective tables. The tables store information regarding transmission slots used by neighbors and remaining available transmission slots as neighbor information list (NIL) and channel usage list (CUL), respectively. Moreover, the nodes on SCH may miss the critical emergency broadcasts on CCH during CCHI.
Connectivity-aware MAC protocol for platoon-based VANETs
The method proposed by Shao et al. 55 provides a MAC scheme for a platoon-based VANET multichannel protocol. The article analyzes various possible RSU–vehicle and vehicle-to-vehicle one-way and two-way connection scenarios for MAC modeling. Furthermore, the scheme utilizes a multipriority Markov chain model to investigate the connectivity probability between nodes, as well as the data throughput correlation. Moreover, varying vehicular density and network connectivity parameters are utilized to dynamically adjust the lengths of the CCHI and the SCHI for optimal multichannel operation. The length of the CCHI for emergency-prone high-traffic volumes is dynamically set to greater than the SCHI and vice versa. The CCHI is further divided into three time fields: a safety interval (SAFI), a WAVE service advertisement interval (WSAI), and an acknowledgement interval (ACKI). The SAFI deals with broadcast of safety packets, the WSAI deals with announcements of non-safety services on other SCHs, and the ACKI is utilized by the sender nodes for ACKs from the receiver nodes.
Analysis
The total number of nodes within a network opting for safety services defines the corresponding length of the SAFI. Similarly, the WSAI time span is obtained from the Markov chain model of WSA packets, and finally, the ACKI is dependent on the number of nodes acknowledging the safety packets or service packets. Hence, the connectivity-aware MAC protocol further utilizes this information to calculate the optimal length of each interval with the CCHI and forwards it to other nodes and platoons.
Limitations
The scheme assumes that not all vehicular nodes transmit safety messages during CCH. But in a highly dense VANET scenario, the rate of transmission of emergency packets is expected to increase. In that case, the ACK interval may not be long enough to accommodate a large number of acknowledgements.
Cooperative–efficient–reliable MAC protocol for VANETs
Dang et al. 56 proposed cooperative–efficient–reliable MAC (CER-MAC) protocol for efficient and reliable safety/non-safety transmissions. Presumably, the CER-MAC does not follow a typical IEEE 1609.4 concept of CCHI/SCHI intervals. The whole synchronization interval in the CER-MAC is divided into a RP and a CP instead of separate CCHI and SCHI. RP is utilized by vehicles to broadcast/rebroadcast emergency packets on the CCH. CER-MAC supports up to a two-hop broadcast mechanism in a two-way highway scenario. The time span of the RP is dynamically adjusted according to the number of two-hop nodes in the network. Furthermore, the time span is fragmented into N_e EmgSlots. In order to avoid the merging collision scenario, as mentioned in VeMAC, 54 the EmgSlots are designated to vehicles moving in opposite directions alternatively, that is, vehicles moving from left to right reserve odd-numbered EmgSlots, and those moving from right to left reserve even-numbered EmgSlots. Conversely, the CP is utilized by nodes for WAVE service advertisement messages and RFS services. Also, as there are no dedicated time intervals for CCH or SCHs, the nodes may switch to any channel at any given time instant. This means while some nodes are busy reserving emergency time slots during RP or processing CP on CCH, other nodes may be exchanging data on SCHs, simultaneously.
Analysis
CER-MAC utilizes a TDMA access scheme to improve the reliability of safety packet transmissions and retransmissions. The CER-MAC scheme allows non-safety transmissions during the CCHI, which tends to show throughput improvement in comparison to standard IEEE 1609.4 MCMAC. The scheme also delivers a high packet-delivery ratio for emergency packets.
Limitations
The scheme certainly improves non-safety–packet throughput by utilizing the CCH interval. However, the nodes exchanging data on other SCHs in the same interval can possibly miss an emergency broadcast on the CCH. To comply with the packet-delivery ratio and throughput QoS requirement of the scheme, the neighboring nodes must be switched to the CCH during the RP. However, nodes can switch to other SCHs for non-safety transmissions. It consumes large packet overhead and requires very tight time synchronization to broadcast hello messages in order to help neighbors update their time slot status and start the negotiation procedure.
Dedicated MCMAC with adaptive broadcasting
Dedicated multi-channel MAC protocol design for VANET with adaptive broadcasting (DMMAC) 57 is an improvement on the IEEE 1609.4 MAC protocol. It is significantly dedicated to reducing access collisions and improving delay-bound limitations of emergency message broadcasts, considering varying nodal densities. The CCH constitutes adaptive broadcast frame (ABF) and CSMA/CA-based reservation period (CsRP) intervals. The DMMAC multichannel mechanism adopts a dynamic safety interval (ABF) for safety packet transmissions. It is dynamically minimized or maximized according to the varying traffic density. The ABF is segmented into several time slots that are reserved by the nodes as a basic channel (BCH) for collision-free and delay-bound safety message broadcasts. The CRP interval is dedicated to non-safety–message negotiations. The nodes negotiate during the CRP interval and reserve a rendezvous time slot on a given SCH that is available to both.
Analysis
With the stringent QoS requirements of safety applications, this article mainly emphasizes delivering a dynamic safety interval–time window. The time-window ABF includes time slots and can dynamically adapt to the changing nodal density. Although the length of the ABF is dynamically adaptive, there is a limit to it. The reservation process in the ABF is based on the listening mechanism of time slots that are not already reserved by the neighboring nodes within a two-hop range. This reservation information is shared by each vehicle in its frame information (FI) broadcast. Each vehicle updates this information and sorts out the non-reserved time slots that can be utilized as its BCH. After reserving a particular time slot, the vehicle is supposed to keep listening to the ABF until it is not sure of time slot availability. Successful transmission in this time slot will also mean that the node utilizes the same slot during its ABF.
Limitations
The scheme follows the CSMA/CA-based channel access scheme, and the scenario is a two-hop topology. The CSMA/CA imparts the hidden node terminal problem due to vehicles joining the topology, and it is not discussed. Due to the changing topology, certain ABF slots may be emptied. So, utilizing the same slots and not switching to empty ones to reduce ABF length may lead to a waste of empty slots, as there is the possibility of no new vehicles entering the topology. CER-MAC 56 deals with this limitation and switches nodes to the empty slots to avoid band wastage. Moreover, the scheme may use one designated SCH in SCH interval which leads to wastage of other five SCHs.
Self-organizing MAC protocol for DSRC-based VANETs
Yu and Biswas 58 proposed VeSOMAC, which adopts a self-configuring TDMA protocol to improve inter-nodal packet throughput with short and deterministic delay bounds. The main framework of self reorganizing MAC protocol for inter-vehicle data transfer applications in vehicular ad hoc networks (VeSOMAC) is its in-band control mechanism. An in-band header bitmap vector is responsible for exchanging TDMA slot information during distributed MAC scheduling among the nodes. Basically, in-band bitmap contains the information regarding the slots reserved by neighboring nodes. This information is spread across the network using bitmap header. On receiving and acknowledging this bitmap header, nodes are able to determine the neighboring nodes’ occupied time slots and therefore avoiding collisions. These features contribute to the self-configuring features of VeSOMAC. As the nodes are able to share their slot information, they can thus reconfigure and select a new time slot for transmission.
Analysis
The scheme does not rely on any sort of RSU or virtual schedulers, such as GHs in a platoon-based network for slot reconfiguration. VeSOMAC basically operates in both synchronous and asynchronous modes. Vehicles in synchronous mode are assumed to be in time synchronization, and due to different frame lengths in asynchronous mode, there exists no such synchronization.
Limitation
The scheme’s ability to detect collisions does not mitigate the access and merging collisions from the MAC scheme. Hidden/exposed nodes are still an issue, due to the varying mobility of nodes. The scheme proposes considering urban scenarios and safety applications as future work.
Conclusion
MAC protocol for safe, efficient, and reliable vehicle communications is mandatory in ITS. In this article, we discuss the functions of upper and lower WAVE MAC (IEEE 1609.4/IEEE 802.11p). Then, we deliver a review of the benefits and limitations of various WAVE MCMAC protocols proposed in the recent past. We summarize and discuss the various MAC approaches and give a brief analysis of the proposed mechanisms. Such mechanisms include RSU-coordinated synchronous MCMAC; asynchronous MCMAC; POCA priority-based optimal channel allocation in multichannels; the EDF-CSMA earliest-deadline-first–based vehicle-to-vehicle channel access scheme; the TDMA-based MCMAC protocol; VeMAC, for reliable broadcast; efficient and reliable multichannel an efficient and reliable MAC in VANETs (VER-MAC); CER-MAC for VANETs based on safety message rebroadcasting; and the centralized platoon-based connectivity-aware MCMAC protocol. Our work evaluates various MCMAC protocols on the basis of QoS requirements met for safety and non-safety applications. Moreover, an attempt is made to point out limitations in the proposed works. By contemplating the limitations, this survey seeks to contribute toward future research and development of efficient and reliable multichannel VANET MAC protocols.
Footnotes
Academic Editor: Carlos Calafate
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the 2016 Yeungnam University Research Grant.