
Abstract
In recent years, the massive increase in car ownership has led to a dramatic increase of traffic accidents, especially in the case of multi-vehicle chain collisions. However, most researches of collision warning systems are focused on the single vehicle collision warning, because it is hard to get the accurate distance and location of the non-line of sight vehicle with the traditional ultrasonic or laser ranging methods. Nowadays, many intelligent transportation systems are based on global navigation satellite systems with the positioning accuracy of more than 10 m even in ideal environments. At the same time, global navigation satellite system often fails to operate in non-line of sight areas, such as forests, tunnels, or downtown. IEEE 802.11p is developed for vehicle-to-vehicle (V2V) communication in order to meet the requirement for high accuracy in high speed and multipath vehicle environments. In this article, we proposed an efficient time of arrival or ranging estimation method using IEEE 802.11p short preamble in order to mitigate the effect of multipath and low signal noise ratio. First, the time of arrival estimation is performed using autocorrelation and cross-correlation (auto-cross). And then, the approach to iterative update is presented to find the accurate time offset. Simulation results, in the international telecommunication union vehicle A channel and an additive white Gaussian noise channel, indicate that the proposed ranging method achieves superior accuracy over the traditional methods even in low signal noise ratio conditions and multipath environments.
Introduction
According to the report in 2018 by World Health Organization (WHO), 1 even if road traffic accident has decreased, deaths remain unacceptably high at 1.35 million per year, which has become the dominant factor for young people aged from 5 to 29 years old. Cooperative collision avoidance or warning systems in vehicle application can help to predict potential hazards and decrease the probability of an accident. 2 Therefore, reducing vehicle collisions effectively can mitigate damage and save lives in the future. In intelligent transportation systems (ITS), vehicle positioning techniques can provide multivehicle chain collision warning, 3 thus, the demand for accuracy of vehicle location is increasing.
There are many ways to achieve vehicle communication in vehicular ad hoc networks (VANETs) such as satellite and dedicated short range communications (DSRC). Nowadays, global navigation satellite systems (GNSS) like global positioning system (GPS)4–6 and BeiDou navigation satellite system (BDS)7,8 play a pivotal role in ITS. In general, critical location techniques in VANETs based on GNSS have been developed, containing receivers for radio, digital map information matching, 9 vehicle models, and motion sensors. However, they are limited to weak GNSS signal which is susceptible to interference like natural environment effects (e.g. thunder-storm, solar flares) and signal interference of multipath (e.g. forests, buildings, tunnel, etc.). 10 In 2018, GPS III and BDS III were launched whose positioning accuracy can reach several meters under open sky environments. However, under urban canyon and dense foliage environments, the receiver could not provide enough services for vehicle collision warning system adequately due to the signal blockage or multipath. Moreover, these methods cannot bring performance and cost into balance. For these reasons, the IEEE 802.11 family of standards attain balance from implementation cost and performance in poisoning application.
In view of these drawbacks in GNSS-dark areas, positioning technologies based on wireless sensor network (WSN) like radar or 802.11p 11 have been employed in vehicle-to-vehicle (V2V) communication, in order to meet the requirement for excellent accuracy in high speed and multipath vehicle environment. At present, radar ranging is commonly used in vehicle anti-collision system, such as infrared radar, ultrasonic radar, and laser radar. However, the transmission range is limited for both infrared radar and ultrasonic radar. Laser radar can travel very far but it cannot penetrate obstacles which is very common in vehicle environment. Thus, all these radar technologies are not applicable in multi-vehicle chain collisions void system because of the non-line of sight (NLOS) communication. On the contrary, IEEE 802.11p can transmit several hundreds of meters in NLOS system.
WSN positioning techniques develop rapidly, such as the location techniques of reinforcement learning and machine learning. In summary, positioning methods can be divided into range-free and range-based positioning. The range-free algorithms estimate sensor node’s coordinates using the connectivity information except ranges information (i.e. angle, distance, or time), that is, some fingerprint-based localization approaches in Zhou et al.12–14 The range-based algorithms need the ranges or distances among all the sensor nodes, which are calculated using some physical parameters of communication signals, that is, received signal strength indicator (RSSI),15,16 angle of arrival (AOA), 17 time of arrival (TOA), 18 or time difference of arrival (TDOA). Among these models, the RSSI technique is a cost-efficient solution for ranging as it does not need any auxiliary of extra hardware. However, its performance is affected by channel fading and multipath. AOA method determines the angle of the incident signal by using multi-array antennas of base-stations, while in the NLOS circumstances, it is hard to determine which direction the signal comes from. TOA measurement is relatively easy to acquire by electromagnetic wave speed, wavelength, and time for the radio signal. Time delay, one of the important parameters in TOA estimation, is evaluated under various propagation conditions, especially in IEEE 802.11p environment. Physical layer of IEEE 802.11p is based on the 802.11a revision which uses orthogonal frequency division modulation (OFDM), so OFDM signal is used for TOA estimation in this article.
Currently, plentiful timing offset estimation algorithms have been developed for OFDM systems. One of the best classical autocorrelation analysis algorithm is proposed by Schmidl and Cox, 19 named as SC method, exploiting a preamble containing two identical halves in the time domain. However, the timing metric plateau, which is the length of cyclic prefix (CP) region, results in ambiguity of timing estimate. Minn et al. 20 designed a MZB method of averaging over fixed window of guard interval length as modifications to Schmidl’s method. Although Minn’s method provides a sharper timing metric, the variance of timing estimation is quite large in multipath fading channel. Both SC and MZB methods use autocorrelation analysis. In Awoseyila et al., 21 the combination of autocorrelation with the cross-correlation is proposed; however, this method is used to filter the unwanted peaks and set the threshold for cross-correlation analysis, so it is a cross-correlation method essentially.
The main contribution of this article is to propose a new timing offset estimation or ranging method to alleviate the influence of low signal noise ratio (SNR) and multipath environment in VANET. This article is organized as follows. In “Introduction” section, the problems associated with the factors that affect positioning accuracy are outlined and then the well-known proposed positioning methods are discussed, especially some timing offset estimation methods using OFDM. In “Vehicle ranging model” section, the vehicle ranging model is presented. In “Proposed method” section, a new ranging method is proposed in the time domain. In “Performance results and discussion” section, the simulation and the performance results in an additive white Gaussian noise (AWGN) channel and the international telecommunication union vehicle A (ITUA) 22 channel are presented, and “Conclusion” section concludes this article.
Vehicle ranging model
DSRC is an IEEE standard developed for VANET, with high mobility and high real-time performance, especially supporting low-latency vehicle-vehicle and vehicle-to-road data transmission. A few hundred meters of communication distance meet the needs of most applications. The IEEE 802.11p protocol is used in the physical layer of wireless access vehicular environment (WAVE). It is based on the extension of the IEEE 802.11a standard which has low delay spread and slow time-varying channel characteristics with great expectations to provide safe auto-navigation applications in modern ITS. The preamble symbol used for time synchronization is introduced as follows.
IEEE 802.11p preamble model
Just as 802.11a, 802.11p adopts OFDM in physical layer. The signal bandwidth is 10 MHz, half of 802.11a. There are 64 subcarriers with an interval of 156.25 kHz, but only 52 subcarriers are actually used for information transmission, four of them for the pilot. Thus, OFDM symbol duration is 8.0 µs, with the guard interval of 1.6 µs. The expansion of the protection interval means that 802.11p can tolerate greater delay expansion. As shown in Figure 1, preamble structure contains OFDM physical layer convergence protocol (PLCP) training sequences, signals of OFDM symbols, and data of OFDM symbols in 802.11p protocol. There are 12 PLCP training sequences including 10 short sequences and 2 long sequences. Each short sequence contains 12 nonzero subcarriers, usually used for coarse time estimation and frequency offset estimation, while long sequences are used for channel estimation and fine estimation. Obviously short preamble synchronization plays an import role in time estimation which can be expressed as


Preamble structure of IEEE 802.11p physical layer.
OFDM system model based on IEEE 802.11p
Considering an OFDM system, the baseband signal with inverse fast Fourier transform (IFFT) can be expressed as

where OFDM modulator fast Fourier transform (FFT) size
In time domain, the received signal has the form of

where

where

where
Proposed method
In this section, we proposed a multi-stage method to enhance timing estimation performance, wherein autocorrelation and cross-correlation are both used for time estimation metric, and then iterative update to mean absolute deviation (MAD) values is proposed to find the correct time offset.
Autocorrelation and cross-correlation reception technique
AB Awoseyila et al. 21 presented an autocorrelation and cross-correlation reception technique which is used for time synchronization in Rayleigh fading inter-symbol interference (ISI) channel. The proposed method is used to set the threshold parameters and cannot change the time estimation metric. In this article, the technique of cross-correlation based on autocorrelation is used for TOA estimation.
Autocorrelation method
First, the autocorrelation technique is introduced as follows and the modulation signal of OFDM is calculated. Typically, both SC method and MZB method employ this technique, as shown in Figure 2. In ideal environment, there are no noise and channel impulse responses where FFT length
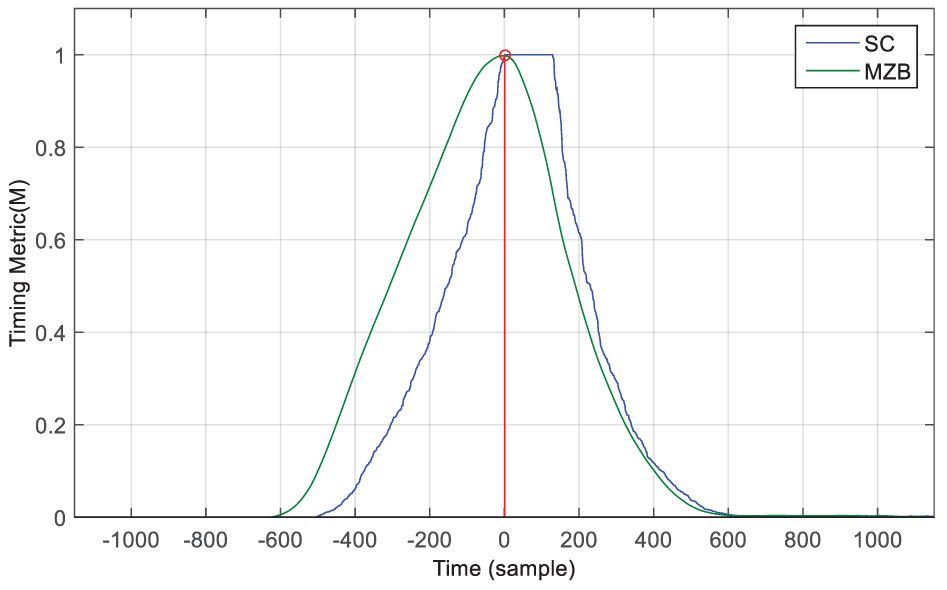
SC and MZB methods in ideal environment with
In order to improve the autocorrelation technique with lower complexity, AB Awoseyila et al. 21 used SC’s autocorrelation technique, and the SC training symbol with symmetric structure is demonstrated as

where N is the training symbol length. Therefore, autocorrelation results can be written as

In order to avoid the effect of platform in SC, Minn et al. improved this method using sliding window as shown in Figure 2, and then, the time estimation function could be formed as

Cross-correlation method
In AWGN channel environment, cross-correlation is a well-known reception method, and the performance is shown in Figure 3. When training samples are repeated once, five sharp impulses can be generated. Mathematically, the time metric is

where


Cross-correlation method in ideal environment with
The time metric

Autocorrelation and cross-correlation method (auto-cross)
According to the analyses above, the secondary focus is utilization of auto-cross to improve overall performance of the autocorrelation technique. Time function of the auto-cross is described as

In this work, the maximum value of

A preferred embodiment of improved auto-cross method is shown in Figure 4. From this figure, it is found that auto-cross method has one peak at the index of 0, which is just the location of correct timing estimation. However, there are repeated peaks of side lobe interference in Figure 3. The above comparison indicates that the auto-cross method can determine the timing delay using the repeated symbol.

Auto-cross method in ideal environment with
In this article, for the purpose of outstanding performance using proposed correlation method in the vehicle environment, short preamble is selected as the training symbol to verify the proposed TOA positioning method. Normally, the SP symbol is used for training matching template, so T is 16 in equation (9). All of these simulations use short preamble, and the time delay is set to 191 samples.
In Figure 5, the time metric

where
While in low Eb/N0 condition, taking Eb/N0 = 0 dB as an example, it is hard to select a proper threshold. Just as shown in Figure 6, if the threshold is set as max(Mopt)/3, the first peak exceeding TH is not the proper time delay. Thus, the above method cannot meet the requirement of accurate estimation in such environment.

Mopt with Eb/N0 = 30 dB in ideal environment.
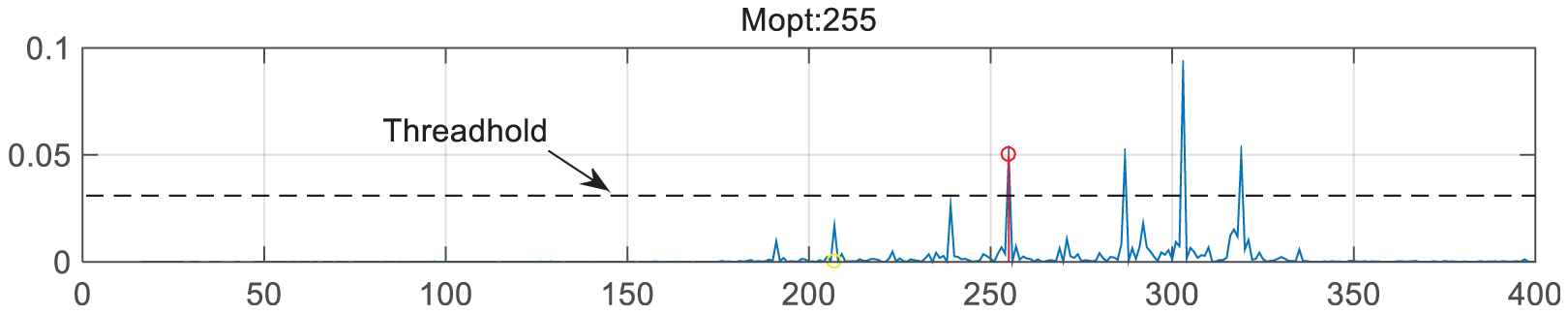
Mopt with Eb/N0 = 0 dB in AWGN channel.
Summation based on correlated result
In ideal environment as shown in Figure 5, nine peaks appeared, so the operation of summing is used to estimate the TOA. Considering that each neighboring peak has an interval of 16 samples, the timing metric can be written as

where L = 16, and then TOA estimation becomes

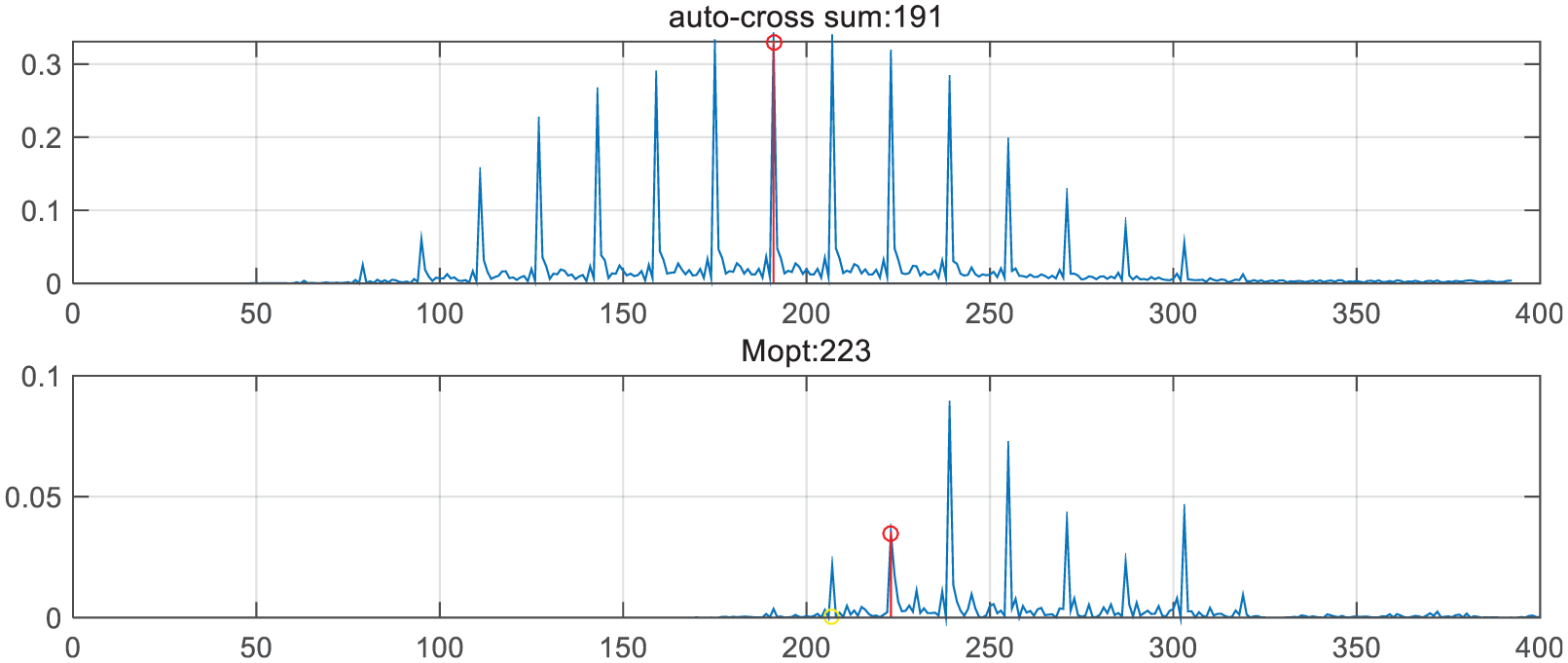
Considering Figure 7, when Eb/N0 = 0 dB, the method of summation can get the proper TOA very easily, so this method has a high accuracy (shown in the top line), which is much better than that of the non-summation method (shown in the bottom line). However, when Eb/N0 gets worse, for example, it is set to −5 dB and the peaks are not clear as before, so this method is not adequate to get proper TOA (Figure 8). Time offset estimate is 207 using summation operation as shown in Figure 9.
Summation with Eb/N0 = 0 dB in AWGN channel.

Summation with Eb/N0 = –5 dB in AWGN channel.

MadG with Eb/N0 = 30 dB.
Iteration of MAD based on summation
The key purpose addressed in this section is to improve the accuracy of timing estimation at low SNR, which mainly focuses on post-processing of the correlated and summation operation data. Inspired by Cui et al.’s
23
method, a new iteration, that is, MAD, is considered in this article. First, calculate the MADs of the


where
Compared with Figures 9 and 10, MAD results of index = 191 have the same characteristics of madG(1) > 0.9 and madG(11) = 0. In order to find the peak index that meets the requirement rapidly, a loop iteration method is used to find the final value and the specific process as shown in Figure 11. When the index cannot comply with the law that only madG(1) is 1 and madG(11) is 0, the value of

MadG with Eb/N0 = –5 dB.
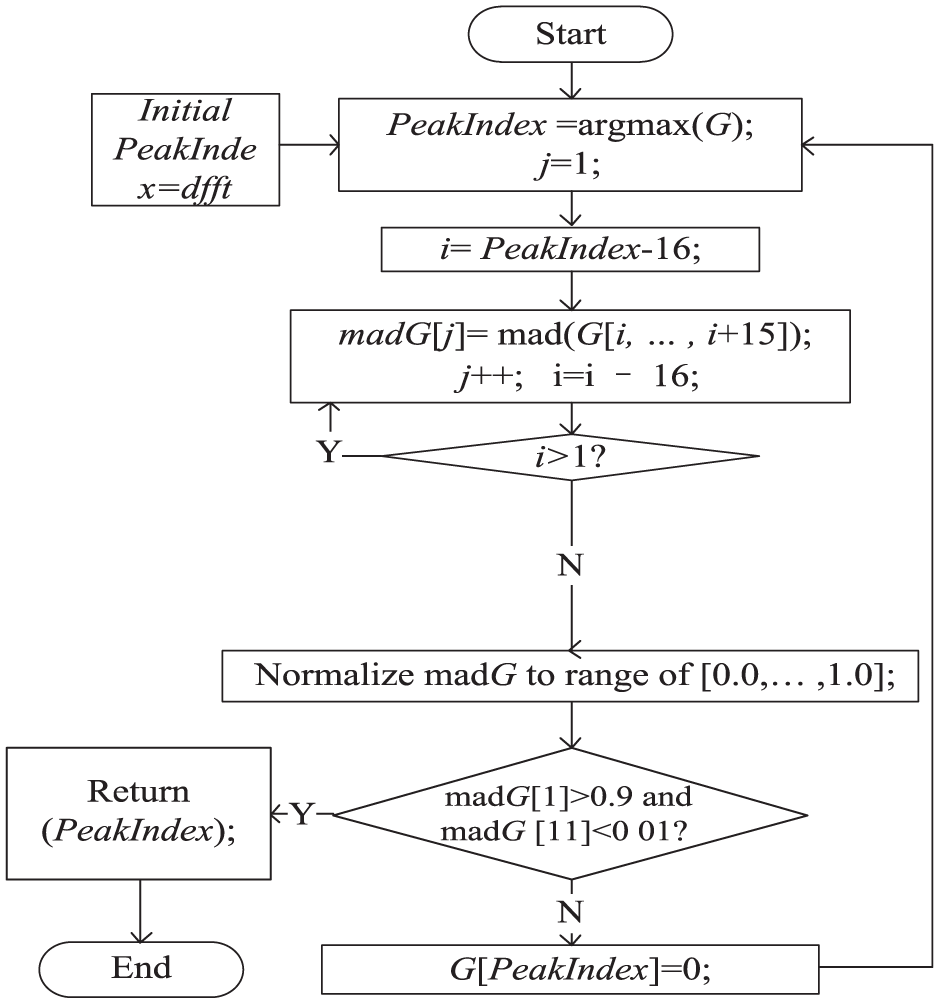
Flow chart of the MAD iteration.
Performance results and discussion
For the simulative evaluation of the proposed method in the MATLAB platform, Rayleigh channel with the ITUA Channel and AWGN environment are examined. The simulated parameters include running times K = 2000, values of Eb/N0 varying from −5 to 30 dB, and delay = 191. The performance efficiency using mean absolute error (MAE) of proposed method can be given as

where K is simulation iterations times,
Considering the correlation techniques used in this article, the proposed method is named as autocroMAD, and Awoseyila’s method is named as cross-correlation. Meanwhile, SC-32 (where L = 32) and MZB methods are also compared in the simulation.
Performance results and discussion in AWGN environment
Simulation results in AWGN channel are provided to validate our improved auto-cross with MAD algorithm. The MAE values of all compared methods are shown in Figure 12.
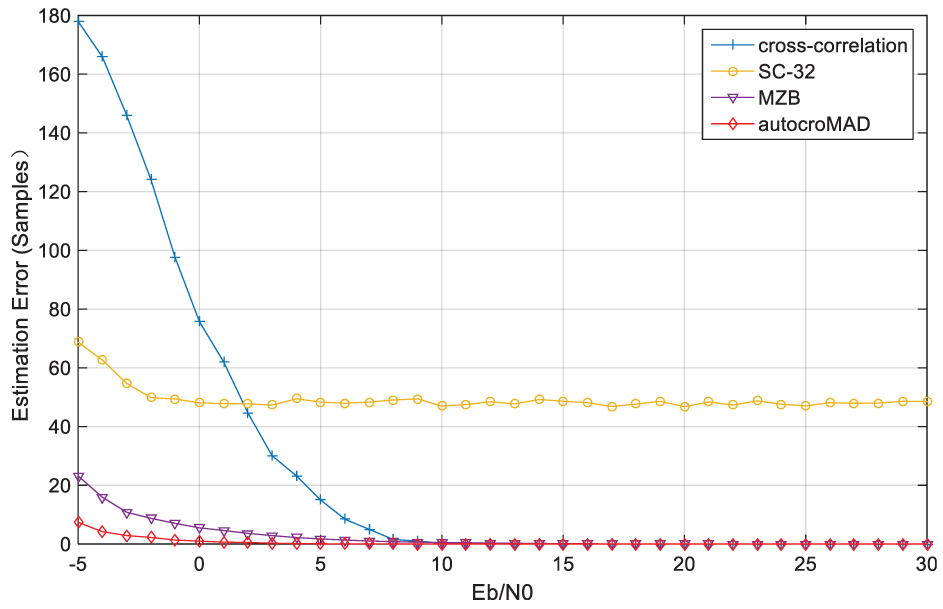
MAE values of different methods in AWGN channel.
As we can see, the proposed method autocroMAD has the lowest MAE values among the compared methods, especially in lower Eb/N0 environment. For instance, when Eb/N0 = –5 dB, the MAE approaches toward 8, and the best one is about 20 except for the proposed method. Accordingly, the proposed method is superior to other classic methods in MAE aspect.
In order to further verify the stability of the proposed method in AWGN environment, we depict the figure of percentage where estimation error is equal to 0, named P(0). From Figure 13, it is found that P(0) of the proposed method is significantly better than those of the other compared methods. Although when Eb/N0 = –5 dB, P(0) of the proposed method, autocroMAD, is about 62%, and as Eb/N0 increases to 0 dB, the proposed method performs its advantage.

Probability that the timing error is 0 in AWGN channel.
Consequently, the percentage of timing estimation error less than 3, named P(3), is simulated. As shown in Figure 14, when Eb/N0 = –5 dB, the percentage of our method is about 85%; those of other methods are less than 50%. Moreover, with Eb/N0 increasing, the P(3) is rising steadily, and when Eb/N0 = –5 dB, the percentage gets to 95%. In short, the proposed method offers particular advantages different from those of other traditional methods.

Probability that the timing error is less than three samples in AWGN channel.
From above simulations, the following conclusions are drawn:
In AWGN channel, MAE of the proposed method autocroMAD has the best results, particularly in low Eb/N0 condition.
The proposed method autocroMAD has the best stability performance than the classical methods in AWGN condition.
Performance results and discussion in international telecommunication union vehicular multipath environment A
In this simulation, the transmitted OFDM signal based on the 802.11p standard is used for modulation including short preambles, long preambles, and data under international telecommunication union channel impulse response. Considering the computational complexity, only the short preamble is used as the correlation template. Meanwhile, the sampling frequency is set to 10e6, that is to say, each sample time is 0.1 µs. ITUA channel is an ISI multipath channel with medium level of delay spread. Table 1 illustrates the detailed simulation parameters that are taken in account for our simulation of ITUA channel. To assess the superiority of our method in ITUA channel, the MAE, P(0), and P(3) are obtained.
ITUA channel parameters.

ITUA: international telecommunication union vehicle A.
Figure 15 describes the MAE of tendency over different values of Eb/N0, and it is clear that MAE values of the proposed method approach the ideal result 0 in the entire range.
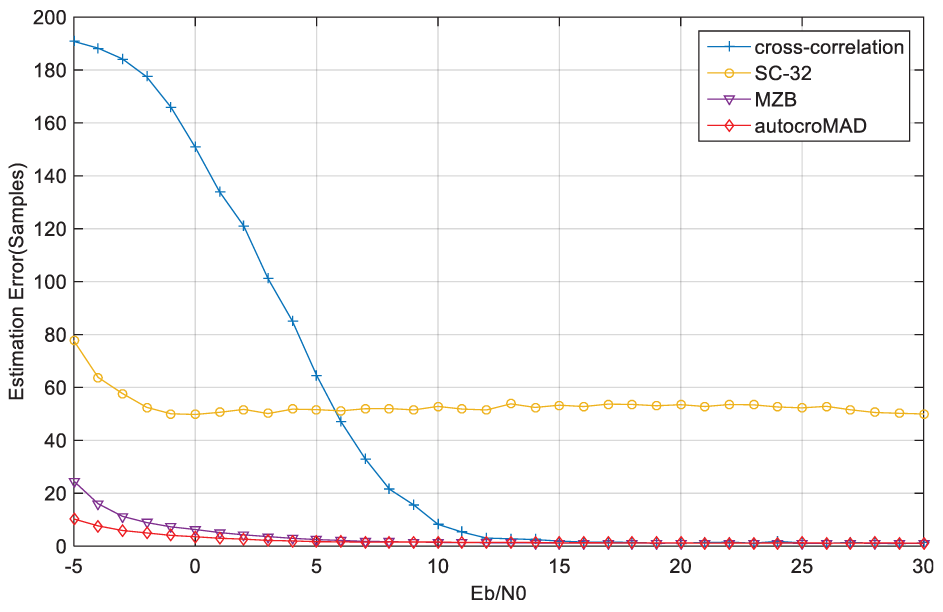
MAE of different methods in ITUA.
Figure 16 illustrates that for low Eb/N0, the percentage of correct estimation (P(0)) keeps upward trend. Also, P(0) is up to 60% when Eb/N0 = 0 dB, and then tends to level off. However, when Eb/N0 = 10 dB, the Awoseyila’s cross-correlation method has best performance.
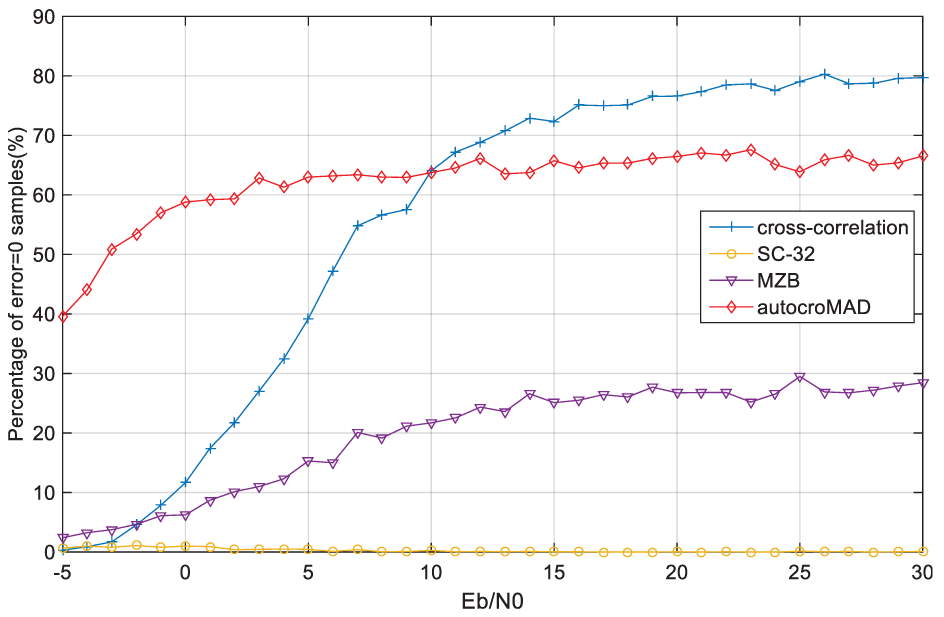
Probability that the timing error is 0 in ITUA.
Figure 17 depicts P(3) for the four methods in the ITUA channel. Results indicate that when Eb/N0 is low, like −5 dB, the proposed method has the best performance and can reach nearly 50%, which is far superior to other methods. In addition, the proposed method can reach nearly 80% at the Eb/N0 of 0 dB. However, for the other methods, they need higher Eb/N0 to reach the same error percentage, for example, the P(3) of MZB method reaches 80% at almost 6 dB.

Probability that the timing error is less than 3 in ITUA.
In a word, the proposed method has the better performance than other compared methods in ITUA channel, especially in low SNR.
Conclusion
In this article, a novel vehicular node positioning method is proposed, which uses the short preamble based on IEEE802.11p wireless communication. Simulation results of classical methods and the proposed method based on auto-cross added MAD in AWGN and multipath ITUA channel environment are analyzed. Results show that throughout the Eb/N0 range from −5 to 30 dB, the proposed technique achieves a superior performance than the compared methods, wherein its timing mean square error (MSE) is almost close to the ideal value of zero. Furthermore, in multipath condition, P(0) of the proposed throughout the Eb/N0 range from 10 to 30 dB is not better than cross-correlation method, but compared with the existing methods, P(3) of proposed method is still the highest.
Footnotes
Handling Editor: Shancang Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to thank National Natural Science Foundation of China (No. 61671482, 61872385, and 61601519) for support in this work. Also, the authors would express the gratitude to Fundamental Research Funds for the Central Universities (17CX02042A and 18CX02136A) in this report.