
Abstract
Developing a secure and smart intelligent transport system for both safety and non-safety application services requires a certain guarantee of network performance, especially in terms of throughput and packet collision performance. The vehicular ad hoc network propagation is strongly affected due to varying nature of the environment. The existing radio propagation path loss models are designed by using mean additional attenuation sophisticated fading models. However, these models do not consider the obstacle caused due to the obstacle of the vehicle in line of sight of the transmitting and receiving vehicle. Thus, the attenuation signal at the receiving vehicles/devices is affected. To address this issue, we present an obstacle-based radio propagation model that considers the effect caused due to the presence of obstructing vehicle in line of sight. This model is evaluated under different environmental conditions (i.e. city, highway, and rural) by varying the speed of vehicles and vehicles’ density. The performance of the model is evaluated in terms of throughput, collision, transmission efficiency, and packet delivery ratio. The overall result shows that the proposed obstacle-based throughput model is efficient considering varied speed and density. For instance, in the city environment, the model achieves an average improvement of 9.98% and 25.02% for throughput performance over other environments by varying the speed and density of devices respectively and an improvement of 15.04% for packet delivery ratio performance over other environments considering varied speed of devices.
Keywords
Introduction
In vehicular ad hoc network (Vanet), different environments have different characteristics, that is, the city, highway, and rural (CHR) areas. A city consists of high-rise and low-rise buildings, high vehicular density and varied speeds, and so on. Highway consists of high mobility, high speed of vehicles, the presence of Doppler spreads, and so on, while in the rural area, some regions are highly dense and congested and some are not, besides the presence of building and so on.
Developing a secure and smart intelligent transport system (SSITS) for both safety and non-safety application services needs a specific guarantee of network performance, mostly in terms of throughput and packet collision performance. Vanet has gained wide interest across various segments such as government, industries, and academic organizations. The recent advancement in communication technology has led to the development of an SSITS.1,2 SSITS in Vanet provides support to both safety-related applications such as traffic management and collision detection and to non-safety-related applications such as accessing the high-speed Internet for various infotainment application purposes. Vanet-based communication is broadly classified as vehicle to infrastructure (V2I) and vehicle to vehicle (V2V) communication as shows in Figure 1. In V2V communication, all vehicles can communicate with each other. Each vehicle is equipped with an on-board unit (OBU) which is used to do all computation and communication tasks and also to enable short-range wireless ad hoc network to be formed between vehicles. The goal of V2V communication is to increase the communication range of vehicle for providing more real-time information to the subscribed user. In the second type, V2I or vehicle to roadside (V2R) communication, the data transfer happens between a vehicular node and a network infrastructure (i.e. base station or a roadside unit (RSU)). RSUs are put on the road for infrastructure communication. This V2I communication induces high cost of deployment over V2V considering different environments such as suburban, highway, and rural areas. V2V communication is expected to aid the user in detecting and reducing 70%–80% of collisions or accidents. 3 The communications between V2V and V2I are displaced out via the dedicated short-range communication (DSRC) standard, so each RSU and OBU uses a DSRC based on IEEE 802.11p (i.e. the communication standard of Vanet) to enter the wireless channel.

Architecture of vehicular ad hoc communication.
Channel modeling plays a significant role in improving the performance of Vanet V2V communication network.4,5 The future SSITS safety and non-safety application systems need to consider the environmental channel characteristics such as suburban, highway, and rural. Therefore, it is important to model an efficient and accurate channel that considers the random and time-varying nature of each environment. An accurate radio model will aid in developing an efficient Vanet communication model.
6
Channel modeling is also considered as the most important factor in Vanet V2V propagation channel due to the challenges of its characteristics which exist in the mobility nature of both Vanet vehicles/devices terminals, that is, sender
Vehicular channel modeling is broadly classified into three classes.12,13 A stochastic model is a method in which the radio channel propagation is designed by adopting statistic or analytical technique by computing channel equalization and estimation. The stochastic model is adopted across various simulation tools 14 due to its low computation requirement. However, this approach is not practical, since it requires information of environmental channel characteristics. To evaluate the radio characteristics of different environments, the deterministic model adopts three-dimensional (3D) ray-tracing technique. This model improves the accuracy at the cost of increased computational complexity. Finally, the geometry-based model adopts an empirical and analytical approach to model the radio propagation characteristics such as small and large fading. This model provides a tradeoff between accuracy and computational complexity. In Boban et al., 15 a model is presented to address the effect of line of sight (LOS) and non–line of sight (NLOS). However, the model in Boban et al. 15 used real maps, and no mathematical model is presented. Moreover, different environmental conditions were not considered.
The main medium between transmitter and receiver is the radio channel in all wireless communication types. Through different paths, the signal is propagated between transmitter and receiver. It can be either LOS paths, where the signal travels over a direct and unobstructed path between two transceivers, or NLOS path, where the signal travels from the transmitter and reaches the receiver with the presence of obstacles such as buildings, trees, and walls that affect the signal’s strength. During its entire itinerary, the signal can suffer from reflections, scattering, and diffractions. In this medium, these are the only factors that can affect the multipath communication and have a huge impact on the propagation of the Vanets.
Most of the existing channel models presented so far are on the cellular network and are not applicable to the V2V network. These models adopt mean additional attenuation sophisticated obstacle-fading models such as Nakagami
16
and log-normal. However, these models do not consider the effects of the vehicle in modeling LOS among transmitter and receiver. In other words, they do not consider a vehicle between the transceiver as an obstacle. In fact, the presence of an obstacle between a transmitter and a receiver affects the signal attenuation, especially at the receiver side. Furthermore, their models do not consider the evaluation under different environmental conditions such as CHR areas. The issues existing in the LOS were considered as an important case study in the research work.
17
The study of Paier et al.
17
shows that because of the presence of LOS components such as reflection or diffraction, the amplification of signal or power is required. Accordingly, a new radio propagation path loss model is required to validate the network under different environmental conditions in the presence of LOS. This work considers vehicle as an obstacle between LOS among transmitter and receiver which is shown in Figure 1. The LOS distance between transmitter and receiver without the presence of an obstacle is represented by
Therefore, the contribution of our article consists of (a) considering the vehicle between a transmitter and a receiver as an obstacle, (b) proposing a new radio propagation path loss model that computes the signal attenuation required for transmission between transmitter and receiver with the presence of multiple obstacles in LOS, and (c) validating the network under different environmental conditions (i.e. CHR areas).
The organization of this article is structured as follows. Section “Literature review” describes the related work carried out so far to improve the performance of Vanet in the presence of an obstacle. The proposed obstacle which is based on radio propagation CHR path loss model is presented in section “Proposed CHR model.” Simulation and experimental studies are presented in section “Simulation result and analysis.” The last section concludes the article and outlines future work.
Literature review
He et al. 18 presented a survey of the existing model that considers the obstruction of buildings and vehicles to design an efficient and accurate radio propagation channel model for various environmental conditions such as CHR. These methods adopt stochastic, deterministic and geometry-based techniques to model a Vanet channel.
A number of studies have been presented to investigate the impact of signals received due to the obstruction caused by buildings. Durgin et al. 19 presented a path loss model for the indoor and outdoor environment in the presence of plantation for a residential environment. A similar approach for the urban environment is presented by Giordano et al. 20 to improve accuracy and reduce computational complexity. The research work of Karedal et al. 21 showed how the received power and multiple propagation paths at the receiver are affected due to the obstruction of buildings. Sommer et al. 22 presented a solution to address the stochastic modeling and ray tracing to capture the shadowing effect caused by the obstruction of buildings. However, their model is computationally very intense and is difficult to implement due to its complex design.
Boban et al. 23 proposed an analysis to study the impact caused by the obstructing vehicle between the transmitter and receiver. They studied the impact of propagation signal and LOS at different times of a day under distinct environmental conditions. Similar work was conducted by Meireles et al., 24 but their models adopted an analytical design and geometry-based model using the 3D image of the vehicle as a LOS obstruction. Nevertheless, these models are computationally very intense. Moreover, they considered that NLOS affects the attenuated signal due to obstructing vehicle at the receiver end, and as the distance increases the probability density ratio (PDR) decreases at the transmitter and increases at the receiver end.
Many existing studies have considered a wave propagating through a rooftop. For instance, Wang et al. 25 studied the impact of door-edges on attenuation path. For this, a three-way shadowing model is required. So, they adopted a three-way knife-edge model to analyze the impact of shadowing on V2V communication. The outcome obtained by this model shows that the shadowing effect decreases the transmission efficiency among V2V devices by around 40%, and when the speed is slow, it tends to further degrade the transmission’s performance.
These studies focused on addressing largescale fading, while they addressed only very little small-scale fading and they did not consider different environmental conditions. To overcome the limitation of the existing approaches, in this article, we present a radio propagation model considering the obstacle due to the vehicle between transceivers under different environmental conditions.
Proposed CHR model
In this section, we propose a radio propagation and environmental channel modeling for Vanet V2V network. Also, we present a realistic channel modeling for CHR environments. Our radio propagation model considers the presence of an obstacle between transceiver devices. Here, we consider only the adjacent vehicle as the impact causing the obstacle, since considering another obstacle will lead to a reduction in the likelihood of LOS among the transceiver. We also present a distributed medium access control (MAC) design for achieving better slot utilization. Finally, experiments are conducted to evaluate the performance of our model considering different network parameters.
First, let us consider CHR model that consists of a set of vehicles which are in coverage range of each other as shown in Figure 2.

Obstacle-based CHR model.
The notations used in this article are given in Table 1.
Variable notation.
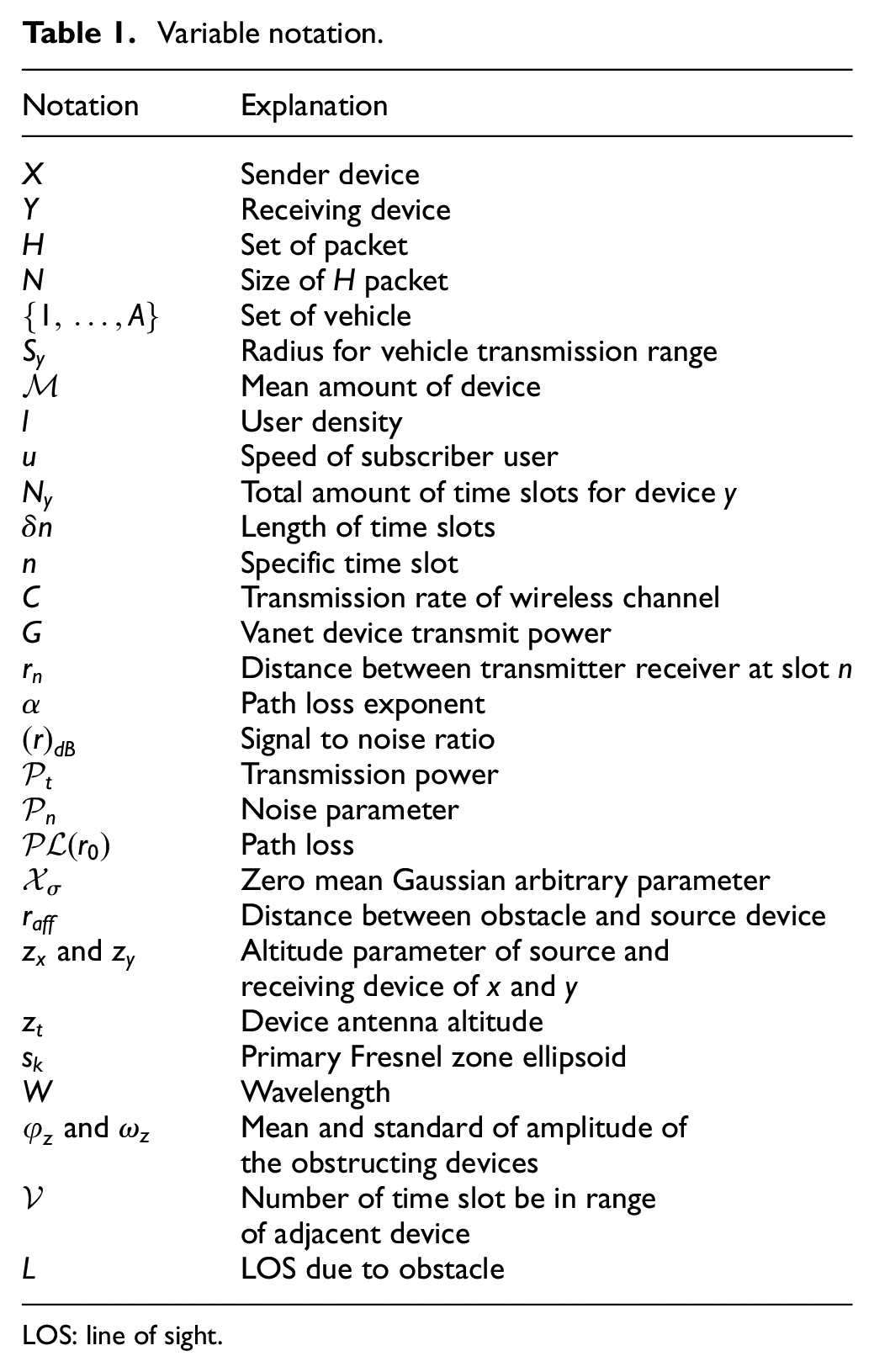
LOS: line of sight.
Let us consider that a subscribed vehicle transmits a set of packets
Let us consider that

The speed of

Where
Let us consider that the Vanet devices move at the speed

Here, we consider a distributed slotted MAC, where the time is divided into the equal length of slot

where

The wireless channel signal propagation is affected by various factors such as fading, shadowing, and path loss, since the distance between the transmitter and the receiver varies based on the CHR environment model. Let us consider the path loss impact on channel attenuation. The data transmission rate at slot

where

where
Here, we consider the LOS based on CHR environment channel modeling. The model by Boban et al.
23
combines the obstacle effect of environmental factors such as buildings, trees, or walls that affect the signal strength received. Using traditional mean additional attenuation model will lead to stochastic obstacle-fading model. In this article, we consider adjacent devices or vehicles as the impact causing the obstacle, since considering another obstacle will decrease the likelihood of LOS among the source and receiving devices. Accordingly, the proposed modeling consists of three stages. First, the device that probably affects the transmission of LOS among source

where

where

where
Third, the amplification of attenuation required for the signal power received is computed for LOS of the obstructing device in the previous iteration and is obtained using

Flow diagram of the obstacle proposed based on CHR environmental channel modeling.
Simulation result and analysis
The experiments are conducted on Windows 10, 64-bit I-5 Quad-Core processor with 16 GB RAM. The SIMIT simulator is used to evaluate the performance of the proposed model under different environmental conditions. The new obstacle-based radio propagation for CHR environmental channel model and the distributed MAC are both incorporated into the simulator. For the evaluation, distributed slotted MAC is considered and the proposed model is evaluated in terms of throughput, collision, packet transmission, and packet delivery ratio under different environmental conditions. To further evaluate the robustness of the proposed model, the throughput and collision performances are evaluated by varying the number of devices and mobility speed of vehicles under different environmental conditions. For modeling and simulating the environmental conditions of CHR areas, we considered the parameters presented by Bazzi et al. 27 These environmental parameters are shown in Table 2 and have been obtained from a set of tests on IEEE 802.11p (5.9 GHz). This setup allows our model to achieve idealistic channel configuration.
Channel parameters for different environments used for simulation. 27

We consider in the three environments, the adjacent vehicles among LOS between transmitter and receiver as an obstacle in our model. The network parameters considered in the simulation are presented in Table 3.
Network parameters considered for simulation.

First, we evaluated the proposed model under different environmental conditions considering 40 devices that are moving at a speed of 3 m/s.
Figure 4 shows the throughput performance. The outcome indicates that the throughput achieved for the rural environment is low compared to other environments and the throughput obtained for city environment is higher than the other environments. The throughput achieved in highway environment tends to be closer to city environment, since there are fewer obstacles compared to the city environment.

Throughput achieved in different environments.
Figure 5 depicts the collision performance. The outcome shows that the collision achieved for city environment is low compared to other environments, and the collision achieved for the rural environment is higher than the other environments.

Collision achieved in different environments.
Figure 6 illustrates the transmission performance. The outcome indicates that the packet transmission achieved for the rural environment is low compared to other environments and packet transmission obtained for city environment is higher than the other environments. The packet transmission achieved in highway environment tends to be closer to city environment, since there are fewer obstacles compared to the city environment.

Transmission performance in different environments.
In order to evaluate the robustness of the proposed model, several simulations are conducted by varying the number of devices between 20, 40, and 60 that are moving at a speed of 3 m/s. Figures 7 and 8 shows the results under different environmental conditions for a varied number of devices.

Throughput performance for a varied number of devices under different environmental conditions.

Collision performance for a varied number of devices under different environmental conditions.
Figure 7 shows the throughput performance. The outcome shows that the throughput achieved for the rural environment is low compared to other environments and for city environment is higher than the other environments. It is clear from the graph that the throughput increases as the number of vehicles increases, since more channels are available for transmission.
Figure 8 describes the collision performance. The outcome shows that the collision achieved for city environment is low compared to other environments, while for the rural environment is higher than the other environments. According to the graph, as the number of devices increases, the number of collisions increases due to channel contention.
In order to further evaluate the robustness of the proposed model, multiple simulations are conducted by varying the speed of devices from 4, 6, and 8 m/s, while the number of devices is fixed to 20. Figures 9 and 10 depict the results of the experiments conducted under different environmental conditions for a varied speed of devices. Figure 9 depicts the throughput. The outcome indicates that the throughput achieved for the rural environment is low compared to other environments and for city environment is higher than the other environments. It can clearly be seen in the graph that the throughput decreases as the speed of vehicle increases.

Throughput performance for varied speed under different environmental conditions.

Collision performance for varied speed under different environmental conditions.
Figure 10 shows the collision performance. The outcome indicates that the collision achieved for city environment is low compared to other environments and for the rural environment is higher than other environments. We can see from the graph that as the speed of devices increases, the number of collisions increases.
The proposed obstacle-based CHR radio propagation model that bears the closest similarity to our work is used for comparisons in the experimental study presented here. The comparison of the obstacle-based CHR radio propagation model with its counterparts is summarized in Table 4. Accordingly, it is shown that the models by Ferreira and Fonseca 28 and Bilgin and Gungor 29 do not consider the presence of an obstacle in LOS between transceiver. As a result, it affects the packet delivery performance. Ferreira and Fonseca 28 evaluated the packet delivery performance considering different environments. However, they did not consider varying the number of devices and vehicle mobility in their experiments. Bilgin and Gungor 29 conducted the experimental analysis considering varied mobility speed to evaluate collision performance. However, the performance evaluation under different environmental condition was not considered. Our model considers performance evaluation considering throughput, collision, successful transmission, and packet delivery ratio considering a varied number of devices, varied speed, and varied environmental conditions. The overall survey shows the efficiency of our model over state-of-the-art techniques.28,29
Comparison with state-of-the-art techniques.
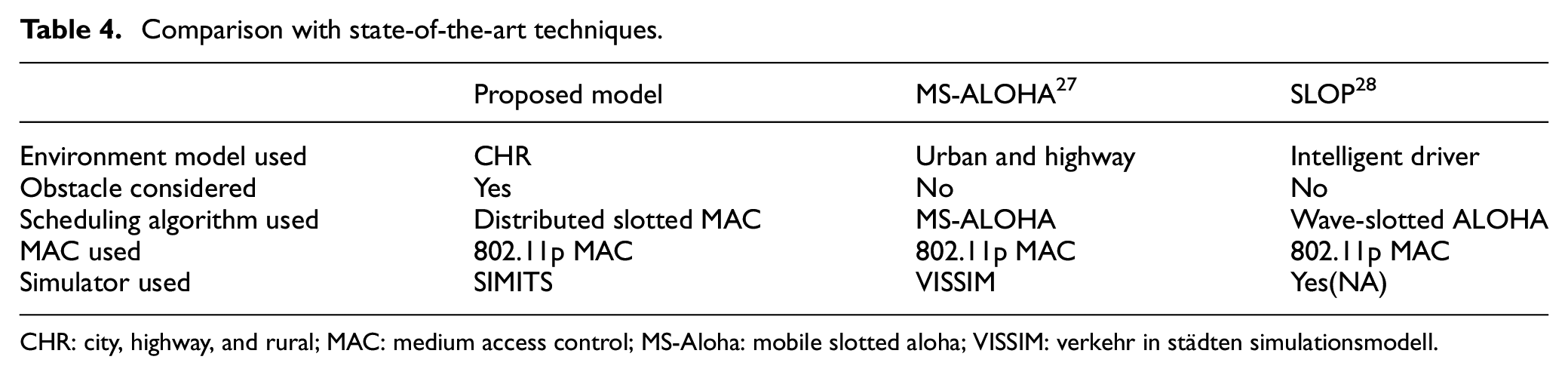
CHR: city, highway, and rural; MAC: medium access control; MS-Aloha: mobile slotted aloha; VISSIM: verkehr in städten simulationsmodell.
Discussion
The models presented so far for V2V network adopts mean additional attenuation sophisticated obstacle-fading model such as Nakagami 16 and log-normal. These models do not consider the effects of a vehicle in modeling the LOS among the transmitter and receiver, while in fact the signal attenuation can be affected by the diffraction that depends on the obstruction level, the carrier frequency, the shape of the obstruction, and the amount of the obstruction in the path between the sender and the receiver and also can be affected by the presence of an obstacle between the transmitter and receiver. Moreover, those models do not consider the evaluation under different environmental conditions such as CHR.
With the presence of LOS components (such as reflection or diffraction obstacles), an amplification of signal or power is strongly required. 17 This indicates that a new radio propagation path loss model is needed to validate the network in the presence of LOS obstacles.
To address the aforementioned issues, a new radio propagation path loss model is proposed. The model considers the vehicle between a transmitter and a receiver an obstacle and computes the signal attenuation required for the transmission between the transmitter and receiver with the presence of multiple obstacles in LOS. The model uses a distributed slotted MAC and a designed obstacle-based radio propagation.
In this model, each vehicle can communicate with each other if they are in the same region. Hop transmission is done if the vehicle from one region wants to communicate with another vehicle in another region. For instance, if a vehicle x in region 1 wants to communicate with the vehicle in region 2, vehicle x transmits to vehicle y and then vehicle y forwards the message to the intended vehicle in region 2.
The proposed obstacle-based throughput model is validated under different environmental conditions (i.e. CHR area). The result shows that the model is efficient considering varied speed and density. For instance, in the city environment, the model achieves an average improvement of 9.98% and 25.02% for throughput performance over other environments by varying the speed and density of vehicles respectively and an improvement of 15.04% for packet delivery ratio performance over other environments considering varied speed of vehicles. In addition, the model reduces the overhead in computing LOS which is necessary for a practical implementation.
However, we consider that the collision obtained with the proposed model is still high. The model should further consider reducing collision. Reducing collision will further aid in improving better slot usage (throughput). It is necessary in order to provide a real-time secure and smart transport system (V2V communication).
Three future researches are needed to enhance the applicability of the proposed model. First, a development of an adaptive MAC that incorporates the proposed channel model is required to increase the throughput and reduce the collision and achieve a better performance. Second, a comparison between the performance of the proposed model with the performances of the existing models is recommended. Finally, a field study is needed to validate the results of this study with a real-world use case.
Conclusion
In this article, a channel characterization outcome of DSRC 802.11p for V2V communication under different environmental conditions is presented. Moreover, a CHR obstacle-based radio propagation channel model is proposed. The approach has been evaluated under CHR environments in terms of throughput efficiency, collision, and transmission performance under distributed slotted MAC. The performance of the proposed model is further evaluated by varying the speed and number of vehicles. The outcome achieved shows that the proposed model is robust considering varied environmental conditions and varied speed and density.
Certainly, there are still many open issues and challenges that exist in V2V communication that need to be considered in further research. The dynamic nature of Vanet applications requires an efficient MAC design. Therefore, future work would consider developing an adaptive MAC and incorporating the proposed channel model into the adaptive MAC for better performances and also validating the model with a real-world use case.
Footnotes
Handling Editor: Paolo Bellavista
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science, and Technology (grant number: NRF-2016R1D1A1B01011908). And it was also supported by the Technological Innovation R&D Program (Assignment number: S2457495) funded by the Small and Medium Business Administration (SMBA, Korea).