
Abstract
Background:
Persons with dementia are at risk of a missing incident, which is defined as an instance in which a demented person’s whereabouts are unknown to the caregiver and the individual is not in an expected location. Since it is critical to determine the missing person’s location as quickly as possible, we evaluated whether commercially available tracking technologies can assist in a rapid recovery.
Methods:
This study examined 7 commercially available tracking devices: 3 radio frequency (RF) based and 4 global positioning system (GPS) based, employing realistic tracking scenarios. Outcome measures were time to discovery and degree of deviation from a straight intercept course.
Results/Conclusion:
Across all scenarios tested, GPS devices were found to be approximately twice as efficient as the RF devices in locating a “missing person.” While the RF devices showed reasonable performance at close proximity, the GPS devices were found to be more appropriate overall for tracking/locating missing persons over unknown and larger distances.
Introduction
The world population of persons with dementia is expanding rapidly. An estimated 5.2 million Americans had Alzheimer’s disease in 2013, the most common type of dementia, with the prevalence increasing with increasing age. Of those with Alzheimer’s disease, an estimated 4% are under age 65, 13% are 65 to 74, 44% are 75 to 84, and 38% are 85 or older. 1
A missing incident for a person with dementia (PWD) is defined as an instance in which PWD’s whereabouts are unknown to the caregiver because the individual is not in an expected location. 2 Majority of PWDs will have at least one missing incident during the course of their disease. 3 One longitudinal study reported the incidence for Veterans with dementia to be 0.46 incidents/year. 4 Although injuries and death are surprisingly rare, 5 missing incidents have other consequences including earlier institutional placement for the PWD, high stress, and increased vigilance for the caregiver and an increase in law enforcement and search resources for the community. 4,6 –8
Using technology to track and recover missing PWDs has become more commonplace as new methods have been introduced. Both, global positioning system (GPS)-based and radio frequency (RF)-based technologies are commercially available for locating PWDs. The GPS technology relies on multiple geostationary satellites emitting precisely timed signals, which are received by mobile tracking devices and cellular telephones. The receiver triangulates its position from the incoming data generated by a minimum of 4 satellites, with the accuracy of the fix enhanced by additional satellites. Obstructions separating the receiver from the satellites (including cloud cover) can degrade the quality of the fix; a principle drawback of GPS. The main advantage of GPS is that it is a worldwide system, with a “range” that virtually spans the globe. In contrast, RF technology devices utilize an RF transmitter worn by the missing person and an RF receiver with a directional antenna carried by the locator. The antenna gathers the transmitter’s signal and calculates the direction and range to the transmitter, an approach that involves an inherent amount of trial and error.
Many tracking/locating devices employ these technologies and are available on the consumer market. The goal of our investigation was to determine which tracking/locating technology was best suited to a particular “missing incident” situation.
Methods
We searched online to find the devices available on the market at the time of study start and selected 4 devices from each category (4 GPS/4 Radio-Frequency IDentification [RFID]) based on the available budget. We selected devices that could be purchased without recurring charges and were intended to be used by the caregiver. Before we started the testing, 1 RFID manufacturer discontinued production and we decided not to test that device, as it was no longer available on the market.
Devices Tested
We evaluated 3 RF devices: the Brickhouse Child Locator (BCL), CareTrak (CT) and WanderCare (WC), and 4 GPS tracking devices: SparkNano, PT-XS, Birdseye, and P-trac devices.
Procedures
The distinct operating characteristics and ranges of RF and GPS devices were not conducive to testing both types of devices under the identical protocol. For RF devices, the distance between transmitter and receiver is critical, because the transmitter’s range is finite. GPS devices work in concert with the local telecommunications grid to convey the tracked device’s location to the receiver, thereby providing global coverage; a PWD in a missing incident might literally be tracked/located by a receiver in another country. Furthermore, the three RF devices chosen for testing were found to have different signal characteristics and different operational specifications. We addressed these limitations by first establishing the maximum range for each RF device under a best-case scenario—maximum open field range (MOFR). MOFR was determined for each RF device by establishing the maximum distance at which the receiver obtained a reliable signal in an unobstructed field under line of sight conditions. This distance represented the maximum operating range under optimal conditions. The signal detection threshold was established 3 times for each device and the average calculated distance was the MOFR for that device. RF devices were not expected to be effective beyond their MOFR, especially in settings where obstacles can reflect and absorb RF, thus reducing their ranges, so tracking/locating trials were designed to test the RF devices within their MOFRs.
Tracking/locating trials were designed to evaluate devices in realistic scenarios. The settings varied from “open,” “wooded,” to “urban.” The open setting was a large playing field with no physical obstructions. The wooded setting was a state park characterized by dense trees and vegetation, with walking trails throughout. Two different urban settings were used in this study—1 for RF devices and 1 for GPS devices. The 2 separate urban settings were selected for logistical reasons. The RF devices were tested at a large outdoor shopping center with many three-story buildings, low traffic walkways, and streets throughout. The GPS devices were tested on a large college campus having many buildings but without the hazards of automobile traffic and busy roads.
The initial distance from the transmitter to the receiver for the RF devices was tested at 100% of MOFR and 50% of MOFR. The initial distance for GPS devices was held constant at 0.402 km (0.25 miles) since GPS devices would be expected to perform equally well at any distance, provided sufficient satellite coverage existed. Each trial was defined by the combination of setting (3) and initial distance (100% MOFR, 50% MOFR, or .402 km), and was repeated 3 times to provide an average rating for each device. This approach resulted in 90 tracking/locating trials in all, 54 for the RF devices and 36 for the GPS devices. The devices and starting distances were randomized for each trial within each setting.
The measures gathered included the time to discovery (raw and normalized by starting distance), GPS path location data generated by the locator/searcher, as they sought the source of the signal, and qualitative assessments by the research team members concerning each device’s ease of use. A key question in this research project was the degree to which each technology would lead a locator directly to the signal’s source or would result in a more tortuous route involving false turns and potential dead ends leading away from the target. In order to assess tortuosity, fractal dimension (FD) was used to quantify the straightness of the locator’s path in locating the signal source. The FD is a mathematical characteristic of any path and ranges from 1 (perfectly straight) to a maximum of 2 (a drunkard’s walk). Hence a direct path taken from point A to point B yields an FD of 1. Alternatively, if the path from A to B is greatly winding and inefficient, the FD will approximate a value of 2.
Two research team members played the roles of “missing person” and locator, respectively, in the trials, and the roles were not interchangeable. The missing person positioned themselves at the proper setting/distance combination according to the randomized list of trial orders. Once the missing person was in position, they notified the locator via cell phone to initiate the trial. The locator began collecting their position data using the GPS data logger, and the missing person would start their stopwatch. The locator would then employ the device to find the missing person, relying solely on information from the device. The locator relied solely on the device to bring them within approximately 5 meters of the missing person at which point the trial ended and data collection terminated. Alternatively, trials were terminated as a failure if the missing person was not found within 30 minutes.
Results
We compared the measured MOFRs of each RF device to those claimed by their manufacturers. While not every manufacturer detailed their testing procedure for determining upper performance limits, the 2 that did do so, described an open setting free of obstructions, similar to that used in this study. The measured MOFRs ranged from 496 to 899 ft, while the claimed ranges varied from 600 ft to “up to 1 mile.” The device with the lowest MOFR (CareTrak) was the same device that claimed to perform up to 1 mile.
Time to Discovery Data
In tracking trials, the missing person was found within the 25-minute cutoff window in all, but 1 RF and 1 GPS device trial. The time to discovery is a very important measure, as this is what users ultimately aim to minimize by employing tracking devices. But these numbers must be adjusted to reflect the distance that had to be covered by the tracker in locating the missing person since all tracking trials did not have the same starting distance. Normalizing time to discovery by initial starting distance for each trial properly adjusted for this. The units of these normalized results are time per distance and can be thought of as the time required to close in a specified distance on the missing person. Considering the normalized results, the GPS devices are about twice as time-effective in locating the wanderer as the RF devices (see Tables 1 and 2).
Mean Time to Discovery in Minutes for RF Devices.a
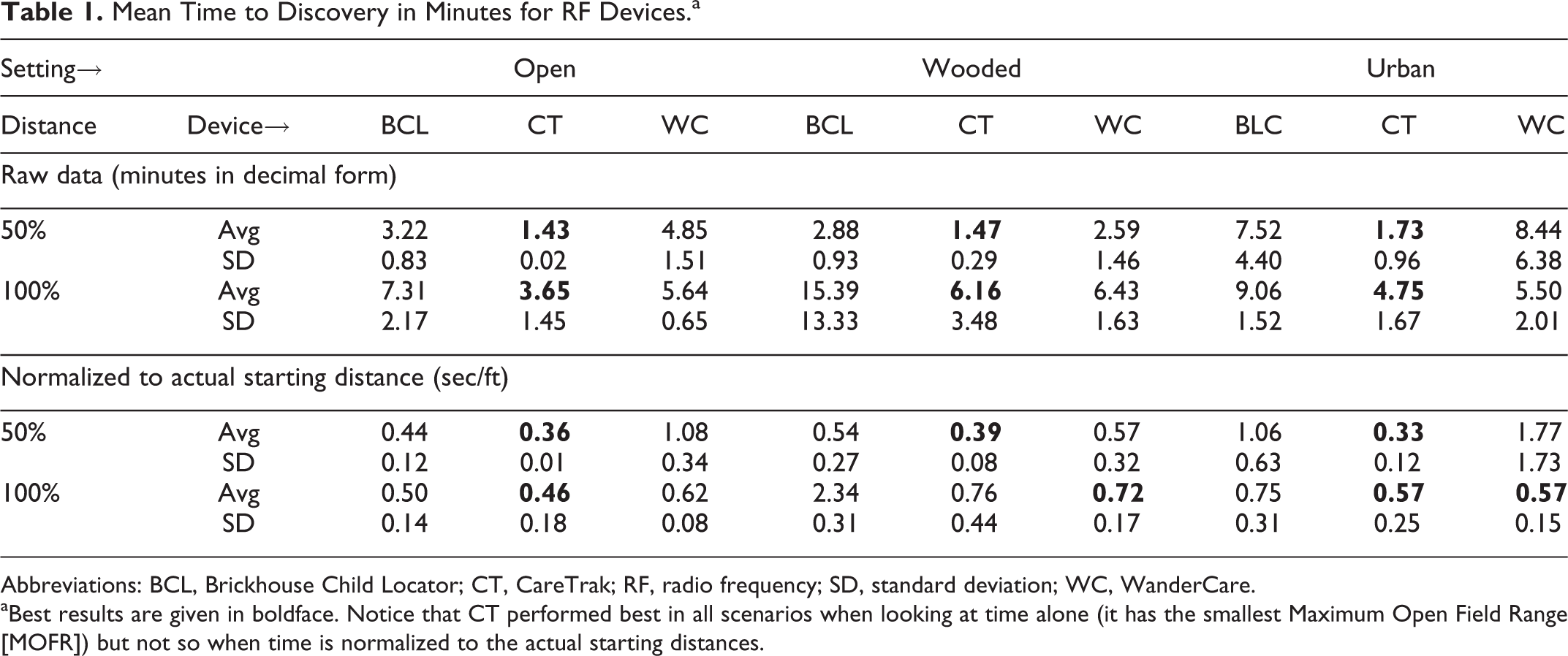
Abbreviations: BCL, Brickhouse Child Locator; CT, CareTrak; RF, radio frequency; SD, standard deviation; WC, WanderCare.
aBest results are given in boldface. Notice that CT performed best in all scenarios when looking at time alone (it has the smallest Maximum Open Field Range [MOFR]) but not so when time is normalized to the actual starting distances.
Mean Time to Discovery in Minutes for GPS Devices.a
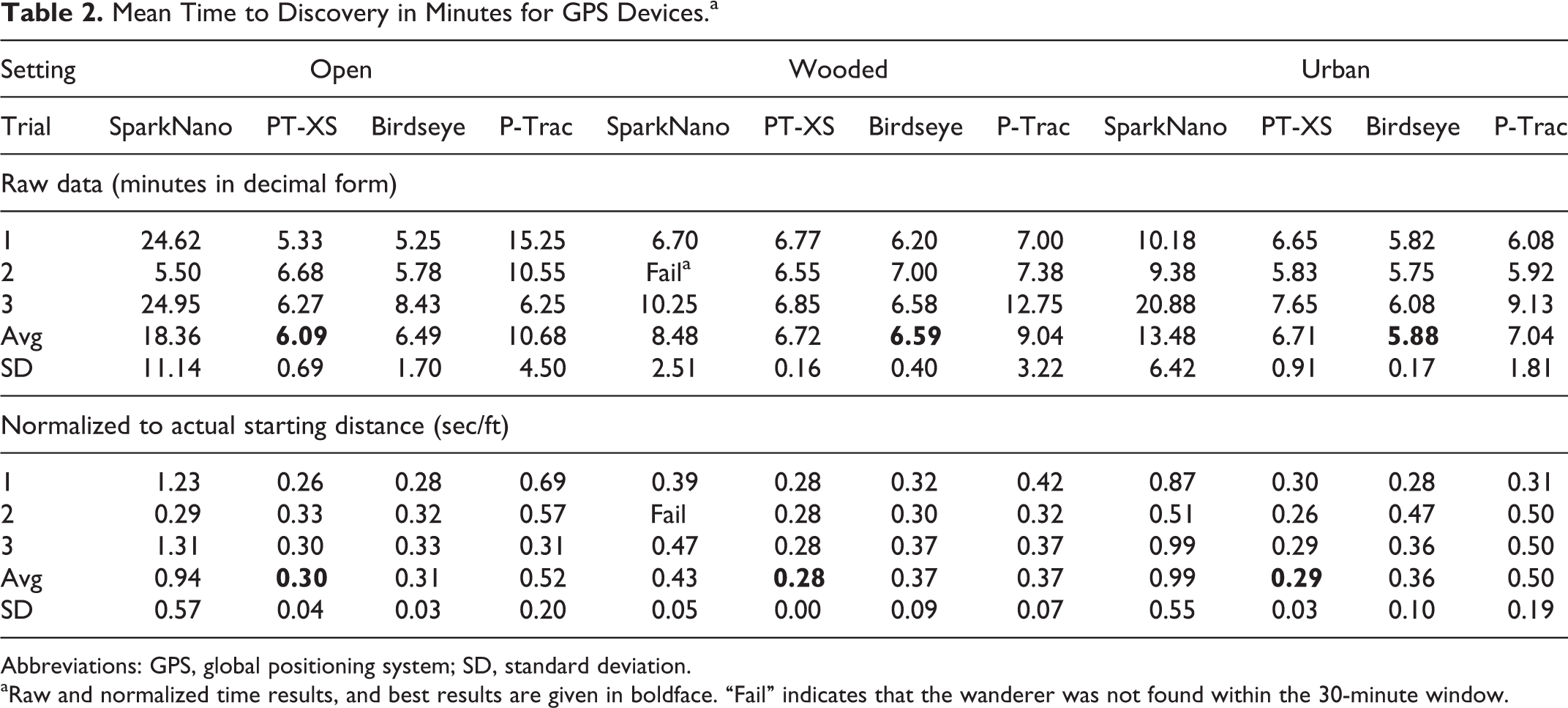
Abbreviations: GPS, global positioning system; SD, standard deviation.
aRaw and normalized time results, and best results are given in boldface. “Fail” indicates that the wanderer was not found within the 30-minute window.
The GPS Data of Tracker’s Path
Figure 1 shows an example of the locator’s path reconstructed from the collected GPS data for an RF trial in the wooded setting at this particular device’s 100% MOFR. The arrow in the center is the locator’s starting position, and the one near the bottom is the missing person’s location. The locator covered a significant amount of ground and required over 23 minutes to locate the missing person in this particular trial. Also, note the curved nature of the path and that the locator perfectly retraced their steps in several instances. This is attributable to the wooded setting, since the locator was bound to follow existing foot trails in the woods.
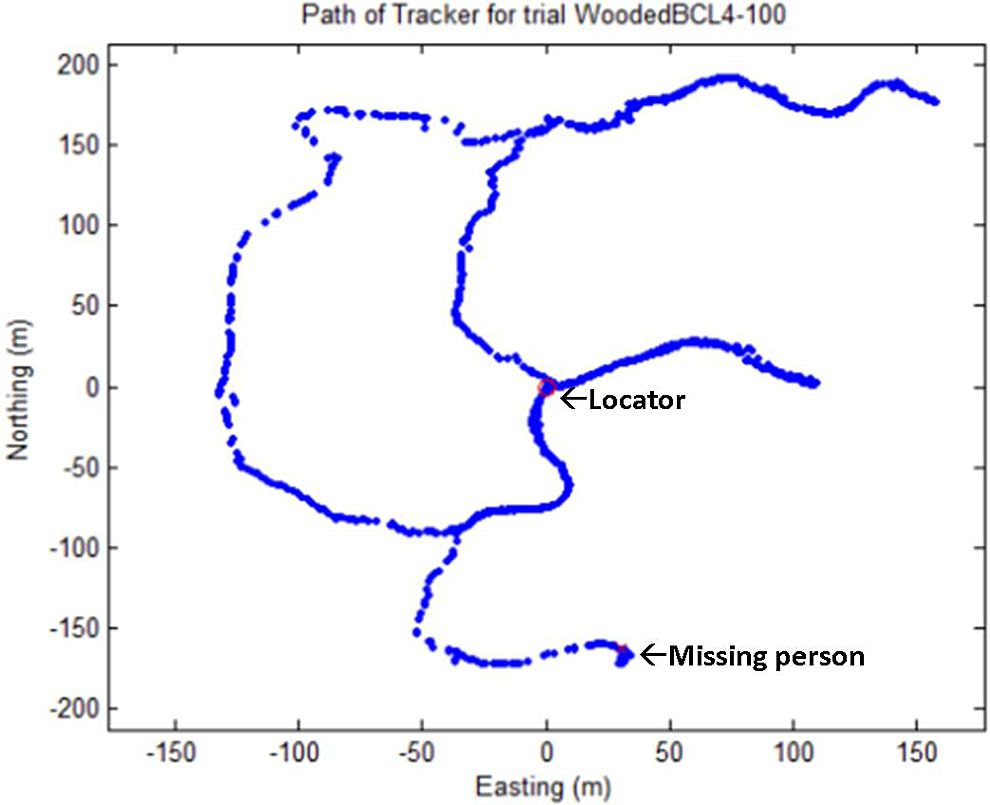
The GPS data of tracker’s path using an RF device to track a “missing person” in the wooded setting at 100% MOFR for this device. Arrows represent locators starting position, and missing person
The GPS data was used to determine the exact initial distance between locator and missing person and to calculate the FD of the locator’s path. Figure 2 shows how FD of the locator’s path varies with starting distance in the open setting using RF devices. Two of the 3 devices showed no significant correlation between FD and starting distance, while the third device showed a negative correlation. This trend suggests that the third device (WanderCare) had better directional feedback at greater distances but was less effective when the locator began his or her search closer to the missing person. The FD was unrelated to the time required to locate the missing person since it was a measure of the directness of the path taken to discover them. In the urban setting, FD was observed to increase across all RF devices at all distances (Figure 3). This is partly due to the fact that the locator had to navigate around buildings (much like they had to stay on walking trails in the wooded setting). This may also be due to the transmitter’s signal being attenuated or reflected by buildings present between the transmitter and receiver. Also, we saw positive correlations between FD and initial distance for 2 of the 3 devices. This suggests greater difficulty obtaining a reliable signal at greater distances in the urban setting. Not surprisingly, repeated trials for the same devices showed greater variability in this, more challenging, urban setting.
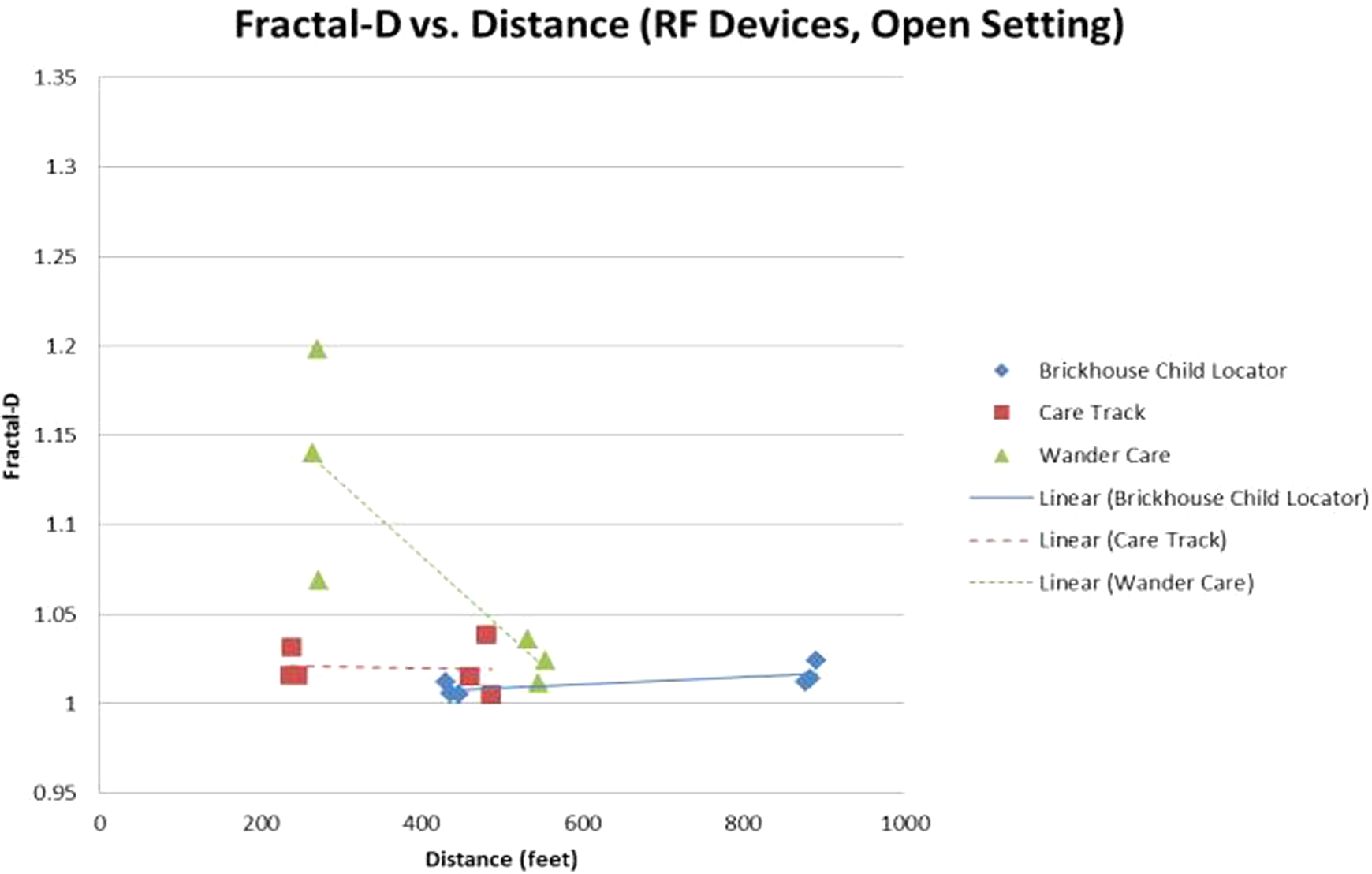
Fractal dimension versus initial starting distance (ft) for RF devices in the open setting. RF indicates radio frequency.
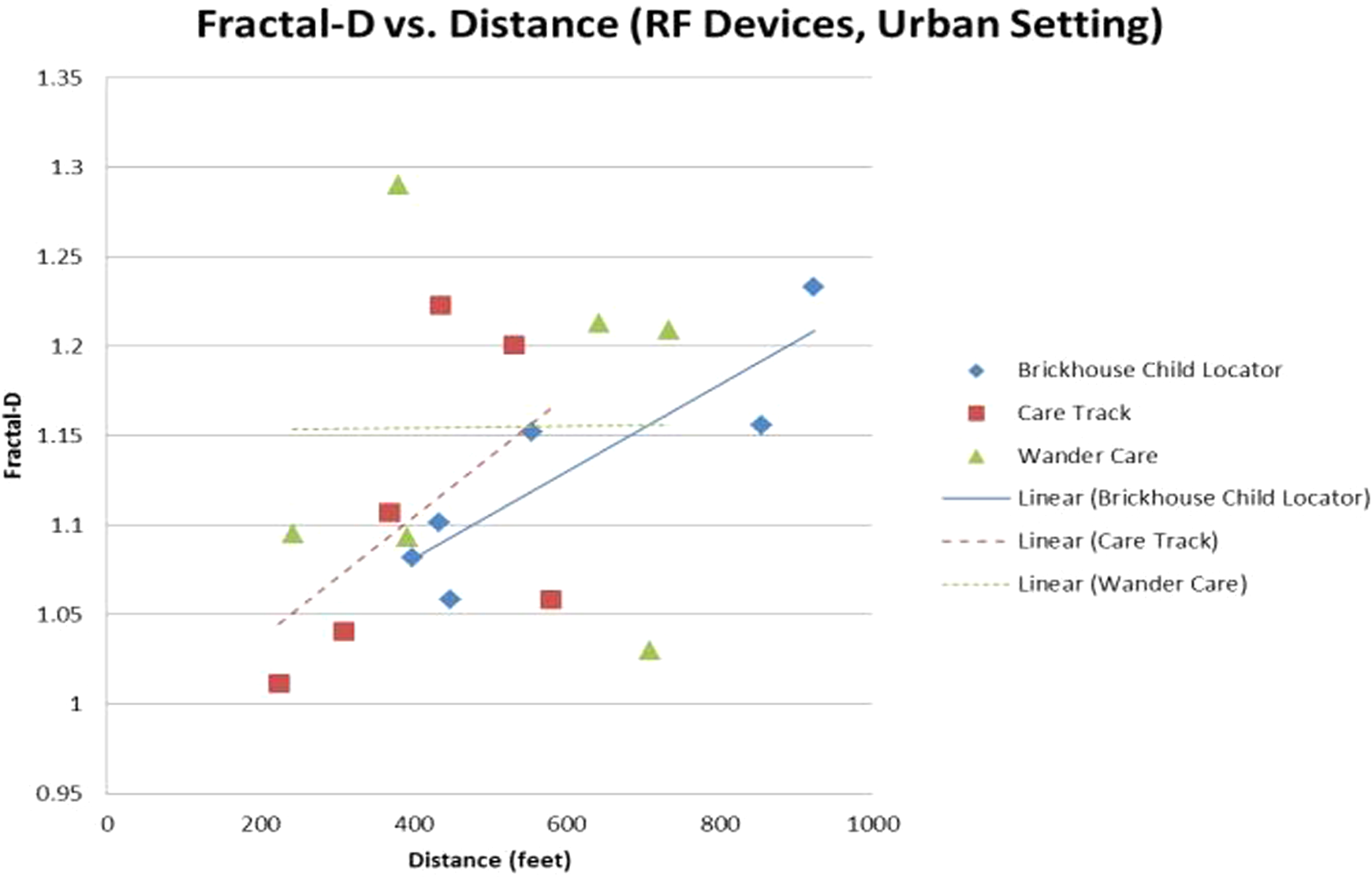
Fractal dimension versus Initial Starting Distance (ft) for RF devices in the urban setting. RF indicates radio frequency.
For the GPS devices we noticed increased variability in FD in wooded and urban settings, as shown in Figure 4. Again, this is partly due to obstacles like trees and trails taken in wooded setting, and buildings in urban setting.
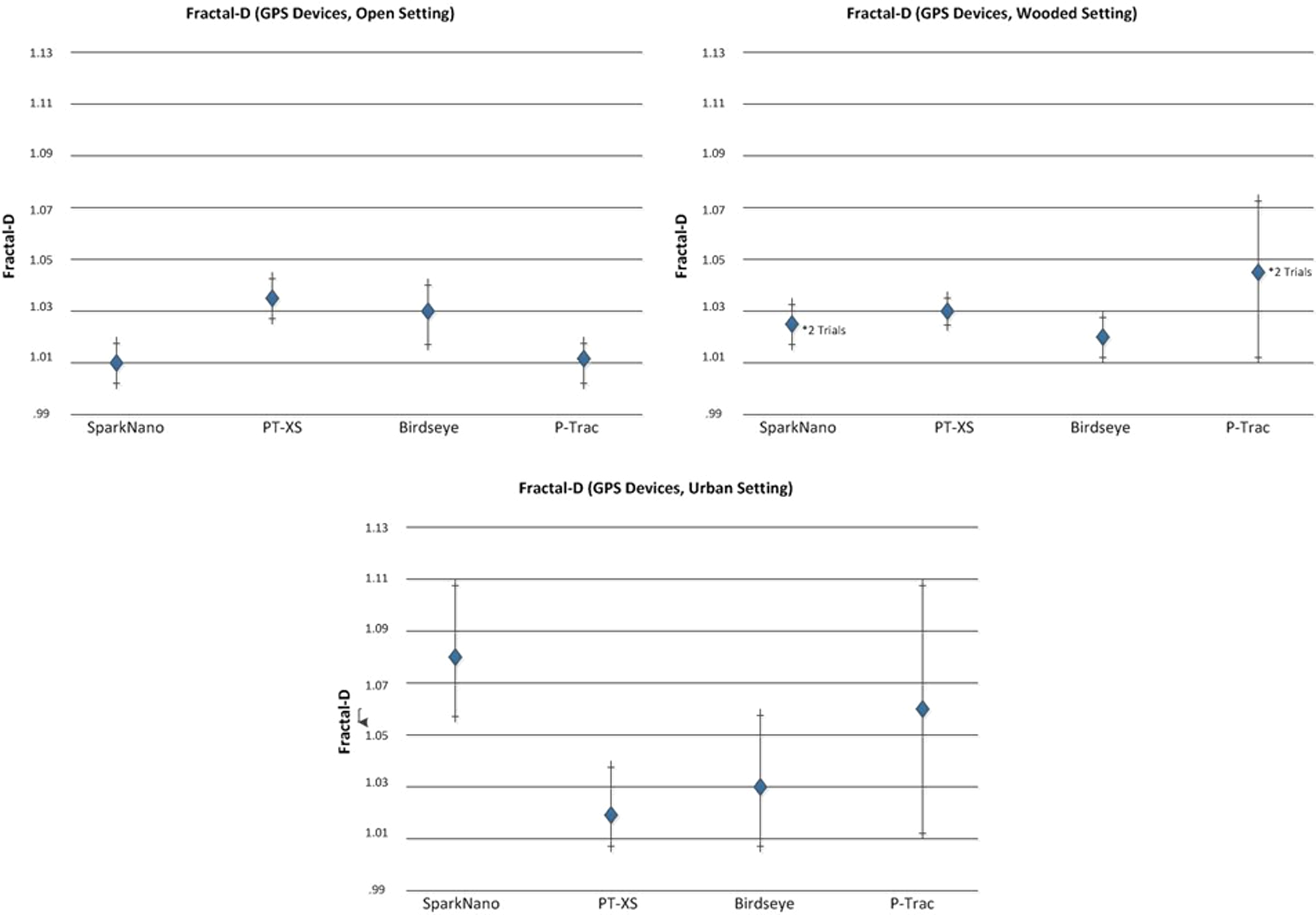
The FD results for GPS devices for open, wooded, and urban setting. FD indicates fractal dimension; GPS, global positioning system.
Discussion
We tried to evaluate the ability of multiple, commercially available, RF and GPS devices to locate a missing person in a set of simulated exercises. A surprising finding was that manufacturers’ claimed ranges may not be attainable in the particular locating scenarios encountered by the users. This may be due to not only the obstructions present but ambient RF noise from other wireless communication equipment that is unperceivable to the user.
The urban and wooded settings were specifically chosen in order to challenge the performance of tracking devices. It is important to note that the RF devices rarely had a discernable signal at the beginning of the trial. These devices generally picked up a signal only after the locator walked around aimlessly and happened to walk within range of the missing person. Until this occurred, the device was not useful in locating the missing person. Furthermore, there were several trials in which the locator found the missing person by aimlessly walking around without the device ever picking up the transmitter’s signal. In these particular trials, the device was of no use in locating the missing person.
The GPS devices, on the other hand, were highly reliable in providing a position as soon as one was requested. There was just 1 GPS trial in which the device could not get a “fix” on the missing person’s location within the 30-minute time limit. Furthermore, the accuracy of the GPS readings was impressive. For example, when the missing person was located under a cluster of large trees, the locator consistently knew which tree specifically to look under. Another important observation of the data logged from the locator’s path is that the urban and wooded environments impose a type of “artificial tortuosity” on the locator’s path. This is because in these settings, the obstacles (buildings, trees, brush, etc.) force the locator to walk along certain pathways, regardless of the feedback indication they are receiving from the tracking/locating unit. This is an unfortunate reality, as it likely inhibits the FD measure from capturing actual differences in performance among the technologies evaluated. On the other hand, the open setting was free of obstructions, and so the FD measured in this setting is purely dependent on the accuracy of device feedback.
Conclusions
The use of tracking/locating technologies in recovering missing persons is intended to minimize the time required to do so, thereby reducing the risks to the missing person and burden on the tracker/locator. Accordingly, time to discovery is the primary measure of efficacy for these devices. With this in mind, we found that the RF devices averaged from 0.33 to 0.72 seconds to close 1 foot on the missing person, while GPS devices averaged just 0.28 to 0.30 seconds. This difference is statistically significant and suggests that each GPS technology evaluated would be more effective in tracking a missing person than any device of the RF technology group in all scenarios tested.
A secondary consideration in evaluating tracking/locating devices is the accuracy of their feedback indication. While this quality is inherently encompassed by the time to discovery, it is specifically quantified by the FD of the locators’ path. As discussed earlier, only the open setting provides pure insight into device efficacy. The average FD of the RF technology group in the open setting was found to be 1.037, while that for the GPS technology group was 1.021, though this was not a statistically significant difference in performance.
In our evaluation, the locator knew that the missing person was within some specified distance; whether it be 50% or 100% MOFR for RF devices, or 0.25 miles for GPS devices. In reality, however, a locator would likely have no certainty of the missing person’s range. For this reason, a GPS device would be vital for tracking/locating because the missing person could potentially be miles away and the RF devices would be of no use.
In order to maximize the efficacy of the GPS devices, it is recommended that the locator also employ an Internet-ready mobile device with a “data plan” and large display with strong backlight. This way the locator can be continuously updated if the missing person moves during tracking, regardless of whether Wi-Fi networks are available, and the locator will be able to see the map in bright sunlight.
One possible advantage of the RF devices is that they work indoors, while the GPS devices do not. In fact, some of the GPS devices evaluated here automatically switched to power-saving mode when indoors, since they won’t receive signals from the satellites. However, no devices were evaluated for indoor efficacy in this study.
In conclusion, hybrid RF-GPS device may be a viable tracking/locating solution, though it is unclear if these are commercially available at present. This technology would rely on GPS functionality to get the locator within 100 ft or so and then the RF capability would be employed to close the remaining distance. This approach capitalizes on the strengths of each device without the limitations of either. Furthermore, this approach would work if the missing person is inside of a faraway building since the GPS devices display the last known position in the absence of a new position. This would presumably be near the entrance to the building, and the RF functionality could be used to pinpoint the missing person within the building.
Footnotes
Author’s Note
The views expressed in this article are those of the authors and do not necessarily represent the views of the Department of Veterans Affairs.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research reported here was supported by the VA National Center for Patient Safety, Ann Arbor, MI.