
Abstract
Fiber-reinforced composites are currently being used in a wide range of lightweight constructions. Function integration, in particular, offers possibilities to develop new, innovative products for a variety of applications. The large amount of experimental testing required to investigate these novel material combinations often hinders their use in industrial applications. This paper presents an approach that allows the layout of adaptive, fiber-reinforced composites by the use of numerical simulation. In order to model the adaptive characteristics of this functional composite with textile-integrated shape memory alloys, a thermo-elastic simulation is considered by using the Finite Element method. For the numerical simulation, the parameters of the raw materials are identified and used to generate the model. The results of this simulation are validated through deflection measurements with a specimen consisting of a glass fiber fabric with structurally integrated shape memory alloys and an elastomeric matrix system. The achieved experimental and numerical results demonstrate the promising potential of adaptive, fiber-reinforced composites with large deformation capabilities.
Introduction
Fiber-reinforced plastics (FRP) are being used in a wide range of applications because of their high tensile strength and stiffness, good crash properties, and lightweight advantages. The attainable reduction of moving masses, e.g. in vehicles and aircrafts, can reduce fuel consumption, leading to economic and ecological advantages. An enormous additional use is ensured by directly integrating functions into such FRP-based lightweight structures, creating so-called smart materials. This additional functionalization covers both integrated sensor [1] and actuator [2] features. One approach for smart materials is shape-variable, adaptive structures with integrated actuators, whose geometrical shapes can be altered significantly. Switchable covers or fasteners, as well as deformable textile membranes (e.g. for architecture), flow-control components, and gripper applications in robotics are the main prospective fields of use for such structures. There is also a large demand for solutions for active surface variation in rotor blades, aimed at preventing stalls. In contrast to previous approaches, the use of shape-variable structures effectively lowers the required installation space and weight, allowing an integration of active deformation into systems currently still requiring a rigid design due to lightweight construction aspects and installation space limits. The lack of external motors or kinematics reduces the number of individual components, increasing life cycle time and minimizing breakdown susceptibility.
Piezo-electric ceramics, piezo-electroactive polymers, electroactive polymers, bimetals, shape memory alloys (SMAs), Shape Memory Polymers (SMP), can all be used as actuators for adaptive composites. These actuators have different advantages and disadvantages in terms of their integration in the FRP by textile processes. Piezo-electric materials are brittle and difficult to use in textile processing. Bimetals are also unsuitable for composite applications because they deform only perpendicularly to the contact plane. Electroactive and magnetostrictive materials are not commercially available in a wire form [1,3]. On the other hand, SMAs contain superior actuating properties, such as very high usable specific energy density (2×103 J/kg) [4], chemical stability, lower degrees of brittleness, and good thermo-mechanical properties [5].
Normally, only small deflections can be realized using thermoplastic or thermoset matrix systems for adaptive composites. To ensure greater deflections, it is necessary to use a matrix system that allows high strain values. Therefore, an elastomeric matrix system has been used in this study.
The layout of textile-reinforced rubber components with integrated adaptive functionalities is a very complex task, because the properties of the matrix, the textile structure, and the SMA have to be considered. Using only experiments for the layout of such components requires a large number of specimens and is not practicable. To avoid this, a numerical model is developed that allows the derivation of the necessary material-special and structure-specific characteristics for the aimed adaptive property profile. Thus, the amount of work for testing can be reduced significantly.
In order to achieve a realistic prediction of the deformation behavior of textile reinforced rubber components with integrated adaptive functionality, the multi-physical characteristics of the single components need to be considered. Thermomechanical approaches for modeling fiber reinforced polymer systems are proposed e.g. in [6] at a fixed length scale and e.g. in [7] with respect to an intrinsically given length scale difference between fiber and structural application. Especially SMAs are characterized by a strong coupling of their electrical, thermal and mechanical properties. Similarly, the sensitivity of the matrix components, such as rubber and glass fibers (GF), with respect to thermal and mechanical loads is intrinsically given, see e.g. [8,9]. In order to achieve an energetic equilibrium and a realistic numerical result, convective surface phenomena, which are naturally existing, if a change of temperature with respect to the environmental temperature occurs, are to be taken into account.
This paper proposes a finite deformation, thermo-elastic numerical simulation of an uncontrolled textile-reinforced rubber specimen with integrated adaptive functionalities, which is excited by an electrical energy input and undergoes heating as well as deflects according to its mechanical boundary conditions. The numerical solutions are obtained using the Finite Element method (FEM) and are compared to experimental data.
Materials and methods
Materials
A textile elastomer composite made from a fabric as reinforcement and a silicone rubber based matrix was produced. Therefore, the first step consisted of manufacturing the glass fabric, into which adaptive yarns were integrated during weaving. The composite specimen was made out of this fabric and an elastomer matrix system in a sandwich design (matrix/fabric/matrix) wherein the SMA wires are positioned out of the neutral axis, due to their position on the upper side of the fabric. The composite then served to examine the actuator behavior on a laboratory scale.
Properties of the used SMA wire [5].

SMA: shape memory alloys.
Properties of the used glass yarn and the fabric.

A pourable two-component silicone rubber is used as the matrix system. It has a Shore A hardness of 43, a tensile strength of 6.7 MPa, and a thermal conductivity of 0.27 W/mK in the cured state. The application temperature range of this elastomer is −40 to +200℃. This kind of elastomer is cured at room temperature, which makes it particularly suitable for the production of composites with integrated SMA yarns, whose activation temperature is not exceeded during curing.
Methods
Sample preparation. The fabric with the integrated SMA is produced in plain weave on a Dornier PTS 4/J rapier weaving machine (Lindauer DORNIER GmbH, Lindau, Germany) with a Stäubli UNIVAL 100 Jacquard machine (Stäubli Bayreuth GmbH, Bayreuth, Germany), Figure 1. The SMA is locally integrated into the weave as a weft yarn. Therefore, no additional steps are necessary. Warp and weft yarn density of the fabric are 8.2 yarns per cm.
The glass fabric with the integrated SMA yarns is then infused with the liquid silicone rubber. To achieve this, a mold is made from glass plates, which allows an even and reproducible application of the silicone rubber to the fabric. The use of glass plates ensures a clean removal of the textile-elastomer composite, as silicone rubber does not adhere to glass. The fabric is fully impregnated with the matrix. The thickness of the applied elastomer layer is 5 mm. To ensure the adaptive functionality of the specimen, the integrated SMA wires need to be placed out of the neutral axis (see Figure 2). While the fabric is positioned in the neutral axis of the sandwich structure matrix/fiber/matrix, the SMA wire lies out of the neutral axis because it is structurally integrated at the upper side of the fabric.
Rapier weaving machine. Test set-up to control and to measure the deflection of the composite specimen.

Test set-up. To investigate the deformation capability, the specimen is linearly clamped (see Figure 2). This way, the sample is freely movable below the clamping. The working principle requires the positioning of the integrated SMA wires out of the neutral axis of the adaptive textile-elastomer composite (see Figures 2 and 3). When thermally activated, the SMA actuators contract and cause a mechanical tension inside the composite. When the contracting SMA wires are placed out of the neutral axis, as is in the presented investigation, their compression leads to a defined bending deformation of the specimen.
Geometry, thermal boundary conditions and discretization of the numerical simulation.
The SMA yarn is activated by applying a voltage, which in turn causes a current flow through the materials, as shown in Figure 2. A power adapter with an adjustable current limit serves as energy source. The current limit restricts the maximum heating output, preventing thermal destruction of the SMA actuators.
To measure the curvature of the deformed composite body, a Sharp GP2Y0A41SK0F triangulation sensor is used. It measures the distance between the sensor and a reference point on the surface of the composite body. The latter in turn is used to determine the curvature of the specimen. The reference point is placed 210 mm away from the clamping site.
Model parameter at a reference temperature of 298.15K and an equal environment temperature.
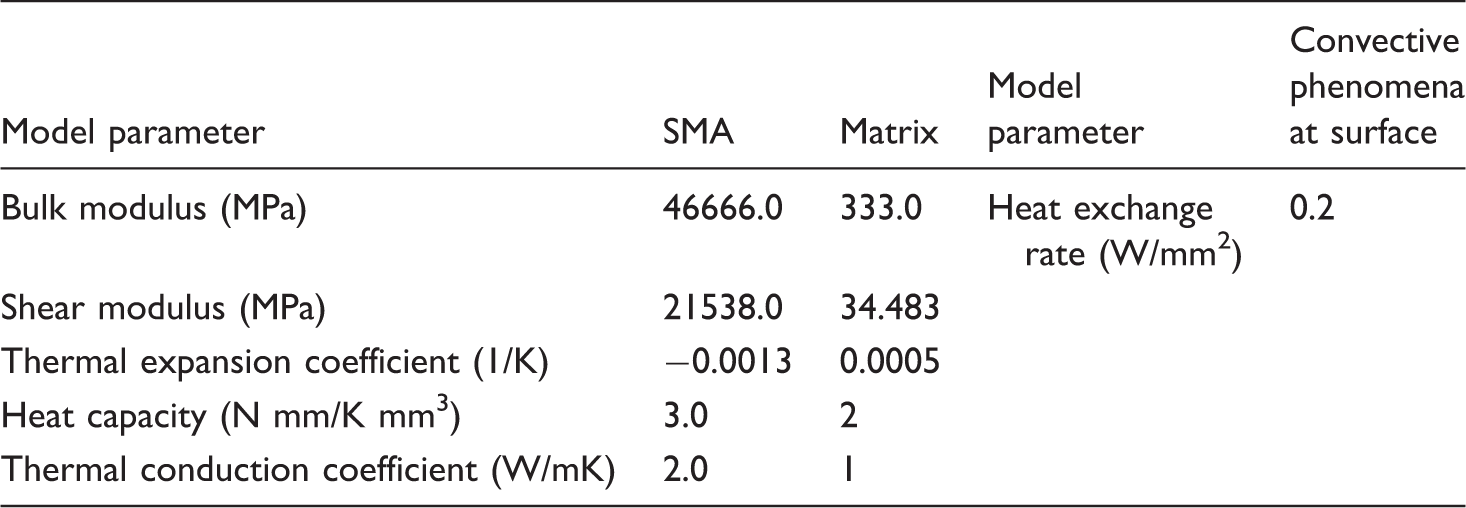
SMA: shape memory alloys.
The thermal power load inside the SMA is applied within 5 s, is kept constant for 845 s and removed again within 5 s. The mechanical boundary conditions are schematically depicted in Figure 4. The deflection of the monitoring point is computed via the cosine function of an angle of 30° of the computed displacement u.
Schematically depicted mechanical boundary conditions and monitoring point position considered within the simulation.
Results and discussion
When the SMA actuators are thermally activated they cause a significant deflection of the adaptive textile-elastomer composite (Figure 5). Figure 6 compares the time course of the measured experimental and the simulated results, and shows the depiction of the loading function for the thermal power experiment.
Deflection behavior of the adaptive textile-elastomer composite. Left: no deflection, Right: maximum deflection (deflection: 90 mm, 35% related to the component length). Comparison of experiments and simulation as well as the depiction of the loading function for the thermal power.

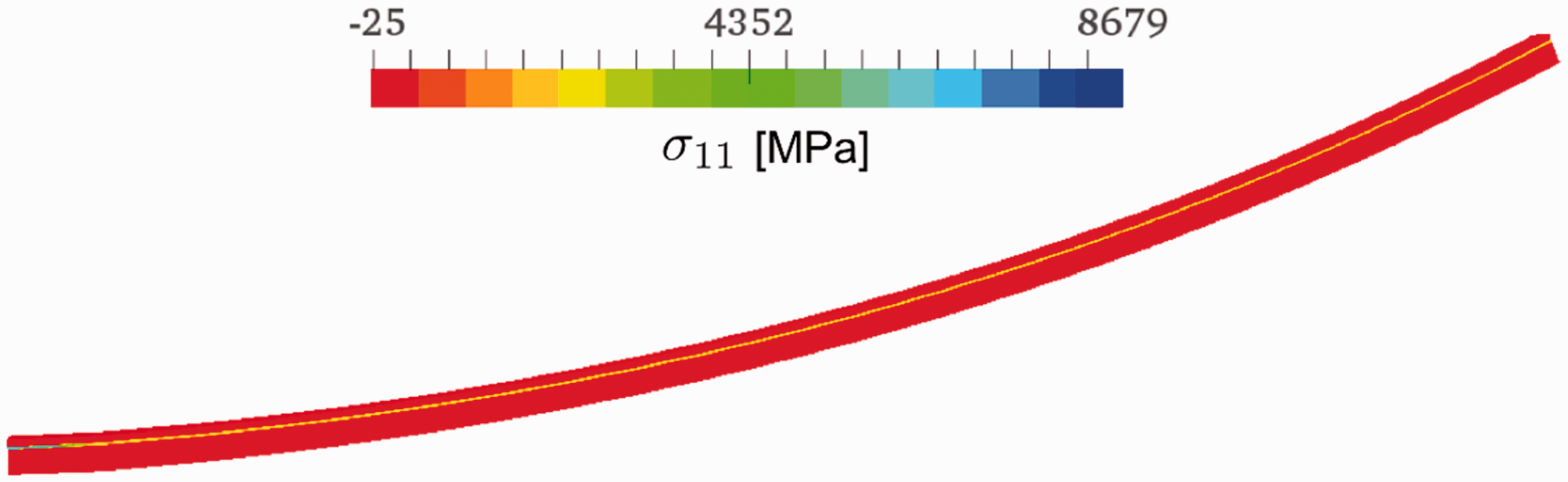
The differences in the deflection of experiment and simulation are due to the uncertain model parameters and the assumption of thermo-elastic material behavior at finite deformations. Nevertheless, the numerical results show the general ability to capture the main phenomena of the underlying electrical-thermo-mechanical experiment by the proposed thermo-elastic simulation. Namely, the increase in deflection at input of thermal power into the SMA. Figures 7 and 8 show the increase of tensile Cauchy stresses inside the SMA, due to a compression upon heating. Keeping the thermal power constant, the initially increasing temperature inside of the specimen is exchanged with the cooler environmental temperature, leading to a constant deflection (see Figures 6 and 9).
Deformed specimen, longitudinal cross-section and related stress distribution at t = 5 s. Deformed specimen, longitudinal cross-section and related stress distribution at t = 850 s. Mid-cross-section and temperature change at t = 5 s (left) and at t = 850 s (right).

Conclusion
The promising potential of adaptive fiber-reinforced composites with large deformation capabilities is demonstrated using an experimental, as well as a numerical approach. These new materials and structures with new functionalities can be used efficiently for high-tech applications, like robotics, or adaptive wings in aviation. The modeling and simulation of this material class enables a powerful tool for exhausting the full adaptive potential for the individual application scenario.
It can be noted that the proposed thermo-elastic simulation is generally able to capture the main characteristics of the underlying model problem. The remaining discrepancies between simulation and experiment (compare Figure 6) are due to the non-considered inelastic, thermomechanical characteristics of the matrix material as well as of the SMA. Especially under large deformations energy is dissipated within the material due to non-elastic effects of the materials, such as visco-elasticity of the silicon-rubber matrix. These effects might decrease the deflection response of the specimen at loading and unloading, respectively. Furthermore, the thermal expansion of the SMA, which is here assumed to be negative under heating, needs to be investigated in-depth, and modeled in an appropriate manner.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.