
Abstract
The main purpose of this study is to explore the feasibility of achieving a fourth integral for a charged rigid body (RGB) rotary movement, considering the influence of gyrostatic torque (GT) and a uniform electromagnetic field. Six nonlinear first-order differential equations (DEs) and their three first integrals, pertaining to geometry, area, and energy, regulate this problem. The analytical solution to the issue necessitates approaching a crucial fourth integral. This paper presents a pivotal criterion for a function
Introduction
The RGB problem has captured the attention of eminent scientists for over two centuries, owing to its significant applications in various aspects of life, particularly in fields related to gyroscopic theory, such as spacecraft, airplanes, submarines, and similar technologies. This problem is back to the pivotal work of Euler in 1758, 1 where he lays the foundational aspects and studies the free motion of the RGB. In 1788, 2 Lagrange explored the symmetric case of this problem, incorporating the influence of a uniform gravity field. Remarkably, the solutions to these cases are expressed as elliptic functions of the time variable. The equations governing this motion are derived from the equations of Euler-Poisson, which, intriguingly, feature three first integrals of motion: the integrals of area, energy, and geometry. However, the resolution of these equations relies on the inclusion of an additional fourth first integral, which is independent of the aforementioned three.3–5 One century from Lagrange’s case, Kowalevski in 1889 6 made her significant contribution to identifying a third integrable case (IC). An extraordinary aspect of Kowalevski’s discovery is that the general solution of the system governing a rotating heavy RGB about a fixed point can be formulated for all initial conditions exclusively in these three cases.
Several IC are found after the aforementioned cases such as Hess, 7 Steklov, 8 Chaplygin 9 , and others. These scenarios have succeeded in the first three IC, which investigate integrability for the problem. However, the illusive fourth first integral has yet to be obtained in its general form. The pursuit of this integral results in the invention of several IC, as shown in Ref. 10–13, especially when the RGB is subjected to gyroscopic and potential stresses in various circumstances. These attempts aim to untangle the intricacies of the situation by identifying IC and contributing to a more complete knowledge of the dynamics involved. Generalizations of the introduced IC by Kovalevskaya, Lagrange, and six other scenarios have been successfully derived. Furthermore, in Ref. 14, additional conditions are formulated to extend the generalization to cover scenarios such as Chaplygin and Yehia. Moreover,15,16 delves into the exploration of determining the urgent fourth integral for the RGB’s motion, considering the influence of a Newtonian field (NF) and GT vector in a straightforward procedure. For a more in-depth understanding of various IC, researchers are encouraged to see Ref. 3–5. The question that comes to mind now is how long the search for integrable states will be carried out. The answer is quite straightforward and can be expressed as “Forever,” especially when we can apply and determine the moments of forces that result in integrable problems with convenient conditions. Achieving the fourth first integral in a general scenario proves to be a formidable challenge, obstructing progress in finding general solutions for the equations of motion (EOMs). Consequently, an alternative approach is needed to unearth these solutions. Perturbation methods emerge as crucial tools in determining approximate solutions for such problems, for example, Ref. 17–25. As detailed in Ref. 17–22, the averaging technique is employed to construct the averaged EOMs for a symmetric RGB. It is noteworthy that this system has been successfully solved for various cases, particularly when the body rotates in a uniform field,16,17 in the presence of GT,19–21 and in the case of charged RGB.21,22 Highly accurate approximate solutions for the RGB problem are achieved in Ref. 23–25 using Poincaré’s small parameter technique. These solutions are obtained in various contexts, including uniform field, GT, NF, and scenarios that are close to Kowalewski’s gyroscope. In Refs. 26,27, for Lagrange case, the averaged system of equations is generated once circumstances are supplied for averaging EOMs in regard to the nutation angle. The movement of the RGB in a medium with linear dissipation is represented by a real physical model of perturbation and a numerical solution is approached. In Ref. 28, with the addition of a perturbation term, the author creates an approximate solution to the system of Euler’s EOMs for symmetric spinning RGBs, as studied in Ref. 27.
Recently, the effects of a GT on the movement of the RGB that is both charged and immersed in a viscous, incompressible liquid have been examined in Ref. 29. The three-dimensional movement of the RGB when it is subjected to unchanging torques that are fixed to the RGB itself and a GT is presented in Ref. 30–35. The authors focused their work on phase space paths to show the evolving states of a system in three different cases. The first two cases deal with applied constant torques along the RGB’s major and minor axes, while the third one investigates the effects of applying a constant torque along the middle axis of the RGB. In Ref. 36, it is demonstrated that the triaxial ellipsoid of inertia equations for gyrostat orientation movement is reversible with two fixed sets. A third fixed set is found for a spherical ellipsoid of inertia. In the scenario of a circular equatorial orbit, it is found that two of these three sets match the corresponding sets of the generating issue. The generating problem’s families of symmetric oscillations are shown to split and produce single oscillations. In Ref. 37, an axisymmetric gyrostat satellite’s rotational motion in a circular orbit while subjected to its gravitational torque is examined. Investigations are conducted on periodic motion of the satellite’s symmetrical axis with respect to the orbital coordinate system. These motions show up as a gradual procession around the orbital plane’s normal in absolute space. In Ref. 38, using control torques derived from Lorentzian forces, the stability of regular precessions of a satellite in a circular orbit is examined. A unique family of linear time-varying systems that can be reduced to time-invariant ones includes the linearized system of EOMs. Both the original time-varying systems and the reduced time-invariant systems were used to study controllability.
Based on the above survey of the fourth integral required to solve the RGB’s problem in its generality and the aforementioned regarding the use of perturbation methods to obtain the alternative approximate solutions of this problem, we present in this study a very simplified method for obtaining this integral. Henceforth, we have considered the charged RGB’s motion, taking into account, the influence of GT. In the present context for the existence of a fourth first integral, we aim to establish a crucial condition that is essential to function F, which is dependent on all body parameters. This will be accomplished through a straightforward procedure. The validity of this procedure is substantiated by its successful application to renowned cases, affirming its effectiveness and underscoring the significance of this criterion in the study. Analysis of rotational dynamics can be used in aircraft, satellites, and spacecraft for attitude control and stability. Moreover, the results may be utilized in understanding rotational motion for tires, braking systems, and suspension design. Furthermore, it utilized in helicopters, drones, and airplanes for generating lift and thrust.
A detailed exposition of the problem
For an RGB with mass
Consequently, the controlling system of motion takes the form3–5

[See Figure 1] Description of the problem.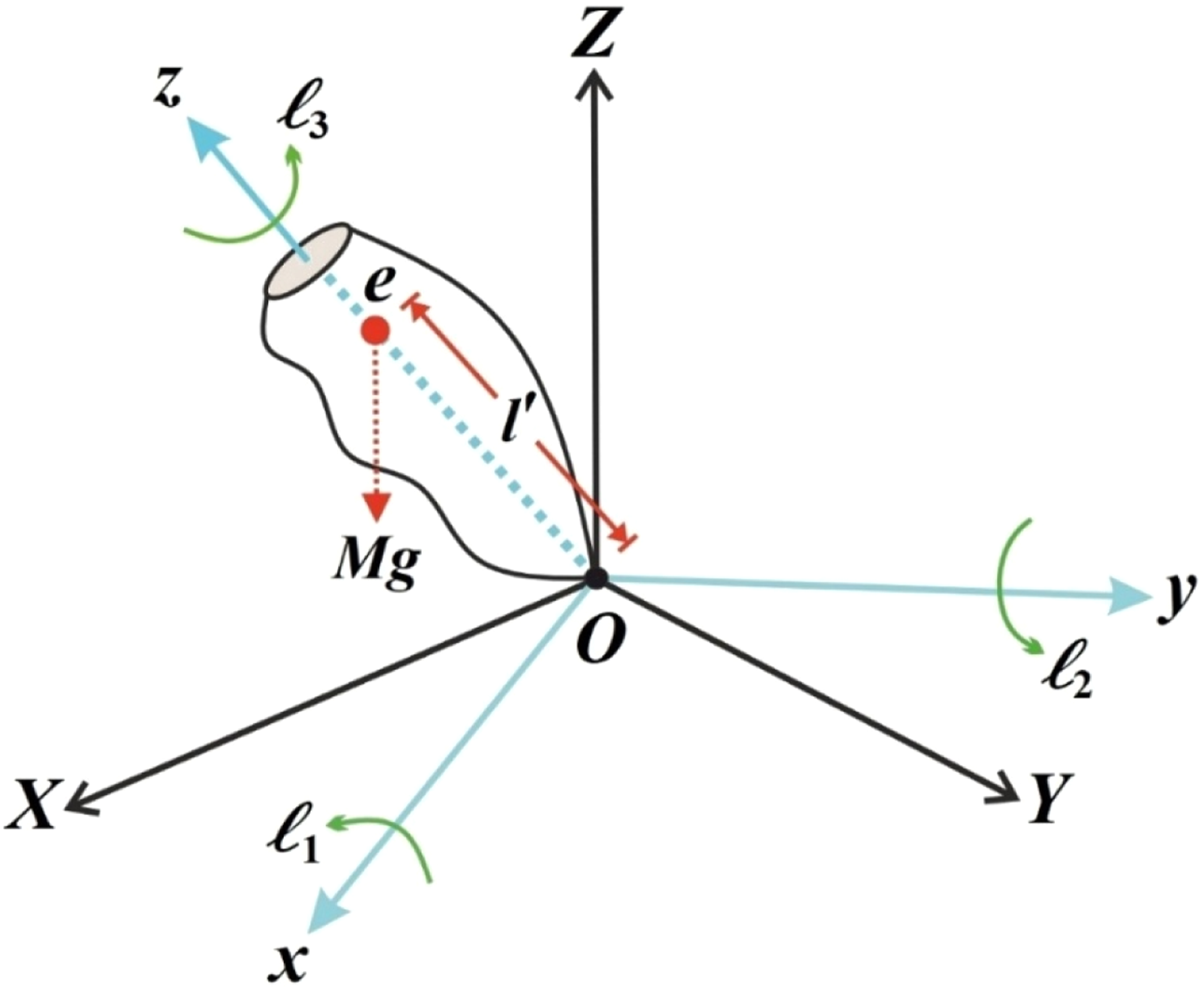
Here,
Upon further examination of the system (1), it becomes evident that it is a self-governing system comprised of six nonlinear 1st-order DEs. Notably, this system possesses three well-known first integrals: energy, area, and geometric integrals, all of which can be expressed as

In order to approach the precise solution for equations in the system (1), a fourth first integral must be estimated. Despite significant efforts by scientists over the past two centuries, this integral has only been obtained for three specific famous cases: when the RGB moves according to Lagrange and Kovalevskaya cases. However, even in these cases, few restrictions must be considered on the mass center position, and the main inertia torques. 25
Identification of the first integrals formulae
To fulfill this section’s objective, we aim to create a function

The third first integral in (2) can be rewritten as

It is evident that this assumption of an arbitrary non-negative constant
The above equation allows us to take the initial circumstances
The parameters
The obtained theorem
The construction of a theorem for the function
Theorem (1)
The necessary and sufficient condition for the function





Proof
Since






Assuming that the function

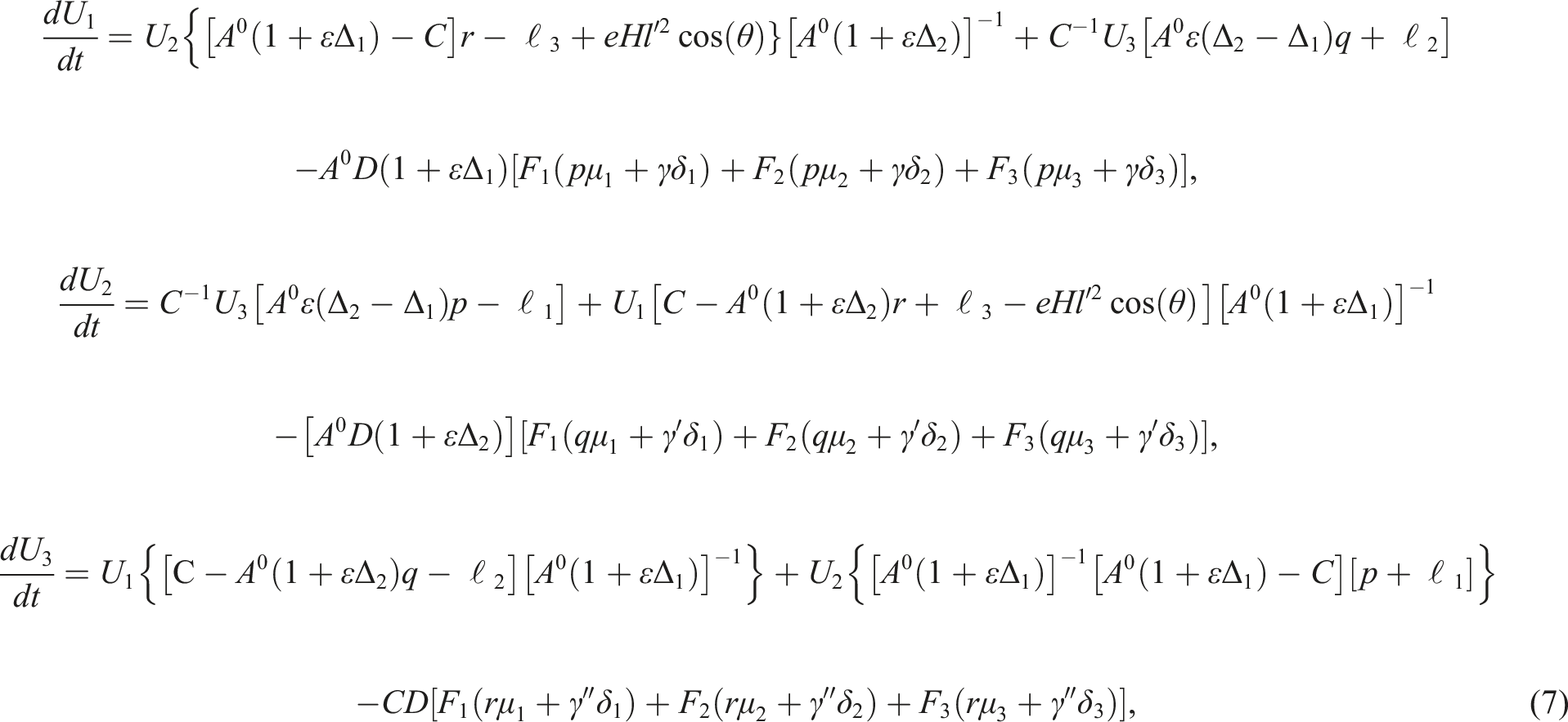
Given that the aforementioned formula may be viewed as a unique identity with regard to every RGB parameter, it can be differentiated with respect to each of these parameters. The partial derivative of (9) with respect to

Given the relationship that exists between the 2nd-order partial derivatives of






It is worthwhile to notice that the left side of (11) is equal to
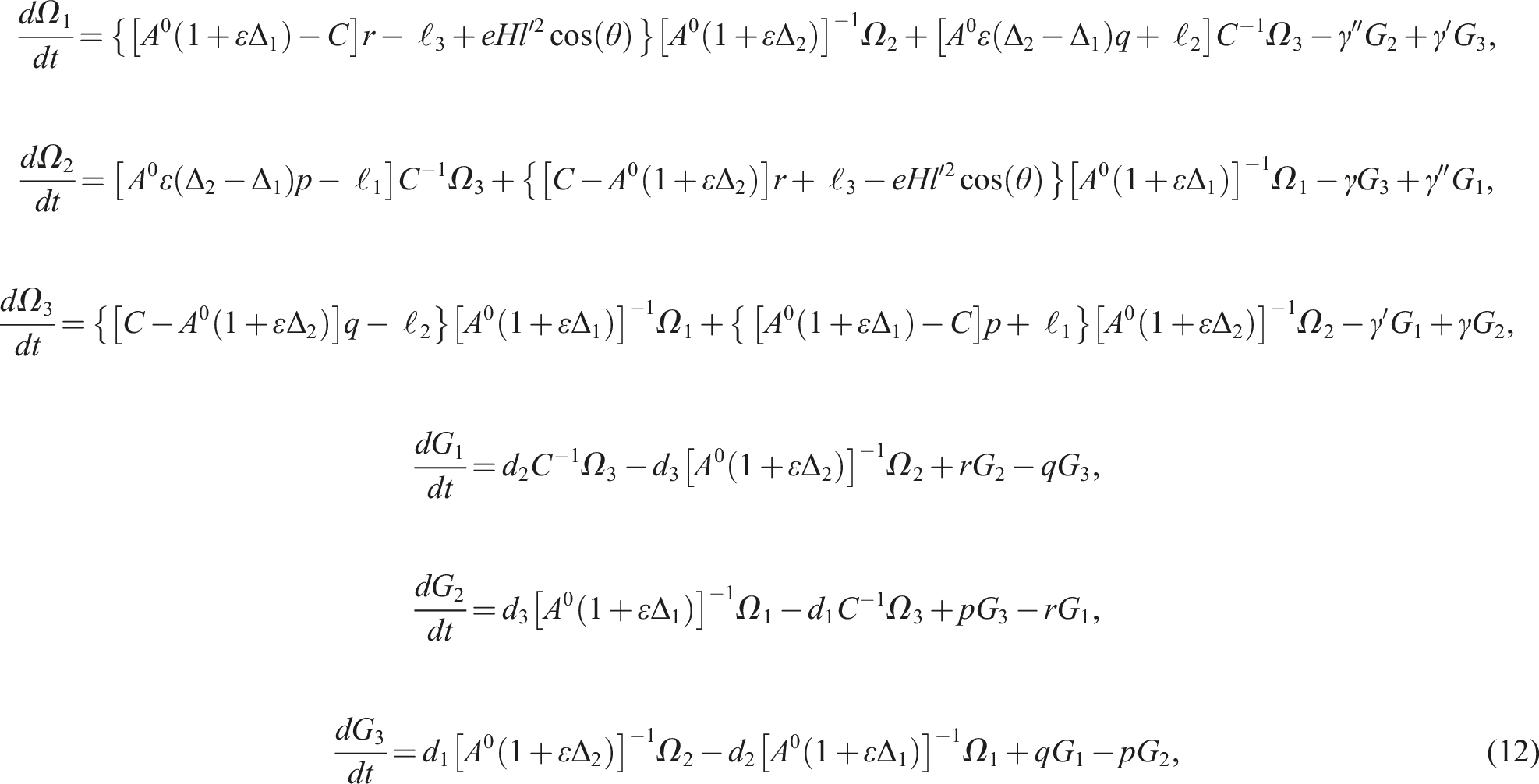
Six partial nonlinear DEs make up the prior system. Thus, the vectors comprising the necessary partial derivatives of the integrals from (1) are fundamental to the solutions of (12). Now, consider the usage of the following substitution in (12)

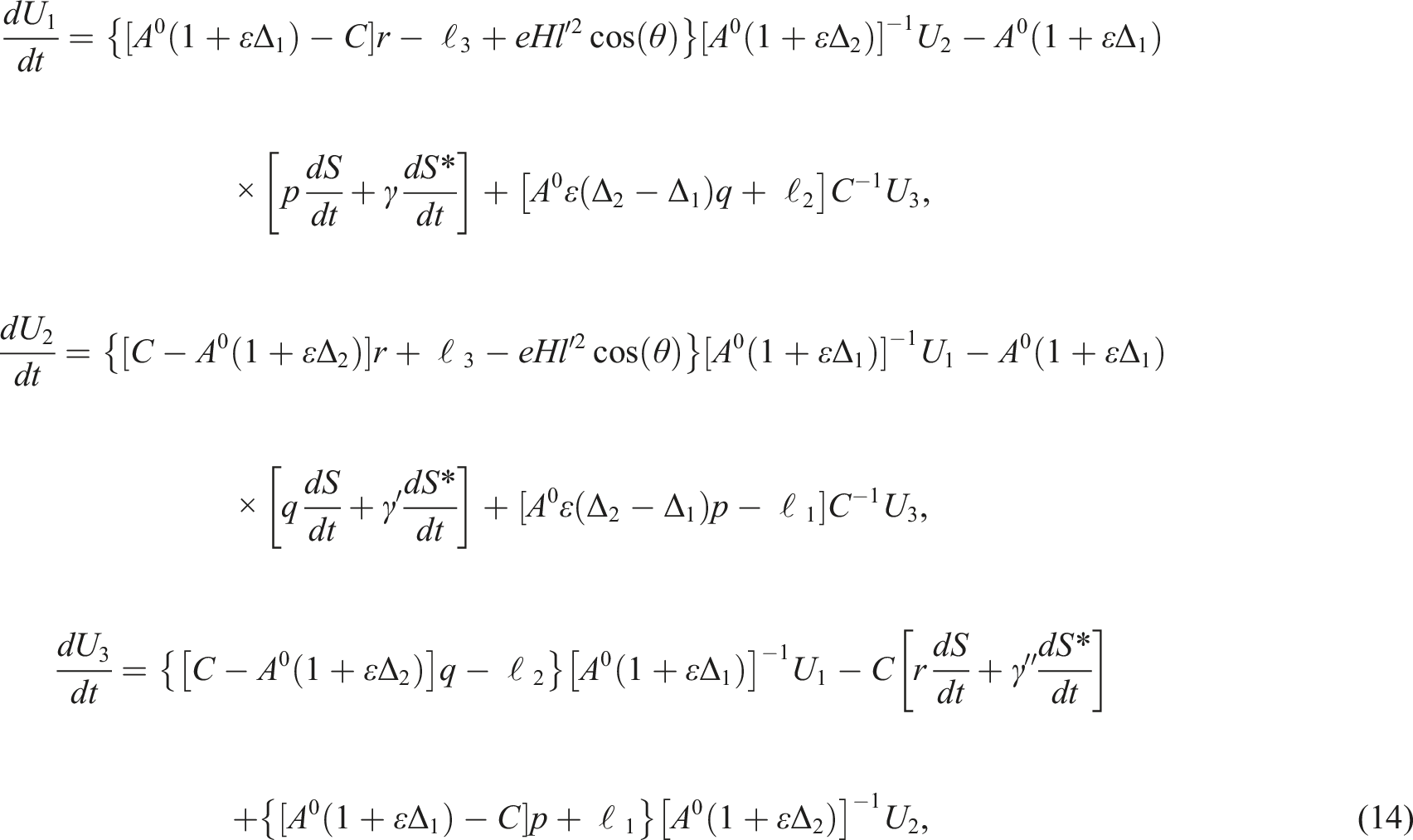

It is easy to demonstrate that equations (5) and (8) are fulfilled when (13) is taken into account. Furthermore, (5) can be obtained immediately by solving (13) for

Carefully examining (9) leads us to the conclusion that the left side of (16) is zero. Additionally, we can determine that
One critical element of this theorem is establishing the necessity of the condition. For this, it is sufficient to prove that

From a mathematical perspective, the expressions

Therefore, the function
Applications for well-known cases
This section’s main purpose is to highlight the importance of the condition by presenting applications of the previous hypothesis to the two most renowned scenarios: Lagrange’s case and the kinetic symmetrical case.
Lagrange’s case
Here, the RGB’s mass center is located on one of its inertia primary axes, such as Lagrange’s case.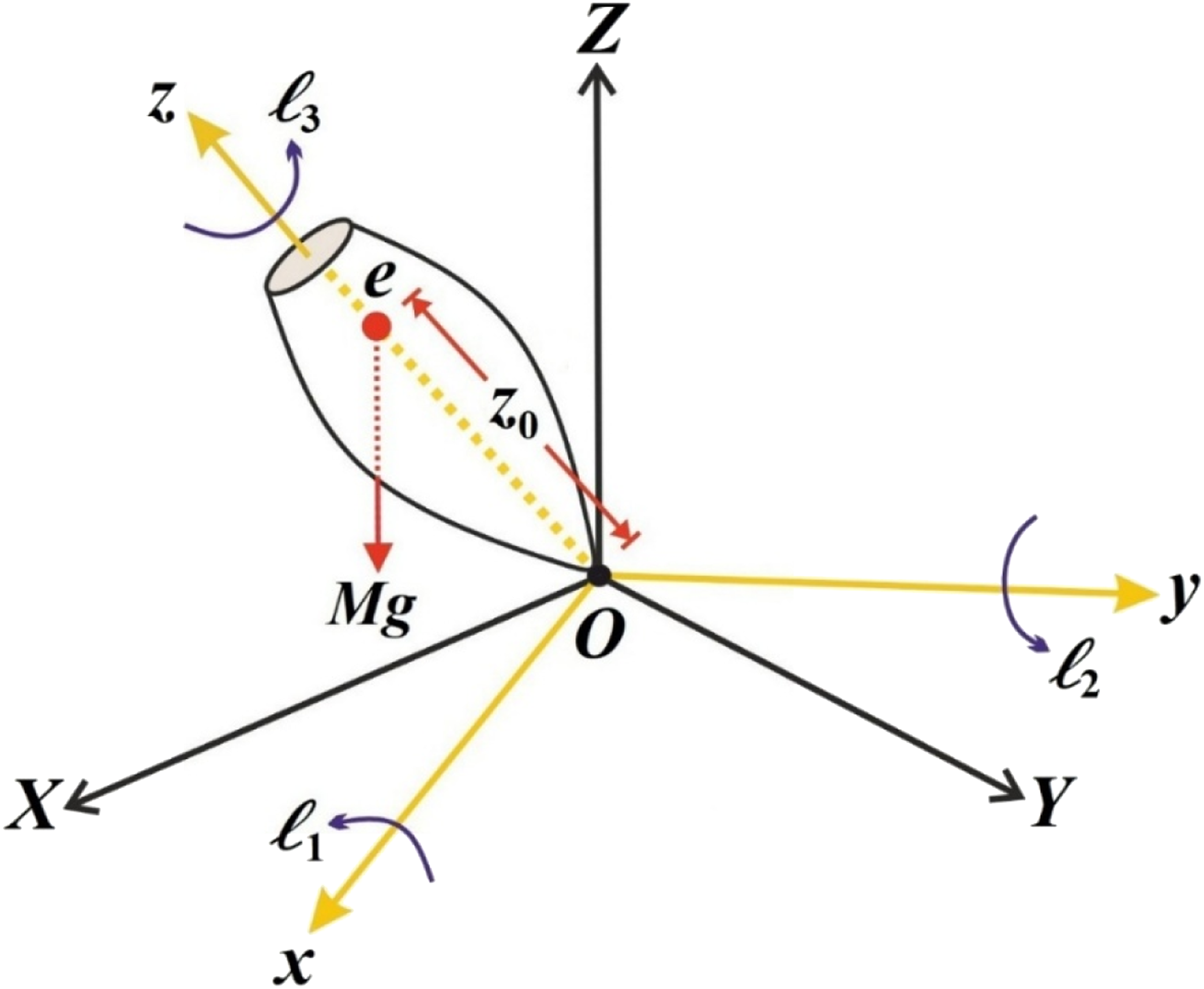
The functions listed below, in turn, fulfill (14)


Therefore, the fourth integral is

Consequently, this specific outcome is consistent with the established outcomes in Refs. 12,13, and 25 which confirm the significance of the previously indicated condition.
The case of kinetic symmetry
This specific scenario, in which every inertia torque is the same, is referred to as a spherical case for RGB’s motion. Thus, the aforementioned functions satisfy (14) in a manner similar to the earlier scenario

By altering (22) with (13), yields

As a result, the fourth first integral in this situation is

This integral matches the obtained one in Refs. 11 and 12 indicating efficiency of the condition given in the hypothesis.
Kovalevskaya’s case
In this scenario, when two inertia torques are added together, it equals double the third torque’s value, and the RGB’s mass center is situated in the plane that contains these equal torques [refer to Figure 3]. Hence, (14) is satisfied by the functions and gives Kovalevskaya’s case.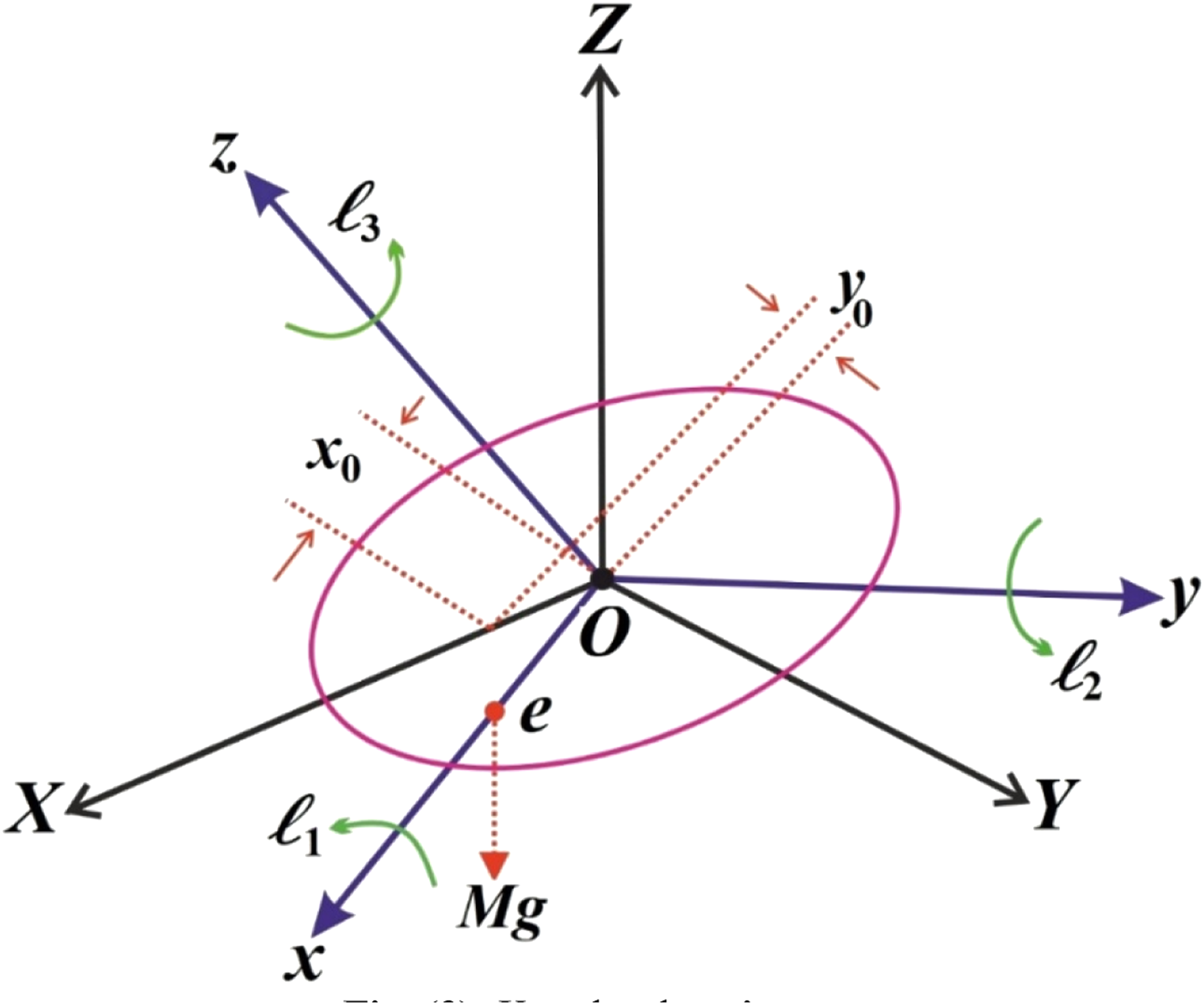
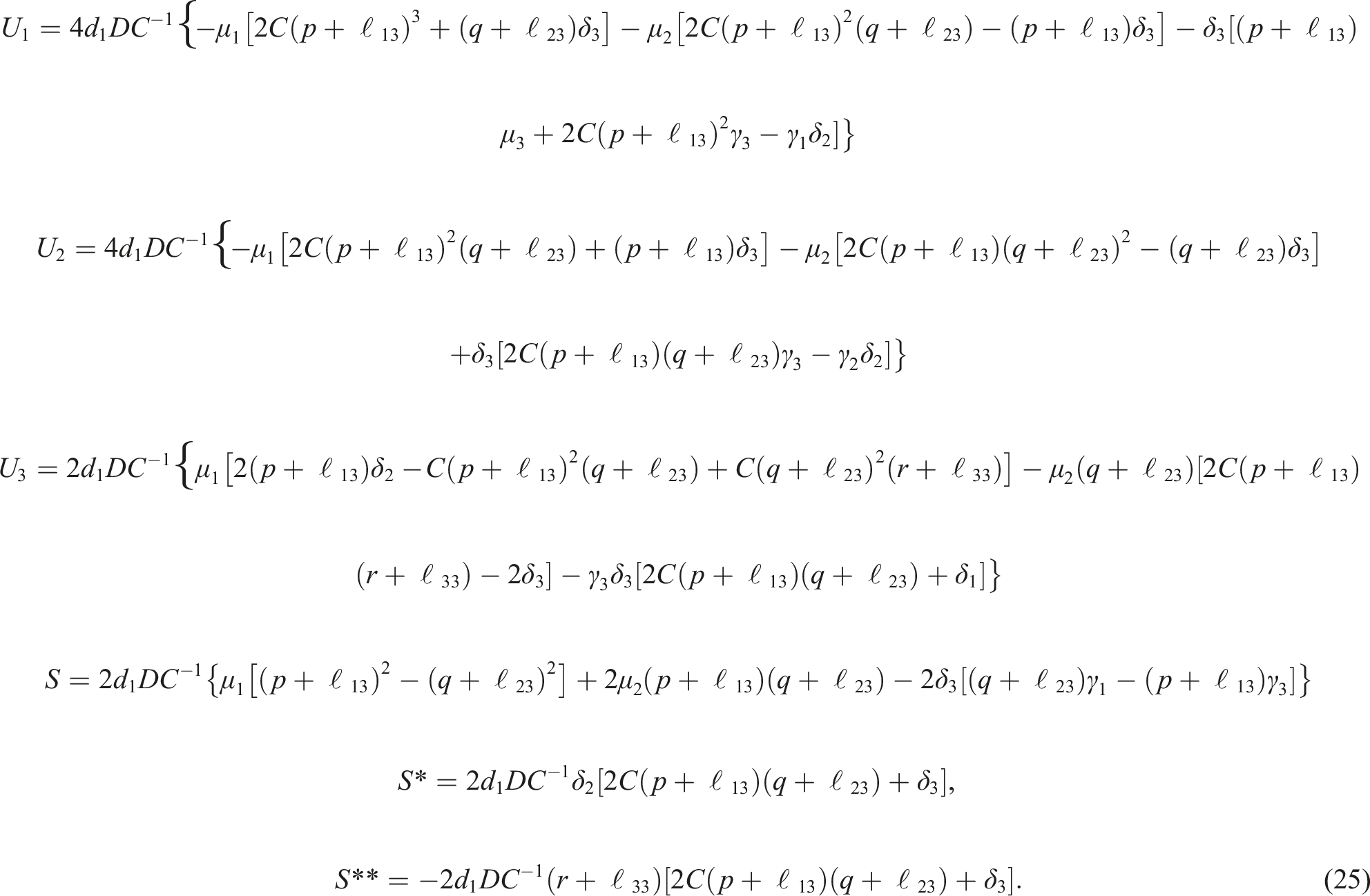

By utilizing (13) and (25), we can directly derive the expressions for the derivatives of the fourth integral as





This result is in good agreement with the obtained in Ref. 12 and 15 when
Concluding remarks
In this study, the EOMs that control the rotation of the RGB around a stationary point are examined taking into account the impact of the GT. The expression for the hypothesis that is essential to identifying a function
Footnotes
Authors contribution
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors extend their appreciation to the Deanship of Scientific Research at Northern Border University, Arar, KSA for funding this research work through the project number “NBU-FFR-2025-912-01”.
Data Availability Statement
This study did not involve any dataset creation or analysis; therefore, data sharing is not applicable.