
Abstract
This study focuses on determining the required minimum-time (MT) for the spatial motion of a free rigid body (RB) experiencing gyrostatic moments (GMs) and viscous friction. The study assumes that the body’s center of mass coincides with the original point of two Cartesian systems of coordinates. An optimal control law for slow motion is established, and the corresponding time and phase pathways are analyzed. The innovative results are presented for two new cases through various graphs highlighting the positive effects of the GMs. A comparison is achieved between the obtained results and previous outcomes that did not consider gyrostatic moments, showing remarkable consistency with slight deviations that are discussed. The practical applications of this study, which limits itself to using gyroscopic theory to maintain the stability and balance of vehicles in which gyroscopes are used, as well as figuring out the trajectory of aircraft and marine vehicles, are what make it noteworthy.
Introduction
The problem of RB has been a source of fascination for researchers for over two centuries due to its diverse practical applications, such as the utilization of gyroscopes in controlling the movements of aircraft, submarines, and spaceships to maintain their stability and determine their paths. The approach to studying this issue varies depending on the initial conditions imposed, particularly concerning the center of mass coordinates and the principal moments of inertia, as well as the initial angular velocity. Additionally, the impact of external factors, such as the gravitational pull of various centers (both symmetrical and asymmetrical) and external moments, leads to different methodologies being employed to address this problem in each unique case.
Therefore, researchers have been intrigued by the quest for a comprehensive solution to this issue, which has historically only been achievable through the imposition of specific constraints. These constrained scenarios are commonly referred to as integrable cases. Due to the complexity or impossibility of attaining a universal solution, approximate solutions have also been explored in previous studies. Additionally, an investigation into determining the optimal control law for this problem has been undertaken.
In Ref. [1], Leimanis provided an introduction to the fundamentals of RB motion, including its governing system, first integrals, and various special cases. The next section delved into the classical path, which explored the integrability of the system for individual RBs and its topological implications. The author then examined the dynamics of symmetric self-excited RBs and coupled RBs. In Ref. [2], Yehia directed his research towards investigating the integrability of RB motion, the motion of heavy gyrostats, and Brun’s problem. Specific solutions for the gyrostat problem were also explored. The study elaborated on how an object could move within a theoretical incompressible fluid that extended infinitely in all directions. Additional insightful analyses regarding RB dynamics were extensively discussed in Ref. [2] and its cited sources. In Ref. [3], the discussion focused on the rapid spinning movement of a rotating RB around a fixed origin point of two Cartesian frames in a uniform gravitational field. The solutions for the equations of motion (EOM) were approximated using the Poincaré small parameter (PSP) approach. The geometric interpretations of these solutions were provided in relation to the considered parameter. These solutions were further analyzed in Ref. [4] when the problem’s natural frequency is equal to
In general, optimal control based on nonlinear DEs is widely recognized as a highly effective tool for the design of feedback control systems. This procedure allows for quick response to disturbances and the maintenance of stability across a range of applications, from aerospace and transportation systems to industrial processes and more. It is worth noting that, until recently, the control of rotational motion of quasi-RBs under specific effective moments had not been thoroughly explored in relation to impact forces at any given moment, aside from the studies referenced in Refs. [15–17]. In Ref. [18], an investigation was conducted on the MT of three-dimensional asymmetrical free RB undergoing decreasing rotational motions, considering both gyrostatic and viscous resistive rotatory moments. An optimal control law was developed to manage the slow rotation of the body, with calculations of the required time and phase paths. Similarly, Ref. [19] delved into the required MT for a dynamic system with asymmetrical characteristics to decelerate its rotation, akin to Euler’s conditions, yielding outcomes consistent with those in Refs. [20,21] when the GM is omitted. In Ref. [22], a vector depicting the angular momentum is created in a 3D space for various system parameter values. The findings suggest that specific ratios of the parameters are required to achieve optimal deceleration of the RB. Furthermore, Ref. [23] examined the MT for a RB with a viscous flexible material attached as a concentrated mass at a specific point on the symmetry axis, aiming to control the deceleration of the body’s rotation and compute the necessary time and phase paths. The numerical results of quasi-optimal braking for symmetric RBs’ rotational movements were explored in Refs. [24,25], accounting for the motion of a point mass fixed at a certain position along the body’s symmetry axis and the impact of medium resistance on braking torque.
Ji-Huan pioneered the homotopy perturbation technique (HPT) and was highly regarded in the field of analytical methods, overshadowing traditional methods. In Ref. [26], primarily highlights He’s concepts and the previous work of the current authors on HPM. In Ref. [27], it is found that the classical HPT is inadequate for analyzing Klein-Gordon equation, leading to a recommendation for a modified approach incorporating an exponential decay parameter. This modified method reveals that the amplitude exhibits exponential decay based on the damping parameter, and it also establishes a frequency equation and determines the stability condition. The work in Ref. [28] utilizes the amplitude-frequency formulation for nonlinear oscillators in order to uncover the crucial mechanism behind pseudo-periodic motion. It is showed that the quadratic nonlinear force plays a key role in causing the pull-down phenomenon during each cycle of the periodic motion. Once the force exceeds a certain threshold value, the system experiences pull-down instability. The study in Ref. [29] revisits the widely recognized Toda oscillator, commonly believed to exhibit periodic motion. The investigation focuses on its pseudo-periodic nature and reveals the discovery of pull-down instability, a previously undocumented phenomenon. In Ref. [30], the vibration of a circular sector in a porous medium is examined, and a fractal-fractional oscillator is created using the two-scale fractal derivative. He’s frequency and Ma’s modification are applied to clarify the periodic behavior of the circular sector in a porous medium.
Moatimid and Amer,31–34 have made significant contributions to the field of nonlinear dynamics and stability analysis through their series of research papers. Each study focuses on the analytical and numerical investigation of complex oscillatory systems and their stability properties under various conditions. In Ref. [31], they explored the dynamic behavior of a pendulum attached to a rolling wheel. An analytical solution for the system’s motion is derived using the HPT. A comprehensive stability analysis is provided. In Ref. [32], the authors addressed the challenge of controlling nonlinear oscillations in a Van-der Pol-Duffing oscillator using a time-delayed feedback controller. The HPT and its modification are used to obtain the analytic approximate solution. In Ref. [33], the authors presented a detailed analysis of a magnetic spherical pendulum, a system characterized by complex interactions between magnetic forces and pendulum motion using the same approach of homotopy. The dynamics of a magnetic inverted pendulum subject to vibrations is investigated in Ref. [34]. Combining analytical and numerical methods, the authors examined the stability and response of the system, providing valuable insights for designing and controlling magnetic-based oscillatory systems.
It is important to point out that the rotation of a quasi-rigid body without a specific effective moment has not been officially regulated from the viewpoint of impacted forces. In a study by Ref. [35], control stages were utilized without considering resulting errors, along with the use of perturbation techniques. Conversely, Ref. [36] examined the slowing of time-optimal symmetric free RB motion. The body is believed to contain a globular chamber filled with viscous liquid, which moves slowly due to frictional resistance from viscous elements. Furthermore, Ref. [37] has enhanced the achievement of slowing down a restricted body to the best possible extent by utilizing torque and viscous friction.
The GM, also known as the gyroscopic or gyroscopic effect, significantly influences the main characteristics of a RB, particularly when compared to another that moves without such a moment. 38 Here is an explanation of these influences. The RB with GM exhibits gyroscopic stability, meaning that it resists changes to its axis of rotation. This results in precession, where the axis of rotation moves around another axis due to an applied torque, maintaining stability. For instance, a spinning top remains upright due to this gyroscopic effect. However, the RB without GM does not experience this stabilizing effect. As a result, it is more susceptible to tumbling or changing its orientation when subjected to external forces or torques. 6
Moreover, the presence of the GM means that the angular momentum vector of the body is significant and affects its motion. The body will tend to maintain its orientation unless acted upon by an external torque. This is utilized in applications such as gyroscopes and reaction wheels in spacecraft for orientation control. 7 On the other hand, the absence of a significant gyroscopic effect means that the body’s angular momentum does not significantly influence its motion. Changes in orientation are more direct and less resisted, leading to potentially less predictable motion under varying external forces.
The rotational dynamics of the body are more complex in the presence of the GM which is due to the conservation of angular momentum. The EOM include terms that account for the gyroscopic effect, leading to phenomena such as nutation and precession. These effects need to be carefully managed in engineering applications to ensure desired performance. Whereas the rotational dynamics are simpler in the absence of this moment as the EOM do not need to account for gyroscopic effects. The body’s rotation can be described more straightforwardly by Newton’s laws without additional terms for gyroscopic influences. 39
Control systems need to account for the GM to effectively manage the orientation and stability of the body. This can be advantageous in providing stable control in aerospace and marine applications where maintaining a specific orientation is crucial. 40 On the other hand, control is simpler since the gyrostatic effects are absent. However, the body may be less stable and require more frequent adjustments to maintain a desired orientation or trajectory.
The aim of this study is to investigate the required MT for a free rotating RB to move in the presence of GM and viscous friction. It is proposed that the origin of the two coordinate frames coincides with the body’s center of mass. The study identifies the most efficient control law for the slow movement of the body, evaluates the corresponding phase and time trajectories, and presents innovative results in various graphical formats to demonstrate the advantages of GM. The results show consistent patterns when compared to previous studies without GM, with no minor differences being explained. The presence of the GM in the RB introduces significant stability and resistance to changes in orientation, which can be beneficial for applications requiring precise control and stability. In contrast, a rigid body without a gyrostatic moment is more susceptible to external forces and torques, leading to less stable and potentially more unpredictable motion. Therefore, the outcomes of this research build upon prior knowledge and apply gyroscopic theory to practical problems such as vehicle balance and stability.
Problem’s formulation
This section of the study provides an overview of the handled problem. The motion of a RB around point Sketches the RB’s model.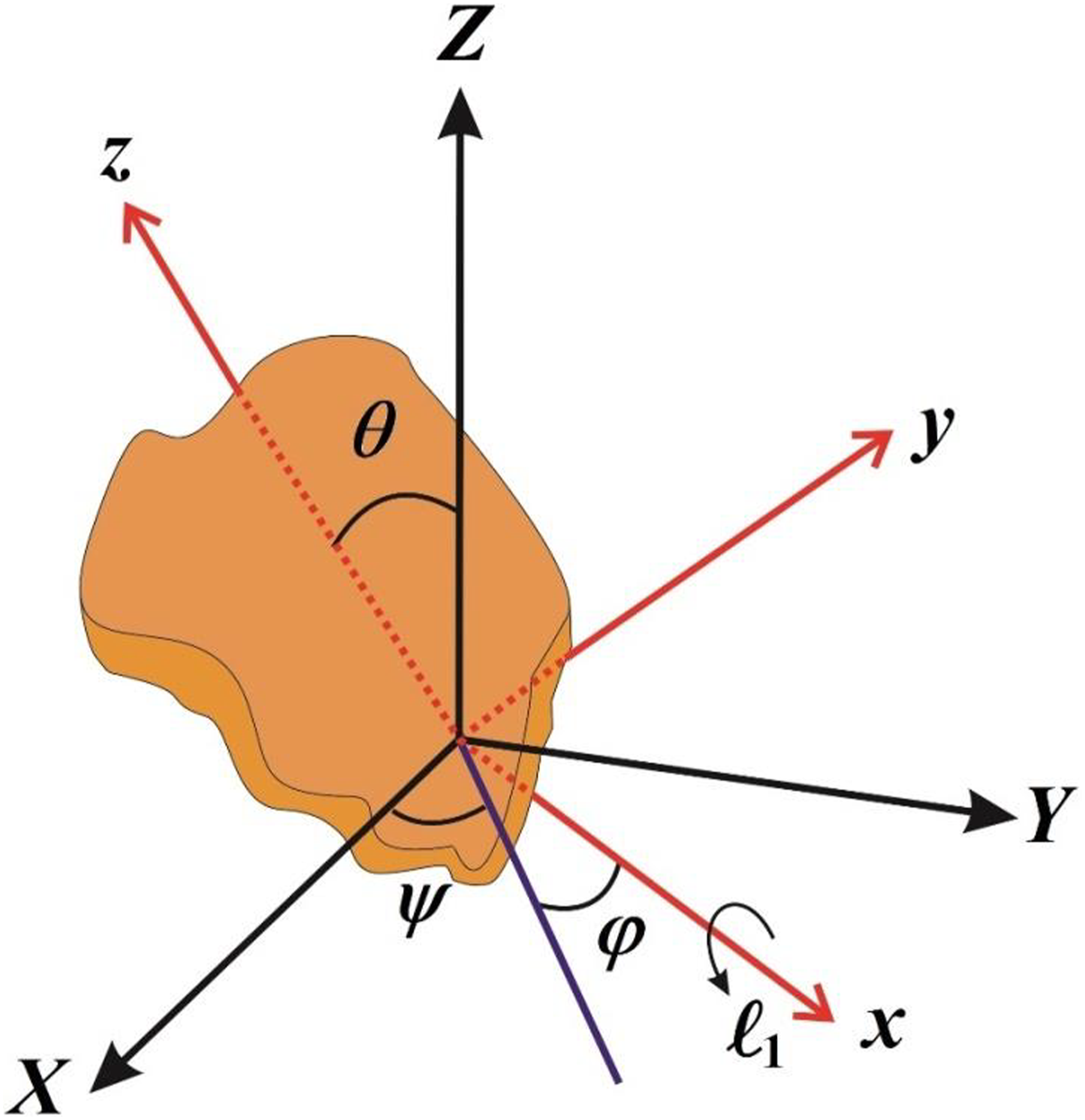
Let’s examine the conditions outlined in Euler’s case,41,42 where the center of mass of the body coincides with point


Let

It’s crucial to acknowledge that (1) includes a deliberate constraint as a fundamental aspect of the problem’s simplicity. Thus, we posit that the moment of inertia is directly proportional to the linear resistance moment exerted by the force. Moreover, building upon the earlier information, we propose a hypothesis regarding the allowable torque magnitudes


As noted in (3) and (4), the variable

The objective at hand is to attain a precise solution to the problem posed by equations (1)–(5) without resorting to any perturbing assumptions regarding the various physical parameters of the body. Therefore, in order to forecast the relevant path
The solution’s procedure
In this specific section, our focus shifts towards examining the solution for synthesizing optimal control, taking into account the external impact of linear resistance forces. As demonstrated in Refs. [15,17], through dynamic programming and Schwartz’s inequality, we can devise a control law aimed at minimizing the time required

To streamline this problem, we can approximate value
Thus, we may obtain the resulting scalar equation and the

If we presume that the variable

Considering that

This aspect can be thoroughly scrutinized and expanded upon subsequently. Regarding the kinetic energy of the gyrostat, designated as

Recalling the explicit expression of

Now, we proceed to determine the value of the modulus

where
Taking into account the information provided, the function

It is clear by looking at
Making use of (1), (6), (9), (11) and (13), we can differentiate

The preceding equation (14) can be solved in
The required controlled and optimized motion
In this section, we embark on an alternative processes to solving system (1). Thus, we can express this system in vector formula as follows

As previously described, the notations

Subsequently, one can express

Utilizing the aforementioned equations, we can articulate system (15) as follows

Taken into consideration the substitution

Bringing that


The prime notation is employed to denote differentiation regarding the variable


Upon scrutinizing this system, it becomes evident that it shares similarities with Euler’s dynamic system governing the unrestricted motion of the RB. Consequently, it can be seamlessly integrated. To achieve this goal, we employ the inner product of this system with the variable

Upon integrating the aforementioned equation, we attain a comparable expression of the kinetic energy44


Now, we will proceed to derive the analytical solution of equation (23), taking into account the given condition
Based on (25) and (26), the expressions of

From the second equation of system (23), we can readily obtain the following first derivative of

Substituting equations (27) into (28) to get an explicit first-order DE regarding
Now, let’s consider two potential cases that exhibit distinct relations between
The first case
Let’s look at the case

By differentiating the first equation in (30) and substituting into equation (28), yields

Substituting

Hence, equation (29) can be expressed in terms of the new variables as

At
Combining (16) and (22) with
Therefore, we get

Upon carefully reviewing the previously given investigation, we can obtain the following expressions of
Based on the angles

The second case
Let’s analyze the RB motion when

In view of the inequality

By differentiating the first equation in equation (38) and replacing it with (28), we may get

Using (27) to substitute the expressions of


to get the below formula, which is based on equation (28)

The following is one way to express the responses to the included equations in system (23)
Similarly, the angular velocity components have the following forms
Considering that
It is anticipated that the phase plane solutions will manifest as closed curves since the treated cases
Simulation of the results
In this section, we are going to examine the achieved new results for the aforementioned two cases in the previous section

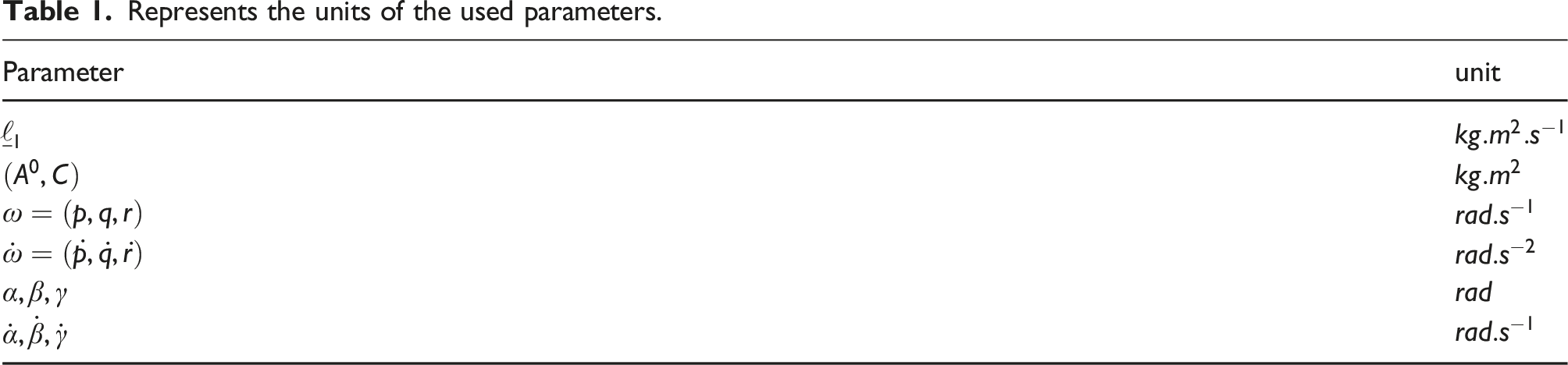
Represents the units of the used parameters.
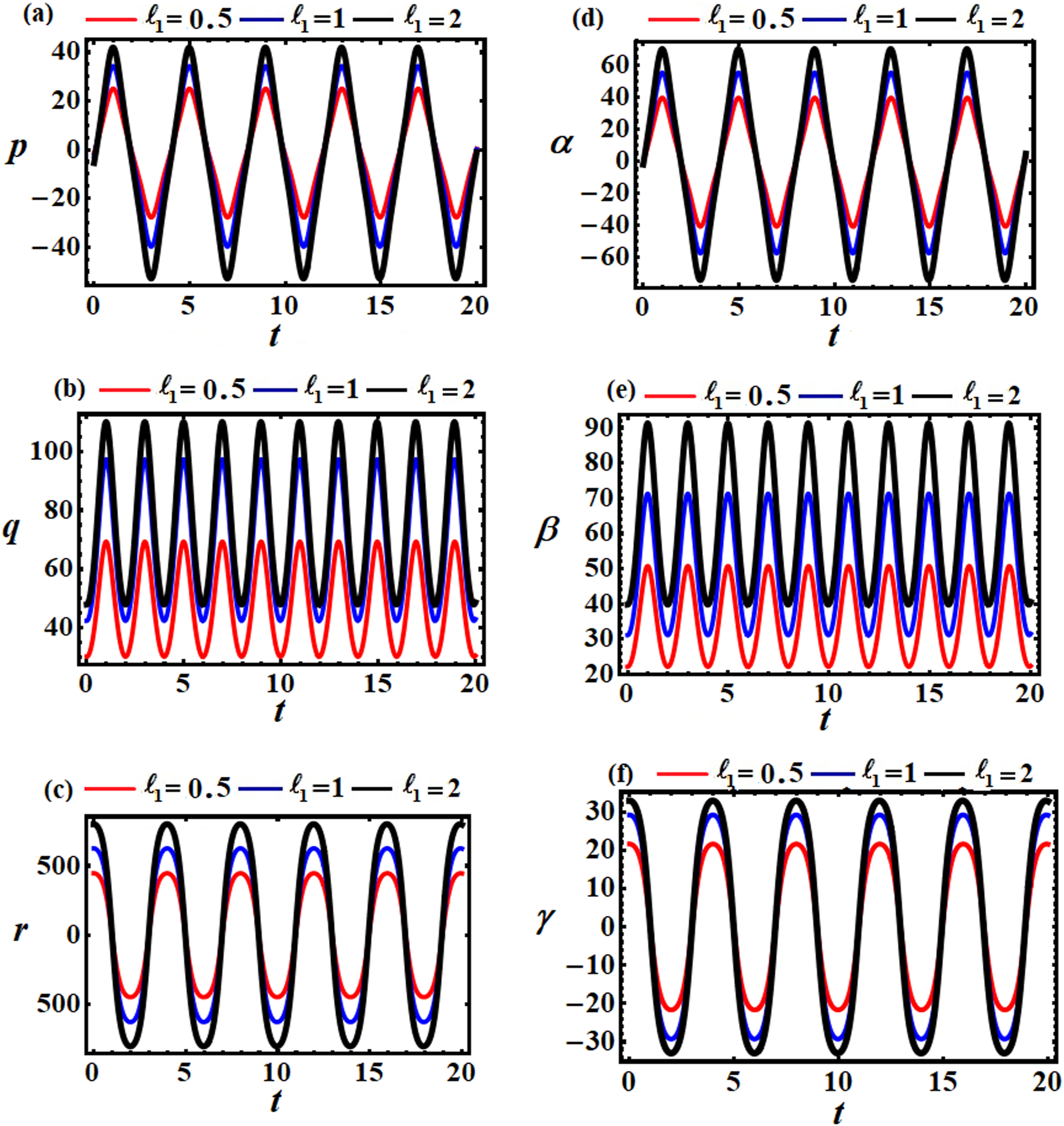
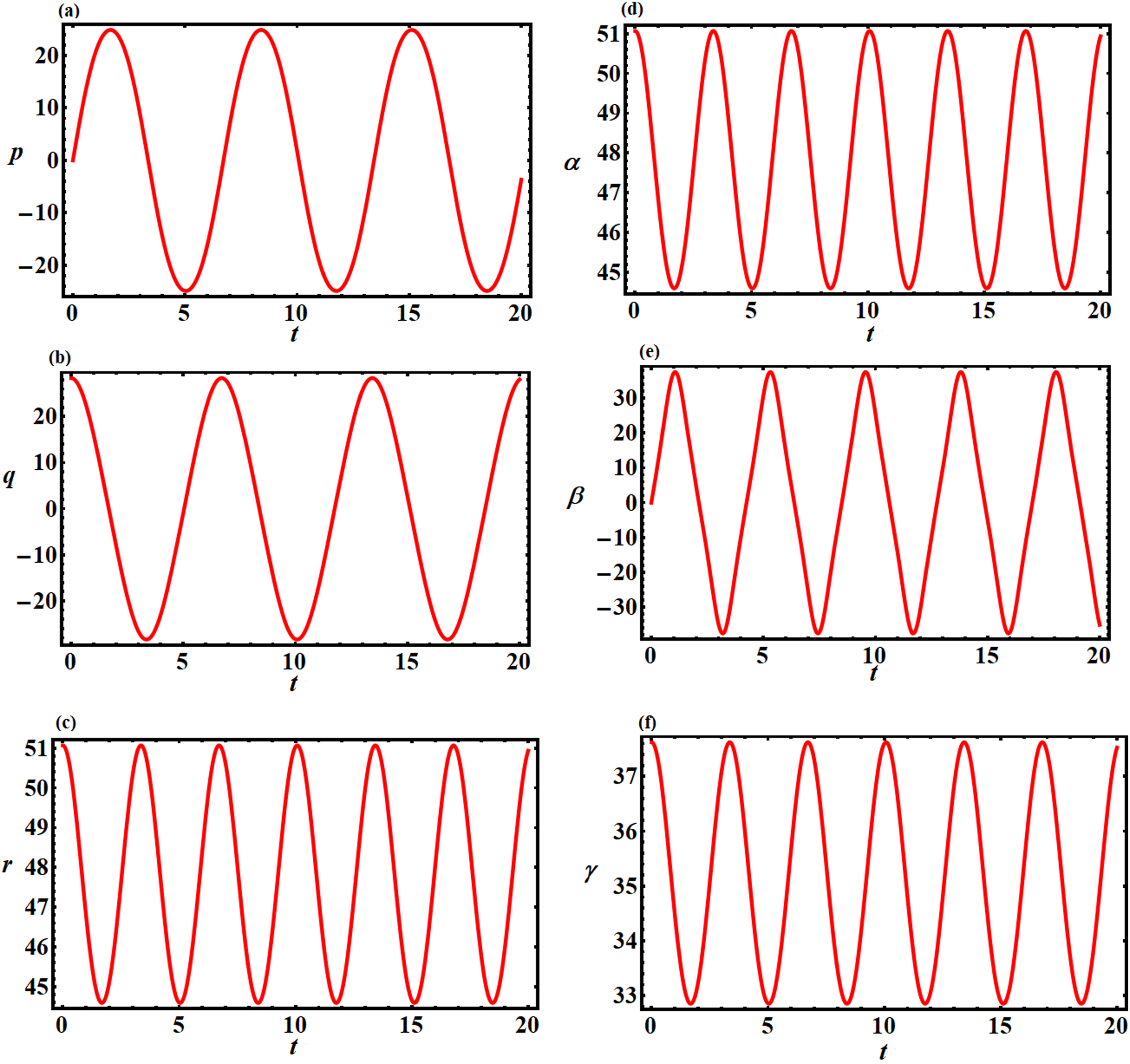
Sows the time behavior for the functions
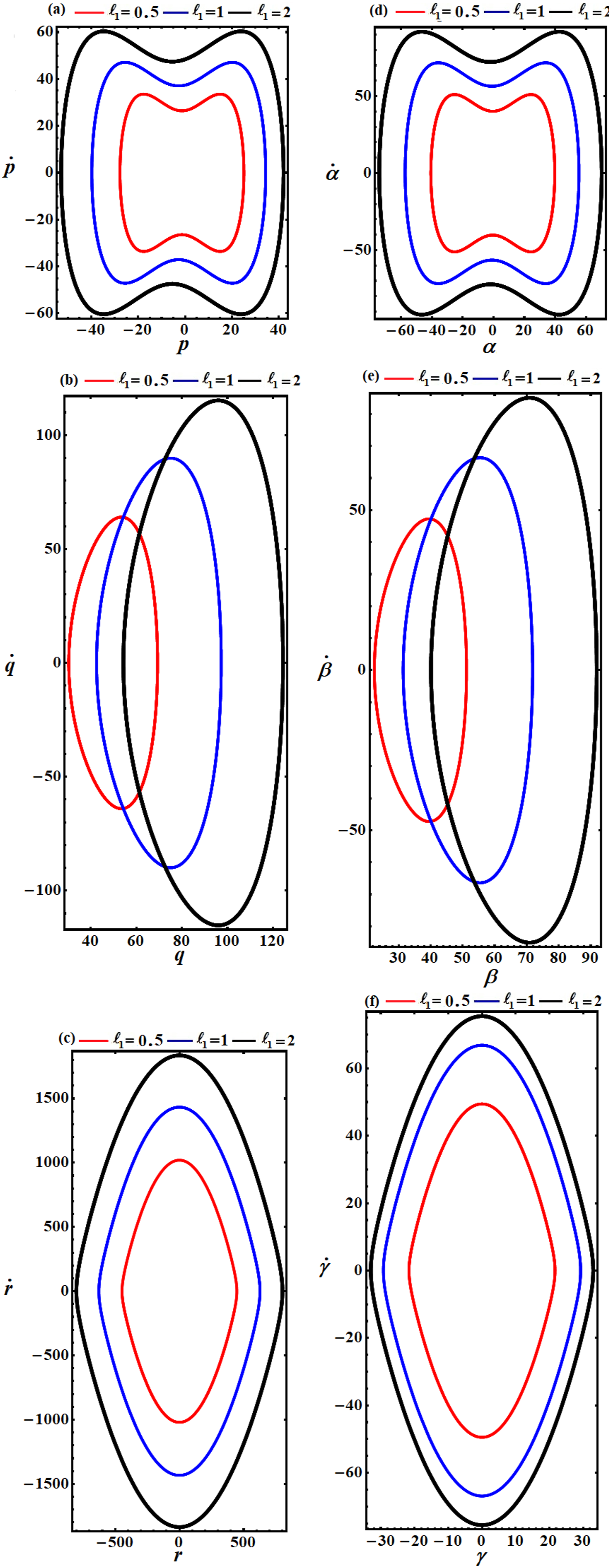
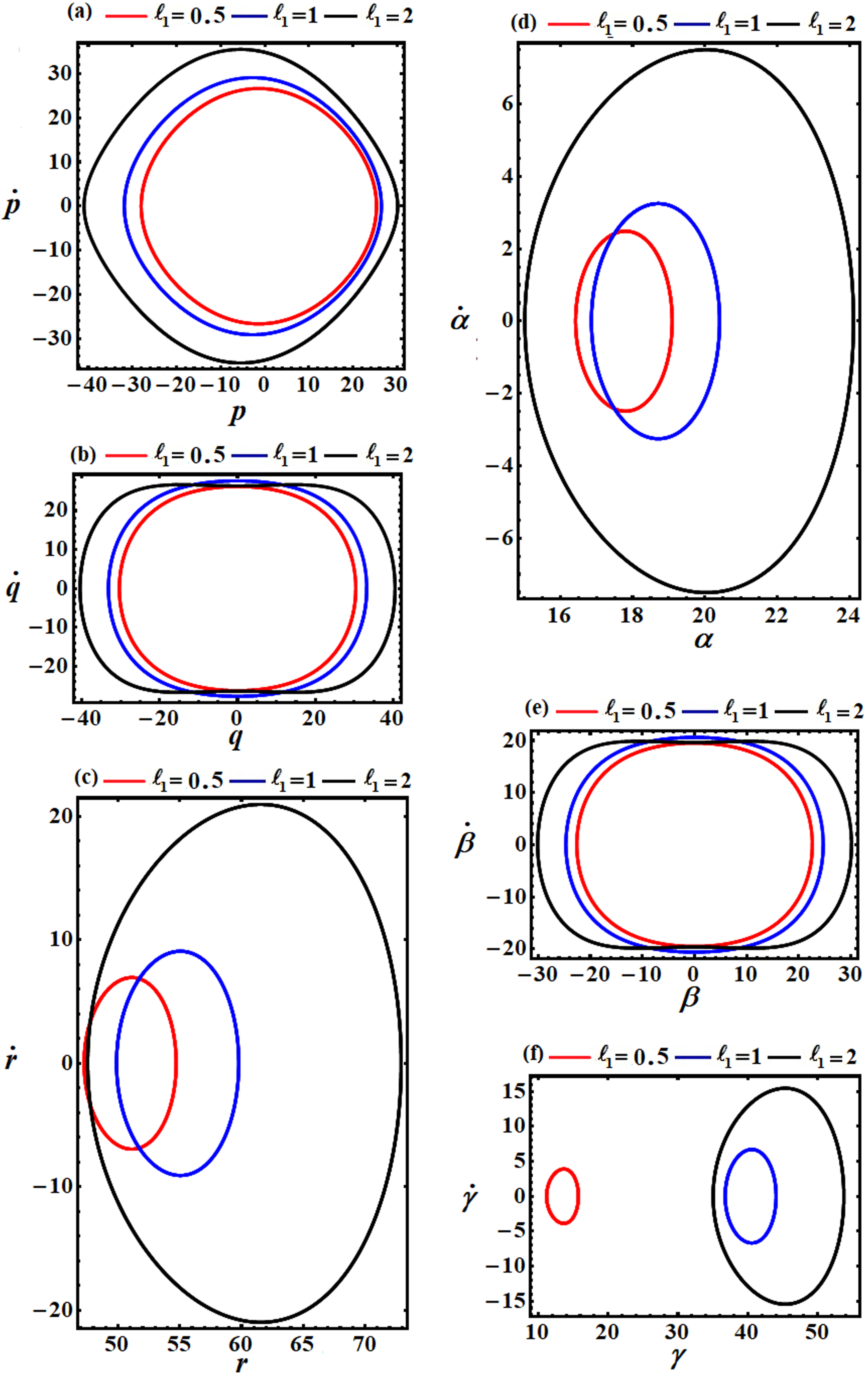
Shows the diagrams of phase plane for the plotted waves in Figure 2.
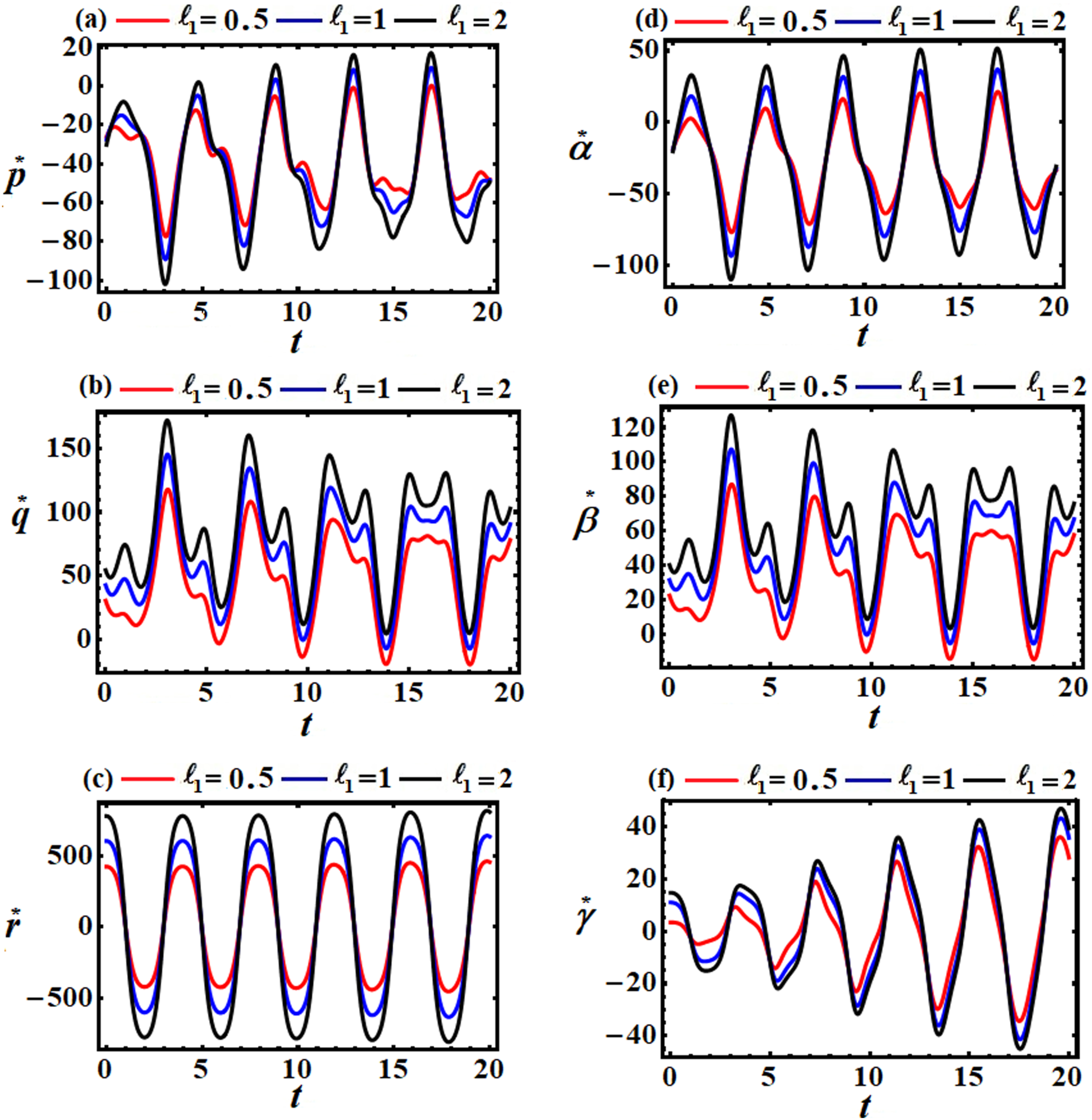
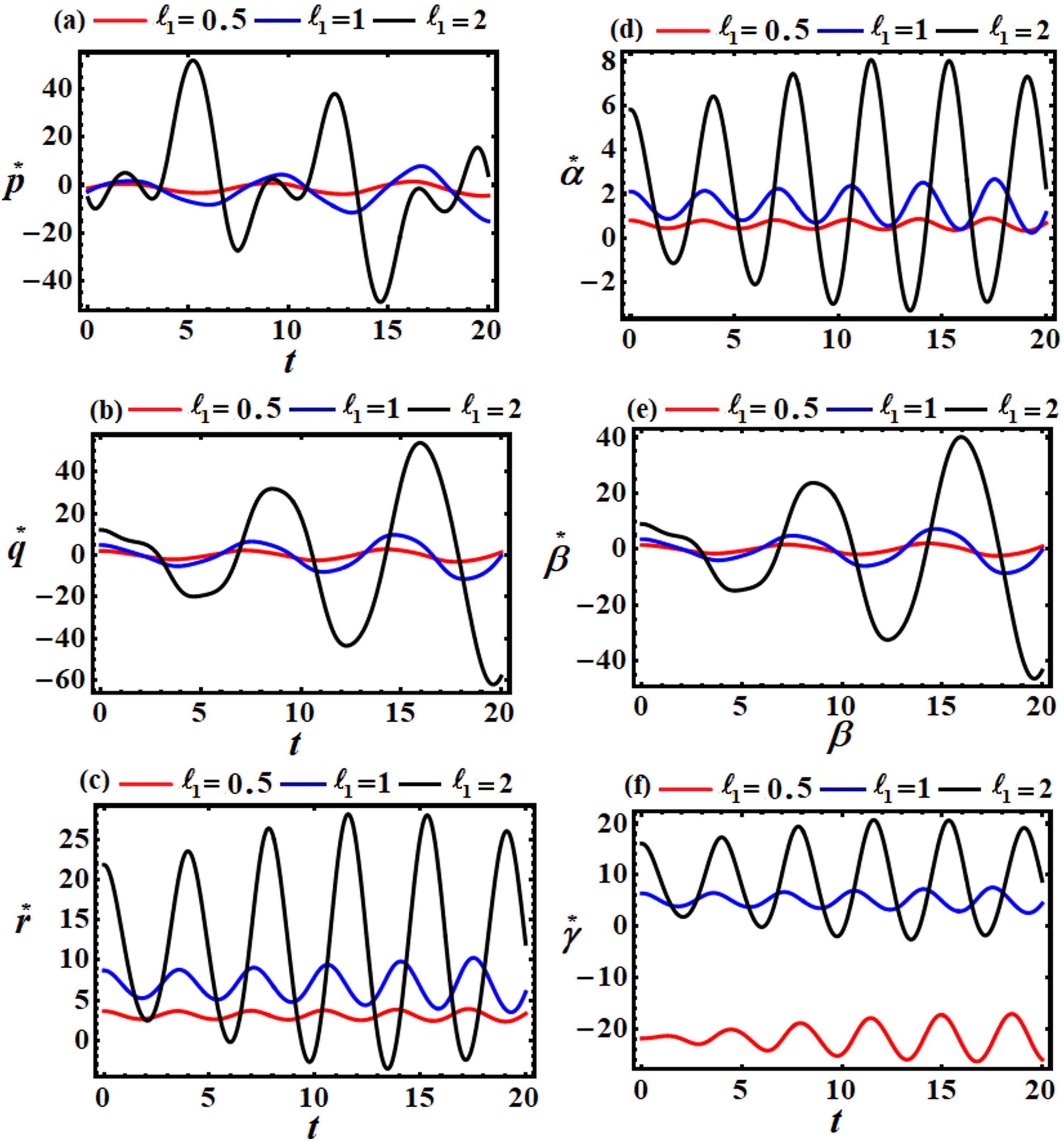
Reveals the deviations of the newly acquired outcomes and the previous ones in Ref. [20] for the first case.
The obtained outcomes are compared with those in reference [20], revealing a significant degree of congruence when
However, the drawn curves in Figures 5 and 6 are calculated in light of the second case when Presents the time behavior for the functions Investigates the trajectories for the phase plane plots in Figure 5. Portrays the difference between the achieved solutions and the obtained ones in Ref. [20] for to the second case.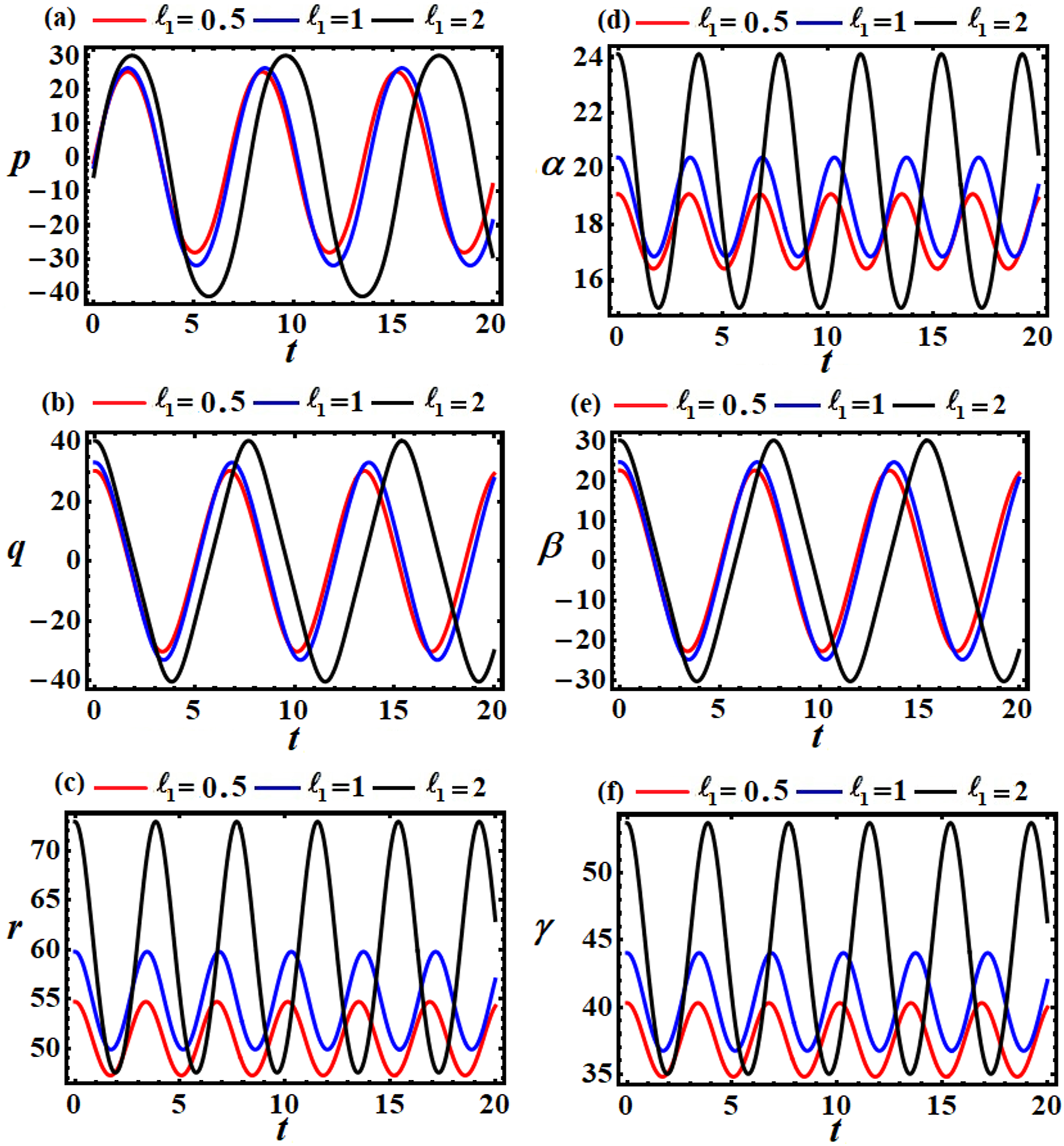
Based on the above simulation of the achieved outcomes, we can say that periodic solutions and the closed curves of their phase planes offer several benefits for the analysis and understanding of dynamical systems. These solutions indicate that a system’s behavior repeats after a certain period, making it predictable. This predictability is crucial in engineering and physics, where reliable system behavior is essential. The presence of closed curves in phase planes, representing periodic solutions, helps in visualizing the system’s long-term behavior. This visualization aids in understanding the nature of the system’s stability and the types of attractors present. Systems exhibiting such solutions often show robustness to small perturbations. This means the system can return to its periodic state after being disturbed, which is desirable in maintaining stable operations in practical applications.45,46
Drawing the difference between the current solutions and the solutions that preceded it offers several benefits in the analysis of dynamical systems. According to these differences, one can identify how the system’s behavior has evolved over time. This helps in understanding the impact of changes in parameters or initial conditions on the system dynamics. Examining the trend of differences over time can reveal patterns or trends in the system’s behavior. For instance, increasing differences may indicate instability or the onset of a new regime of behavior. Moreover, discrepancies between predicted and observed behaviors can highlight limitations or inaccuracies in the model used to describe the system. Analyzing the differences can guide model refinement or lead to the discovery of previously overlooked factors. Furthermore, comparing simulated results with other earlier data helps validate the accuracy of the simulation model. Differences beyond expected margins may signal the need for further investigation or refinement of the model.47,48
Waves in Figures 8 and 9 show the variation of the results in Ref. [20] for the first and second case, respectively, in the absences of the gyrostatic moment, that is, Portrays the solutions for the first case when Illustrates the solutions for the second case at 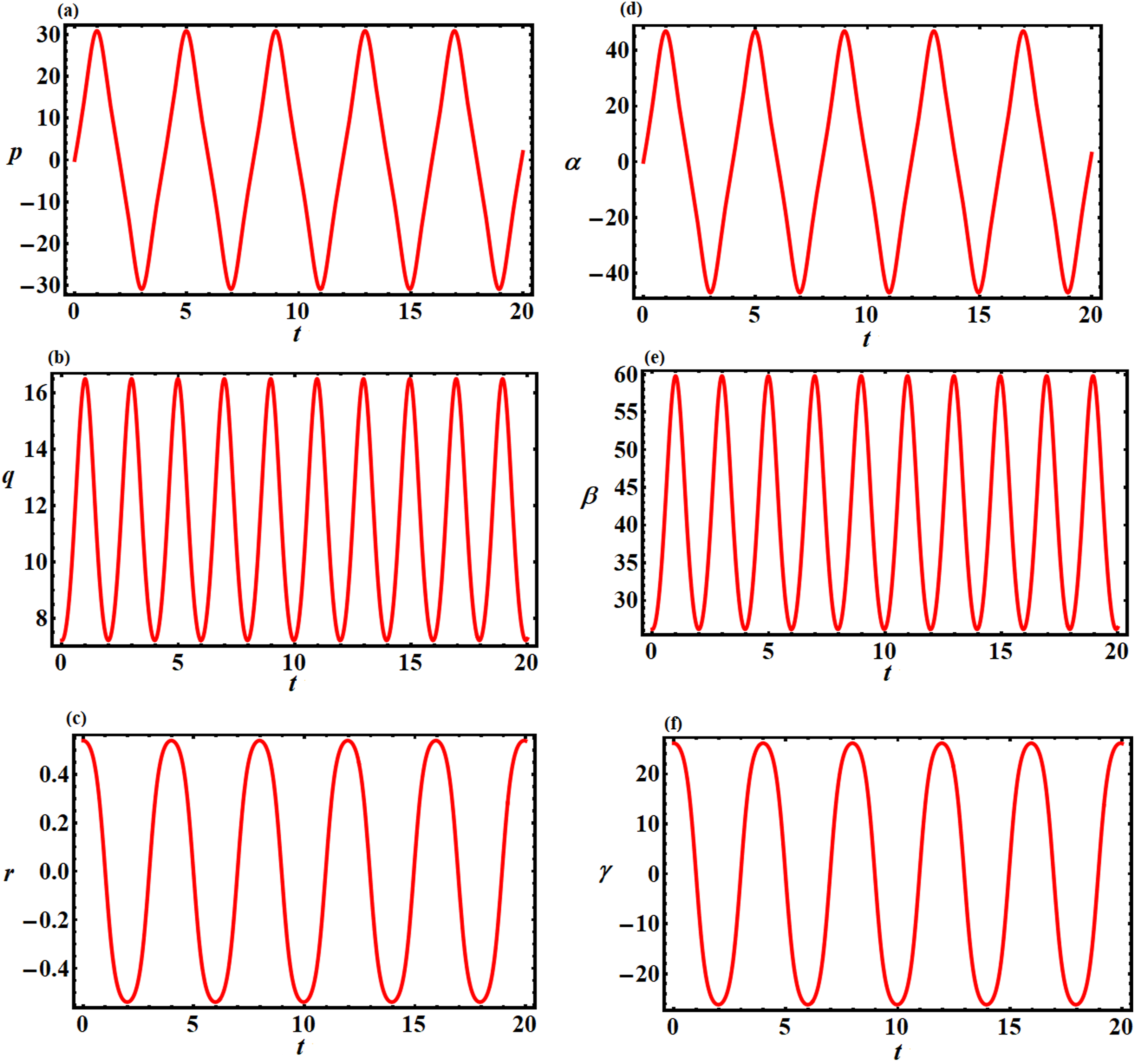
Conclusion
We have investigated an original problem related to the regulation of the deceleration minimum-time for the asymmetric rotating motion of the RB under the action of the GM in a resistive medium. For obtaining the best control and requiring the least amount of time, a well-established solution based on the Bellman function has been created. Euler-Poisson’s motion is categorized as a controlled motion that takes time-dependent angular momentum into account. Two possible cases for the RB’s motion have been examined, taking certain kinetic energy and angular momentum values into account. The obtained results are graphically displayed to demonstrate the remarkable impact of the GM and the several chosen parameters of the body on the controlled movement. The analysis of the outcomes in Ref. [20] reveals a remarkable agreement with the achieved solutions, particularly in the absence of the GM besides the values of the first two principal axes must be unequal. To highlight the importance of the obtained outcomes in the current study, the difference between our results and the earlier ones has been graphically shown. Overall, drawing these differences enhances understanding, facilitates model validation and refinement, guides decision-making, and supports optimization efforts in the analysis of dynamical systems. The purpose of the phase plane graphs is to show and disclose the motion analysis’s stable state. This study is noteworthy because it applies gyroscopic theory to real-world problems, such as tracking the path of ships and aircraft, and maintaining the balance and stability of vehicles.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
The sharing of data is not relevant to this article since no datasets were created or analyzed during the present study.