
Abstract
The 3D modeling analysis for the rotary motion of an asymmetric rigid body (RB) that gains a charge is presented. Under the effect of a gyrostatic moment (GM), an electromagnetic force field (EFF), time-varying body-fixed torques (TVBFTs), and constant axial torque (CAT), Euler’s equation of motion (EOM) is derived to describe the body’s EOM. The process is to derive the analytic solutions for the general attitude motion of the RB that is nearly symmetrical; therefore, a novel analytical solution for the angular velocities of the body has been approached. These new solutions are obtained by considering torques that vary over time and expressing them as integrals. Additionally, a novel closed-form evaluation mechanism for these integrals is offered. Specifically, the case of a constant torque around the spin axis and transverse torques represented by polynomial functions of time is explored. When dealing with an axisymmetric RB subject to a CAT, the solutions obtained from Euler’s EOM are exact. However, it is important to note that novel analytic solutions for the Eulerian angles are approximations, as they rely on the assumption of small angles. Nonetheless, these approximations have broad applicability to a wide range of practical problems. The method’s precision is demonstrated through the graphical simulation of the proposed solutions. Additionally, a computer program is utilized to create diagrams and phase plane curves, highlighting the contribution of various body parameters to the motion. These plots depict the contributions of various values regarding GM, charge, and CAT. Motion stability is also examined through phase diagrams. In addition to presenting novel solutions and outcomes for the problem, this study plays a vital role in multiple scientific and engineering fields as it has the potential to optimize mechanical systems, explain celestial motion, and improve spacecraft performance.
Introduction
The study of the 3D rotary motion of RBs plays a crucial role in various fields, ranging from robotics and aerospace engineering to biomechanics and physics. Understanding the complex interactions and behaviors of RBs in 3D space is essential for designing efficient control systems, predicting structural stability, and optimizing performance in a wide range of applications. Many scholars have dedicated their attention to this subject, as evidenced by the extensive body of research conducted by experts.1–29 In Refs. 1, 2,1,2 the problem’s EOM consists of three nonlinear differential equations (NDEs) that have been addressed into special cases with the four first integrals to assemble its solution. In Ref. 3, 3 the presentation of equations illustrating Euler’s angles in various sequences has been provided. In Ref. 4,4 as a follow-up to the assessment honoring St Petersburg State University’s 300th anniversary, the authors examines the research accomplishments of the St Petersburg School of Mechanics in the area of RBs’ dynamics. Specialists from St Petersburg State University conduct fundamental theoretical studies in the subsequent part on the controlled and uncontrolled motions of a RB. In Ref. 5,5 a new approach is presented to depict the turn-tensor of an asymmetrical RB using the moment of momentum vector. The author highlights the similarity between the rotational behavior of an asymmetrical RB when subjected to a moment directed along its axis of symmetry and when influenced by a constantly directed moment. Additionally, an accurate solution is derived for the problem, considering the influence of linear viscous friction. In Ref. 6, 6 an examination is conducted on the movement of an RB around a stationary point, influenced by a Newtonian force field (NFF). The motion is described using the Euler–Poisson equations. To find the precise solutions for these equations, it is generally necessary to have a fourth algebraic first integral. By determining the essential and comprehensive condition, the authors establish which functions can serve as the fourth first integral for governing EOM. In Ref. 7, 7 two additional solvable problems in RB’s dynamics are introduced, elucidating the dynamics occurring within both a Euclidean plane and a pseudo-sphere. In Ref. 8, 8 a study has successfully obtained closed-form analytic solutions for the 3D movement of a nearly symmetrical RB under the influence of TVBFTs. These solutions are expressed in the form of specific integrals. The research specifically focuses on two scenarios: one where there is a constant torque acting along the body’s spin axis, and another where transverse torques are represented as polynomial functions of time. In Ref. 9, 9 the rotary movement of a charged RB is discussed, focusing on RB’s angular velocities solution. The RB in the study possesses a spherical cavity, which houses a viscous liquid that cannot be compressed. The study takes into account various factors such as the presence of a GM, constant body-fixed torques (CBFTs), and the impact of torque resulting from a resisting force caused by the liquid’s shape. In Ref. 10, 10 the authors examine the resolution to address the dynamic movement of RBs featuring cavities filled with a viscous fluid and exposed to CBFTs. The objective is to analyze the RBs’ motion concerning their center of mass, in addition to their orientation and stabilization. To achieve this, the authors utilize the Krylov–Bogoliubov method, which proved effective even at low Reynolds numbers. In Ref. 11, 11 a novel mathematical approach is presented to address the conventional dynamic Euler’s NDEs. This approach specifically focuses on the movement of an RB that is unrestricted in its rotational motion around a fixed point. The foundation of this novel solution lies in a recently developed mathematical framework that deals with precise analytic solutions for Abel’s NDEs of the second type. In Ref. 12, 12 a novel micropolar continuum model, consisting of particles with two spins, is introduced. The first component has the capability of both translational and rotational degrees of freedom, whereas the second component is restricted to rotational degrees of freedom exclusively. An essential characteristic of this model is that neither of the components can be considered infinitesimally RBs. By making a simplifying assumption, the suggested EOMs can be transformed into equations similar to Maxwell’s equations (MEs). An additional simplifying assumption in this context leads to the derivation of an equivalent of the Lorentz force. In Ref. 13, 13 the authors provide an overview of efforts to understand ME from a mechanical perspective. They discuss and compare three different interpretations: Early interpretations that relied on linear elasticity; Zhilin’s perspective, which sees the aether and electromagnetic waves as existing within a micropolar medium and propagating through it; and Ivanova’s viewpoint, which expands upon Zhilin’s ideas to include the concept of charge and the generation of charged particles and antiparticles within the micropolar framework. In Ref. 14, 14 the concept of transforming images of physical quantities between different observers is discussed by researchers. This transformation helps to reveal inertial terms in the balances of linear momentum and spin. The paper also briefly reviews existing literature on this topic and explains the typical method of conducting such transformations. In Ref. 15, 15 the researchers use mechanical comparisons to explain the magnetic and electric induction vectors, electric current density, and electric charge density. By applying these analogies, they derive a series of DEs that align with the first ME, the Gauss law for electric fields, and the charge conservation law. One point of contention in their findings is the potential revisions to the Maxwell–Faraday equation and the Gauss law for magnetic fields. The investigation of an RB in 3D space, possessing a smooth surface of any shape, as it moves within an unbounded liquid, under the influence of a predetermined external force and CBFT, has been discussed in Ref. 16. 16 The author demonstrates that if the provided data are sufficiently regular and of small magnitude, and if the external force and CBFT gradually diminish over time, then a comprehensive and robust solution for the initial boundary value problem associated with this scenario is assumed to exist. Additionally, this solution tends to diminish and converge toward zero as time approaches infinity. In Ref. 17, 17 a study exploring the rotational movement of an unsymmetrical RB when exposed to CBFTs and GM is presented. The analysis considers two situations involving CBFTs. In the first scenario, the torque is applied along either the minor or major axis, while in the latter, it affects the middle axis. In both instances, the authors present innovative analytical and simulation results. In Ref. 18, 18 Euler’s EOM and the momentum equation for a charged particle, influenced by the Lorentz force in non-relativistic scenarios, witness the implementation of a novel solving procedure. An analytic algorithm is introduced to solve the momentum equation, which is simplified to three NDEs involving the particle’s velocity components. Additionally, groundbreaking partial analytical solutions are discovered for specific instances involving magnetic fields. In Ref. 19, 19 an analysis is conducted on periodic solutions for a specific type of vibrating motion exhibited by a gyrostat that is attached to a spring. The gyrostat experiences the impact of a gyrostatic couple, in addition to the effects of NFF and EFF. Additionally, the results of this analysis include the derivation of solutions and the visualization of phase diagrams, which effectively portray the periodic nature and stability characteristics of these solutions. In Ref. 20, 20 an investigation focuses on the disturbed rotational movements of an RB, which bear resemblance to the scenario of a Lagrange top. This RB is subjected to gradually changing forces in the form of restoring and perturbing torques. By utilizing an asymptotic approach, the researchers are able to derive qualitative findings and provide a simplified description of the motion’s evolution through averaged equations. In, 21 the authors introduce a solution to address the rotational movement of a symmetric charged RB that is connected to a spring and rotates around a fixed point. The RB is affected by an NFF as well as external torques such as perturbing, restoring and GM. These solutions are visually represented in graphs to demonstrate the beneficial effects of the RB’s parametric values on its behavior. Additionally, the impacts of applied moments, EFF, and the NFF are considered and analyzed. The RB’s rotation around a stationary point in a central NFF is examined in Ref. 22. 22 It is thought that the RB’s ellipsoid of inertia is randomized and that the mass center does not always coincide with the point that is stationary. When the natural frequency value equals 13, another model of the RB under the influence of an NFF is examined in Ref. 23. 23 This singularity is discussed in Ref. 22 22 and has to do with classifying various bodies based on their moments of inertia. A similar study for a nonsymmetric rotating RB in a central NFF is presented in Ref. 24. 24 Extending the authors’ solutions for the tilting problem of an RB’s center of mass under the impact of minor inner or outer torques is the primary goal in Ref. 25. 25 In Ref. 26, 26 the researchers extensively examine the stability of specific movements exhibited by a RB around its fixed point under the influence of EFF and NFF. The RB carries a rotor that continuously rotates at a constant angular velocity along an axis parallel to one of its principal axes. The researchers meticulously derived the EOMs and skillfully formulated them into a Lie–Poisson Hamilton system. To ascertain stability, the energy-casimir method is employed, yielding sufficient conditions. To visually portray the stability, the researchers graphically present the regions of linear stability and Lyapunov stability for specific parameter values. In Ref. 27, 27 the focus is on investigating the optimal deceleration of a dynamically asymmetric RB. To achieve this, the researchers utilize nondimensional variables, which allow them to establish a comprehensive system of EOM with multiple parameters. In Ref. 28, 28 a study is conducted on analyzing the rotary motion of a symmetric RB about a fixed point and influenced by a perturbing moment vector, GM, along with a variable restoring moment. By employing mathematical techniques, the averaged EOM is derived for both the first and second approximations. In, 29 the authors examine the inertia-driven movement of a system comprising two RBs connected by a cylindrical hinge. The first is arbitrary, while the second is the dynamically symmetrical rotor. In the absence of external forces, the system initially moves around the center of mass similar to an RB according to Euler’s principles. Once the rotor is released, it starts rotating in a manner that maintains a constant projection of its absolute angular velocity along the axis. When the relative rotational speed approaches zero, the latch can be engaged without any energy loss. Consequently, the original trajectory of the body changes. More investigation for the cases for a RB under external torques are conducted in Refs. 30–36.30–36 The authors derive the analytical solutions for the RB motion under the effect of GM in Ref. 30 and 31.30,31 While in Ref. 32, 32 the authors present a detailed solution for all the parameters that could be conducted approaching also to the analytically of the solution. The solution for the governing EOM for a RB including a viscous incompressible fluid is derived in Ref. 33. 33 In Ref. 34, 34 under the influence of GM and magnetic field on the RB motion besides the action of the NFF in accordance with the Bobylev–Steklov conditions, the authors approach the analytical approximated solution for the RB’s EOM. The small parameter method of Poincare is used in Ref. 35 35 to approach the solution for both Euler and Poisson EOMs as the RB in such a case moves under the impact of GM inside the NFF. In addition to a solution for Euler’s angles concerning this problem. In Ref. 36, 36 the authors introduce a novel approach for solving the EOM for the trapped orbits of an infinitesimal mass within a space trap, moving in close proximity to a planet in the context of the elliptic restricted three-body problem (ER3BP). A unique solving method is employed to determine the coordinates of the infinitesimal mass and its orbit near the planet. In Ref. 37, 37 the authors propose that considering the strain measure in this way could offer new opportunities for understanding the mechanisms related to substance diffusion into solids. To address these challenges, they recommend including a source term in the strain measure’s balance equation. In Ref. 38,38 a study that examined the movement of a magnetized axisymmetric RB around its center of mass in a circular orbit while considering the gravitational and magnetic influences of the central body is presented. The EOMs are converted into equations describing the motion of a charged particle in the presence of both electric and magnetic fields. The stationary movements of the system are identified, and periodic movements close to these are created using the Lyapunov theorem of the holomorphic integral. An analysis of the analytical solution of a free rotatory movement driven by a motor with restricted capacity is carried out in Ref. 39. 39 The author’s major goal is to show that the main body’s movement closely approaches revolution around a stationary axis, given specific parameters and initial circumstances.
This paper presents a 3D modeling analysis that focuses on the rotary motion of an asymmetrically charged RB. The motion is influenced by various factors, including GM, EFF, TVBFTs, and CAT. To describe the RB’s motion, EOM is derived. The goal is to discover analytical solutions for the overall attitude movement of the nearly symmetrical RB, specifically focusing on the analytical solution for the body’s angular velocities. The analytic solutions are obtained by considering TVBFTs and expressing them as integrals. There is also a methodology provided for evaluating these integrals in a closed form. The analysis particularly explores the constant moment’s case about the axis of spinning and transverse moments represented by polynomials of time. When a symmetric axial RB is subjected to a CAT, the solutions derived from Euler’s EOM are exact. However, it is important to note that Eulerian angles’ solutions are approximated, as they rely on the assumption of small angles. Despite this limitation, these approximations have wide applicability to various practical problems. The accuracy of the method used is demonstrated through graphical simulations of the proposed solutions. In addition, a computer program is employed to generate diagrams and phase plane curves, which illustrate the impact of various body parameters on the body’s behavior. These diagrams specifically highlight the impact of GM, charge, and CAT values. Furthermore, the motion stability is examined through phase diagrams.
Analytical solution for the RB’s angular velocity
Analytical solution of a RB’s angular velocity is examined in this section. To consider such a model, double frames with an origin Presents the RB’s model.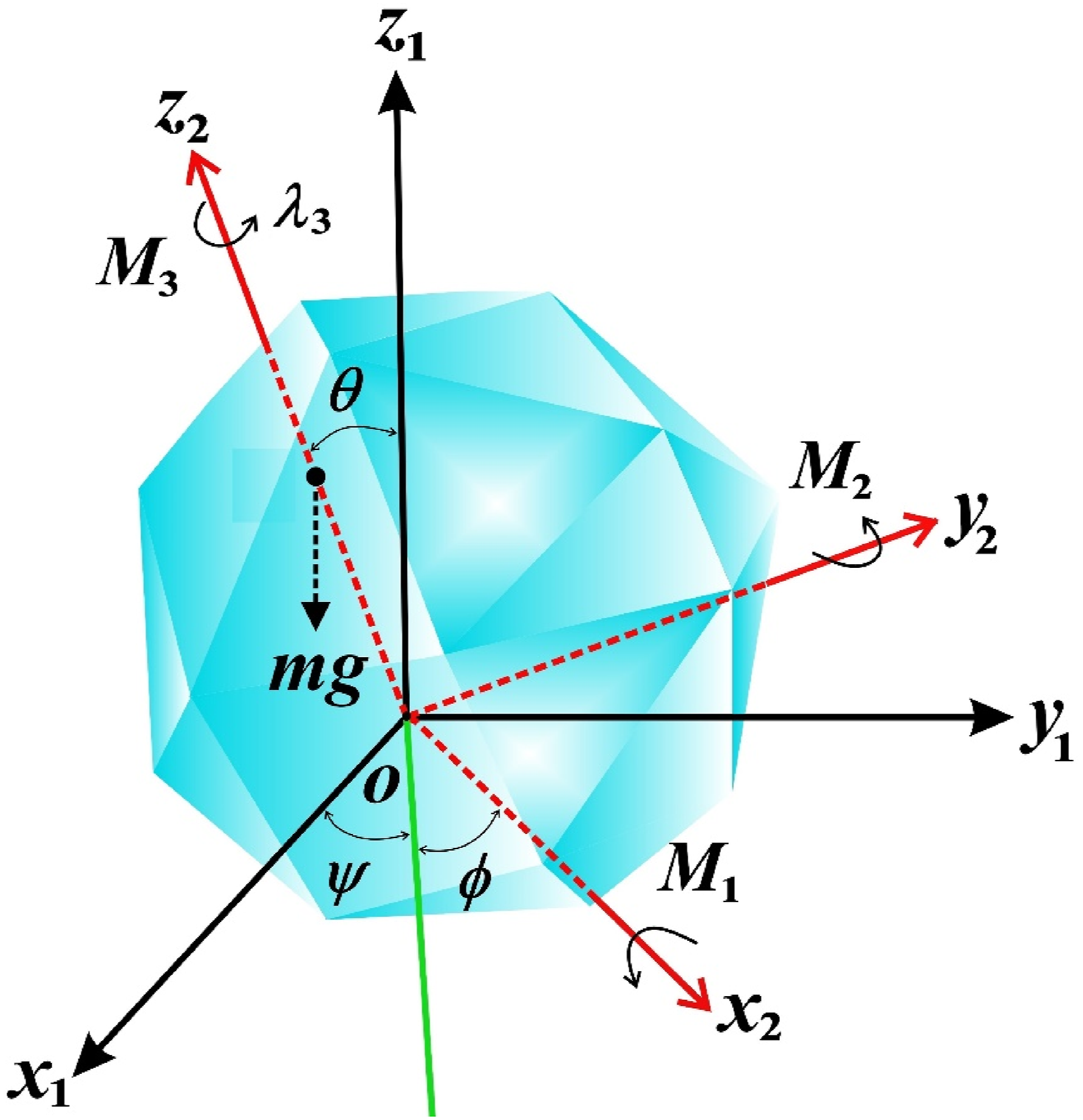
Therefore, the Euler’s EOM1,8,32 is given by
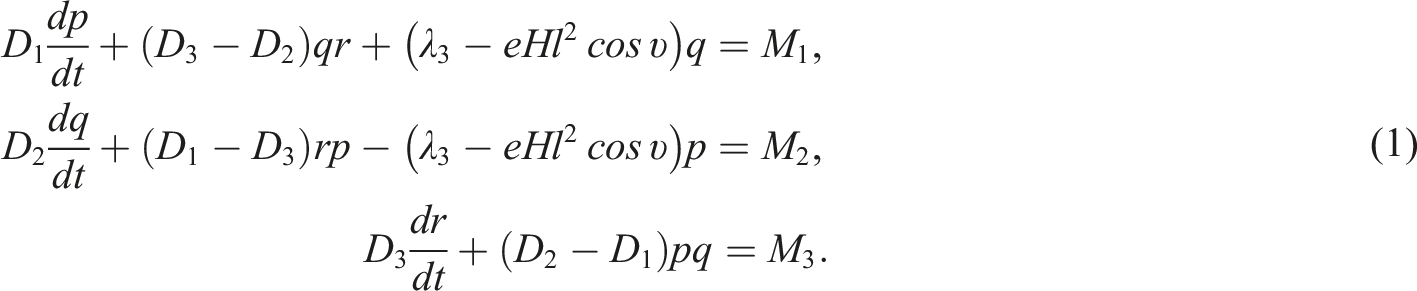
At present, there are no apparent solutions in the form of explicit analysis for this system of NDEs when considering arbitrary functions of the BFTs
Assuming that only

Utilizing equation (2) provides a way to separate the third-order system of NDEs in system (1). Hence, if equation (2) is considered valid, the focus can solely be on the first two equations in system (1), which now form a coupled, interconnected but linearly time-dependent set of DEs. Utilizing this adjustment in the new independent variable can help streamline this process as


System (2)’s first and second equations are written as follows:
Defining the following new variables once more

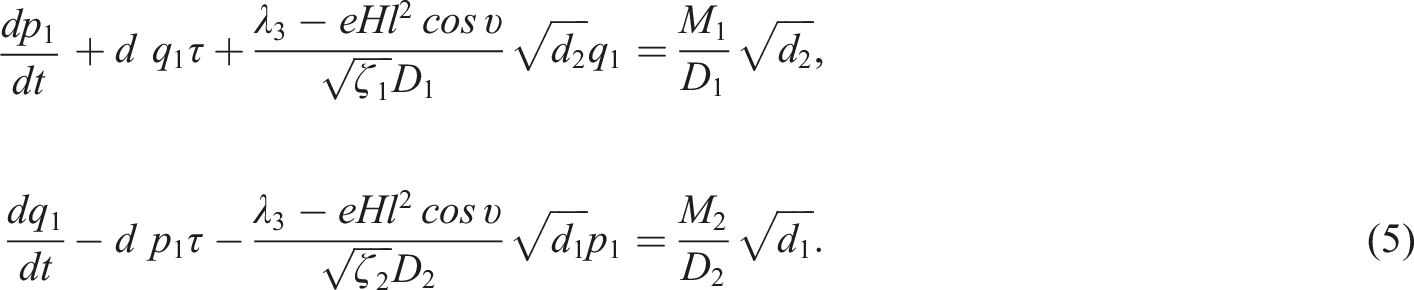
Using the new variable

As a result, system (5) turns into

When



Multiplying both sides of (10) by

Integrating both sides of (12) concerning


In a particular scenario where the transverse torques, denoted as

Considering


Substituting into (14) implies


Putting

Equation (19) turns into

Since the special integral (incomplete gamma function) gives

Therefore, equation (21) becomes

Hence, equation (13) transforms into


To obtain the ultimate solution for
Analytical solution for Euler’s angles
By employing a sequence of Euler angles denoted as
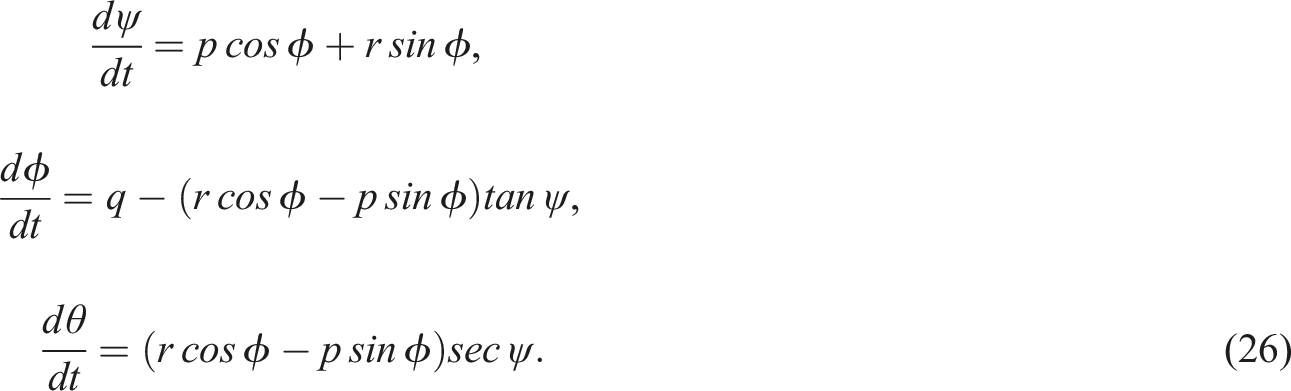
A small angle approximation for

The solution to (27)’s third equation is


Defining the variables listed below

As a result, equation (29) becomes

Inserting the new independent variable


Equation (32) embodies a linearly time-dependent DE. It operates within the complex plane, where the complex angle denoted as







Hence, to derive the values of Euler’s angles, it is necessary to assess equations (39) and (40). It is important to remember that the solution for



By replacing the variables indicated in equations (41)–(43) with those given in equations (39) and (40), one obtains


The calculation of the first integral in equation (44) is performed by

Substituting


Using the special integral (imaginary error function)

Therefore, the solution for

By employing analogous procedures, the value of the first integral in equation (45) becomes equivalent to

Now, turning our attention to the second integral in equation (44), it is expressed as follows

Using the recurrence formula for

Since, one readily computes

By employing the aforementioned recurring formula, one can simplify the assessment of the integral


The computation of the integral in equation (56) can be effortlessly determined using the following

Hence,

Using equation (23) to evaluate

Therefore, equation (55) becomes

Hence, equations (44) and (45) take the forms


As a result, the final form of equation (38) is
Results’ discussion
The main purpose here is to showcase a visual simulation that illustrates the analytical solutions for various parameters, including angular velocities and Euler angles. Additionally, it offers an explanation of the stability characteristics of the motion. So, the following data is considered to reach these results as

The subsequent subsections will present a study on the analytical solutions to the problem, which will be explored through three different scenarios:
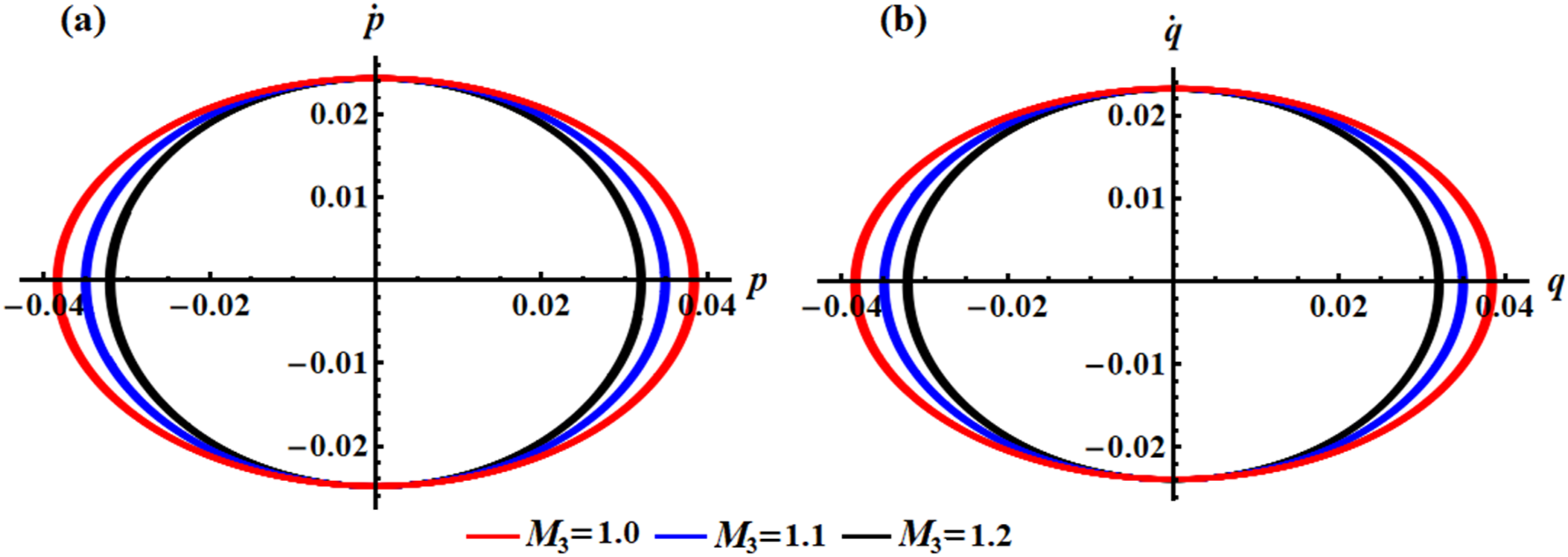
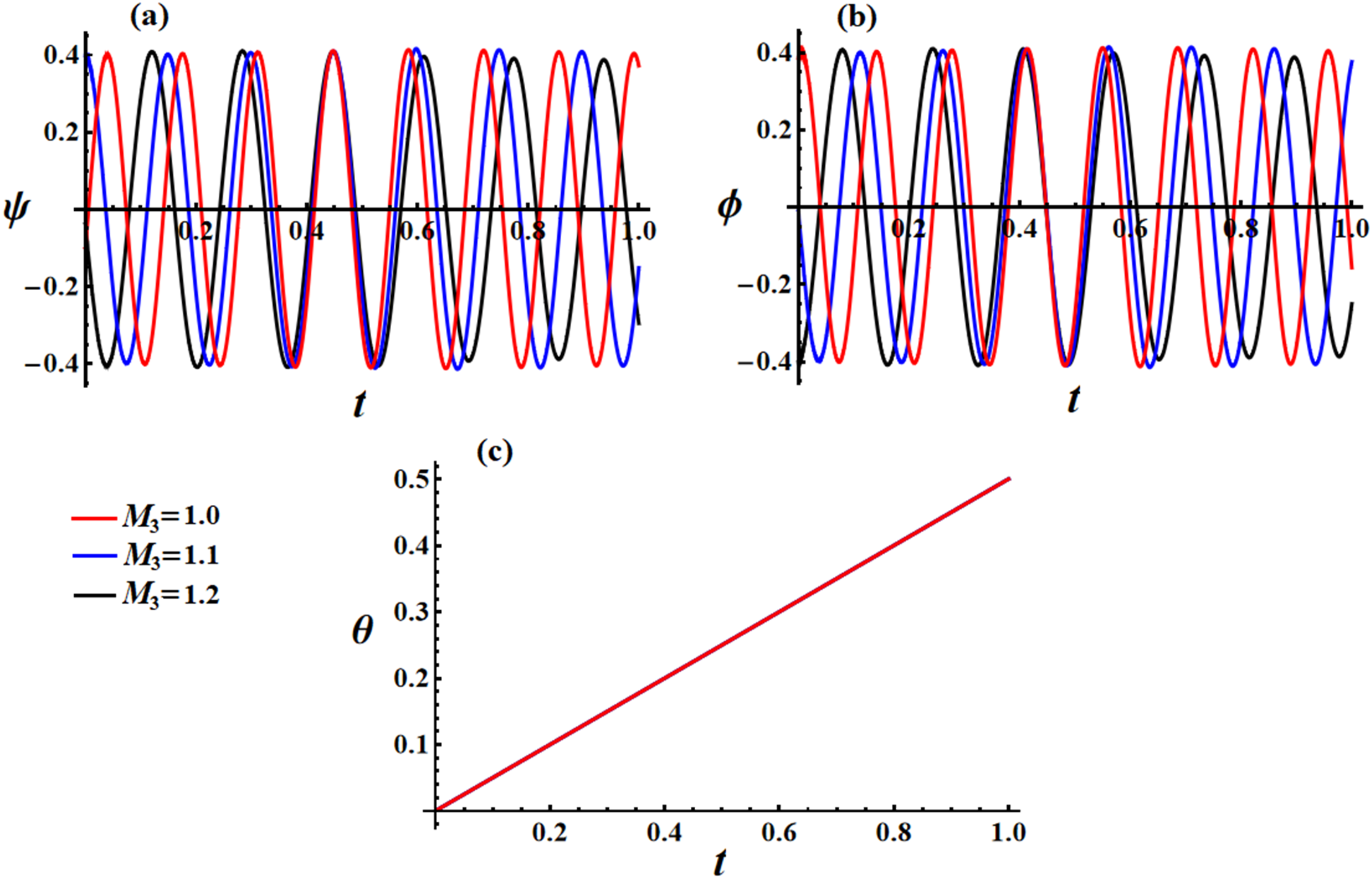
The influence of the GM
To analyze the contribution of the GM on the motion, a simulation at various values of Simulates analytical solution variation for the angular velocities Shows phase plane diagrams of Figure 2 for the angular velocities Plots the analytical solution variations for Euler’s angles 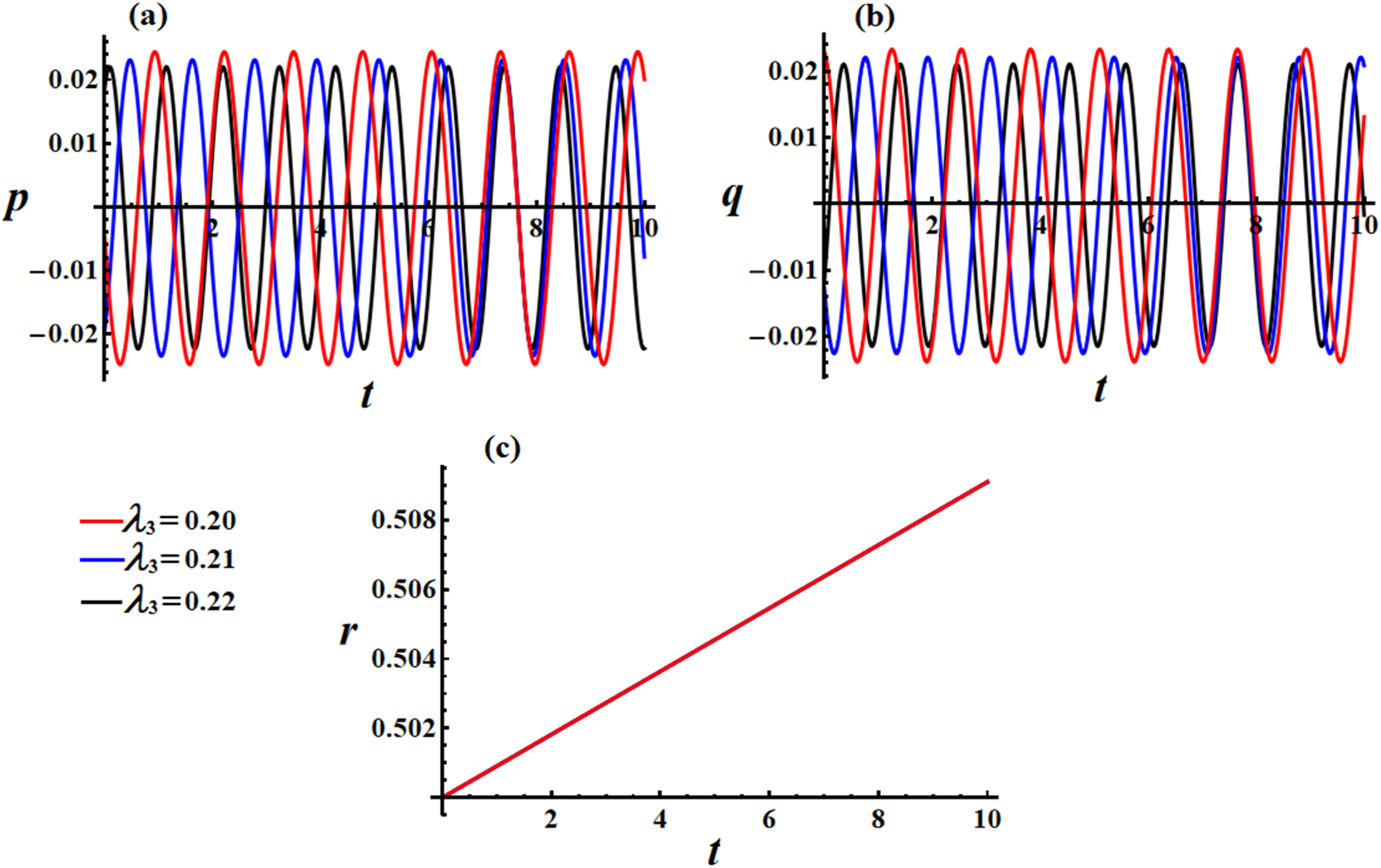
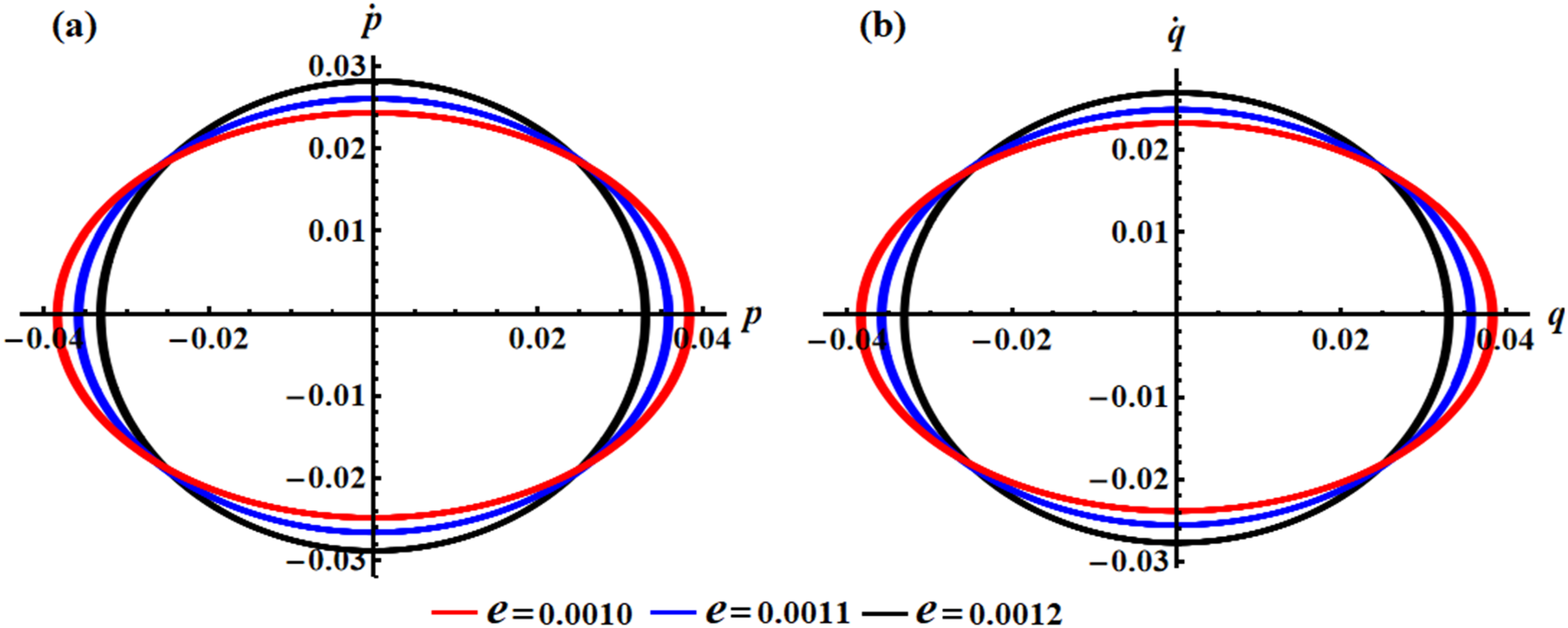
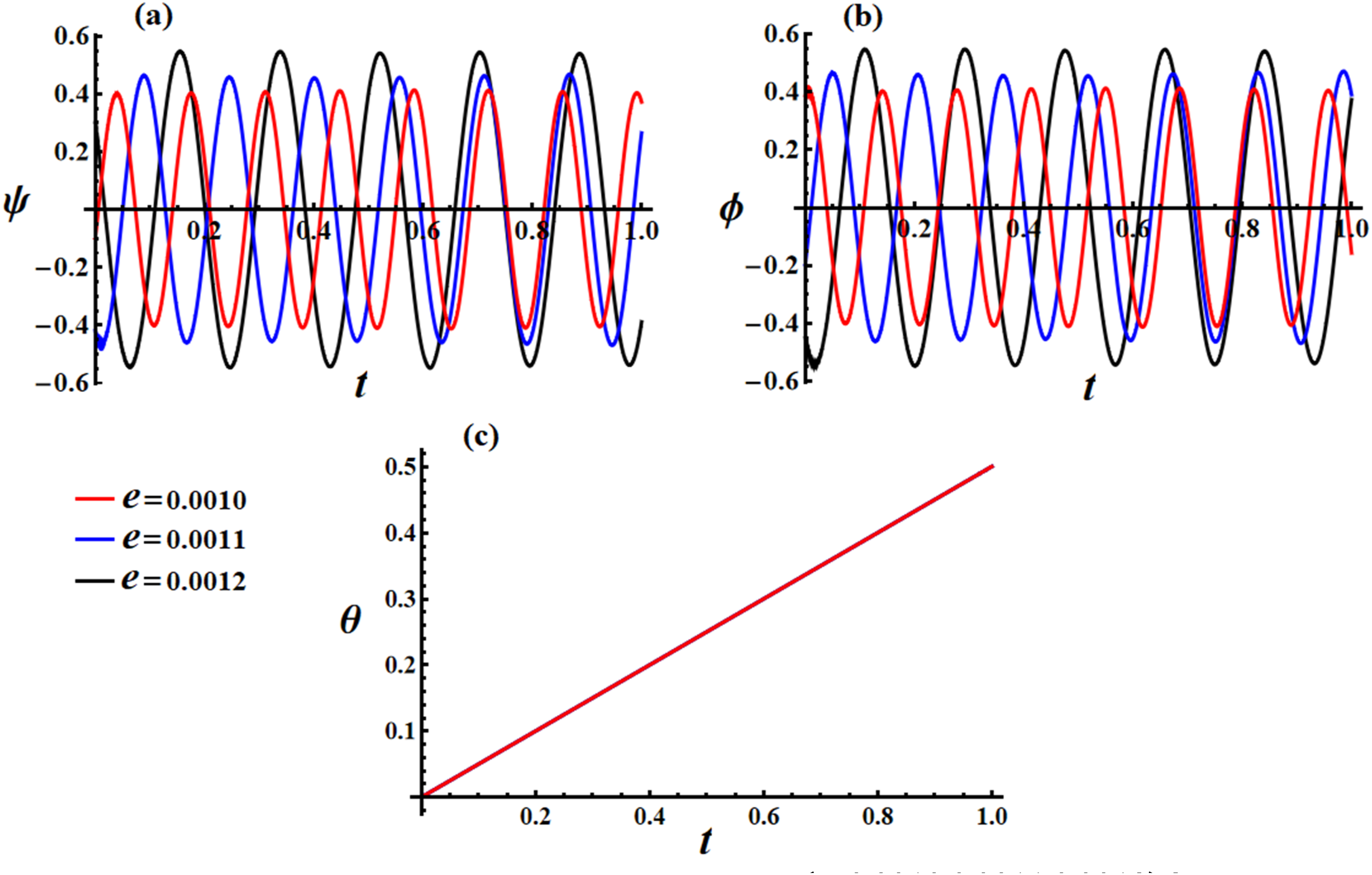
The influence of the EFF
To see the influence of the EFF on the motion, a representation with various values of Diagrams the angular velocities’ analytical solution at Plots phase plane diagrams at the same values as Figure 5 for: (a) Shows Euler’s angles analytical solution at 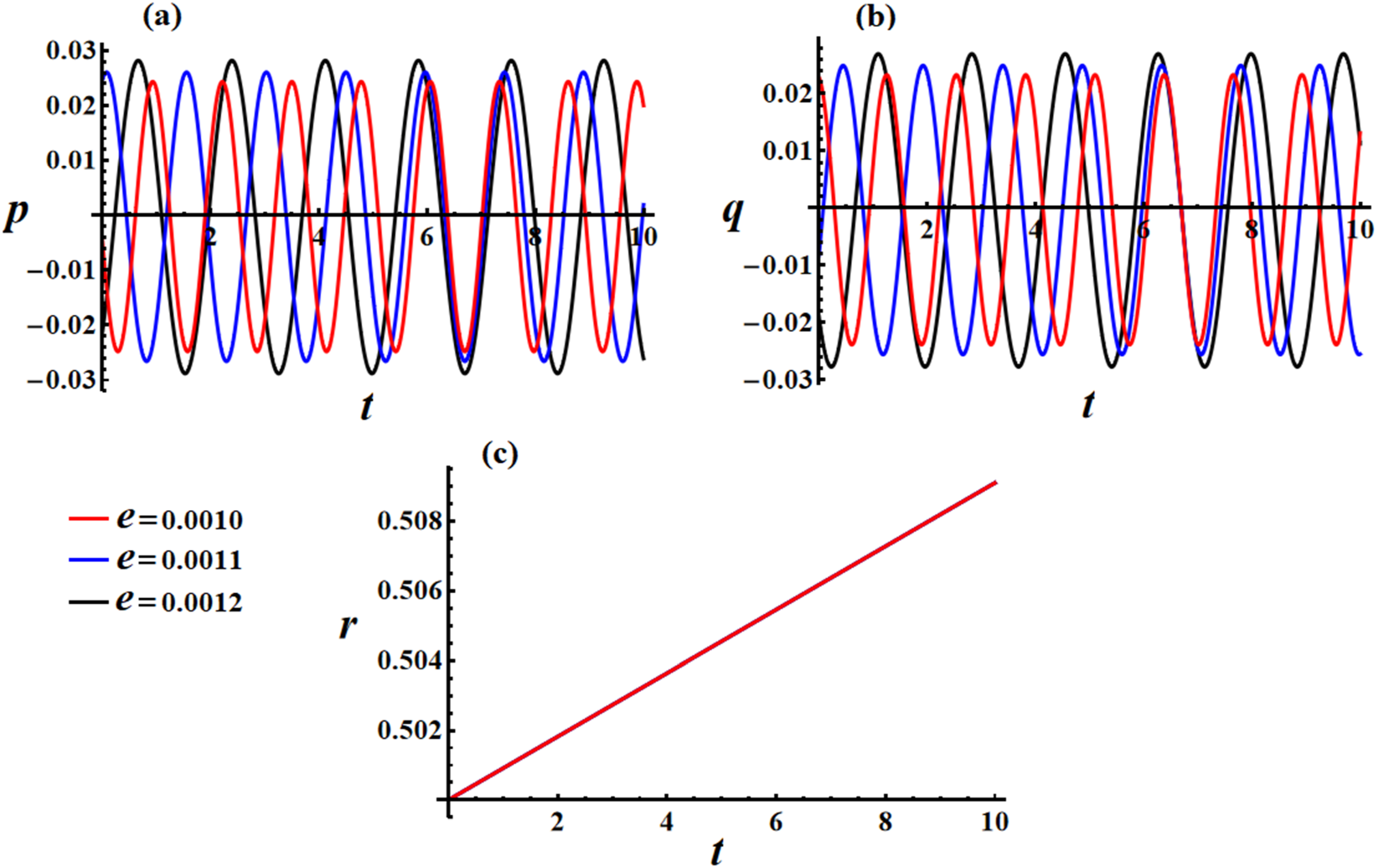
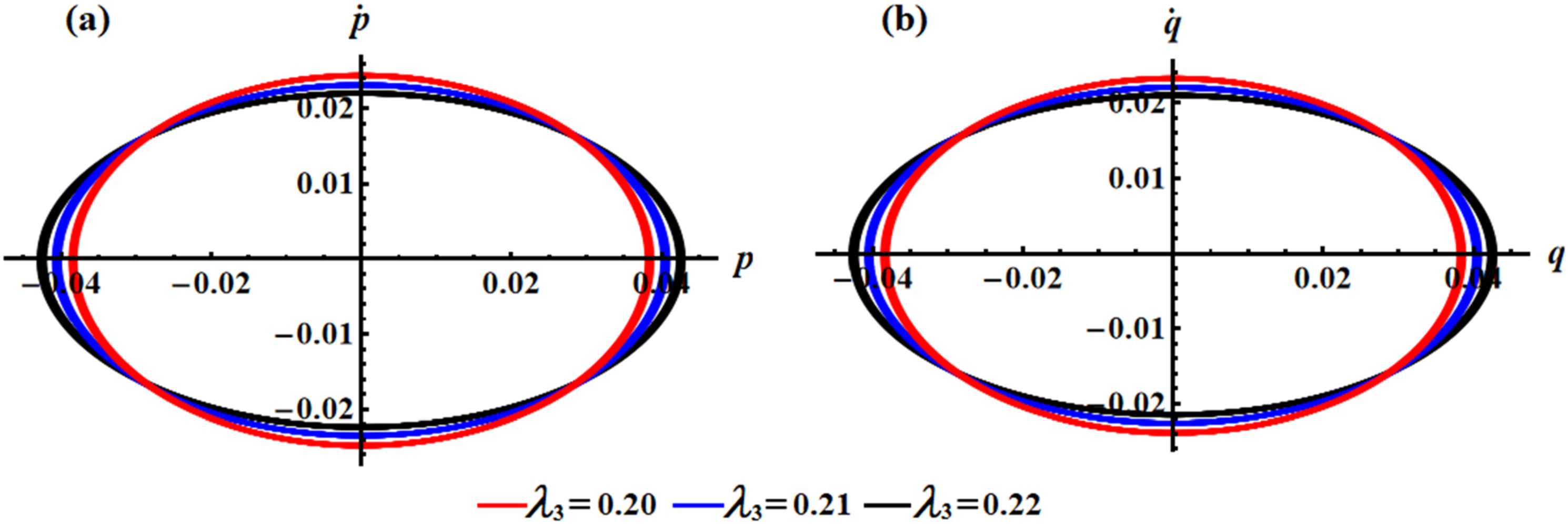
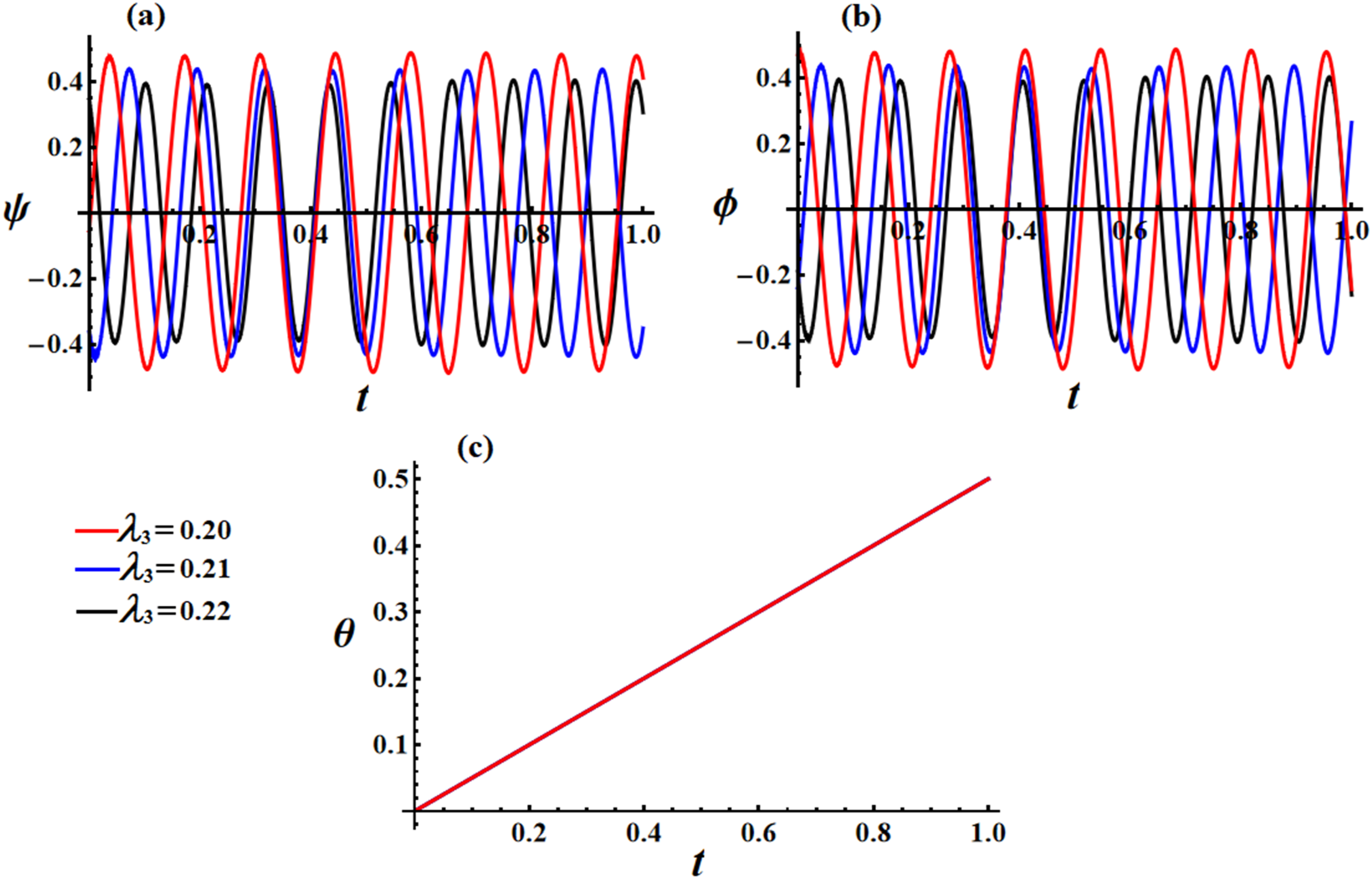
The influence of the axial torque
The last studied impact on the body motion is the influence of the axial torque, a graphical simulation at various values of the axial torque Diagrams the variation of the angular velocity components at Illustrates phase plane diagrams for angular velocity components Plots the variation of Euler’s angles at 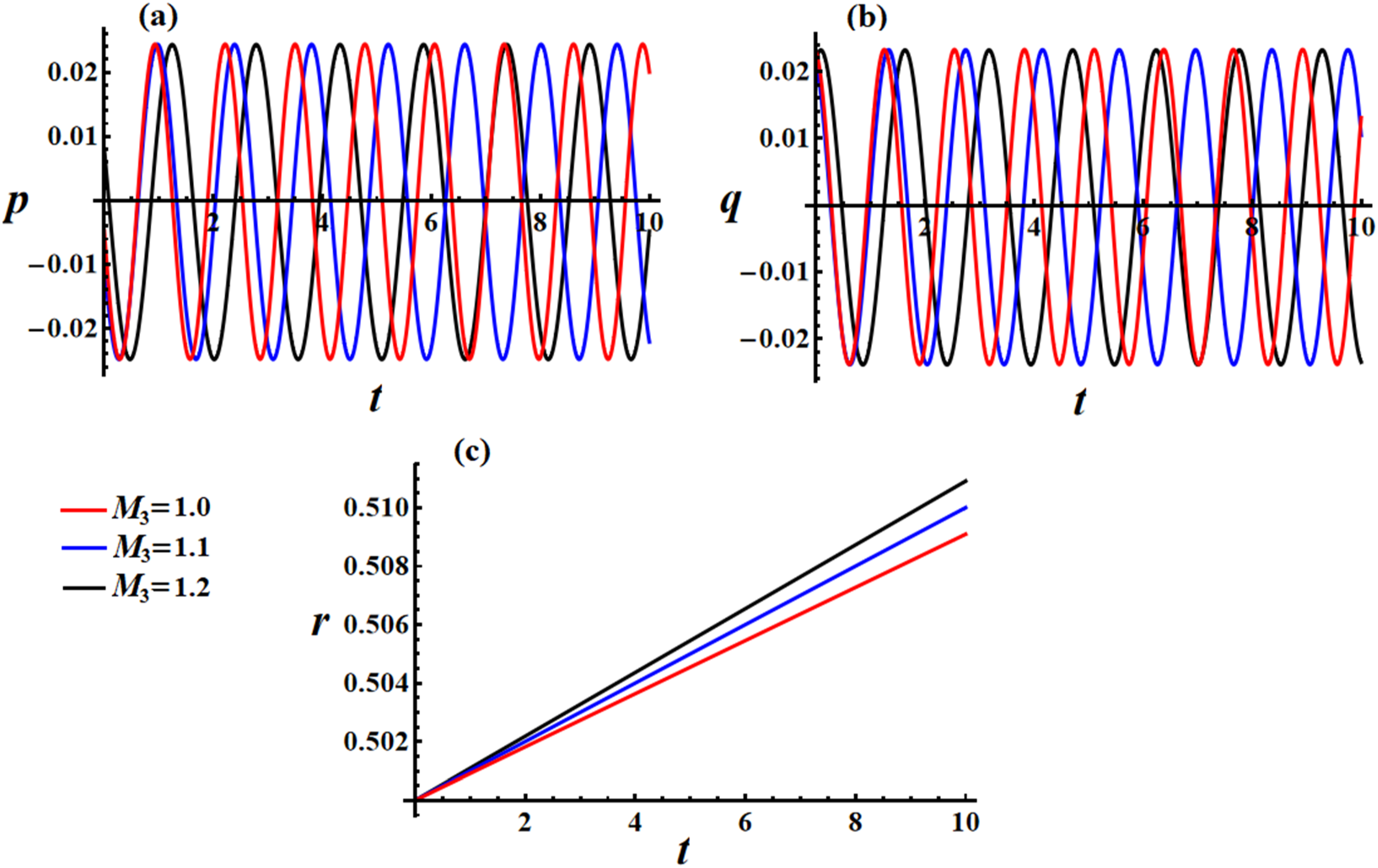
Conclusion
This paper investigates a novel analytical solution for the motion of a nearly symmetrical RB under the effect of EFF, GM, TVBFTs, and CAT. Euler’s EOM in addition to Euler’s angles has been derived in an appreciated form to describe the body motion and orientation. The new analytical solutions for both the body angular velocities and Euler’s angles have been approached. These novel solutions are obtained concerning TVBFTs along
Footnotes
Author contributions
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.