
Abstract
This work focuses on the dynamical rotatory motion of an asymmetric rigid body (RB) subjected to a constant body-fixed torque and a vector of a gyrostatic moment (GM). The motion is considered in the absence of the first two components of the GM. The novelty of the current work is the conversion of the stability analysis of this body from a two dimensional phase plane to three ones phase space. Specifically, two scenarios of stationary torques are considered, the first one is directed on the minor or major axis, while the latter is presumed to act on the middle axis. Therefore, three dimensional phase space routes are generated. In both scenarios some novel analytical and simulation outcomes are provided regarding equilibrium manifolds, periodic solutions or non-periodic ones, separator surfaces, as well as the extreme periodic solutions. The significance of this work is due to its great applications, especially those that use the gyro’s theory.
Keywords
Introduction
In the last few decades, many researchers have focused their work on studying the RB’s motion when the applied external torques have various types.1–10 The main factor of this progress is due to its broad range of uses in diverse fields, including satellites, spacecraft, and the like. An investigation of an asymmetrical satellite’s motion under the action of pressure forces and resistive moments is presented in Ref. 2 and Ref. 3 when the motion is regarded to be with the satellite’s center of mass. After averaging the controlling system, the authors examined the results according to the Euler-Poisson motion. More contributions to this problem are discussed in Ref. 4 when the satellite is subjected to both drag and gravitational force. The authors considered that the drag torque is linearly related to the satellite’s angular velocity. The issue of estimating the solution of the average time of a slightly perturbed dynamical system that is a stationary domain of phase variables is examined in. Ref. 5.
The averaging approach 11 is utilized in Refs. 6–8 to obtain a corresponding averaging system of the controlling one for the rotatory motion of a symmetric rigid body (RB). The motion is acted upon by a Newtonian field of force (NFF), a gyrostatic moment (GM), and a perturbing one. In addition to these forces and moments, the action of an electromagnetic field is considered in Ref. 7 and. Ref. 8. The achieved averaging system is solved according to several applications, in which the gained outcomes have been graphed to show the significant effect of various values of the used parameters on the body’s motion. The gained results generalized the works in Ref. 9 and Ref. 10 when the gravitational field’s influence and perturbing torques are taken into consideration.
A general rotatory motion of a charged RB has been discussed in Ref. 12 under the action of the GM when the body initially has high speed around one of its principal axes. The method of Krylov–Bogoliubov–Mitropolski and its adjustment have been used to obtain the solutions of the governing system of motion. This motion was studied in Ref. 13 to obtain the periodic solutions according to the conditions of Bobylev–Steklov when the body is acted upon by the GM and NFF. The stability of the obtained results has been checked in light of the phase portraits of these results. The influence of other moments like perturbing and restoring, besides the aforementioned moment and force, has been investigated in. Ref. 14 Some of the applications have been looked over and analyzed.
The homotopy method (HM), which is employed in Ref. 15 and Ref. 16 to treat with the vibrating movements of dynamical systems, is regarded as a significant perturbation method that may be utilized to the solutions of numerous differential equations. 17 These solutions are contrasted with the numerical ones to show the precise accuracy of this method. These solutions have been compared with the numerical ones to show the precise accuracy of this method. The motion of a connected pendulum with a controlled wheel was studied in Ref. 18 while in Ref. 19 the authors examined the solution and stability of a planar rotating pendulum model, while the linearized stability of a hybrid oscillator of Rayleigh-Van der Pol-Duffing was achieved near the equilibrium points in. Ref. 20. The modified HPM is used in Ref. 21 to obtain the solution of string axial vibrations to overcome the shortcoming of the HPM, in which the stability criterion is carried out and the frequency equation is determined. Li-He’s method is used in Ref. 22 to gain the formulation of frequency amplitude for a microelectromechanical system.
The rotatory motion of a RB for the displacement case of the body’s center of mass was examined in Ref. 23 when the body’s motion is considered to be acted by a gravitational field only. The method of small parameter 11 was used to gain approximate solutions. The extension of this work may be found in Ref. 24 and Ref. 25 when the body suffers from the full existence of GM and the presence of NFF besides the two components of GM, respectively. Moreover, the approximate solutions of an irrational frequency case for the RB motion are acquired in Ref. 26. The numerical outcomes are gained using Runge–Kutta algorithms of fourth order, and they are compared with approximate analytical ones to show the agreement between them. The stability of the acquired data is explored using several phase plane plots, which demonstrate the motion’s lack of chaos. The angles of Euler have been used to assess the geometric description of motion to pinpoint the body’s orientation at every given moment.
Exact solutions and perturbed ones for a large range of special instances have been produced through several scientific works. In Ref. 27, the authors proposed a perturbation approach for an asymmetric RB in arbitrary torqued motion. An Encke-type perturbation approach was used to formulate the problem with regard to the analytic approximate solution in the absence of torque. Computer processing durations for these and two additional motion prediction algorithms were compared in. Ref. 28. In Ref. 29, the authors provided a precise solution for a dual-spin spacecraft to move without experiencing torque. With a constant spin rate and traversing torques, a closed-form solution to the linearized equations of rotation was investigated in Ref. 30. In Refs. 31–34, the authors established the approximations for the motion of a near-symmetric RB exposed to body-fixed torques (BFT) that are both stationary and varying with time around the three main axes. Euler’s equations have been decoupled to obtain the solution of the RB motion through several decoupling processes in Ref. 35. This body is subject to a GM in addition to another external time-dependent harmonic moment about the body’s main axes, in which a few applications are presented theoretically.
This paper’s major outcomes can be interpreted in the manner shown below. A collection of one dimension (D) separated curves were displayed on a 2D phase plane in Ref. 1 to study the stability of an asymmetric RB subjected to a constant body-fixed torque along one of its main axes. The phase plane’s coordinates are somewhat physically illogical, and the analysis is only performed for a single set of a time’s initial conditions. The main innovation of this study is the conversion of the stability analysis from a 2D phase plane to a 3D phase space, which makes the current work novel. The dimensionless angular velocity of the coordinate system of the body is represented by the 3D phase space coordinates. The generated coordinate system is the same as the one that was applied to the stability analysis of a spinning body without torque. Consequently, it lends itself more easily to practical interpretation. The separators are graphed as 2D surfaces in the 3D phase space, allowing for the capture of all potential initial conditions with just a single graph. The conversion of this body’s stability analysis will be from a 2D to a 3D phase space.
In this study, the next contributions are organized:
Problem formulation
This section aims to provide further information regarding the description of the problem under consideration. Therefore, we consider the rotatory motion of a RB around a fixed point The dynamical motion.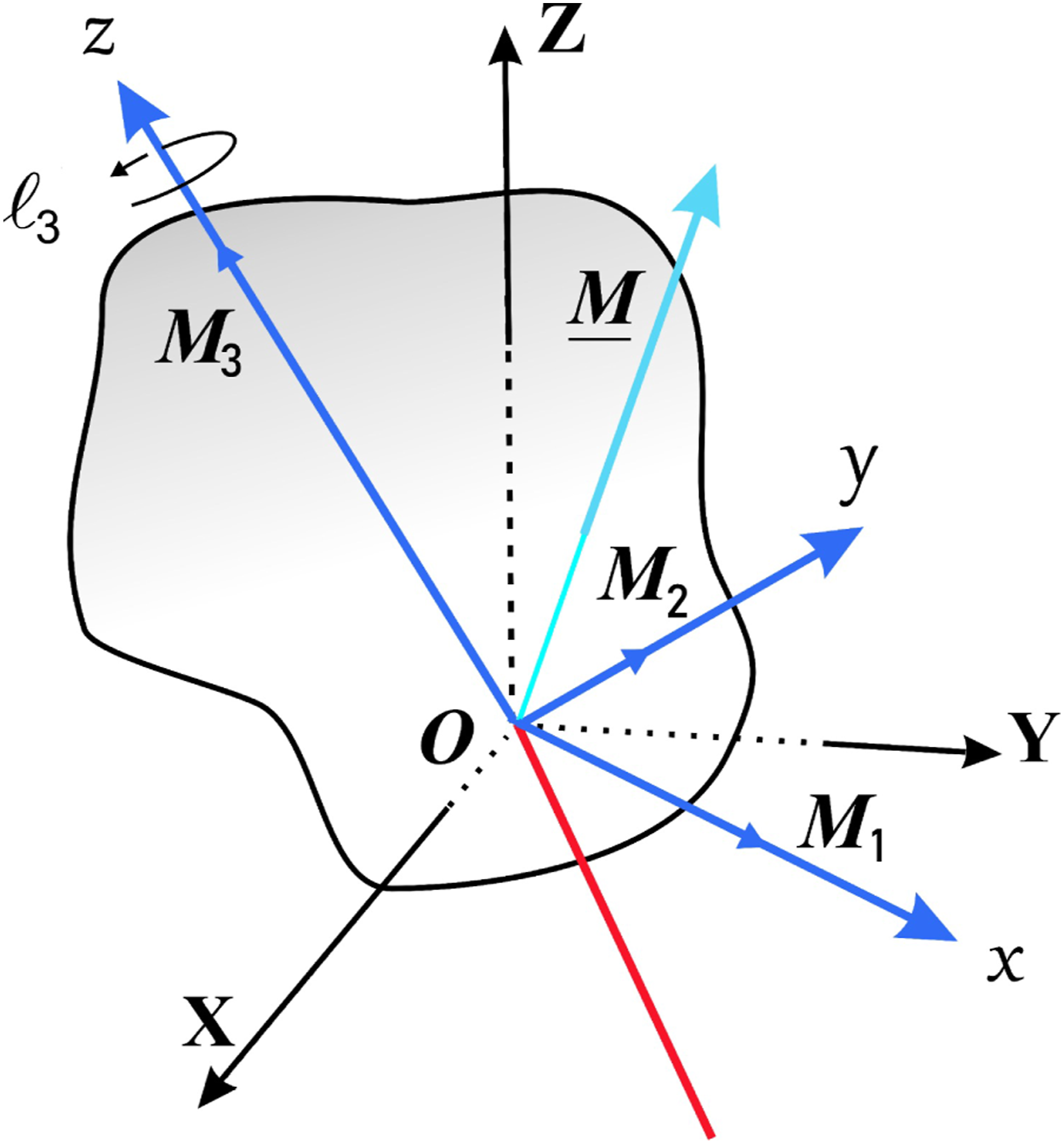



Let us consider the following parameters


Equation (1) can be rewritten without reference to the rotating body’s inertia characteristics as follows

Further, removing the dependency of the previous equations (3) on the magnitude of the projections
Considering


Substituting (5) into the systems of equation (1) yields

Making use of (4) and (5), we get

Using equation (5), the previous equation can be easily verified. As cleared in equation (5), the quantities
The equations of motion (EOM) at steady state become


Specifying the terms of the angular velocity perturbation as follows

Then, maintaining

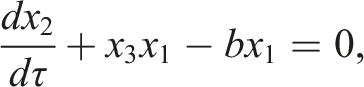
The resulting characteristic equation is derived as follows

Steady torque on the minor/major axis
Major axis
Along the major axis 

It is clear that the previous equations (13) constitute with a hyperbola 

The last two equations of system (15) have the following solutions
Here, 
Based on the
This circle’s radius 
Let
Therefore, we may rewrite equation (18) as follows
At the angle 
Consequently, equation (19) has the form

Observing that for a specific trajectory, the first integral of the motion 
It is noted that the point Depicts finite and infinite tracks for a constant major torque axis at distinct values of 

Making use of (24) and (25), to obtain
Remembering that Describes RLS with finite and infinite tracks for a constant major torque axis at distinct values of 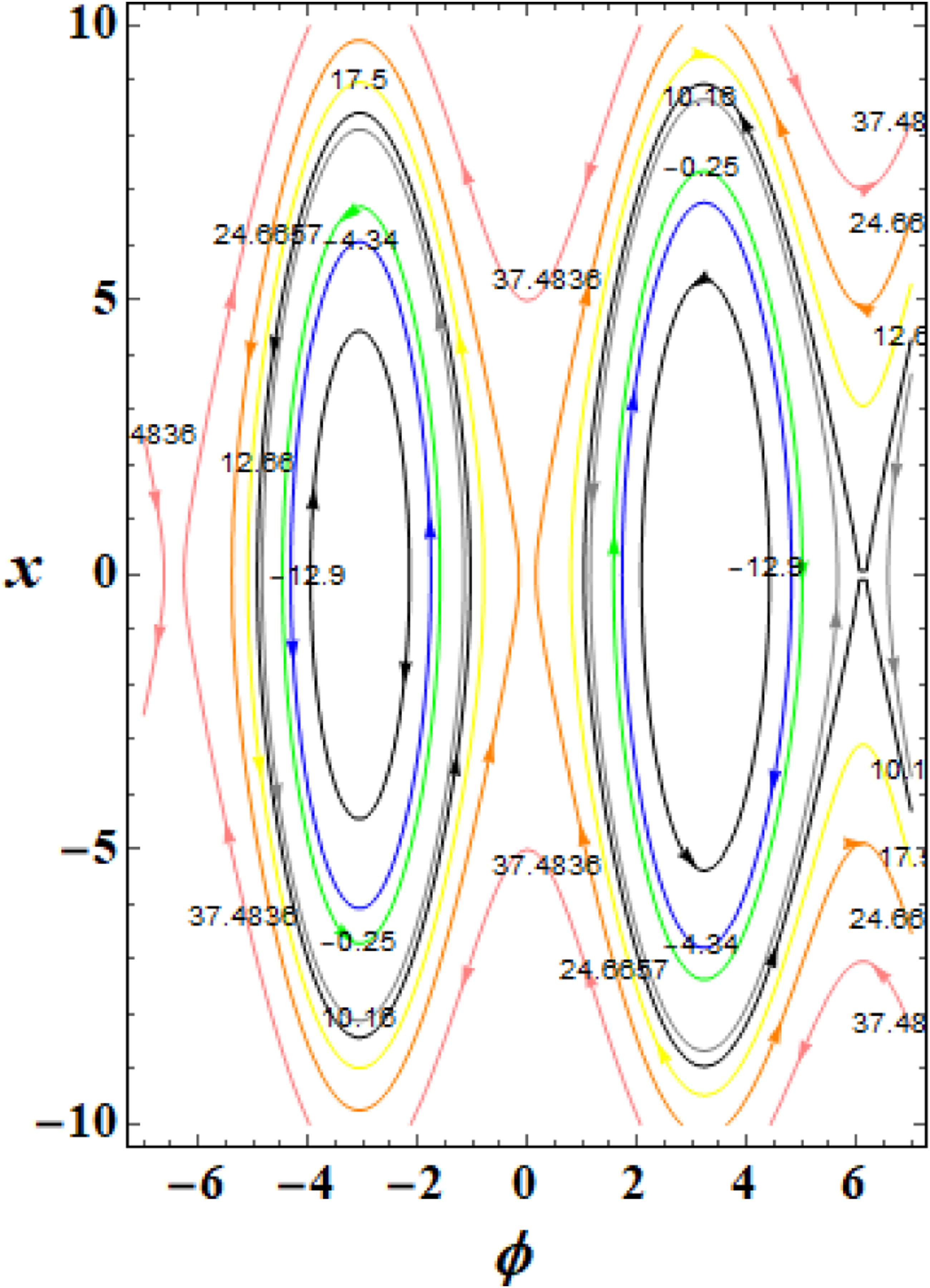
Considering 
which depicts an energy constant trajectory in 3D. Taking into account that 
which is an illustration of the left separator (LS) in 3D. By adjusting the right side of equation (28) from
The 3D surfaces of the RLS in the Shows the surfaces of RLS for a constant major torque axis.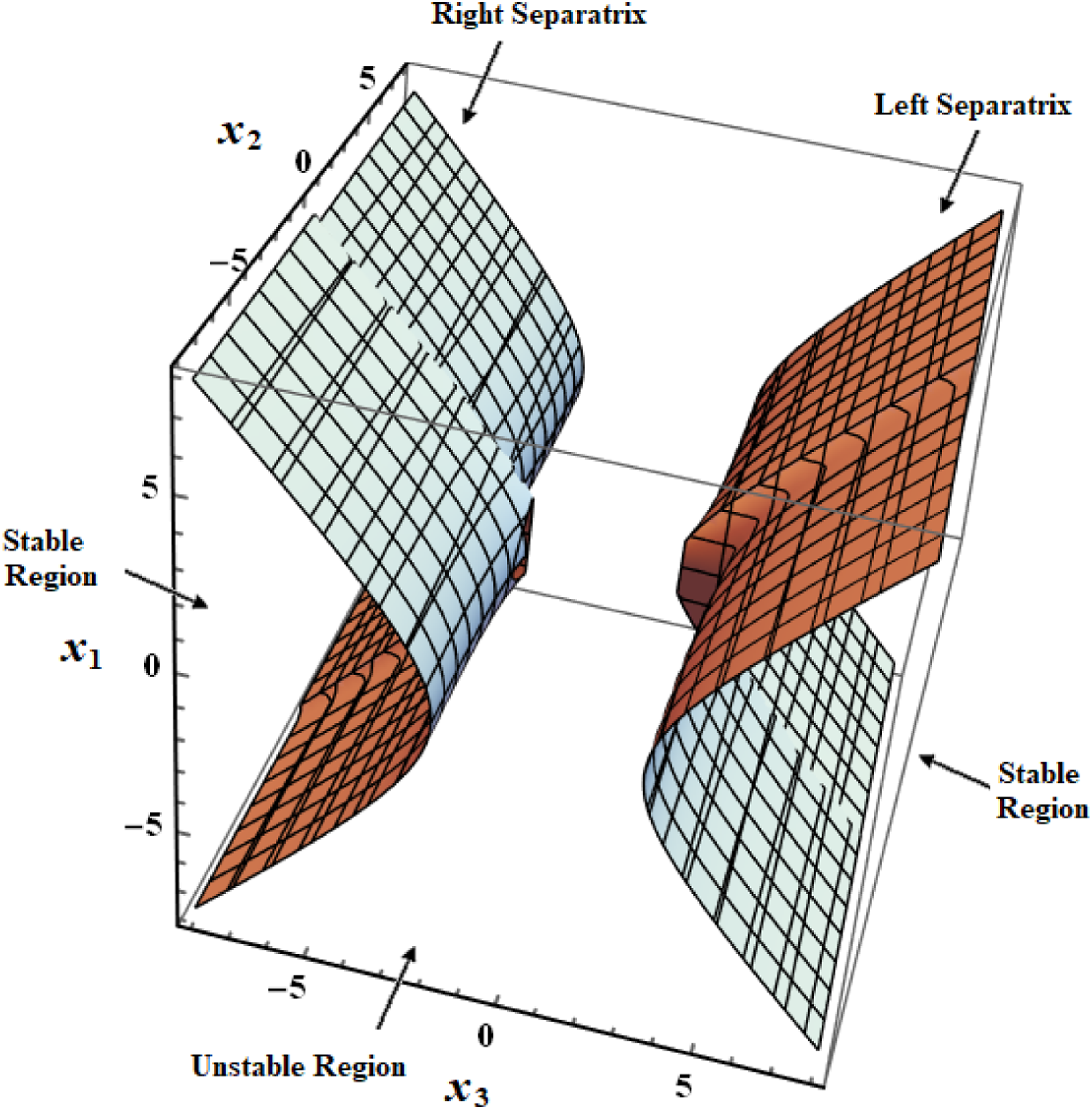
For initial circumstances inside the unstable zone, the tip’s projection of the dimensionless vector
A contour map of the upper portion Represents the RLS surfaces contour plots of 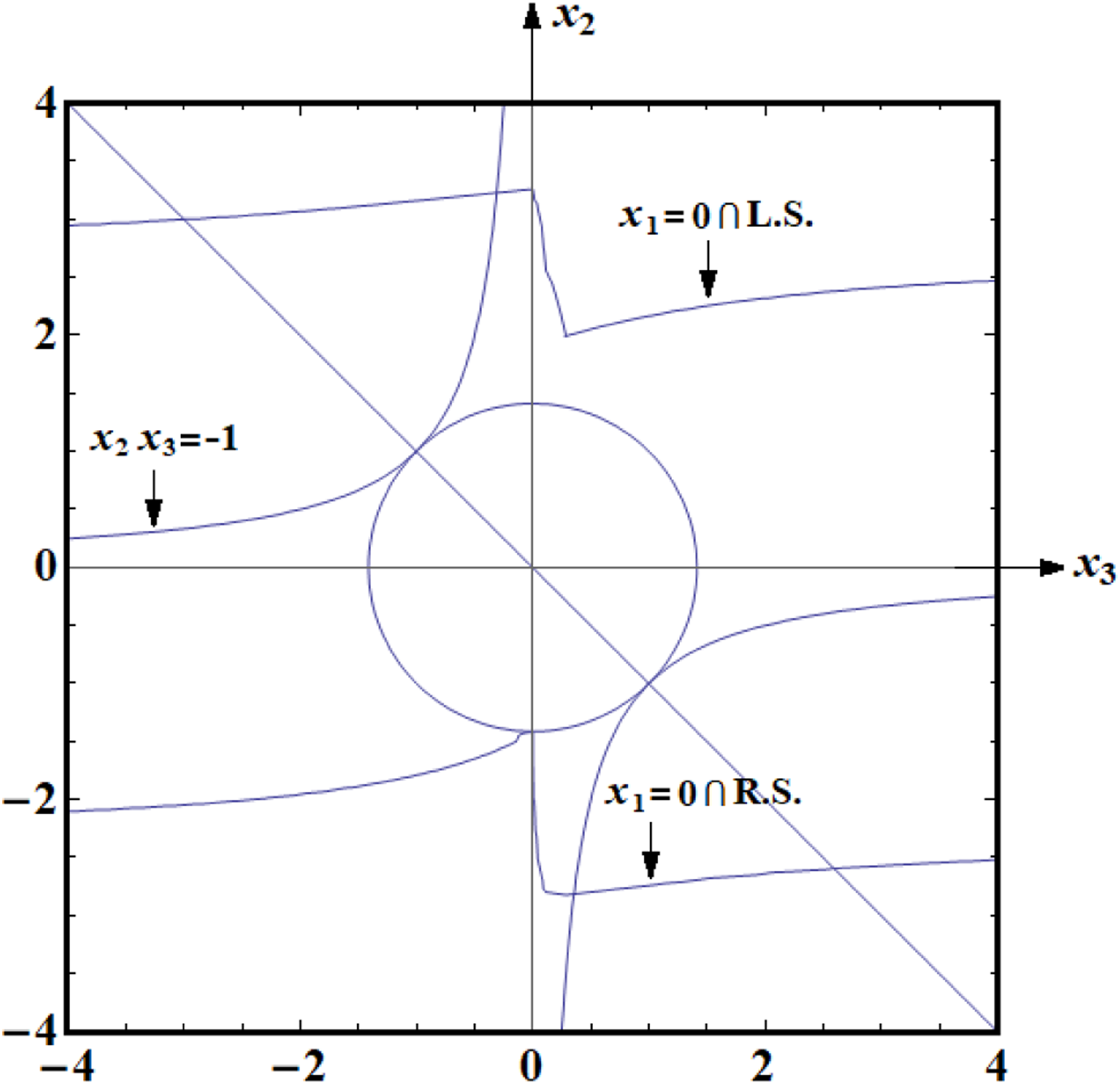
It is possible to determine that the intersection of the two separators surfaces and the plane 
It must be mentioned that 
Since
Remember that each separator phase plane map, including Figure 3, was created for a specific value of
At
Minor axis
Due to the specific form of equations (6), the solution for the scenario in which there is an operating stationary torque along the minor axis may not be derived by swapping the indexes 3 and 1 in the previous derivation.
A stationary torque on the middle axis
For the scenario of a stationary positive torque that is directed on the middle axis, one can write 


As a result, Lyapunov stability exists at the points of equilibrium for the linearized system that is associated with the previous nonlinear system (31). Inserting an additional parameter 
According to this definition, one can write equations (31) as follows

The first and third equations in (34) have the following solutions

These solutions satisfy the following form
The substitution of the solutions (35) into the second equation in (31) yields

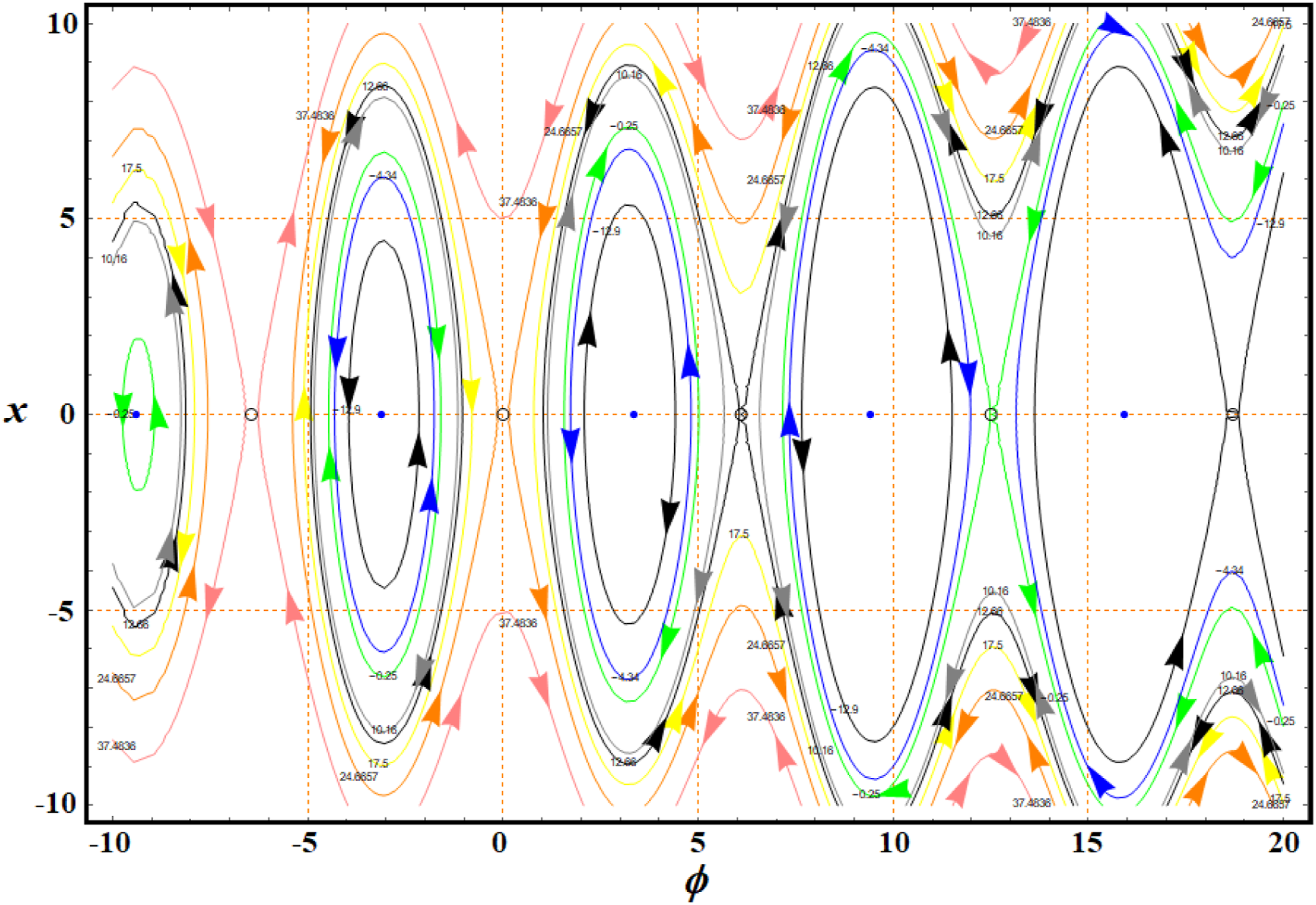
Paths of
In the present scenario, 

Let us consider the following notations
To rewrite equation (38) as follows
The point equilibrium for the defined conservative system by equation (40) has the form
Since 
which demonstrates
which is the same as in equation (32). Based on the right side of equation (40), which represents a conservative field of force, the system has a constant energy that can be determined. For this purpose, equation (40) can be rewritten as follows
Making use of equations (40) and (44) to obtain
Based on the above two equations, one can get
Separating the variables in (46) and integrating the result to yield

Therefore, one can directly obtain
According to the right-hand side of equation (49), the constraints on the principal values of inertia, and the expressions of
It is clear that the point of equilibrium 
This equation describes a closed path with the constant
Stable and unstable separator
Stable separator
The scenario 

Then 
At equilibrium, there is

Combining this equation with equation (37) produces
According to an analysis of equation (51) any motion initiated from the surface 

Using equations (55) and (56) to obtain
As a result, separating the variables and integrating the result to obtain
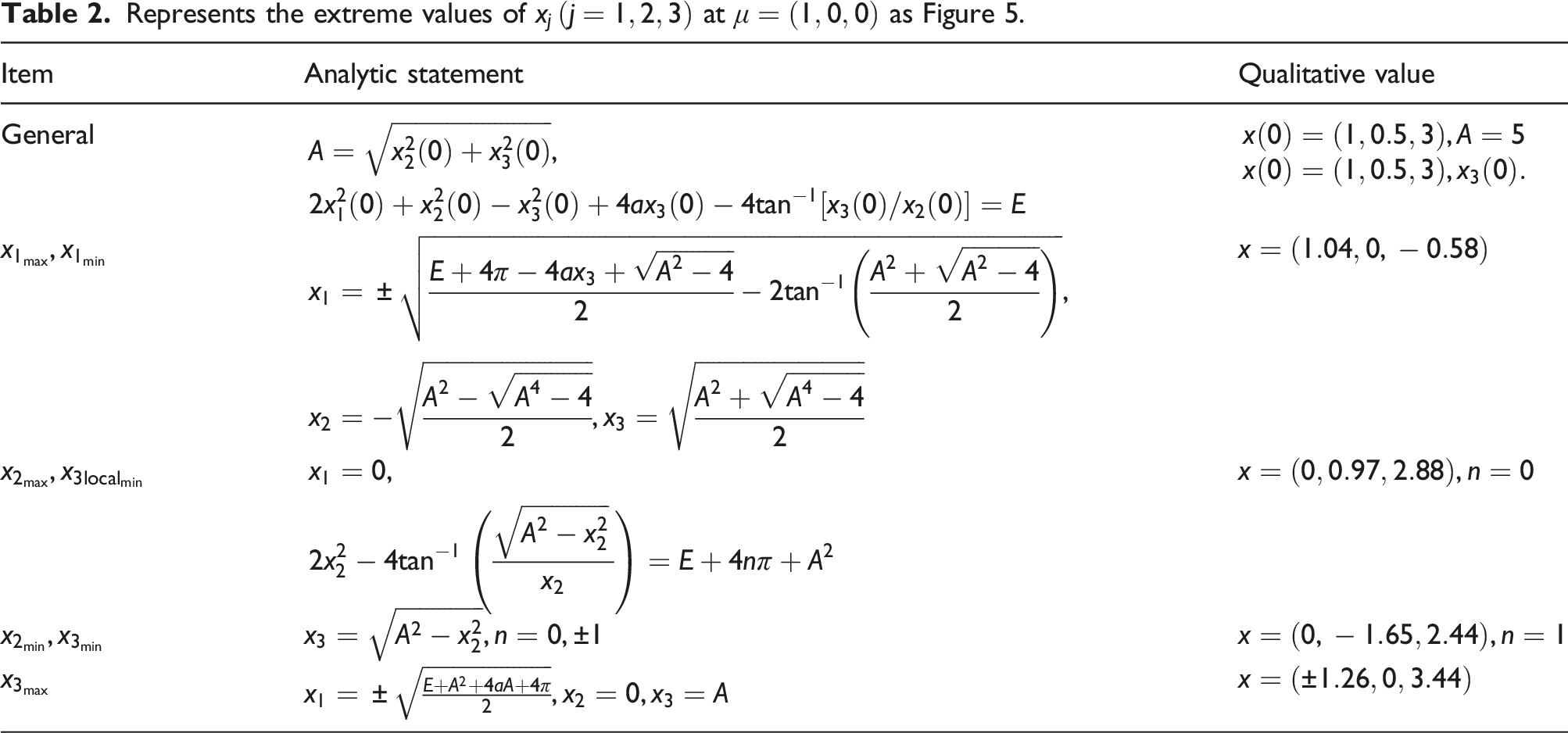
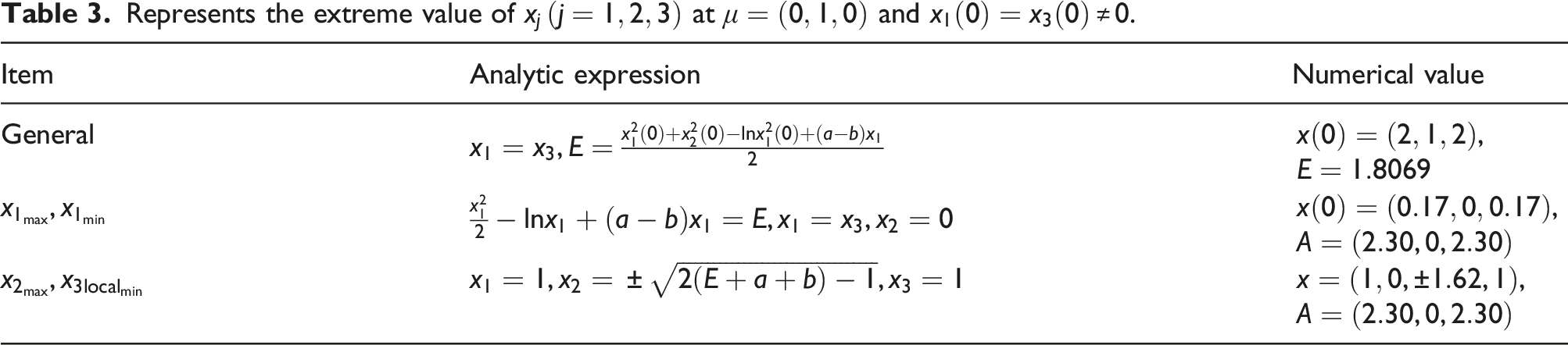
Represents the extreme value of
Unstable separator
At 

Hence 
It is obvious that there are no equilibrium points in this situation. A closer look at equation (60) demonstrates that
The substitution of equation (61) into equation (59) yields
In the case where
Torque around major/minor via middle axes
The significant changes in sign between the equations (15) for minor/major axis torques and those for the middle axis equations (34) are due to the features of the paths related to major/minor axis torqueing via the middle axis.
Since their related formulations of equations (15) and (34), respectively, have different signs, major or minor axis torqueing and middle axis torques have different path properties. The distinct linear homogeneous part of the equations of motion is caused by these sign changes, and this leads to the harmonic solution of the equations (16) for the major or minor axis torqueing in comparison to the hyperbolic solution of the equations (35) for the middle axis torqueing. The circle’s radius (or part of a circle) on which the
As was previously mentioned, the left and right separators shown in Figures 4 and 5 are the result of the minor or major axis torqueing. The two curved separator surfaces, which do not intersect, divide the
Conclusions
Under the impact of a GM vector and a steady body-fixed torque, the problem of the rotatory dynamical motion of a generic RB has been examined. The current work’s main contribution is the transition of the stability analysis of this body from a 2D phase plane to a 3D phase space. For the situation of a time-varying body stationary torque, Euler’s rotational EOM were modified to remove their dependency on inertia constraints. These equations have been rewritten in dimensionless forms for the situation of stationary body-fixed torque to get rid of their dependency on both the inertia parameters and the torque’s magnitude. The fundamental aspects like separators, equilibrium, and the integrals of motion that related to the system’s paths were converted from their 2D into 3D phase space. To demonstrate these aspects and learn more about how they interact in this fundamental yet extremely nonlinear situation, the dimensionless equations and the brand-new 3D phase space visualizations were used. Additionally, the extremes of the dimensionless periodic solution are also thoroughly analyzed.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.