
Abstract
This is a new study that examines how a rigid body (RGB) reacts to the influence of constant body-fixed torques and gyrostatic torques (GT), as well as the impact of energy dissipation. The RGB’s model being studied includes a spherical slug near the center of mass covered by a viscid layer. Understanding the behavior of this model can offer insights into how RGBs respond to external torques, aiding in the development of more efficient and stable systems for aerospace and robotics applications. The research delves into the relationship between energy dissipation and the GT on the RGB’s motion in three different scenarios involving constant torques around various axes. Detailed analysis, as well as novel simulated results, is presented for different energy dissipation possibilities, such as equilibrium manifolds, periodic or non-periodic solutions, and separatrix surfaces. These new findings are crucial for comprehending, maintaining, and controlling the motion of rigid celestial bodies influenced by external forces in space. The study promises to have a significant impact on the aerospace industry, particularly in the design and operation of spaceships, spacecraft, and satellites, by enhancing our knowledge of rotational motion and celestial bodies’ behavior. A comprehensive report will be produced to elucidate the complexities of rotational and orbital motion discovered during this research.
Introduction
Studying the dynamics of the RGB subject to external torques, energy dissipation, and GT plays a significant role in calculating the trajectory of its rotational motion. The behavior of such systems is critical in fields such as aerospace and robotics, where efficient and stable system designs are of utmost importance. Therefore, to comprehend the rotational motion of these bodies, it is imperative to investigate the impact of energy dissipation and GT on their dynamics when dealing with a semi-RGB that experiences internal energy dissipation, in which it is important to understand that the kinetic energy will consistently decrease over time. As a result, the energy ellipsoid will eventually shrink, creating an open polychromatic route that spirals away from the RGB’s minor axis. The RGB will eventually reorient and rotate about its major axis with a positive or negative spin rate as this path crosses the separatrix and gets closer to the major axis. Due to their inherently unstable nature, RGBs that spin about their minor axis while energy dissipation is present need to be carefully monitored and adjusted in order to preserve stability and avert any potential mishaps or malfunctions. Therefore, the RGB must frequently be designed in this way for practical reasons.
Prior studies on this subject have been examined in Refs. 1–5, in which in Ref. 1, the authors examine the RGB model, which has a spherical fuel slug that is encircled by a layer of viscous fluid while exploring energy dissipation. They have designed a control system that depended on gyros to determine when thrusters should be ignited in order to attain a final orientation after a spin transition, which ensured that the intended orientation was attained. Attitude acquisition schemes for stabilizing spacecraft using a steady force on a wheel have been developed in Ref. 2. Along with the functional dynamics and parametric relationships that are given using phase planes and elliptic integral solutions, the implementation of the momentum sphere and energy ellipsoid has been presented. The configuration of the moment of inertia and the capacity to predict the tolerances for the wheel speed, satellite spin rate, and moment of inertia in advance are two aspects that determine if the implementation is feasible. In Ref. 3, the authors present a productive method for determining whether the stability of a linear dynamical system is asymptotic for all variables or not, in which it is subjected to potential, gyroscopic, and dissipative forces. Since the traditional Kelvin–Chetaev’s theorems aren’t applicable in this scenario, they recommend using an alternative method based on Barbashin–Krasovskii’s theorem, in which the system is broken down into smaller components, which is particularly useful for systems with higher dimensions or uncertain parameters. In Ref. 4, the GT’s influence on the motion of an asymmetric RGB in the presence of constant body-fixed torques is examined. Moreover, a complete description of the stability manner and the equilibrium point (EP) during the motion is provided. In Ref. 5, an investigation is conducted on the 3D phase-space trajectories for three distinct scenarios related to the primary axis, the intermediate axis, and the minor axis, in which the obtained results are considered new. In Refs. 6–8, the studies examine the movement of RGB with a cavity filled with high-viscosity fluid, which is almost dynamically spherical, around its center of mass. This motion is subjected to constant torques applied to the body itself. The technique developed by Chernousko 9 is used to determine the torque generated by the viscous fluid on the RGB within the cavity. Numerical results of the equations of motion (EOMs) are obtained using the 4th-order Runge–Kutta method. A similar case for a symmetric charged RGB is presented in 10. An asymptotic technique of averaging is employed to solve this problem’s EOMs. It finds that the theoretical description of the effects of various values of body parameters holds significant value as it can be applied to optimize the charged RGB. Furthermore, an original contribution is made by filling the gap in understanding the dynamical properties of a rotating RGB with a viscous fluid. The influence of external forces and torques is examined in Ref. 11, in which the uniform approximate solutions are achieved and plotted to explore the effect of the RGB’s parameters on the motion. In Ref. 12, a comprehensive and sophisticated technique for analyzing the dynamics of the angular motions of RGBs when subjected to a variety of perturbation moments of diverse physical origins is provided. Its contents include the fundamental principles of both RGB dynamics and the averaging method (AM). 13 The rigorous approach utilizing the AM can be applied to objects possessing arbitrary ellipsoids of inertia. Several types of perturbation moments are investigated, such as those caused by external factors like gravity and aerodynamics,14–17 as well as internal factors such as fluid viscosity in tanks and the elastic and semi-elastic characteristics of the RGB. 18 In these works, AM is used to obtain the approximate solutions of symmetric RGBs when acted upon by perturbation moment besides GT, 8 and when the RGB is subjected to Newtonian force field (NFF) and GT. 15 In Refs. 16 and 17, the authors have looked at charged RGBs influenced by NFF and GT, respectively. These studies generalized the results that had previously been found in Ref 18 through Ref. 22. On the other hand, works19–22 study the problem of RGBs with cavities filled with a liquid as they gave a novel approach to the problem which provided a significant result. In Ref. 23, the authors examine the analytical solutions of the EOMs for the RGB around a fixed point by decoupling Euler’s dynamic equations. The body’s movement is considered under the existence of the GT around its rotating axes in addition to another moment, which is represented by external loading and described as a time-dependent harmonic function along the same axes. The analytical outcomes are obtained while considering the physical properties of the RGB and proving the uniqueness of these outcomes. In Ref. 24, it is explored how a virtually dynamically spherical satellite with a hole filled with viscous fluid moves across a resistive material. The required solutions are obtained analytically and numerically over whole-time intervals. In Ref. 25, the rapid rotatory satellite’s motion with dynamic asymmetry is studied. Another investigation into the rotary movement of the RGB, which contains a hollow close to a spherical shape, is investigated in Ref. 26. The analytical solutions are obtained and presented graphically to show the positive impact of the RGB’s physical parameters on its motion. Diagrams depicting the phases of these solutions are presented to assess their stability. It is worth noting that the small parameter technique (SPT) has been widely used in Refs. 23–31 to find the analytical solutions for the RGB problem as one of the approximate approaches. The periodic solutions obtained are given in Refs. 27–29 whether in a uniform field of gravity 27 or in an NFF28,29 containing singular points. These points pose a major problem because the solutions are not defined at integer values of frequencies or their additive inverses. Accordingly, it is necessary to treat these singularities at all values of these frequencies. Hence, there is an enormous amount of scientific research necessary to bridge this gap, and it is impossible to reach a solution that is free from these singularities. This problem has been treated by adding the effect of the third component of the GT on the RGB, in which a new frequency is obtained, 30 and it is known as Amer’s frequency. This has been verified under the full effect of the GT, whether the motion is in a symmetric or asymmetric field of gravity.30,31 It was found that the obtained solutions contain no singularities at all, and they are validated for all values of this frequency. The generalization of this problem has been found in Ref. 32 under the influence of the GT and NFF, respectively. The SPT is used to solve the governing EOMs to achieve asymptotic solutions for cases of irrational frequencies. Furthermore, the examination of RGBs carrying rotors and their free rotational motion, considering the impact of internal forces, is addressed in Ref. 33. Specifically, the author has aimed to demonstrate the motion of the carrier body is akin to rotation around a fixed axis, provided that the problem parameters and initial conditions are known. In Ref. 34, the authors approach a novel analytical solution for the RGB’s motion under the impact of the GT, time-varying transverse torques, and constant axial torque. In Ref. 35, the novel exact solution for the rotary motion of a nearly symmetric gyrostatic RGB with constant torques is presented. In Refs. 36–38, close to Lagrange’s case, these works have developed an asymptotic solution for the RGB’s problem under the impact of some restoring and perturbation torques. Both the approximated and graphically simulated solutions are obtained by implying the AM on the problem EOMs and solving the system. In Refs. 39–41, considering the energy dissipation effect on the motion of the RGB for a spacecraft model, 40 Melnikov’s method was used to predict the occurrence of chaotic motion of the system. From that, both analytical and numerical solutions are obtained. On the other hand, Ref. 41 presents a system of RGBs in which damping forces act between them with dissipated energy. In Ref. 42, Euler’s equations have been solved for a nearly symmetric model of the RGB. Fresnel’s integrals have been used also to obtain the approximate solution for Euler angles. In Refs. 43–45, for both Euler and Poisson equations, the first four integrals for Euler case have been obtained under the influence of GT on the motion. Also, for both Lagrange and Kovaleski cases, under some circumstances on the body inertia moments, the solution for the problem has been derived.
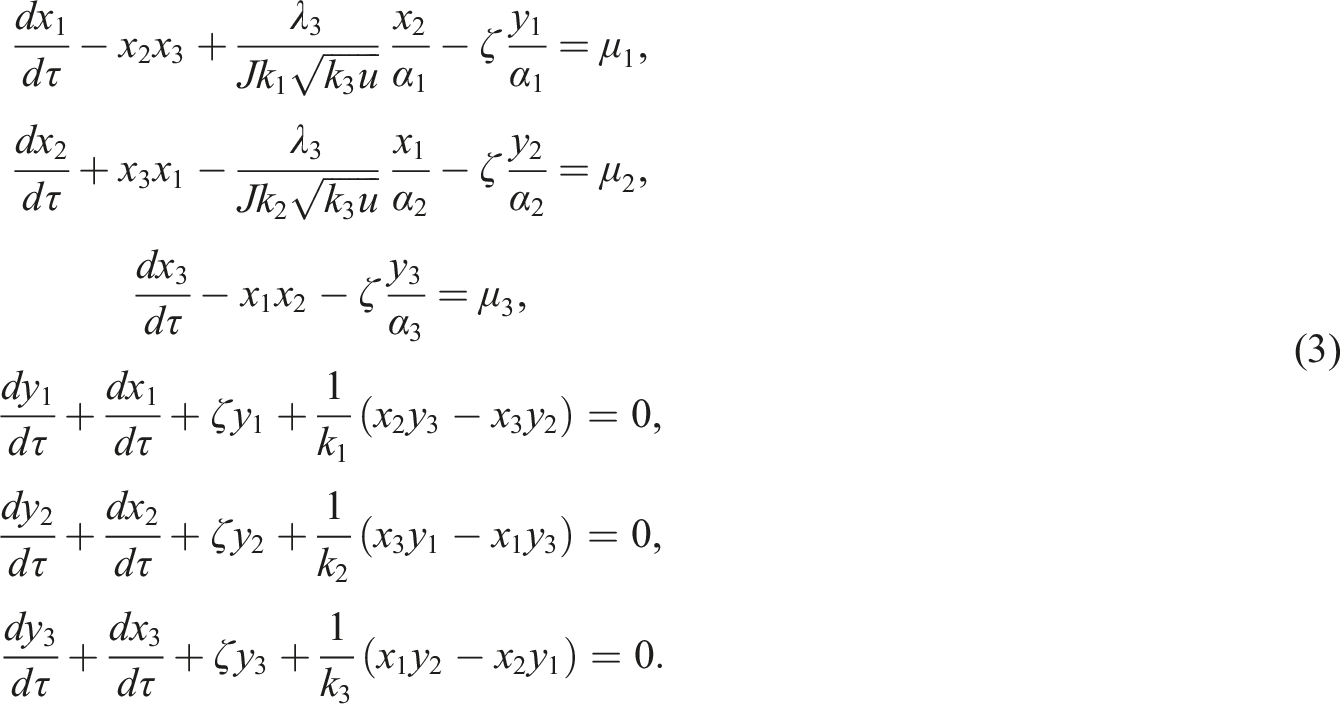
This paper explores the behavior of a semi-RGB during various rotational maneuvers, that is, during a spin-up maneuver, a flat-spin transition maneuver with spin polarity control, or a flat-spin recovery maneuver. The RGB’s motion is studied when the body is subjected to several forces, such as energy dissipation, constant body-fixed torques, and the GT, which serves as a crucial factor that influences the behavior of the body. Analyzing these forces and factors, we aim to gain a better understanding of the dynamics involved in these maneuvers and how they can be optimized for practical applications. A novel set of nondimensional EOMs is derived for the semi-RGB subject to constant body-fixed torques. A full simulation of every possible situation the RGB could experience during the motion is provided. The outcome results have an outstanding influence on designing and analyzing systems for semi-RGBs, such as satellites, spacecraft, and molecules. This research could be considered an inspiration for other researchers to study other perspectives for the GT within this particular case. Applications in industries like engineering and astrophysics would be also affected by the results.
Investigations of the problem
This section will provide an overview of the research problem which is the rotational motion of the RGB subject to constant body-fixed torques The RGB’s physical model.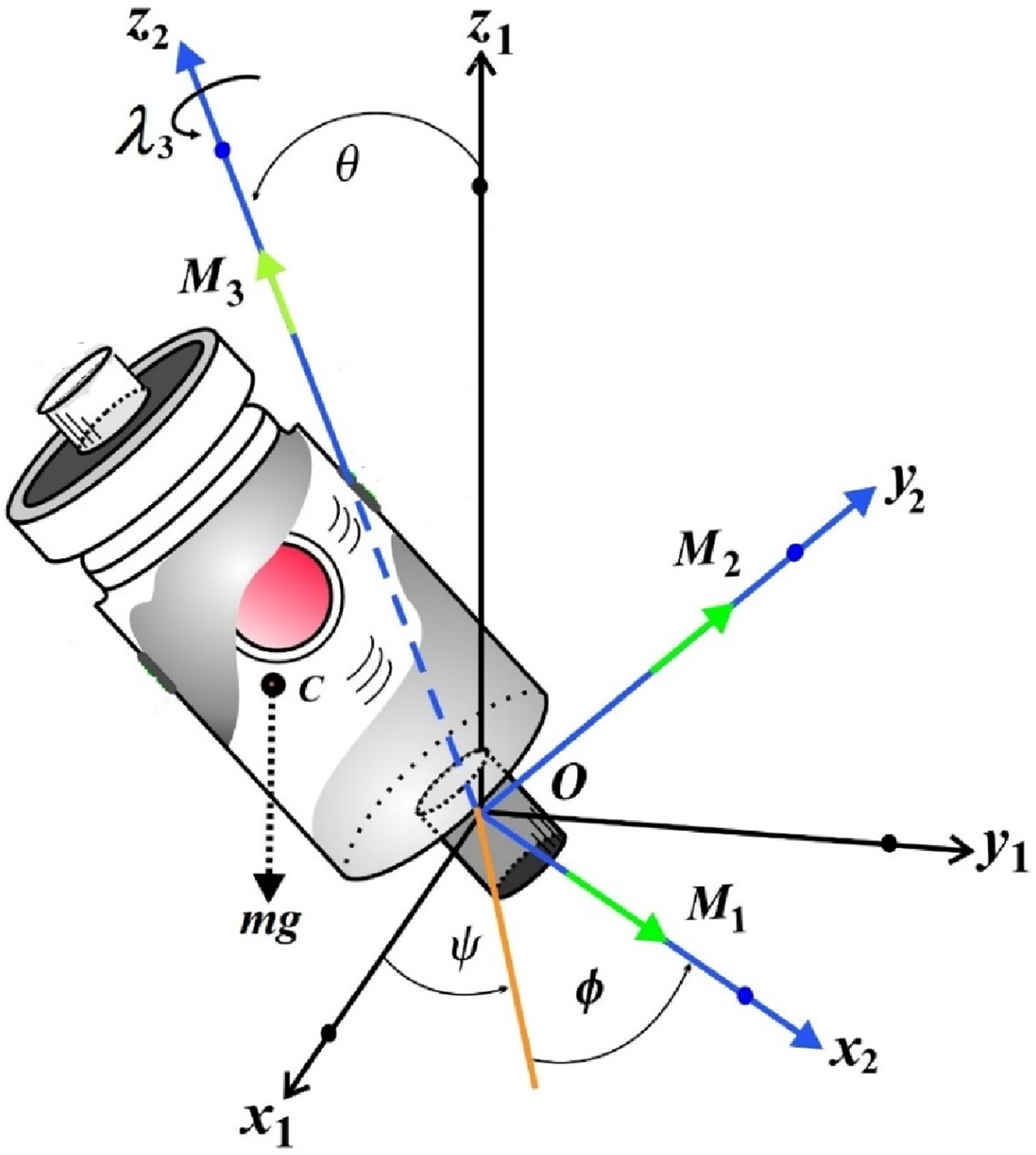
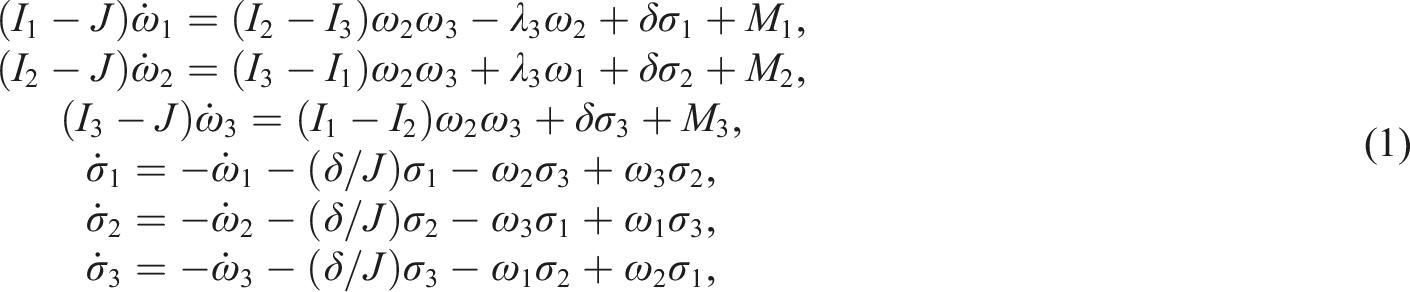
where
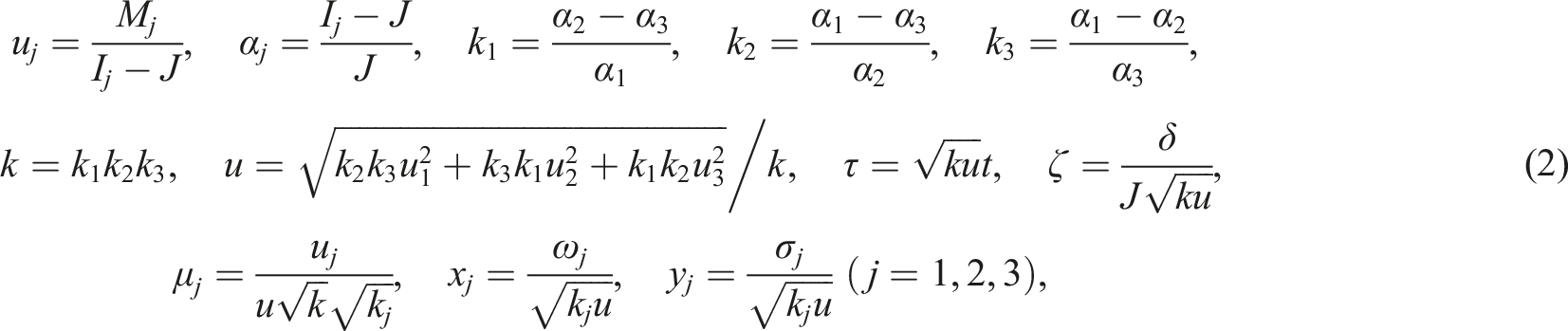
It should be highlighted that

Let us consider the case of steady state in which
By multiplying the fourth, fifth, and sixth equations of system (5), respectively, by


The substitution of (6) and (7) into (5) yields
We can see that the EPs for the angular velocities are the same in both the un-damped and the damped cases, as in systems (5) and (3), respectively, with the additional condition of EPs at zero for
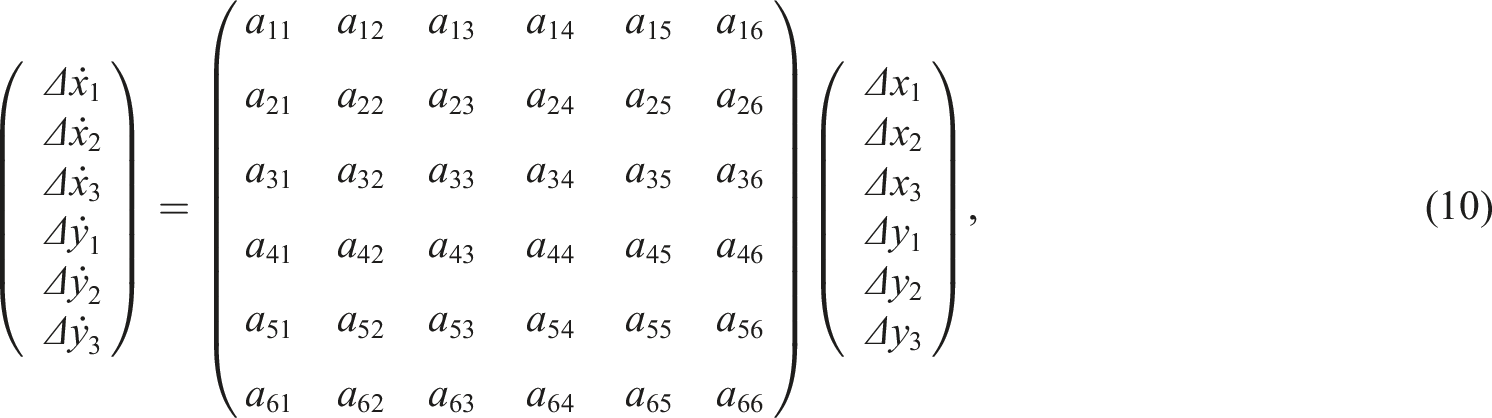
Let us define the state perturbation concepts as follows
1








Outcomes’ discussions
This section is devoted to presenting a full approach for the graphical simulation of the damped system in (3) and the state perturbation for both the damped and un-damped system in (10). It also provides us with a description of the stable and unstable regions during the body’s motion. All figures were created related to the following data
Dependence of the eventual equilibrium condition of a damp system on the nondimensional angular velocities’ initial state and the constant torque excitation.
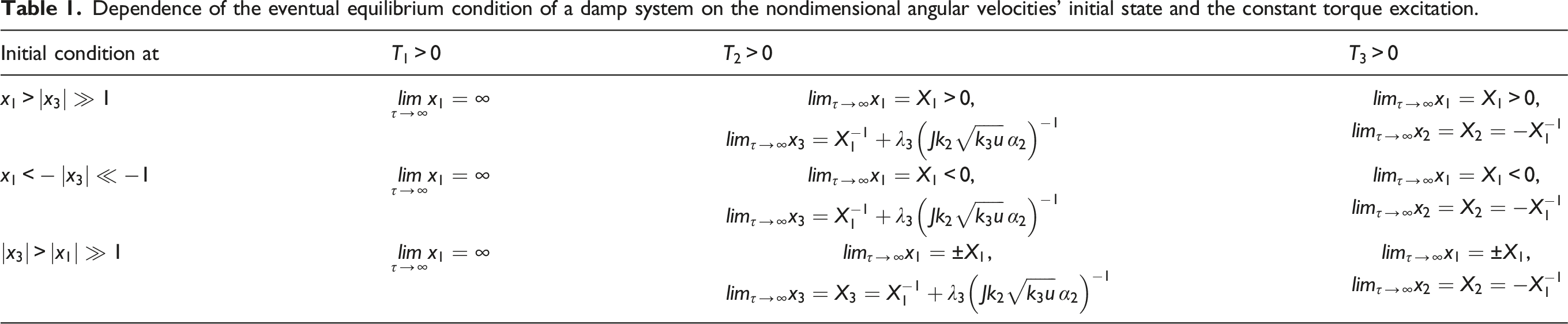
Now, we are going to examine system (3) in the absence of EPs and system (10) in the presence of EPs, in which the system may be solved using different initial conditions, to investigate the possibility of existing equilibrium areas, and to determine the different paths of the body’s movement.
For major constant axis torque
For system (3)
In the present scenario, we investigate the body’s rotational motion under the assumption that the torque along the major axis is constant. For such a case, Figures 2 and 3 are plotted corresponding to the related equilibrium conditions that are considered in the regions of Table 1 at The 3D trajectories in the space The 3D plots in the space 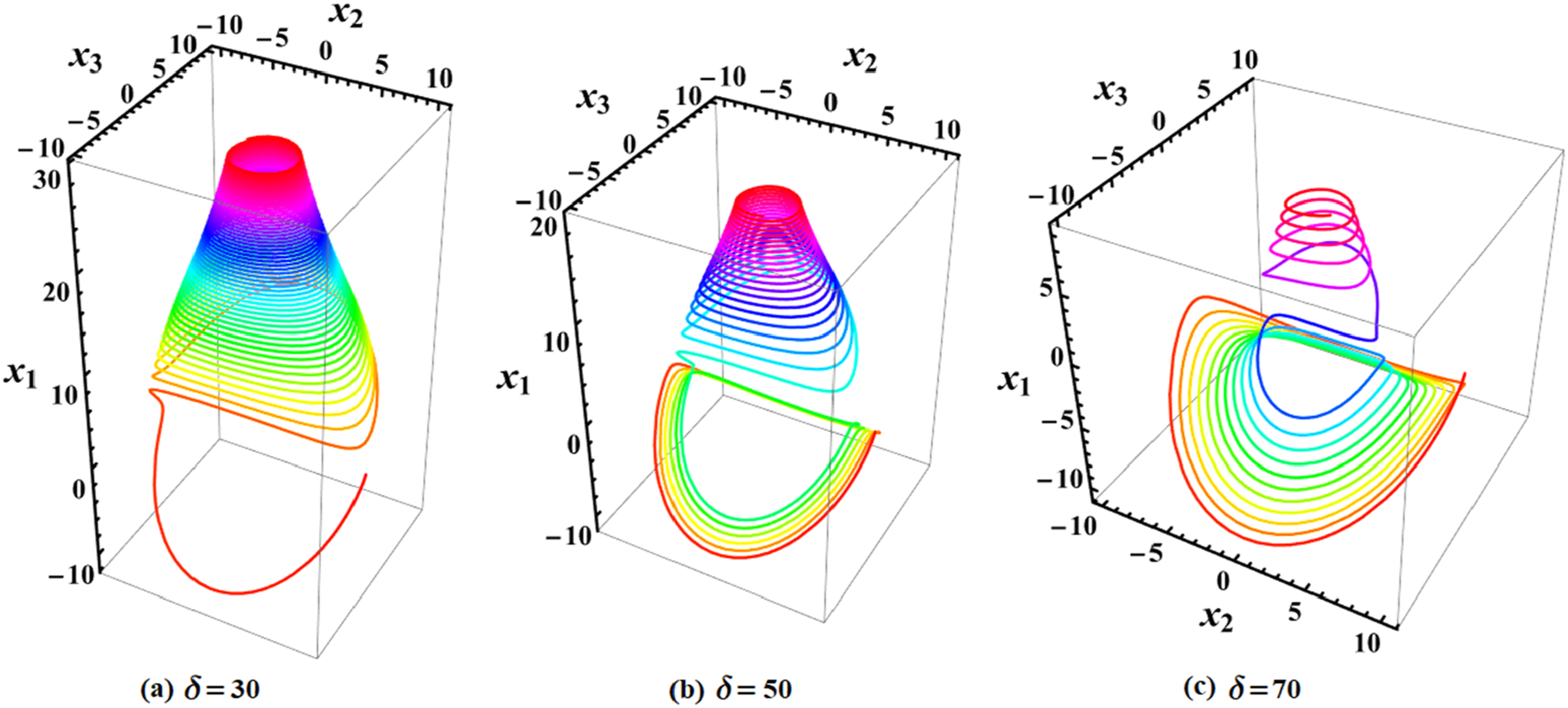
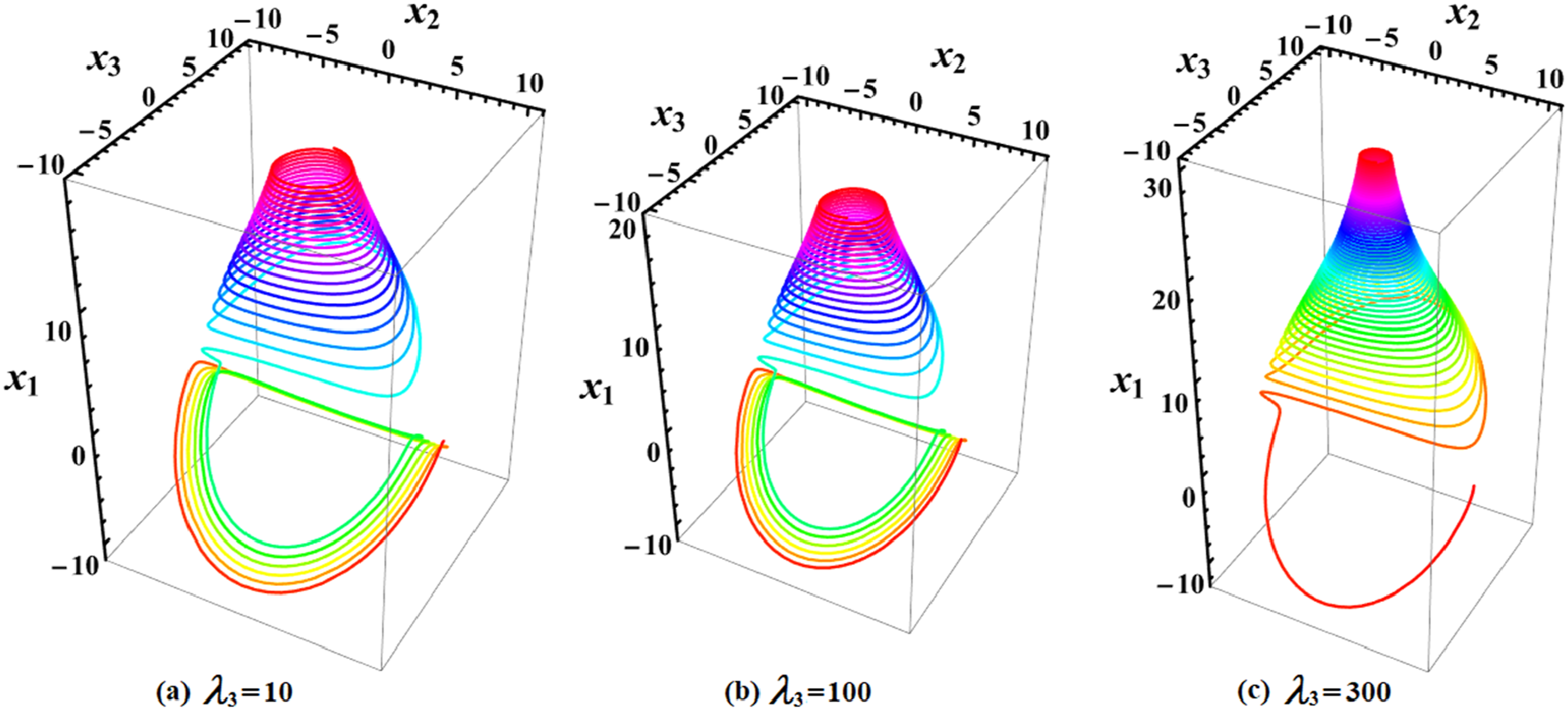
Figure 2 describes the 3D trajectories in the space
For system (10)
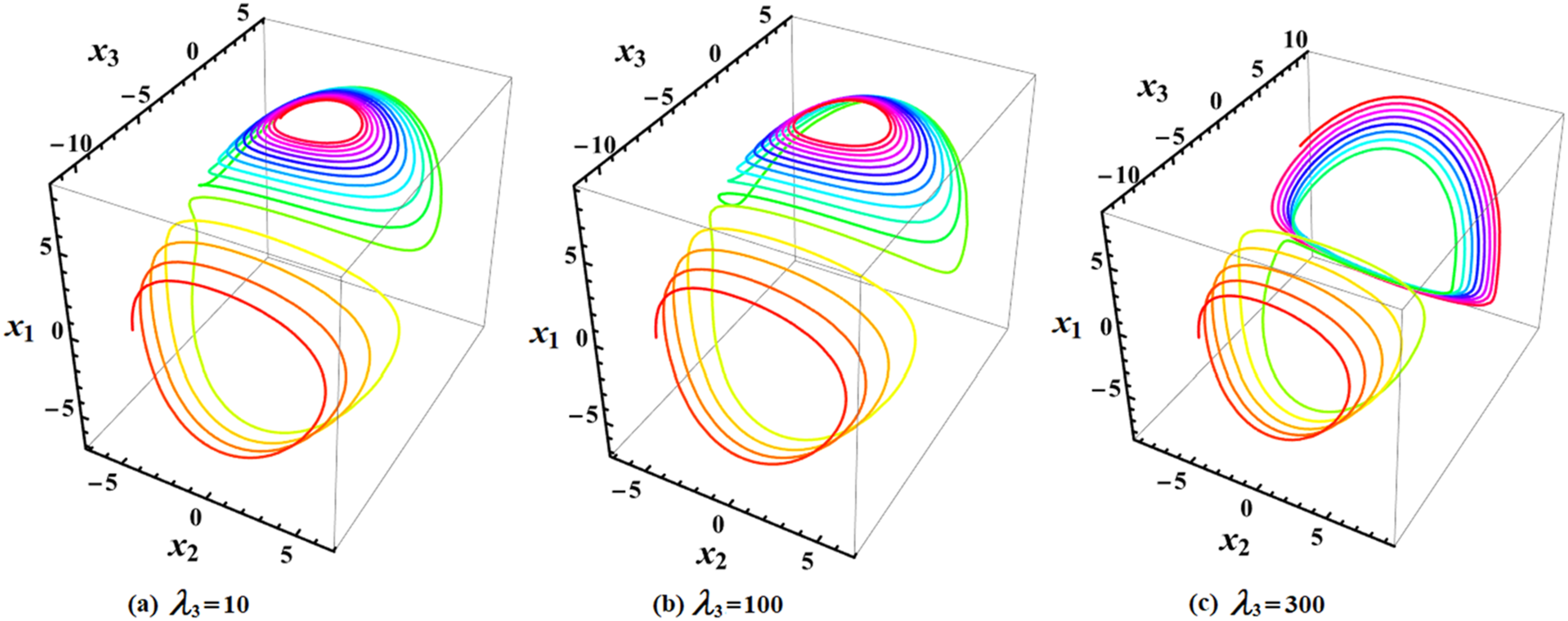
EPs for various GT values for the major axis torque.

EPs for various viscosity values for the major axis torque.

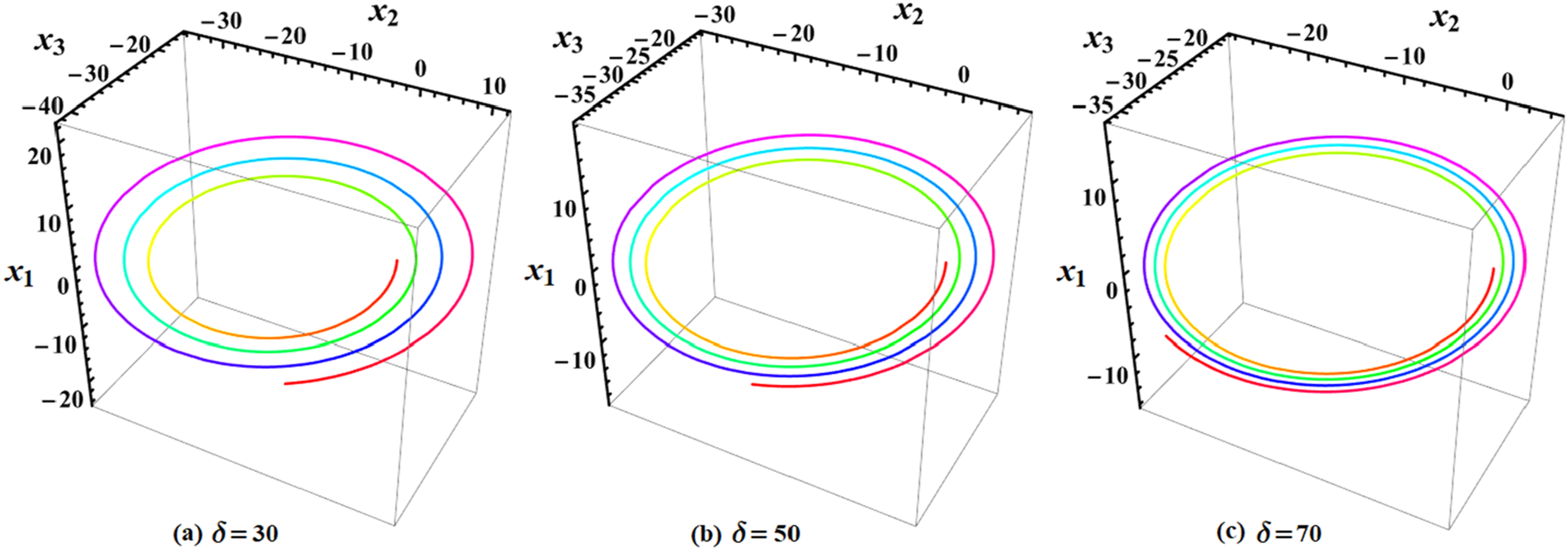
The 3D trajectories in the space
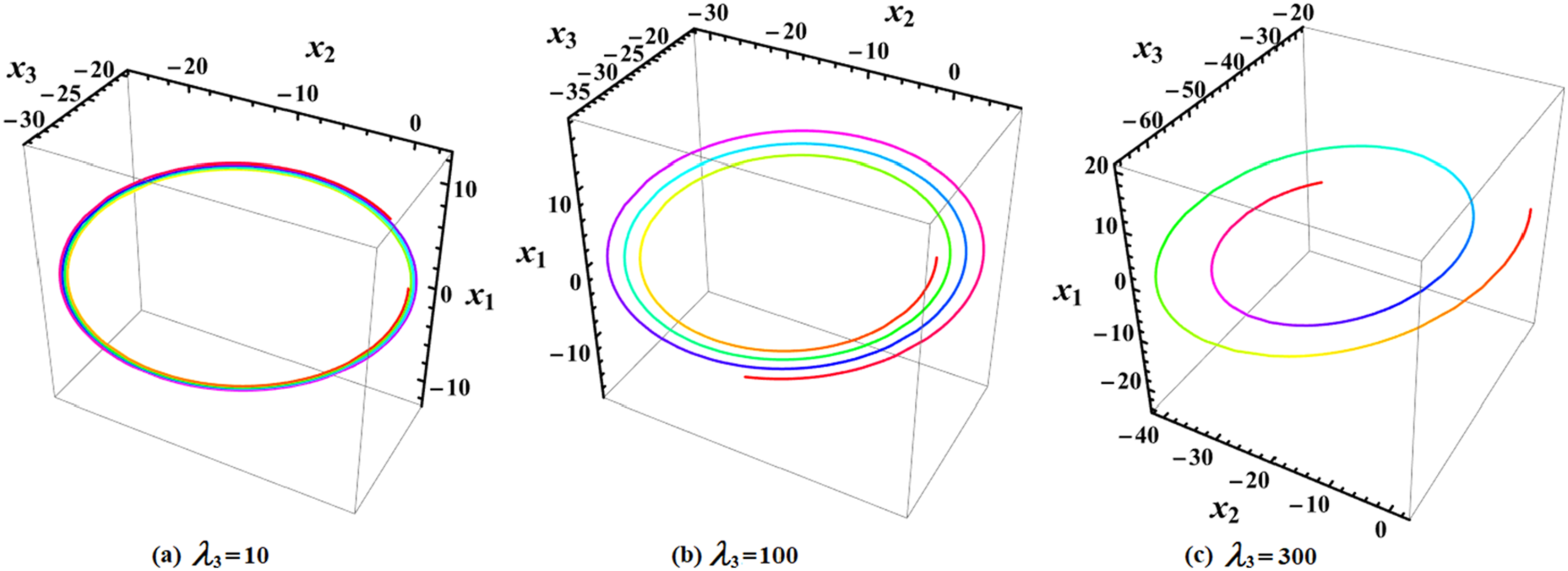
The 3D trajectories in the space
It must be mentioned that the trajectories in Figures 4 and 5 are initiated with the condition
For minor constant axis torque
For system (3)
In this case, it is investigated how the body rotates when the directed torque along the minor axis is constant. Therefore, Figures 6 and 7 are plotted to represent three various initial circumstances when The 3D plots in the space The 3D plots in the space 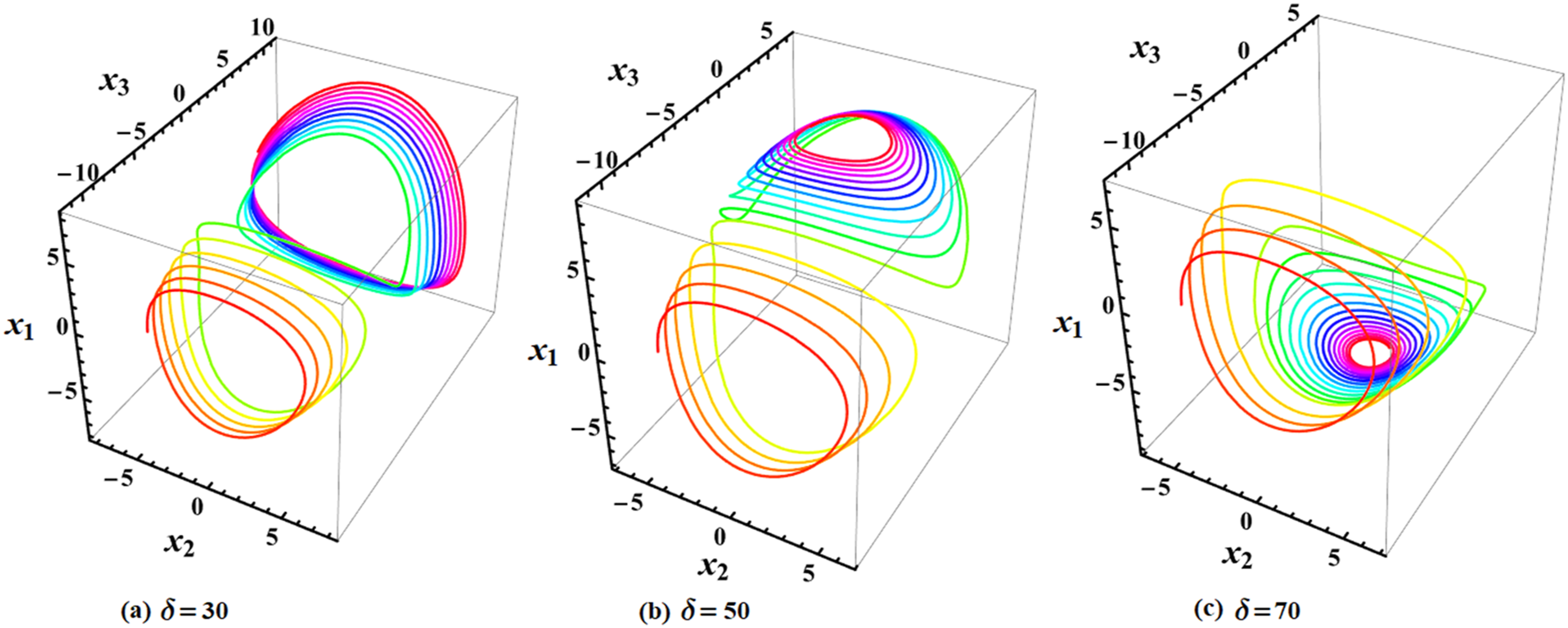
For system (10)
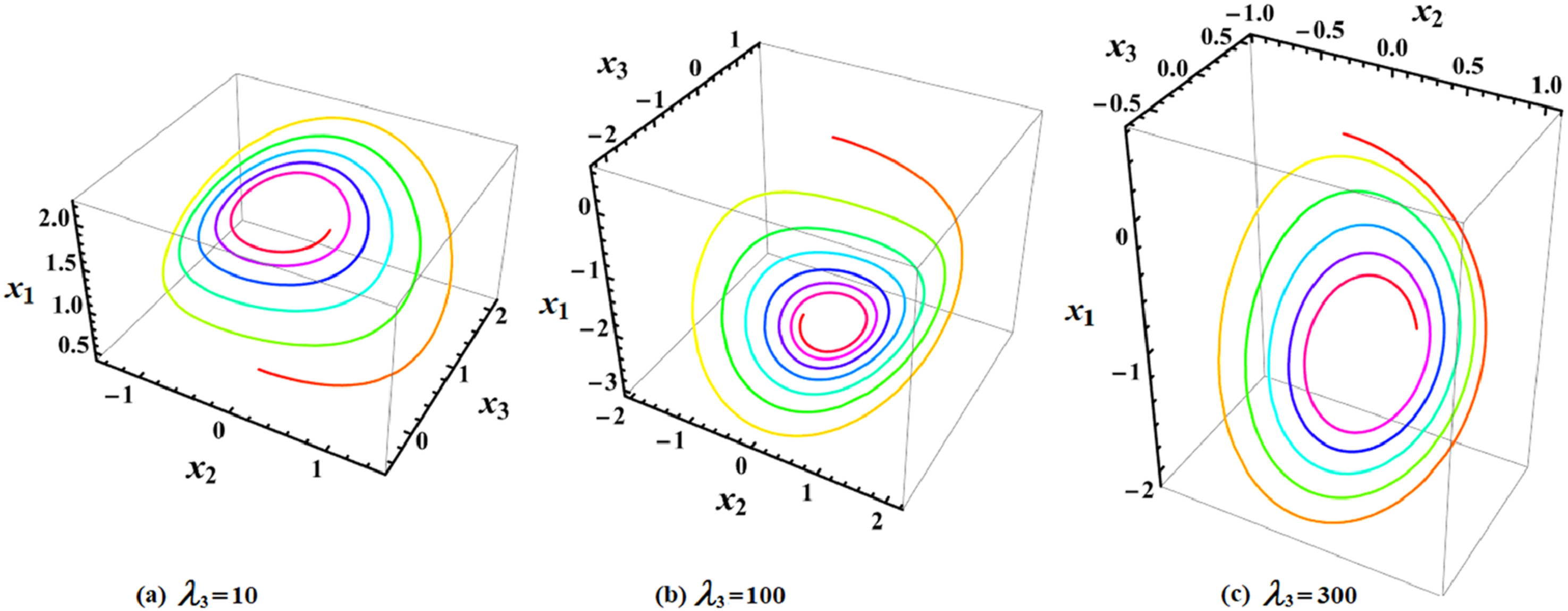
In this case, we can examine the RGB’s rotary motion under a constant torque along the minor axis at
For intermediate constant axis torque
For system (3)
In the current case, the rotatory motion of the body is examined when the directed torque along the intermediate axis is constant. Then Figures 8 and 9 have been drawn corresponding to the related equilibrium conditions that are considered in the regions of Table 1 at the values The curves in the space The curves in the space 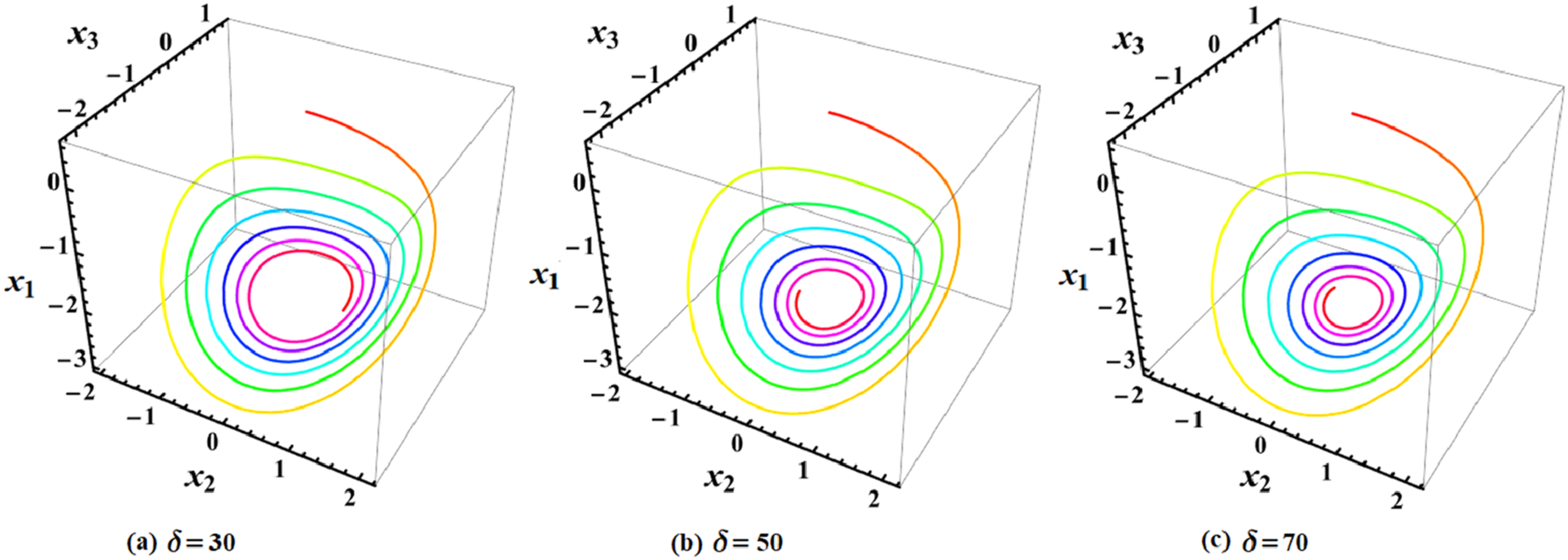
For system (10)
In the current case, we can evaluate the RGB’s motion when a constant torque along the intermediate axis is considered. Therefore, Figures 10 and 11 have been drawn according to the derived EPs from Tables 4 and 5 at the values The 3D diagrams of The 3D diagrams of EPs for various GT values for the intermediate axis torque. EPs for various viscosity values for the intermediate axis torque.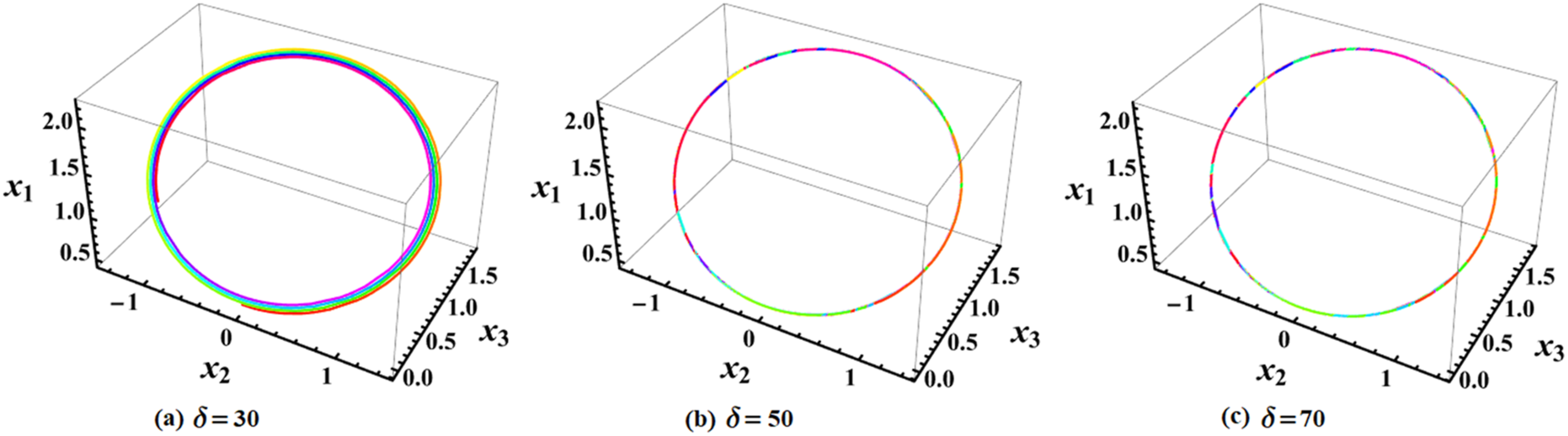
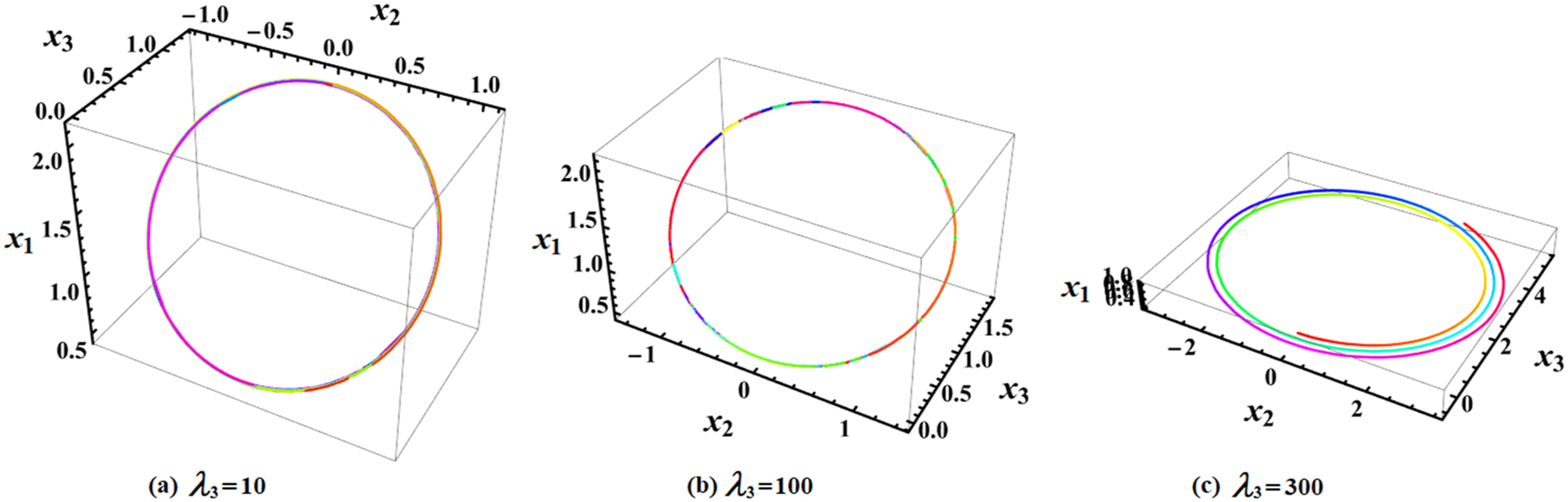


It must be mentioned that the graphed curves in Figures 10 and 11 are calculated when the motion is initiated from
To ensure the accuracy of our investigation methodology, the results achieved have been compared with the closest research,4,5,7 which had an identical outcome and displayed a 0% error rate between both techniques. Since our study on the influence of GT is unique and hasn’t been conducted before. Furthermore, the results obtained in this study generalize those reported in both Ref. 1 and Ref. 5.
Conclusion
The rotational motion of a semi-symmetric RGB with a spherical fuel slug is investigated under the influence of a constant body-fixed torque and exhibits energy dissipation and the GT. The nondimensional EOMs that depend on only five parameters are derived. It is demonstrated that the equilibrium condition of the semi-RGB is equivalent to that of the RGB with no relative motion between the fuel slug and the RGB. Extensive simulations are performed using a general semi-RGB that is influenced by GT with constant torques about its major, intermediate, or minor axes. The results are divided into two parts, that is, the damp motion with no EPs and the state perturbation with EPs. The more the viscosity of the layer increases, the more stable and periodic the motion becomes. On the other hand, the more the GT becomes, the lesser the motion becomes stable and periodic. So, these two parameters can serve as key points on controlling the stability and the periodicity of the 3D RGB’s rotational motion. These results provide insights into the complex behavior of asymmetric RGBs under external forces which have a significant impact on studying, maintaining, and controlling rigid celestial bodies’ motion in space and can be useful in designing and analyzing systems that involve such bodies as satellites, spacecraft, and molecules. The results also have implications for fundamental physics, as they contribute to our understanding of the dynamics of rotating bodies in fields of various intensities and orientations. Further research in this area may lead to discoveries and applications in fields ranging from engineering to astrophysics.
Footnotes
Author contributions
T. S. Amer: Supervision, investigation, methodology, data curation, conceptualization, validation, reviewing, and editing. H. F. El-Kafly: Resources, methodology, conceptualization, validation, formal analysis, visualization, and reviewing. A. H. Elneklawy: Methodology, conceptualization, data curation, validation, and writing-original draft preparation. A. A. Galal: Supervision, conceptualization, resources, formal analysis, validation, writing-original draft preparation, visualization, and reviewing.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.